Halo habuchitel sayang!
GPS bawah laut kami baru saja berusia tiga tahun. Selama waktu ini, sistem menjadi serial, kami membawa beberapa sistem dan perangkat lagi ke pasar, tetapi selama ini saya tidak meninggalkan obsesi untuk membawa hydroacoustics kepada massa, untuk membuatnya dapat diakses oleh pecinta biasa, pemodel, perwakilan dari arah seperti ilmu pengetahuan warga
kota gila dan tertarik lainnya.
Dan hari ini, untuk menghormati ulang tahun kami yang sederhana, saya akan menjelaskan secara rinci dan dengan jari bagaimana menentukan lokasi geografis objek bawah laut hanya dengan menggunakan dua transceiver: dengan kode sumber, gambar lucu, grafik dan hasil eksperimen.
Saya meminta semua yang tertarik dengan kayak, di perairan Waduk Volgograd yang bersih dan hangat!
 PERHATIAN: artikel berisi jejak jumlah matan!
PERHATIAN: artikel berisi jejak jumlah matan!Bagi mereka yang tidak mengerti apa yang terjadi, tetapi tidak keberatan melihatnya, saya sarankan Anda membiasakan diri dengan publikasi kami sebelumnya tentang masalah hidroousousika dan navigasi bawah laut:
Sesi transmisi video suara melalui air dengan pencahayaanGPS bawah laut dari awal per tahunGPS bawah air: lanjutanTentang efek cyanobacteria pada fungsi pidato presidenNavigasi di bawah air: arahan temuan - jangan arahan menemukan, Anda ditakdirkan untuk suksesDan juga dengan
artikel ulasan bagus
oleh akuzmin tentang
hidroousousikaPendahuluan
Di bawah air, gelombang radio tidak meluas ke jarak yang signifikan, dan komunikasi nirkabel dan navigasi yang kurang lebih baik di sana, secara langsung, hanya mungkin dilakukan dengan bantuan akustik.
Hanya ada dua setengah jenis sistem navigasi yang berfungsi:
- ultrashort-base (USB, USBL) - didasarkan pada penentuan sudut kedatangan sinyal suar dan mengukur jarak (baik dengan metode respons-permintaan atau jam yang disinkronkan). Sudut kedatangan ditentukan menggunakan antena array. Posisi yang diinginkan ditentukan oleh sudut dan jarak (tugas geodesik langsung). Sistem UKB misalnya, adalah ZIMA kami
- jarak jauh (DB, LBL) - di mana waktu kedatangan sinyal diukur di beberapa penerima atau dari beberapa pemancar (GPS bawah laut kami berfungsi seperti itu) dengan posisi yang diketahui. Anda dapat mengukur jarak menggunakan metode "permintaan-respons" (metode pengintai) atau mengukur perbedaan dalam waktu kedatangan sinyal (metode pengukur perbedaan), misalnya, kerja GPS dan GLONASS. Basis panjang bisa mengambang (seperti RedWAVE kami) atau bawah.
- Basis pendek (KB, SB) - pada kenyataannya - sistem basis panjang yang sama, tetapi semua elemen pendukung basis terletak di basis yang sama - misalnya, di kapal.
Seperti yang saya katakan, sebuah pangkalan yang panjang dapat bekerja berdasarkan "permintaan-respons", dalam hal ini perlu untuk memecahkan masalah memotong N bola, atau lingkaran, jika kedalaman objek yang diinginkan diketahui.
Atau pangkalan dapat bekerja seperti GPS dan GLONASS, sistem seperti itu juga disebut hiperbolik, dan inilah alasannya: jika objek yang diinginkan memancarkan sinyal navigasi secara berkala, dan jam semua penerima (elemen dasar) disinkronkan, maka jaraknya tidak dapat diukur secara langsung, tetapi Anda hanya dapat mengetahui apakah elemen dasar mana yang lebih dekat atau lebih jauh. Artinya, hanya perbedaan jarak yang tersedia. Dan seperti yang Anda
ketahui dari kursus sekolah:
"Hiperbola dapat didefinisikan sebagai lokasi geometris dari titik, nilai absolut dari perbedaan jarak dari yang ke dua titik yang diberikan, disebut fokus, adalah konstan"
Dengan kata lain, jika objek bawah laut memancarkan sinyal, dan kami menerimanya pada dua penerima yang jamnya disinkronkan, maka kita dapat mengatakan bahwa objek kita terletak pada hiperboloid (atau pada hiperbola jika tiba-tiba mengirimkan kedalamannya kepada kita). Lebih banyak penerima - lebih banyak hiperbola! Lebih banyak hiperbola - akurasi lokasi lebih tinggi,
tidak ada istana - tidak ada istana .
Dan jika bukan objek bawah laut yang terpancar, tetapi elemen dasarnya, maka objek bawah laut, mengetahui kedalamannya, dapat menentukan lokasi itu sendiri, dan terlebih lagi, dalam hal ini tidak mengganggu siapa pun dan dapat ada objek sebanyak itu - mereka hanyalah pendengar. Ini adalah bagaimana GPS / GLONASS dan
RedWAVE kami
diatur .
Dan saya berjanji navigasi melalui dua transceiver, salah satunya adalah yang posisinya perlu ditentukan.
Mari kita mengerti
Jarak antara dua titik
dan
dalam ruang tiga dimensi ditentukan (Anda tidak pernah tahu, tiba-tiba seseorang lupa) dengan rumus sederhana:
Misalkan kita memiliki N BTS. Untuk alasan kemanusiaan, kami menganggap bahwa koordinat mereka diketahui oleh kami, dan kami mengukur jarak
dari masing-masing stasiun pangkalan
untuk tujuan T. Untuk kejelasan: T adalah target, dan B adalah basis.
Jadi kita bisa untuk setiap titik
tuliskan ungkapan yang menunjukkan bagaimana hal ini cocok dengan pengukuran eksperimental kami. Bahkan, ini akan menjadi jumlah perbedaan antara jarak dari titik M ke stasiun pangkalan yang sesuai dan jarak yang diukur. Kami akan menyelesaikan setiap perbedaan ini.
Secara umum, ia datang ke metode kuadrat terkecil, dan koordinat titik yang diinginkan idealnya harus minimum fungsi ε.
Jika kita berbicara tentang metode pengintai diferensial, yang akan kita bahas dalam artikel ini sepenuhnya tanpa pandang bulu, dan untuk setiap stasiun basis kita memiliki jarak yang tidak terukur
, dan waktu kedatangan sinyal
, maka dalam ekspresi fungsi kesalahan tidak akan ada jarak, tetapi perbedaannya. Satu-satunya perbedaan adalah bahwa Anda harus memilah pasangan stasiun pangkalan yang diperlukan, misalnya, untuk stasiun ke-n dan ke-1:
v - di sini berarti kecepatan suara, yang, kebetulan, tidak konstan, tetapi sangat tergantung pada kepadatan medium, baca, pada suhu, salinitas, dan tekanan. Dan jika Anda ingin melakukan semuanya dengan cara dewasa, maka Anda perlu mengukur atau menghitungnya secara langsung, tetapi tentang hal ini lain waktu.
Perhatikan bahwa kedalaman objek yang diposisikan dalam sistem navigasi sonar modern diukur secara langsung dan dengan akurasi yang cukup tinggi (0,5-2 cm), yang berarti masuk akal untuk menerjemahkan tugas menjadi tugas datar.
Mungkin untuk memberi tahu bahwa sekarang kami sedang menyelesaikan ini dengan metode optimasi apa pun dan akhiri di sini.
Tetapi, pertama, tidak semuanya begitu sederhana, dan kedua, tidak semuanya begitu rumit.Mari kita mulai dengan kesulitan
Faktanya adalah bahwa banyak tergantung pada pengaturan stasiun pangkalan relatif satu sama lain (entah bagaimana dapat dipengaruhi, misalnya, dengan metode administrasi =) dan posisi objek diposisikan, relatif terhadap unsur-unsur pangkalan (jauh lebih sulit untuk mempengaruhi ini, dalam berbagai tugas awalnya posisi objek yang diposisikan dikenal sangat kira-kira dan hampir tidak mungkin untuk membuat basis terlebih dahulu).
Dapatkan situasi seperti pada Gambar 1 - seperti halnya selamat pagi:
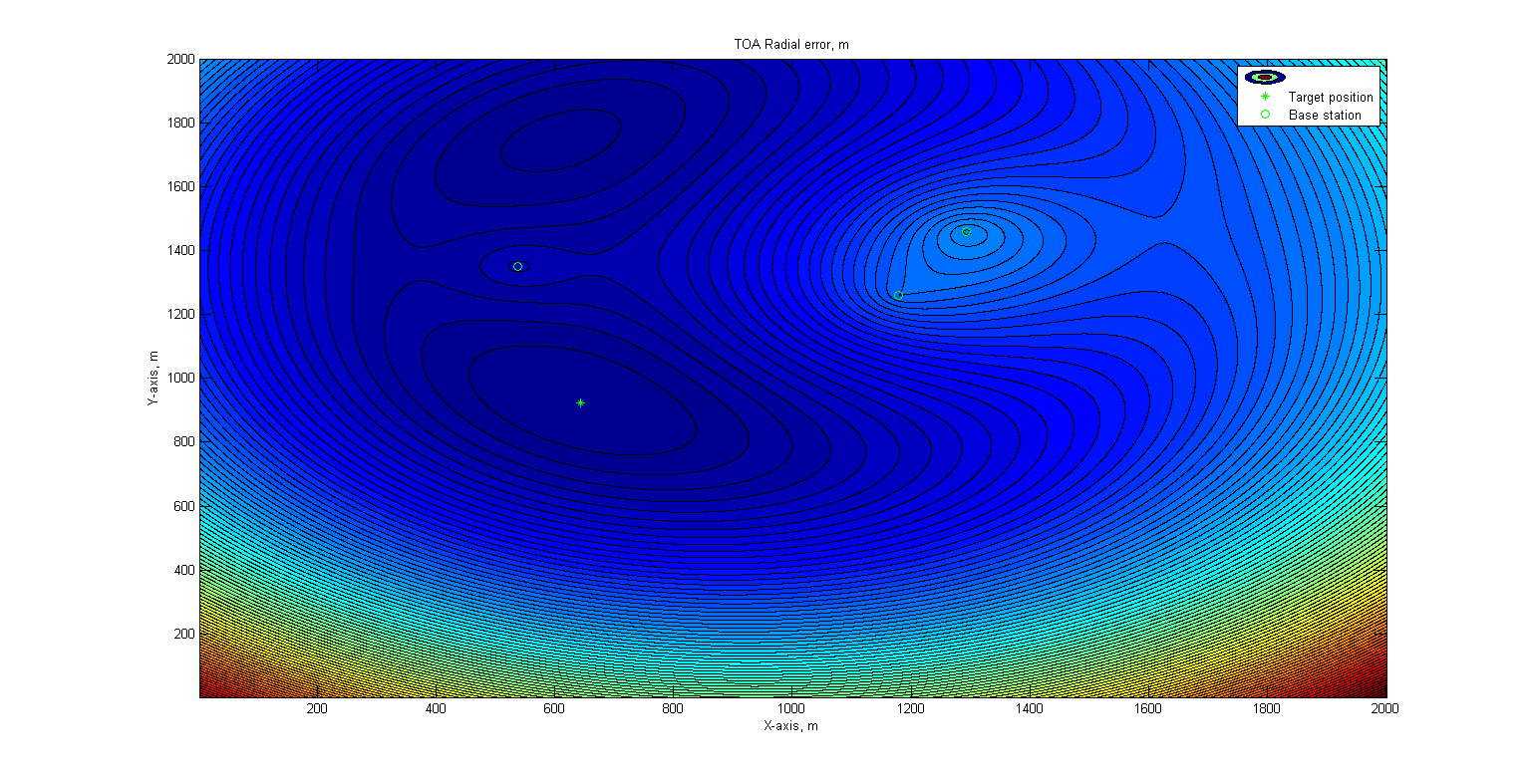 Gambar 1 - Permukaan kesalahan untuk dasar tiga elemen mereka. Objek diposisikan di luar pangkalan. Kehadiran minimum palsu
Gambar 1 - Permukaan kesalahan untuk dasar tiga elemen mereka. Objek diposisikan di luar pangkalan. Kehadiran minimum palsu
Lingkaran hijau menunjukkan posisi stasiun pangkalan, dan tanda bintang menunjukkan posisi sebenarnya dari objek yang diposisikan. Warna titik menunjukkan nilai fungsi residual (ε) pada titik itu. Seperti yang dikatakan oleh seorang politisi, jelas bahwa permukaannya memiliki dua depresi, dan ketika mencari minimum, sangat mudah jatuh ke salah. Situasinya bahkan lebih buruk: dengan mempertimbangkan skala, posisi aktual objek dan kecepatan rata-rata pergerakan objek tersebut, kita dapat mengatakan bahwa akan berada dalam posisi ini untuk waktu yang lama, bentuk permukaan kesalahan akan dipertahankan, dan sangat mungkin untuk waktu yang lama menerima data yang salah pada lokasi objek. .
Animasi di bawah ini mengilustrasikan situasi yang sama - ketika memulai pencarian dari titik tengah antara stasiun pangkalan, dan ketika memulai dari stasiun terdekat, pencarian mengarah ke minimum yang salah:
 Gambar 2 - Pencarian mencapai false minimum saat mulai dari titik tengah pangkalan. Basis dari tiga elemen
Gambar 2 - Pencarian mencapai false minimum saat mulai dari titik tengah pangkalan. Basis dari tiga elemenPencarian di sini diimplementasikan menggunakan
algoritma Nelder-Mead , atau, sebagaimana juga disebut, metode simpleks. Ini digunakan, misalnya, di Matlab dalam fungsi
fminsearchTidak memerlukan perhitungan turunan, sangat visual, intuitif dan mudah diimplementasikan.
 Gambar 3 - Pencarian mencapai false minimum ketika mulai dari elemen dasar terdekat. Basis dari tiga elemen
Gambar 3 - Pencarian mencapai false minimum ketika mulai dari elemen dasar terdekat. Basis dari tiga elemen
Orang yang berpengetahuan mungkin marah karena tidak ada yang menempatkan stasiun pangkalan di telepon, tetapi, pertama, kadang-kadang mereka lakukan, dan kedua, ini berlebihan untuk demonstrasi yang lebih visual.
“Kekalahan itu selesai. Itu tidak mungkin untuk menciptakan apa pun ”(C) A. dan B. Strugatsky,“ Kota Mati ”
Apa yang bisa Anda lakukan di sini?
Logika menyarankan agar Anda dapat menggunakan salah satu dari dua metode optimasi global -
Simulasi Annealing atau yang serupa. Namun, pendekatan lain (dan lebih produktif) adalah menggunakan informasi apriori secara lebih penuh untuk memilih titik awal pencarian.
Setelah semua, kita tahu pasti bahwa titik yang diinginkan terletak (dengan sebagian kecil dari asumsi) pada lingkaran di pusat-pusat yang ada stasiun pangkalan, dan jari-jari lingkaran ini sesuai dengan rentang yang diukur!
Dan kami juga yakin bahwa kesalahan dalam mengukur rentang hydroacoustics tumbuh dengan rentang ini: suara merambat secara non-linear.
Anda dapat mengambil dan mencoba untuk memilih titik awal untuk menemukan minimum sekitar (secara harfiah, pada lingkaran) suar terdekat, berharap bahwa jarak ke sana diukur dengan akurasi maksimum, dan dipandu oleh nilai yang sama dari fungsi residual ε.
Koordinat poin kandidat dibentuk dalam kasus ini sesuai dengan rumus sederhana berikut:
dan
- Koordinat stasiun induk terdekat (c - terdekat),
- jarak dari itu ke objek yang diposisikan.
- argumen (sudut). Jika sekarang Anda mencari minimum
bervariasi
dalam rentang dari 0 hingga 360 derajat dengan langkah, misalnya, 10 derajat, dan kemudian mencari di samping nilai ini dengan mengurangi langkah ke 1 derajat dan mempersempit area pencarian menjadi 20 (± 10) derajat, Anda dapat dengan baik menentukan perkiraan awal, yang secara praktis dalam semua kasus, itu mengenai target segera!
Dalam gambar di bawah ini, metode solusi "head-on" untuk 30 iterasi dengan gagah berani jatuh ke dalam false minimum, yang mengarah ke solusi yang benar-benar salah, dan metode dengan minimisasi satu dimensi awal hampir langsung mengenai titik dan dalam 6 iterasi mendekati posisi aktual dengan divergensi ~ 25 sentimeter pada jarak ke stasiun pangkalan terdekat adalah ~ 400 meter.
 Gambar 4 - Pencarian mencapai minimum salah
Gambar 4 - Pencarian mencapai minimum salah Gambar 5 - Menemukan solusi yang tepat ketika mulai dari titik yang diperoleh dengan minimalisasi satu dimensi awal
Gambar 5 - Menemukan solusi yang tepat ketika mulai dari titik yang diperoleh dengan minimalisasi satu dimensi awal Gambar 6 - Area yang diperbesar di sekitar solusi yang dihasilkan. Lingkaran kuning adalah solusi yang diterima, bintang hijau adalah posisi sebenarnya dari objek
Gambar 6 - Area yang diperbesar di sekitar solusi yang dihasilkan. Lingkaran kuning adalah solusi yang diterima, bintang hijau adalah posisi sebenarnya dari objekDalam contoh di atas, iterasi pertama setelah pemilihan awal posisi pencarian awal memberikan solusi 20 meter dari posisi sebenarnya (di lapangan ~ 600x600 meter).
Pada tahap ini, kami menemukan metode pengintai, situasi perbedaan-pengintai sedikit lebih rumit: tidak ada pedoman yang jelas untuk memilih titik awal (lingkaran adalah angka yang baik karena ditutup, dan hiperbola buruk karena tidak terhingga).
Kembali ke "GPS bawah air" yang dijanjikan dari dua transceiver. Dalam arti tertentu, saya tentu saja cerdik: sebagai GPS bawah air yang lengkap, itu tidak mungkin dari
artikel pertama kami , tetapi jika Anda
tidak punya uang untuk membeli perangkat yang tepat, bertahan dengan beberapa keterbatasan dan terutama memikirkan berbagai tugas tertentu, Anda masih dapat melakukan sesuatu.
Objek yang sering diposisikan tidak bergerak (atau setidaknya bergerak dengan lambat). Dalam kasus seperti itu, alih-alih beberapa BTS, Anda benar-benar dapat menggunakannya, tetapi bergerak: pendekatan ini disebut VLBL atau virtual long base. Jika kita tidak perlu memperbaiki jejak pergerakan objek bawah laut, tetapi cukup menentukan lokasinya, inilah yang kita butuhkan.
Seringkali masalah ini muncul ketika memasang peralatan bawah dengan bebas pembuangan dari kapal. Dengan kedalaman yang nyata dan kehadiran arus, posisi aktual peralatan di bagian bawah dapat berbeda secara signifikan dari posisi titik di mana ia dibuang. Peralatan ini juga dapat menjadi elemen dasar navigasi bawah: untuk menentukan lokasi objek bawah laut, Anda harus terlebih dahulu menentukan lokasi objek bawah laut.
Jadi bagaimana semua ini bisa diatur di dunia nyata?
Pengaturan eksperimental kami terdiri dari:
- objek yang akan kita sembunyikan di bagian bawah reservoir: modem kode RedGTR kami dalam versi yang berdiri sendiri (sebenarnya hanya terdengar resmi - modem yang terhubung ke kotak baterai yang disegel); Ini ada di foto:

Gambar 7 - Beacon Responder dengan Tabung Baterai
- stasiun pangkalan bergerak yang didasarkan pada kapal umpan Tiongkok dari artikel kami yang lain . Dia sudah ada di papan, di samping pengisian kendali asalnya, modem RedGTR kedua, modul radio DORJI 433 MHz dengan antena, modul GPS / GLONASS buatan sendiri berdasarkan quectel l76, motherboardnya sendiri berdasarkan STM32F429 (dapat dengan mudah diganti dengan NUCLEO-STM429 atau STM32F4 Discovery Saya yakin bahwa papan seperti Arduino juga akan melakukannya) yang hanya memainkan peran router: semuanya berjalan ke modem dari saluran radio melalui UART dan sebaliknya, data dari modul GPS juga dialirkan ke saluran radio.
Jadi sepertinya perakitan:

Gambar 8 - Foto perakitan perahu uji
Kali ini kami menyematkan semacam jendela di atas untuk memasang tongkat dengan modem, pengalaman navigator bebas ditarik mengungkapkan kekejaman dari skema seperti itu, baik dalam hal pengendalian dan dalam hal perubahan posisi relatif perangkat dan kapal.
Jadi terlihat di ruang tunggu:
Gambar 9 - Foto kerajinan uji. Lihat penahanan
Semua sirkuit asli tetap hampir tidak berubah, dan semua peralatan tambahan didukung oleh baterai timah terpisah pada 1,2 A * h.
- konsol operator, yang mencakup laptop dengan perangkat lunak dan modul radio respons yang terhubung melalui USB ke konverter. Perangkat lunak ini tentu saja agak terburu-buru dan hanya cocok untuk demonstrasi, tetapi sudah ada protokol yang diterapkan untuk berinteraksi dengan modem, pemecah TOA, berdasarkan metode Nelder-Mead yang sama, pemilihan titik dasar, gambar sederhana dari lokasi geografis, serta kemampuan untuk meniru GPS untuk pengiriman data ke beberapa analog dari Google Earth.
Gambar 10 - “Konsol Operator”. Uji coba di atas meja.
Titik-titik biru menunjukkan posisi GPS kapal, titik-titik hijau menunjukkan posisi di mana pengukuran dilakukan, posisi elemen basis virtual disorot oleh salmon, dan posisi yang dihitung dari suar responden disorot dalam warna merah.
Siapa yang sibuk dengan apa?
- modem yang ingin Anda temukan, hanya terletak di bagian bawah, menerima dan menanggapi permintaan;
- modem yang ada di kapal menjalankan perintah yang telah tiba melalui UART - mengirim permintaan dan menerima tanggapan, seperti yang dilaporkan oleh UART
- papan dengan STM32F4 di kapal menerima data dari GPS dan modem melalui UART dan mengarahkannya ke modul radio sesuai dengan UART lain, dan itu mengarahkan data dari modul radio ke modem; Ada nuansa kecil yang terkait dengan modul radio - itu bukan dupleks penuh (seperti di hydroacoustic =)), oleh karena itu papan "memegang" pesan RMC dari modul GPS dan mengirimkannya hanya bersama dengan pesan dari modem;
- perangkat lunak kendali jarak jauh mengontrol seluruh tindakan, mengumpulkan data pada jarak ke target dari lokasi geografis yang berbeda, memilih basis optimal dan menentukan lokasi target;
Sedikit lebih detail
Berkomunikasi dengan modem terjadi melalui protokol mirip NMEA. Untuk tugas kami, hanya tiga pesan yang digunakan:
$PTNTE,targetAddr,requestedCmd,timeoutMs*hhdari jarak jauh ke modem. Kirim perintah Cmd yang
requestedCmd ke pelanggan jarak jauh di
targetAddr , atur batas waktu respons ke waktu habis.
Perintah dapat berupa daftar yang disetujui:
| Tim | Kode | Deskripsi |
|---|
| CDS_CMD_PING | 0 | Permintaan PING yang dijawab oleh pelanggan jarak jauh PONG |
| CDS_CMD_PONG | 1 | Membalas Permintaan PING |
| CDS_CMD_DPT | 2 | Perintahkan pelanggan jarak jauh untuk mengirimkan kedalamannya |
| CDS_CMD_TMP | 3 | Perintahkan pelanggan jarak jauh untuk mentransfer suhunya |
| CDS_CMD_BAT | 4 | Perintah untuk pelanggan jarak jauh untuk mengirimkan tegangan kekuatannya |
| CDS_CMD_USR_0 | 5 | Tim pengguna 1 |
| CDS_CMD_USR_1 | 6 | Tim Pengguna 2 |
| .. | .. | .. |
| CDS_CMD_USR_34 | 39 | Tim pengguna 34 |
Modem mendukung fungsi-fungsi dasar: ping, kedalaman transmisi, suhu air, daya baterai, dan seperangkat perintah kode pengguna.
Modem segera menjawab perintah TNTE tentang fakta menerima perintah atau ketidakmampuan untuk mengeksekusinya dengan pesan ACK:
$PTNT0,errCodeerrCode - 0 jika modem menerima perintah, jika tidak maka kode kesalahan
Jika modem tidak menunggu pelanggan jarak jauh untuk merespons dalam waktu, ia melaporkan ini dengan pesan
REM_TIMEOUT yang hanya berisi alamat pelanggan jarak jauh di bidang parameter:
$PTNTB,targetAddrJika modem menerima jawaban tepat waktu, maka ia melaporkannya dengan perintah
REM_PONGEX , yang memiliki format berikut:
$PTNTD,requestedAddr,requestedCmd,receivedValue_decoded,snrd,dpl,pTime,[dst],[dpt],[tmp]requestedAddr - alamat pelanggan yang diminta
requestedCmd - perintah yang diminta
receivedValue_decoded - nilai yang diterima
snrd -
snrd signal-to-noise pada output receiver dalam dB
dpl - Pergeseran Doppler dalam Hz
pTime - waktu propagasi sinyal (satu arah) dalam detik
dst - jarak ke pelanggan dalam meter
dpt - kedalaman modem sendiri dalam meter
tmp - suhu air tempel dalam derajat Celcius
Tiga parameter terakhir dikirimkan hanya jika modem dirancang dengan sensor tekanan / suhu terintegrasi (opsi kami).
Dari modul GPS kami hanya tertarik pada pesan RMC, dari mana kami mendapatkan posisi geografis saat ini (kami bisa menggunakan GGA atau GLL - yang terpendek terakhir).
Hal yang paling sulit - mentransmisikan data melalui air dan mengukur jarak - dilakukan oleh modem, menentukan posisi geografis kapal - modul GPS, hanya sedikit yang tersisa - untuk menggunakan data ini dengan benar.
Semua penguraian dan pembuatan pesan NMEA dilakukan menggunakan kelas NMEAParser di pustaka
UCNLNMEA .
Perangkat lunak konsol yang berjalan di laptop secara berkala mengirimkan permintaan
REM_PINGEX ke pelanggan di alamat yang ditentukan dalam pengaturan aplikasi, ia melakukan ini baik setelah menerima
REM_TIMEOUT atau
REM_PONGEX . Sepanjang jalan, koordinat kapal dicatat dan data tentang jarak dan kedalaman pelanggan jarak jauh disimpan bersama dengan koordinat kapal tempat mereka diterima.
Akal sehat (dan pengalaman) memberi tahu kita bahwa untuk menentukan posisi objek bawah laut, diperlukan 3-5 BTS virtual, dan seperti yang dapat dilihat dari gambar di atas, mereka tidak boleh terletak bagaimanapun.
Artinya, tugas berikut ini terbentuk: ketika pengukuran diterima, perlu untuk memilih beberapa dari mereka sebagai elemen dari basis navigasi dengan cara tertentu.
Saya mengusulkan opsi berikut: pilih pengukuran seperti itu sehingga mereka membentuk angka paling cembung yang dijelaskan di sekitar perkiraan lokasi objek yang diposisikan.
Untuk melakukan ini, ambil titik tertentu (pada tahap awal, ketika tidak jelas di mana objek diposisikan, titik tengah semua pengukuran akan muncul, yang kemudian akan digantikan oleh perkiraan pertama dari posisi objek yang diinginkan), dan menghitung sudut azimuth dari itu (sudut antara arah ke utara dan arah ke point) untuk setiap titik pengukuran. Dan sekarang kita akan memilih beberapa yang paling merata akan mencakup rentang sudut yang dihasilkan. Dalam kendali jarak jauh, ini dilakukan dengan metode
List<Measurement> Measurements.GetBase();
Saat data tiba, dalam metode di mana pesan REM_PONGEX
REM_PONGEX ,
REM_PONGEX menambahkan pengukuran dan mencoba membangun basis navigasi dan menyelesaikan masalah navigasi dengannya. Metode bertanggung jawab untuk ini.
GeoPoint3DWE LocateLBL_NLM(List<Measurements> base, GeoPoint3DWE prevLocation, double rErrorThreshold, out double stStageRErr, out int itCnt);
Basis itu sendiri dipindahkan ke sana - set pengukuran yang kami pilih untuk menyelesaikan masalah navigasi, posisi sebelumnya (jika ada, kedalaman objek yang diinginkan juga ditransmisikan di sana), ambang kesalahan radial, dan dua parameter output diagnostik - kesalahan radial pada tahap pertama dari solusi (sesuai dengan optimasi satu dimensi) dan jumlah iterasi, setelah itu solusi diperoleh pada tahap kedua.
Jika solusi yang kami puas disebabkan oleh kesalahan radial, maka kami akan menggunakan solusi ini sebagai titik referensi untuk membangun basis.
Dan sampai kita lelah, kita akan mendapatkan solusi yang memuaskan kita.
Metode
LocateLBL_NLM , seperti namanya, memecahkan masalah
menggunakan metode Nelder-Mead , yang sebelumnya melakukan optimasi satu dimensi jika tidak ada solusi sebelumnya. Pada kenyataannya, Anda mungkin tidak terikat dengan hasil sebelumnya, tetapi terapkan optimasi satu dimensi secara terus menerus - strateginya mungkin berbeda dan tergantung pada kondisi tertentu.
Untuk kesederhanaan, solusi dilakukan dalam meter, untuk itu, sebelum dimulainya solusi, semua koordinat ditransfer ke sistem lokal, dengan asal di titik tengah pangkalan navigasi. Setelah menyelesaikan, hasilnya diterjemahkan kembali ke dalam bujur dan lintang geografis (bujur adalah X, dan lintang adalah Y). Untuk menerjemahkan derajat ke dalam meter dan mundur, kelas Navigasi berisi metode GetDistance2DDeg dan Meters2Deg.
Tapi, seperti yang Anda tahu, sebuah teori tanpa latihan sudah mati, dan sekarang saatnya untuk beralih ke hasil percobaan lapangan.
Mari kita menghidupkan kembali teorinya dengan verifikasi praktis
Menurut tradisi lama, kami melakukan tes di
mulut Sungai Pichuga . Ini adalah tempat yang nyaman, ada kedalaman hingga hampir 30 meter, dan area air yang agak rumit.
Mercusuar terdakwa dipasang pada "dudukan" betis khusus (balkon busa busa dan jangkar yang membantu seluruh struktur untuk tetap tegak tidak termasuk dalam bingkai):
 Gambar 11 - Penjawab suar “Bottom Station”
Gambar 11 - Penjawab suar “Bottom Station”Pemasangan mercusuar difilmkan di
video , mereka tidak dihitung sedikit dengan cahaya dan lupa membawa senter, sehingga saat kontak dengan tanah tetap tersembunyi dalam kegelapan.
Sementara mereka akan menguji, mereka memberi nama pada kapal:
 Gambar 12 - “Palych” di lingkungan alami
Gambar 12 - “Palych” di lingkungan alamiPada jendela "Palychu", ikatan nilon diamankan sepotong dari joran, di mana modem RedGTR berada (agar tidak hang out dan muncul).
Eksperimen terdiri dari fakta bahwa suar terdakwa dipasang di bagian bawah, hanya pelampung kecil yang menonjol keluar, sementara "Palych", dikendalikan dari pantai, berjalan di sekitar area air dalam lingkaran besar, remote control secara berkala meminta sesuatu dari terdakwa, misalnya, kedalamannya . Semua data ditulis ke log, dan semuanya ditampilkan di layar sesuai dengan keadaan sebenarnya. Seperti ini:
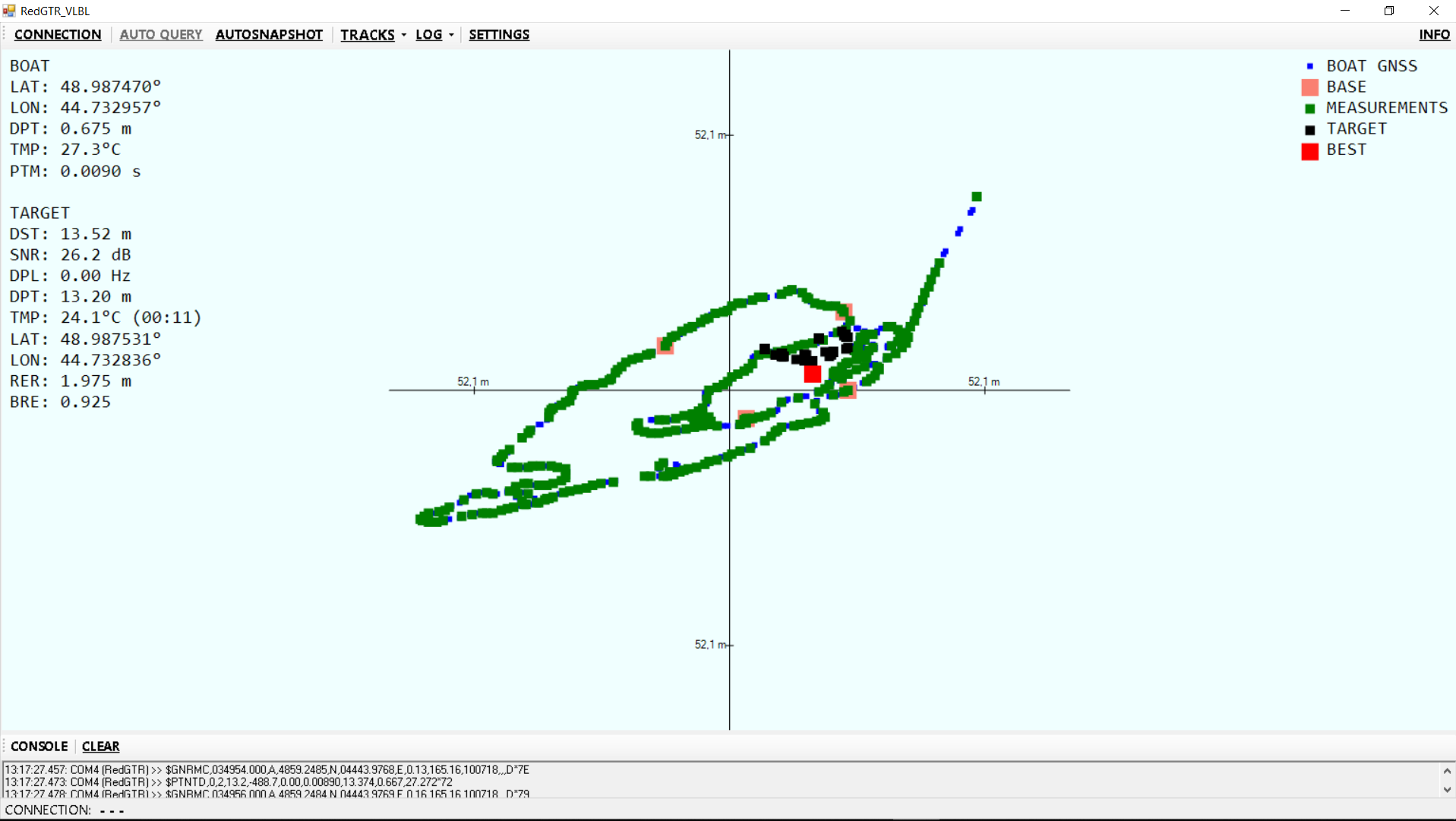 Gambar 13 - Tangkapan layar perangkat lunak kendali jarak jauh dengan lintasan kapal dan posisi yang dihitung dari suar responden (posisi perhitungan terbaik ditunjukkan dengan warna merah)
Gambar 13 - Tangkapan layar perangkat lunak kendali jarak jauh dengan lintasan kapal dan posisi yang dihitung dari suar responden (posisi perhitungan terbaik ditunjukkan dengan warna merah)Seperti yang dapat dilihat dari Gambar 13, mercusuar terletak pada kedalaman 13,2 m, dan suhu air pada kedalaman ini adalah 24,1 ° .
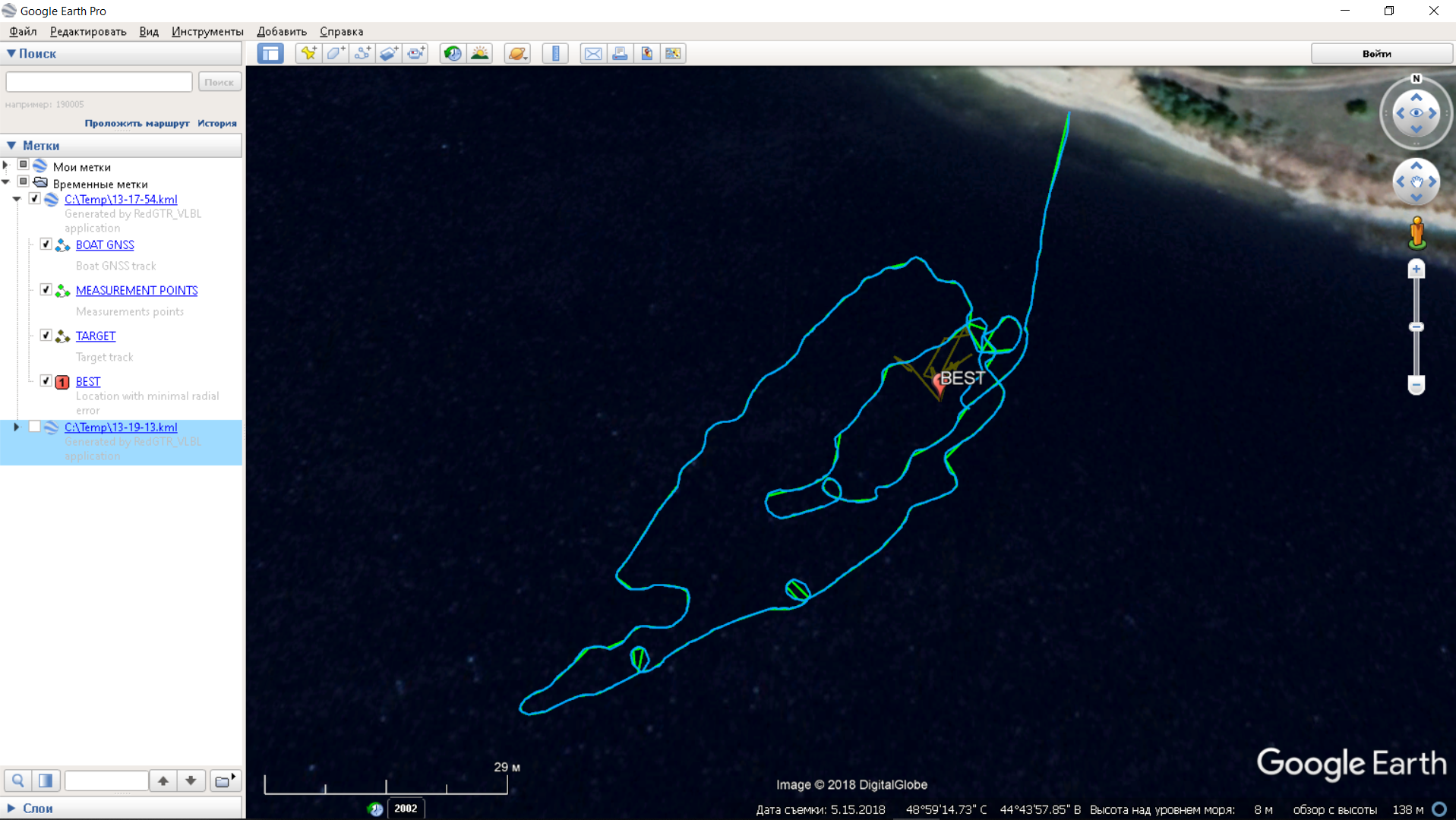 Gambar 14 - Mengimpor trek yang diterima ke GoogleEarth
Gambar 14 - Mengimpor trek yang diterima ke GoogleEarthMendapatkan hasil yang baik dalam hal ini membutuhkan waktu sekitar 15 menit berenang dari kekuatannya.
Dalam percobaan kedua, mercusuar dipasang pada kedalaman 16,5 meter, di mana yang diharapkan lebih dingin - hanya 22,6 ° C.
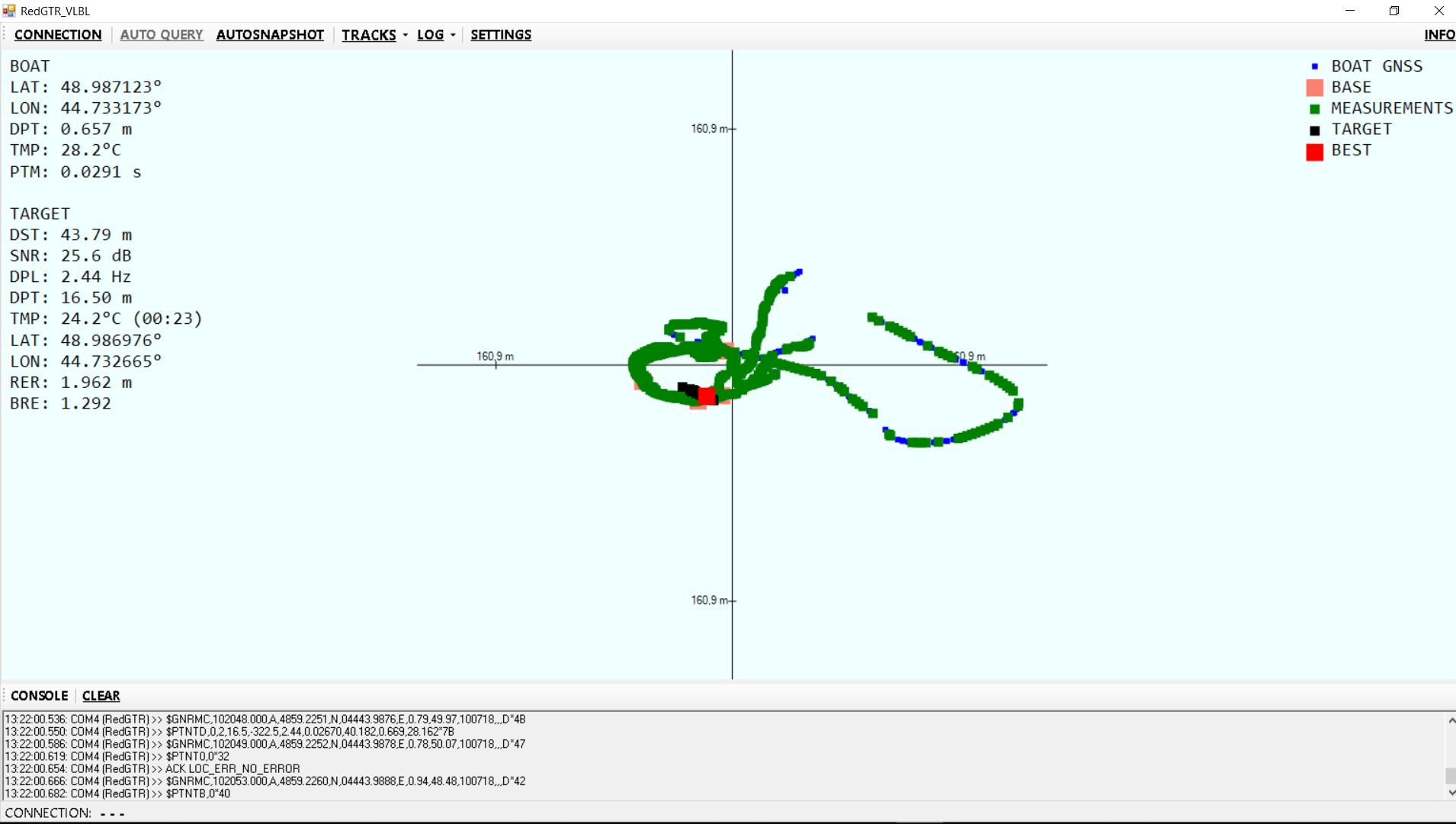 Gambar 15 - hasil menentukan lokasi suar responden dalam percobaan kedua di layar perangkat lunak remote control
Gambar 15 - hasil menentukan lokasi suar responden dalam percobaan kedua di layar perangkat lunak remote controlDalam hal ini, kami tidak berurusan dengan penilaian akurasi yang tepat karena kurangnya waktu (pada kenyataannya, tes lucu ini menyebabkan beberapa gesekan di antara manajemen, karena mereka sobek dari pekerjaan), dan merasa puas bahwa ketika kapal pergi ke pelampung (momen ini dapat dilihat pada saat
pertama kali). track ), maka dalam hal posisinya sepenuhnya bertepatan dengan solusi terbaik, dan jarak bertepatan dengan kedalaman (dengan perbedaan antara kedalaman responden dan modem yang dipasang pada kapal). Titik-titik di mana suar diatur ulang telah diperbaiki, dan perbedaan antara posisi yang dihitung dan titik pembuangan berada di wilayah 2-3 meter, yang juga menegaskan pengoperasian sistem.
Secara umum, kita dapat mengatakan bahwa konsep pembuktian ini telah berhasil diselesaikan!
Kami menerima kesenangan sejati dan terbakar sinar matahari, kami akan dengan senang hati menjawab pertanyaan dan mendengarkan kritik!
Kata penutup
Fakta yang menyedihkan adalah bahwa modem yang digunakan dalam percobaan ini, walaupun sangat murah menurut standar pasar dunia untuk komunikasi hidroakustik, masih belum dapat diakses oleh para amatir.
Agar tidak berdasar, saya akan memberikan tautan ke
karya Miss Benson yang
luar biasa , yang pada halaman 54 PDF atau 36 penomoran dokumen memiliki plat yang menarik dengan harga untuk beberapa modem sonar pada 2010. Hal-hal seperti itu. (Ada kesalahan kecil dalam tabel - rentang komunikasi Range untuk modem yang ia kembangkan ditunjukkan dalam meter, sedangkan judul kolom adalah km).
Berita baiknya adalah kita tiba-tiba mengembangkan modem yang dapat melakukan hampir semua hal yang sama (sedikit lebih kecil (pada kenyataannya, yang terkecil di dunia, dan sebelum mereka yang terkecil juga milik kita - dari artikel ini), jangkauan komunikasi lebih pendek , kecepatan transmisi yang lebih rendah), dan menurut perkiraan kami, mereka sudah cukup membangkitkan semangat bagi penggemar yang kaya. Saat ini, elektronik dan firmware sudah sepenuhnya siap, dan kami sedang menyelesaikan solusi kasing. Di akhir pengembangan, kami akan menerbitkan artikel dengan hasil verifikasi eksperimental.
Perhatian! Polling: