Selamat siang, Khabrovit sayang.
Pencarian cepat di Habr pada topik “platform lepas pantai dan pembuatan kapal” memberi, pada dasarnya, semua jenis peluncuran laut terselubung dan tenggelamnya pusat data. Saya mengusulkan untuk sedikit mencairkan topik ini.

Pada tahun 2014, perusahaan kami (ini adalah pabrik perbaikan dan pembuatan kapal) memenangkan tender untuk pembangunan blok dukungan untuk platform pengeboran lepas pantai untuk satu perusahaan minyak. Perusahaan ini beroperasi di dua bidang di Kaspia (
tautan 1 ,
tautan 2 )
Laut Kaspia di lokasi pemasangan anjungan pengeboran agak dangkal. Oleh karena itu, platform dipasang langsung di dasar laut dan diperbaiki oleh tiang pancang. Blok dukungan adalah fondasi platform. Setelah pembuatan di pabrik, ia ditarik ke tempatnya, kemudian air dituangkan ke kompartemen pemberatnya dan tenggelam ke dasar. Langkah selanjutnya adalah meletakkan platform jadi di atasnya.
Blok dibuat dalam beberapa bagian.

Sesuatu seperti itu.
Bagian dikumpulkan di bengkel, setelah itu mereka dimasukkan ke stok perakitan, di mana mereka bergabung. Ternyata ini:

Blok dukungan kami dibangun 60 meter dari pantai. Untuk peluncuran itu perlu untuk memecahkan beberapa masalah. Masalah nomor 1: struktur dengan berat 5.600 ton dan panjang sekitar 100 m harus dibawa ke pantai. Masalah nomor 2. Penting untuk membangun kapal yang dirancang untuk fakta bahwa 5.600 ton ini dilemparkan di atasnya. Kapal ini harus bisa menyelam sedikit (mis., Bekerja seperti
dermaga apung ).
Untuk mengatasi masalah No. 2, kami membeli dua kapal curah jenis Amur:

Mereka datang ke pabrik kami di bawah kekuatan mereka sendiri. Semua yang tidak perlu telah dihapus dari mereka. Dan pada akhirnya kami mendapat katamaran seperti itu.

Dia tidak bisa mandiri. Dalam setiap kasus ada 6 kompartemen pemberat. Di menara haluan adalah Central Post Office (CPU). Ruang mesin terletak di bagian bawah hidung setiap tubuh. Masing-masing memiliki dua pompa diesel dan katup kupu-kupu yang dikendalikan pneumatik, penutup pegas dan kontrol manual tambahan.

Inilah mereka. Diameter - 250mm.
Pneumatik dipilih karena kesederhanaan penyimpanan energi untuk operasi darurat, kemudahan beralih ke mode manual. Tentu saja, dimungkinkan untuk memasang katup atau penutup listrik. Tetapi dalam kasus ini, kapal harus memiliki pembangkit listrik utama penuh waktu, dan sumber listrik darurat. Dalam hal ini, semua peralatan penting ditenagai oleh baterai. Segala sesuatu yang lain memberi makan lepas pantai. Jika perlu, kami memasang beberapa generator (primer dan cadangan) di menara. Menghubungkan dan mengganti generator selama operasi tidak mengganggu pekerjaan itu sendiri.
Sebelum memasang di kapal, kami memeriksa gerbang ini di bengkel. Ketika katup pneumatik dipicu, rana dengan sedikit "pshhh" terdengar lancar dalam waktu 1,5 detik. Ketika dimatikan, itu juga ditutup dengan lancar dan tenang. Tukang kunci kami - laki-laki, yang mengencangkan dan membuka tutup kacang hingga 19 termasuk dengan tangan kosong - mengalami ekstasi estetika dan dengan ramah meminta lebih banyak lagi ...
6 gerbang mengontrol aliran air ke kompartemen pemberat. Sisanya mengatur mode operasi pompa - pengisian atau pemompaan. Semua ini diperintahkan oleh Stasiun Kontrol.

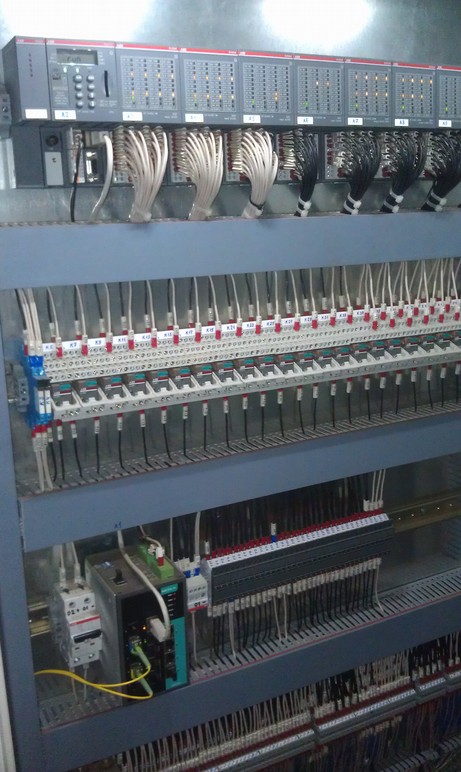
Ini jeroan ayam itiknya.
Dua Stasiun Kontrol dan kendali jarak jauh di CPU terhubung dengan topologi "Dering" dalam optik.

Dan ini remote kami.
Itu pada dasarnya dibuat tanpa tombol fisik (well, seperti "kabin kaca"). Mouse di sebelah kanan - untuk mengontrol DVR.
Saat Anda menghidupkan remote control di panel utama (besar), undangan berikut ini dihidupkan:
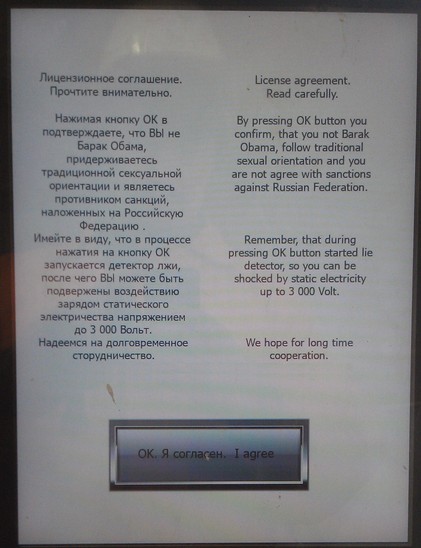
Jam berapa, seperti itu dan bercanda. Screensaver ini berulang kali diperlihatkan kepada orang asing. Tertawa, tetapi takut untuk mendorong.

Layar ini menampilkan level dan volume air di setiap kompartemen ballast serta sedimen pada 6 titik.
Sebagai sensor level, kami menggunakan sensor tekanan hidrostatik submersible dari pabrikan "zodiak" Rusia yang terkenal.

Kontrol peralatan dari setiap kasing dilakukan dari layar ini. Secara umum, setiap panel dapat mengontrol enklosur apa pun.

Dan ini adalah panel kecil - krenodifferententometr. Menunjukkan kemiringan kapal relatif terhadap permukaan air. Sumber informasi untuknya adalah sensor level berlebihan. Selanjutnya, mengetahui dimensi geometris, sudut tumit dan trim dihitung.
Kami membangun - dibangun dan akhirnya dibangun! Waktunya telah tiba untuk menguji dan menghadirkan ke berbagai otoritas pengawas.
Kami mendapat air ke kompartemen pemberat (sekitar satu meter) dan ... kejutan hidrodinamik dimulai! Mereka muncul saat mengganti mode operasi pompa, saat membuka dan menutup gerbang ballast. Dampak akustik pada membran kami dari dampak ini sangat sensitif.
Di hadapan saya, sebuah pukulan seperti merobek keluar dari pompa menetas inspeksi besi dengan ketebalan sekitar 7 mm. Aliran air yang kuat mulai mengalir dari situ. Membayangkan diri saya sebagai pahlawan kapal selam dan mencoba untuk mendapatkan kembali mata saya, saya mulai dengan panik memutar kait tempel - kingstones. Kami memilikinya di kontrol manual.
Kami memecahkan masalah mogok. Itu adalah serangkaian tindakan. Salah satunya adalah memperlambat siklus buka-tutup. Tapi tetap saja, jika seseorang membanting pintu besi dengan keras, sesuatu di perutnya mencoba jatuh di bawah alas tiang.
Waktunya telah tiba untuk tes menyelam di bawah geladak kapal. Segera setelah air menggenangnya, permukaan air yang besar dan bebas di kompartemen pemberat mulai mempengaruhi. Ini menyebabkan penumpukan. Pada saat itu tidak menakutkan, tetapi sangat tidak menyenangkan. Apa yang dapat menyebabkan:
tautan . Ini adalah pabrik yang berbeda dan unit yang sama dengan kami. Untungnya, tidak ada yang terluka saat itu. Kami memecahkan masalah ini dengan memasang pelampung tambahan dan teknik mengisi kompartemen.
Dan sekarang saatnya untuk pergi!
Untuk melakukan ini, unit diturunkan ke trek - slide. Masing-masing setengah berdiri di dua jalan. Dua silinder hidrolik dipasang di setiap track. Sklizy diolesi dengan tebal.

Tetapi untuk melanjutkannya adalah perlu untuk menyelesaikan masalah sinkronisasi silinder hidrolik. Jarak antara silinder sekitar 100m. Jarak dari stasiun hidrolik ke silinder berbeda. Berat balok berbeda. Gaya gesekan juga dapat berubah karena berbagai alasan. Jika Anda bodoh menghidupkan dan pergi tanpa kendali, maka kami dijamin akan mendapatkan bias dan offset. Anda juga harus ingat bahwa Anda tidak dapat menghidupkan gigi mundur.
Kami memecahkan masalah ini dengan memasang kamera video dan penggaris di masing-masing dari empat trek. Operator slide harus menghidupkan dan mematikan grup silinder untuk mempertahankan nilai yang sama pada penguasa semua track. Kecepatannya cukup nyaman: 1,3 meter (satu langkah) berlalu dalam waktu sekitar 15 menit. Setelah itu, kami memindahkan pemberhentian, mengatur para penguasa dan melanjutkan.

Akhirnya, kami melaju ke tepi pantai. Pada saat ini, katamaran sudah ditambatkan dengan kuat, dan jalan setapaknya yang terhubung dengan jalur di pantai dengan memindahkan tautan.
Penyimpangan liris. Bayangkan Anda ingin naik katamaran seperti itu:

Itu berdiri dengan lancar dan indah. Anda menginjaknya - dan dia tumit. Anda mengubah ke tengah - dan gulungan daun. Namun draf meningkat. Anda bergeser ke sisi lain - dan dia sudah terbalik di sana.
Proses yang sama harus terjadi dengan kami. Hanya skala yang lain dan konsekuensinya. Tugas kami adalah mencegah hal ini. Untuk melakukan ini, kami harus memiliki rancangan tertentu dengan pasokan air di kompartemen pemberat. Pada setiap langkah, kami harus memompa air dari satu rumah dan menuangkannya ke rumah lainnya. Pada langkah tertentu, kebalikannya adalah mengisi yang pertama dan memompa keluar dari yang kedua. Pada saat yang sama, mengikuti roll, trim, posisi sehubungan dengan pantai dan mengoordinasikan semua tindakan dengan tim pantai, yang akan mengunjungi kami.
Teman-teman kami melakukan perhitungan jumlah air di kompartemen untuk setiap langkah. Kami menggunakan perhitungan ini saat meluncur.

Seluruh proses berlanjut terus menerus selama 18 jam dan berakhir dengan bahagia di larut malam.
Kompartemen pemberat catamaran benar-benar dipompa keluar. Dia sendiri dibawa ke tempat lain. Di sana dia berdiri selama satu tahun lagi. Selama ini, pekerjaan dilanjutkan di blok. Setahun kemudian, kami meluncurkannya ke air. Tapi ini cerita selanjutnya.
Setelah transisi katamaran ke tempat baru, kami menemukan fenomena yang tidak dapat dijelaskan (saya harap sejauh ini). Seperti yang saya katakan di atas, sudut tumit dan trim dihitung berdasarkan pembacaan sensor tingkat tempel. Sistem ini bekerja dengan sempurna saat meluncur, serta sensor level lainnya. Tetapi setelah pindah ke tempat baru (300 m di hilir), ketiga sensor tempel dari lambung, yang terletak lebih jauh dari pantai ("lambung batang"), mulai menunjukkan rancangan sekitar 20 cm lebih banyak! Dengan demikian, perangkat elektronik kami mulai menunjukkan hasil! Tetapi perangkat darurat (anjlok konstruksi sederhana) tidak mengkonfirmasi ini! Sensor dan semua elektronik telah diperiksa ulang. Mereka tidak menemukan apa pun. Ada asumsi bahwa ini adalah intrik energi gelap - hidrodinamik. Sensor terletak di bagian datar kapal di haluan, tengah dan buritan. Mereka memiliki katup terpisah yang dilas langsung ke bawah. Di tempat baru, profil yang lebih rata dari dasar sungai, dan badan ini (bagian bawah yang sebagian besar rata) menjulur lebih kuat ke batang. Dan, menurut saya, kecepatan sungai di area gedung ini lebih tinggi. Mungkin ini masalahnya? Saya memiliki asumsi pemalu, yang belum dibantah, tetapi saya tidak ingin menyuarakannya untuk saat ini. Bisakah seseorang dari masyarakat Habrovsk dapat menjelaskan fenomena ini?