
Lelucon untuk kutu buku: jika Anda ingin bertahan hidup di ujung dunia, dimulai dengan robot, tutup saja pintunya. Robot telah berhasil dalam banyak hal - ketepatan, kecepatan, konsistensi - tetapi masih tidak dapat mengatasi gagang pintu, dan hal-hal sederhana lainnya. Sebagian dari masalahnya adalah mereka harus bergerak keliling dunia yang diciptakan untuk manusia dan tangan manusia. Dan tangan adalah salah satu struktur mekanis alam yang paling kompleks.
Namun, segera mobil-mobil itu, tampaknya, akan dapat melakukan ini. Para peneliti dari Universitas Pisa dan Institut Teknologi Italia telah mengembangkan lengan robot yang sangat sederhana dan luar biasa cekatan, yang dikenal sebagai SoftHand 2, berjalan hanya dengan dua motor. Bandingkan dengan Shadow Dexterous Hand, hipnotis cekatan, tetapi ditenagai oleh 20 motor. SoftHand menjanjikan robot bahwa segera semuanya akan disita, apalagi, jauh lebih murah.
Seperti lengan robot lainnya, SoftHand menggunakan tendon dalam bentuk kabel yang mengencangkan jari. Tetapi mereka berada dalam cara yang sama sekali berbeda. Alih-alih sekelompok kabel yang direntangkan ke masing-masing jari, hanya ada satu di tangan, menggeliat di sepanjang set blok yang terletak di masing-masing jari. Dia memiliki sedikit kelincahan, tetapi sangat mengurangi biaya dan konsumsi energi. Dan ini normal - tidak ada teknologi universal tunggal yang cocok untuk semua manipulator robot. Dalam kasus tertentu, pencuri yang lebih canggih akan menemukan aplikasi - seperti SoftHand akan menemukannya.
Untuk membuat tangan, para peneliti pertama kali membuat versi SoftHand yang lebih sederhana dengan hanya satu motor. "Idenya adalah bahwa ketika Anda menghidupkan motor, panjang kabel berkurang, yang menyebabkannya menekan genggaman," kata Robotenik Cosimo Della Santina, yang membantu merancang sistem.
Lepaskan tendon, dan jari-jari akan diluruskan kembali di telapak tangan terbuka, karena elastisitas persendian. Ini bekerja sangat baik ketika, misalnya, Anda harus merebut bola. Tetapi karena jari-jari bergerak serempak, manipulasi tangan yang lebih halus tidak dapat diakses.
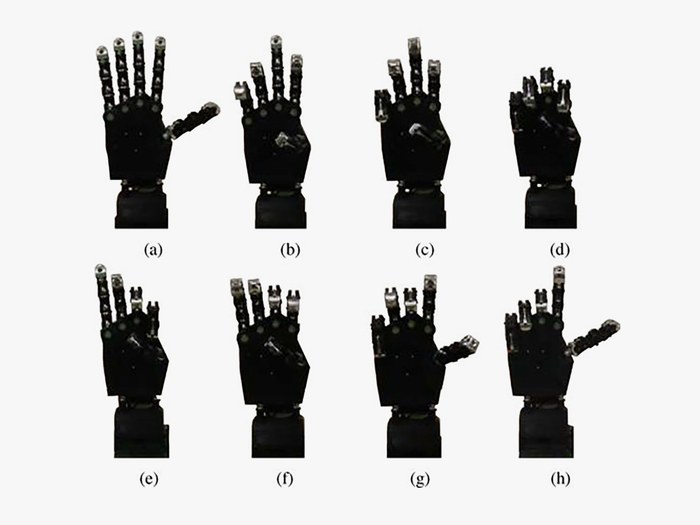
Menambahkan motor kedua secara signifikan meningkatkan ketangkasan SoftHand 2. Lihat gambar di atas. Setiap ujung kabel, masih berkelok-kelok melalui semua jari, terhubung ke salah satu dari dua motor yang terletak di pergelangan tangan. Jika Anda memulai motor dalam satu arah, kabel dipersingkat dan Anda mendapatkan gerakan dari baris atas, A, B, C dan D - dengan prinsip yang sama seperti dengan SoftHand.
Tetapi jika Anda memulai motor di arah yang berbeda, Anda mendapatkan sesuatu yang lebih rumit - E, F, G dan H. Dalam hal ini, satu motor melepaskan kabel, dan yang lainnya memilih. "Ketika kabel bergerak di banyak blok, tegangan kabel tidak tetap konstan," kata Della Santina.
Jika kabel menarik satu motor, tegangan pada ujung terdekat dengan itu akan lebih besar. Jika motor lain melepaskan kabel, ketegangan di ujungnya akan berkurang. Bermain dengan ketegangan dengan cara ini, Anda dapat bekerja dengan SoftHand dengan jumlah kabel yang jauh lebih kecil daripada yang biasanya digunakan dalam lengan robot, dan masih membuat jari Anda bergerak.
Lihatlah animasi di atas dan Anda akan melihat perbedaan yang dihasilkan oleh motor kedua. Di sebelah kiri adalah satu-satunya motor, di sebelah kanan - sudah ada dua. Yang pertama bekerja sepenuhnya, meremas semua jari di sekitar bola. Yang kedua dapat bekerja dengan jari Anda secara selektif, karena perbedaan dalam ketegangan kabel. Prinsip yang sama berlaku dengan penangkapan uang kertas.
Mengingat kehadiran hanya dua motor, SoftHand dapat menggunakan serangkaian manuver yang mengesankan. Dia dapat mengulurkan jari telunjuknya untuk mengayunkan katup, atau menggeser lembaran dari meja. Dia bahkan bisa membuka tutupnya dari kaleng. Dan semua ini relatif murah. Lagi pula, semakin banyak motor, semakin mahal harganya.
"Agar robot dapat belajar dan melakukan segala macam hal keren, kita membutuhkan sistem yang murah, andal, dan canggih," kata insinyur Robotika Lerrel Pinto dari Universitas Carnegie Mellon, yang merancang lengan robot. "Saya pikir tangan mereka menawarkan kompromi yang hebat," tambahnya, tetapi ujian sesungguhnya adalah menemukan penggunaan nyata dari tangan semacam itu. “Apakah bisa digunakan untuk pembelajaran offline? Seberapa andal itu, dapatkah ia menahan ribuan tangkapan? Tidak ada jawaban untuk pertanyaan-pertanyaan ini. "
SoftHand adalah proyek yang menjanjikan, tetapi manipulator robot yang lebih canggih, seperti Shadow Dexterous Hand, masih memiliki sesuatu untuk ditawarkan. SoftHand dapat menangani perilaku stereotip, seperti membuka tutup kaleng, dan Bayangan dengan banyak motornya dapat lebih beradaptasi dengan tugas-tugas kompleks.
Dan SoftHand akan dengan mudah mengatasi salam di tangan.