Intro
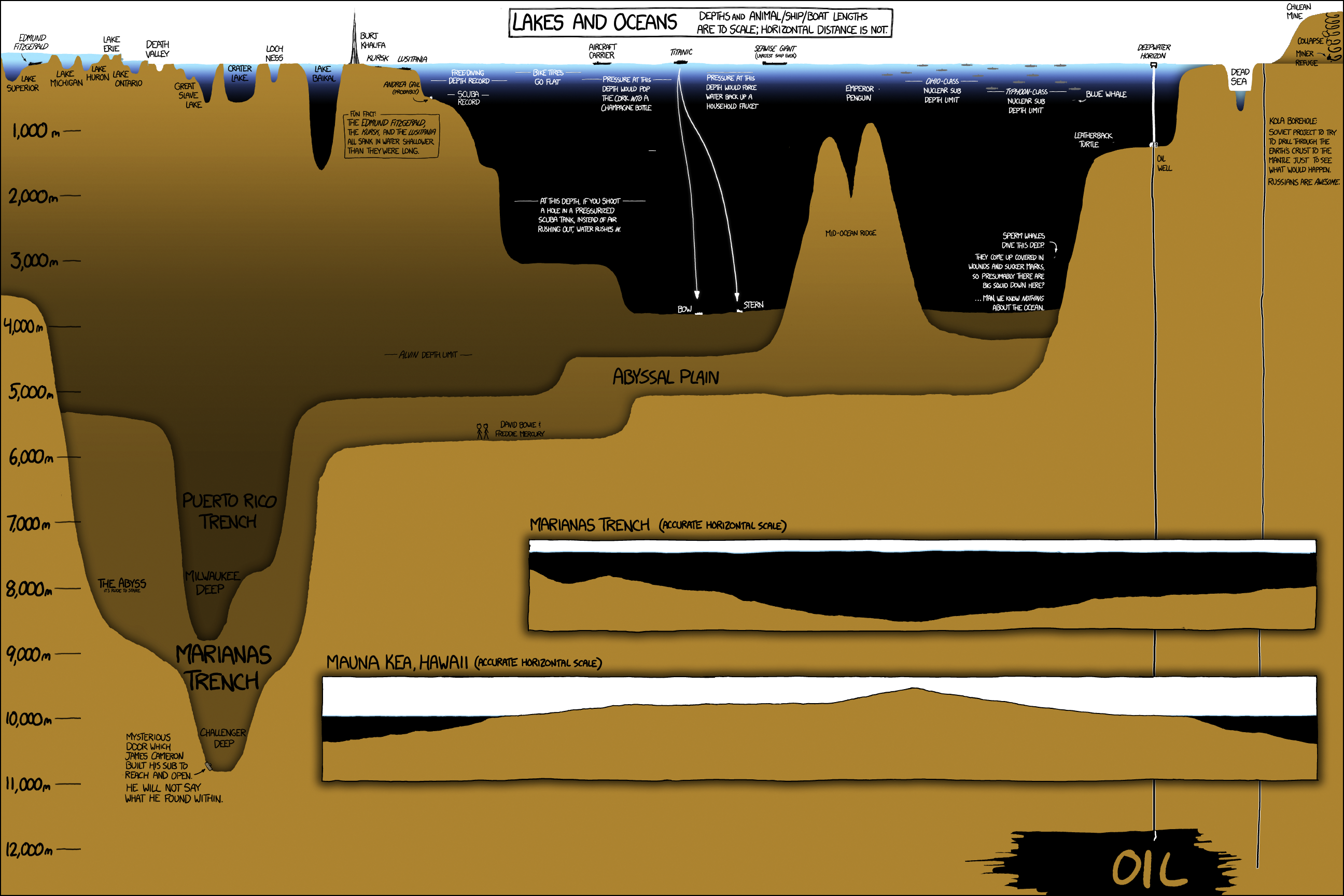
Permukaan planet ini sekitar 71% ditutupi oleh lautan (sekitar 361 juta km²). Wilayah Federasi Rusia adalah sekitar 17 juta km. Kedalaman lautan tidak merata, zona-zona berikut dibedakan:
Rak (rak - rak) - kedalaman hingga 200-500 m;
Kemiringan benua - kedalaman hingga 3500 m;
Dasar lautan - kedalaman hingga 6000 m;
Palung air dalam - kedalaman di bawah 6000 m.
Kedalaman rata-rata juga berbeda:
Atlantik - 3600 m
India - 3890 m
Arktik Arktik - 1225 m
Tenang - 4250 m
Mengapa seorang pria merangkak di bawah air?
Secara historis, pertama untuk makanan (ikan, kerang, arthropoda, ganggang). Kemudian, untuk pekerjaan teknik (konstruksi struktur hidrolik, operasi militer). Baru-baru ini, untuk pembangunan fasilitas linier (jaringan pipa (gas, minyak) dan kabel bawah laut) dan pertambangan (gas, minyak, nodul ferromangan). Bagi manusia, lautan itu berbahaya, tetapi bermanfaat sebagai sumber kebaikan.
Bagaimana manusia menaklukkan kedalaman
Menyelam Diving
Jika penyelam untuk mutiara dan tiram lainnya ada di setiap saat, maka menyelam ke kedalaman yang cukup menjadi mungkin di zaman modern. Dalam keadilan, perlu dicatat catatan kedalaman penyelaman freedivers [1]:
Selam berat konstan dengan menahan nafas:
Pria - 129 m (Alexey Molchanov, 2016-10-28)
Perempuan - 104 m (Alessia Zecchini, 2017-05-10)
UPD:
Pria - 130 m (Alexey Molchanov, 2018-07-18)
Wanita - 107 m (Alessia Zecchini, 2018-07-26)
Dari situs web AIDA .
Tanpa batas:
Pria -
253,2 m (Herbert Nietzsc, 2012-06-06)
UPD:
AIDA tidak termasuk upaya.
Pria -
214 m (Herbert Nietzsc, 2007-06-14)
Dari situs web AIDA .
Wanita -
160 m (Tanya Streeter, 2002-08-17)
Perlu juga dipahami bahwa untuk mencapai hasil seperti itu, orang mencurahkan seluruh hidupnya untuk pelatihan, sementara banyak yang mati dalam upaya memecahkan rekor.
Menggunakan prestasi ilmu pengetahuan dan teknologi untuk bekerja secara mendalam

Mesin Selam Lesbridge
Pada tahun 1715, orang Inggris John Lesbridge membangun kendaraan bawah air, yang sudah menjadi prototipe pakaian keras modern. Seorang pria ditempatkan di sebuah silinder logam dengan penutup. Ada tiga lubang di silinder: dua untuk tangan dan yang ketiga - lubang inspeksi di mana gelas dimasukkan. Menurut uraian, penemu turun ke kedalaman 24 m dan menghabiskan di bawah air hingga 34 menit. Menggunakan mesin untuk meningkatkan nilai setelah kapal karam.
Pakaian selam yang berat
Kita dapat lebih jauh menyoroti tahun 1819, ketika pakaian selam berat pertama kali diperkenalkan oleh Kristian August Sieb, berbagai modifikasi yang masih digunakan sampai sekarang.
Misalnya, mantel tiga baut: perlengkapan selam standar ini telah digunakan di Angkatan Laut Rusia dan armada sipil dari abad ke-19 hingga hari ini. Mereka dilengkapi dengan stasiun penyelaman kapal selam dan raid diving, kapal penyelamat dan kapal tunda. Itu tidak mengisolasi penyelam dari tekanan lingkungan (air). Dilengkapi dengan interkom.
Rekor penyelaman dalam pakaian selam berat yang ditemukan adalah
317 meter [2]. Sebagai bagian dari pengembangan elemen tugas kursus K-2 (pengoperasian satu kapal di laut untuk tujuan yang dimaksudkan), spesialis penyelaman kapal penyelamat Igor Belousov dari Armada Pasifik Angkatan Laut Federasi Rusia untuk pertama kalinya melakukan penurunan eksperimental di lonceng selam hingga kedalaman 317 meter dengan akses ke tanah.
Berdasarkan hasil penurunan eksperimental hingga kedalaman hingga 305 m, ACS Angkatan Laut dan komando Angkatan Laut sampai pada kesimpulan bahwa untuk memastikan keamanan penyelam ketika turun menggunakan metode penyelaman jangka pendek, kedalaman keturunan harus dibatasi hingga 200 m, karena pada kedalaman yang besar penyelam tetap tidak dapat beroperasi secara fisik, dan penyelam penyelam independen tidak dapat beroperasi. dari kapal selam yang tenggelam dengan metode pendakian buoyrp dari kedalaman lebih dari 200 m adalah tidak mungkin [3].
Sekali lagi, kedalaman tersebut tersedia setelah pelatihan ekstensif dan penggunaan ruang bertekanan untuk dekompresi.
Aparatus Henry Fluss
Selanjutnya, Anda dapat menyoroti aparatus Henry Fluss dari paten tahun 1878, yang dapat disebut SCUBA.
Perlengkapan scuba
Pada tahun 1945, Jacques-Yves Cousteau bersama dengan perlengkapan selam paten Emil Gagnan. Peralatan selam sekarang digunakan oleh sebagian besar penggemar selam, penyelam profesional dan penjaga pantai.
Perlengkapan selam: 1 - Selang, 2 - Corong; 3 - Katup (gearbox); 4 - Tali bahu; 5 - perisai belakang; 6 - Tangki (botol gas)
Catatan scuba diving saat ini milik Ahmed Gabr. Ia berhasil mencapai
332,4 meter di bawah permukaan air Laut Merah di dekat kota Dahab. Seluruh penyelaman membutuhkan waktu 14 jam (pendakian kemungkinan besar berlangsung setidaknya 10 jam).
Dan sekali lagi, catatan seperti itu membutuhkan persiapan yang panjang, ruang penekan dan tim pendukung yang besar.
Berapa kedalaman maksimum yang bisa dijatuhkan seseorang, mengalami efek tekanan pada kolom air pada kedalaman ini?COMEX
534 m di perairan terbuka 1988, Marseille, Prancis [4], menggunakan campuran pernafasan COMEX Hydra 8 (49% hidrogen, 50% helium, 1% oksigen) untuk total 6 orang (4 penyelam COMEX, 2 dari Angkatan Laut Prancis). Pada 8 hari pertama di ruang tekanan, peningkatan tekanan secara bertahap menjadi 53 atmosfer. Selanjutnya, semua penyelam bekerja di kedalaman dari 520 m hingga 534 m. Setelah latihan dilakukan untuk menghubungkan pipa. Setelah memenuhi tugas yang direncanakan, penyelam menjalani dekompresi di ruang tekanan selama 18 hari.
701 m di ruang tekanan eksperimental 1992, Marseille, Prancis [5]. Log Eksperimen:
- Periode persiapan 4 minggu sebelum "menyelam"
- Insulasi dua hari pada kedalaman 10 m
- 13 hari untuk mencapai tekanan yang sesuai dengan kedalaman 675 m menggunakan campuran pernapasan COMEX Hydra 8 (49% hidrogen, 50% helium, 1% oksigen).
- 3 hari dalam tekanan antara 650 m dan 675 m
- Kemudian salah satu penyelam, Theo Mavrostomos, pergi ke ruang tekanan terpisah dan terus menyelam ke kedalaman 701 m menggunakan campuran pernafasan COMEX Hydro 10, di mana ia bertahan selama 7 jam.
- Kemudian 24 hari dekompresi.
- Dan 2,5 bulan pengamatan para peserta dalam percobaan.
Ternyata, tekanan pada kedalaman lebih dari 700 meter menggunakan campuran gas untuk bernafas sangat ekstrem.
Ada penelitian tentang teknologi pernapasan cair. Untuk ini, perfluorocarbon cair dengan oksigen dan karbon dioksida yang dilarutkan di dalamnya digunakan dalam percobaan. Pada tanggal publikasi, percobaan sedang dilakukan pada hewan laboratorium.
Di sini perlu diingat kedalaman rata-rata lautan dari 1250 m hingga 4250 m.
Pakaian Selam yang Kaku
Cabang berikutnya untuk menaklukkan kedalaman adalah penciptaan kostum yang mempertahankan tekanan atmosfer normal bagi seseorang dan melindungi terhadap tekanan lingkungan.
Menurut GOST R 52119-2003: Pakaian selam yang kaku dirancang untuk pengamatan bawah laut dan operasi selam oleh operator di bawah tekanan internal normal (teknik Selam. Syarat dan definisi).
Peralatan yang ditujukan untuk operasi laut dalam (hingga 600 meter), di mana tekanan atmosfer normal bekerja pada penyelam, yang menghilangkan masalah dekompresi dan menghilangkan nitrogen, oksigen, dan keracunan lainnya. Secara historis, produk-produk berikut dapat dibedakan:
Pakaian selam saudara Karmagnol
Pakaian selam dengan 20 lubang intip kecil Alphonse dan Theodore Carmagnol, Marseille, Prancis, 1878. Baju ruang angkasa seharusnya mampu membenamkan seseorang dengan aman hingga kedalaman 60 m. Namun, ia tidak pernah bekerja sebagaimana mestinya dan terus bocor. Sekarang terletak di Museum Angkatan Laut Prancis.
Kostum "Neufeld dan Kunke"
Tiga generasi pakaian selam oleh perusahaan Jerman Neufeld dan Kunke, 1917-1940.
Setelan generasi ketiga (dibuat antara 1929 dan 1940) memungkinkan Anda untuk menyelam hingga kedalaman 160 meter dan dilengkapi dengan telepon bawaan. Pengembangan perusahaan "Neufeld dan Kunke" membentuk dasar dari pakaian luar angkasa yang kaku dari Roberto Galeazzi Italia pada awal 30-an abad lalu, termasuk adopsi armada militer dari negara Soviet yang baru dibentuk.
Sub 1-Man
1933, Kapal selam mini untuk satu orang. Setelan ini memungkinkan penyelam bekerja untuk waktu yang cukup lama di kedalaman 300 meter tanpa proses dekompresi yang lama.
Jas Jum
JIM suit 1974, Hard suit. Pakaian antariksa itu digunakan pada tahun 70-an abad terakhir di industri minyak. Pada 1979, seorang penyelam wanita, Sylvia Earle, mencetak rekor dunia dalam pakaian antariksa ini. Dia turun 381 meter dan berjalan di sepanjang dasar laut selama dua setengah jam.
Newtsuit
1985, pengembangan dipimpin oleh Phil Newten. Diuji hingga kedalaman 900 m, disertifikasi hingga kedalaman 300 m.
Exosuit
Exosuit adalah setelan dua meter 240 kilogram yang terbuat dari paduan aluminium, yang memungkinkan seseorang bekerja pada kedalaman hingga 305 meter. Untuk meningkatkan mobilitas dan membantu tangan dan kaki manusia yang lemah, Exosuit dilengkapi dengan 4 mesin propulsi 1,6-hp. (dengan kemungkinan meningkat menjadi 8), serta 18 sendi yang memberikan mobilitas tangan. "Selongsong" pakaian antariksa dapat dilengkapi dengan berbagai nozel yang dapat dipertukarkan: gripper, cutter, drill, dll.
Ciri Exosuit adalah penopang hidupnya yang sepenuhnya otonom, sementara oksigen dan listrik dipasok dari sebagian besar kapal ke sebagian besar antariksa bawah laut yang serupa. Exosuit memiliki sistem pemulihan oksigen yang membersihkan udara dari karbon dioksida dan mengisinya dengan oksigen. Sistem memiliki otonomi 50 jam. Di Exosuit, seseorang menghirup udara atmosfer normal di bawah tekanan normal, yang menghilangkan risiko yang tidak perlu dan prosedur dekompresi yang lama. Exosuit bernilai $ 1,3 juta.
Atmospheric Diving System (ADS 2000)
ADS 2000 dikembangkan bersama dengan OceanWorks International dan Angkatan Laut AS pada tahun 1997 untuk memenuhi persyaratan Angkatan Laut AS. T6061 forged aluminium alloy housing, desain putar canggih. Mampu bekerja pada kedalaman 610 m selama 6 jam, ia memiliki sistem pendukung kehidupan otomatis yang otonom. Sistem kemudi ganda terintegrasi memungkinkan pilot untuk dengan mudah bernavigasi di dalam air. Itu disertifikasi oleh Angkatan Laut AS pada 1 Agustus 2006, ketika Kepala Angkatan Laut Diver Daniel Jackson jatuh ke kedalaman 2.000 kaki (610 m).
Bahkan dengan penggunaan pakaian antariksa, seseorang dapat menyelam hingga kedalaman 610 m.
Tapi bagaimana dengan kapal selam?
Kapal selam modern memungkinkan Anda untuk menyelam hingga kedalaman sekitar 600-650 m.
 Diklik
DiklikKapal selam nuklir Komsomolets Soviet tetap menjadi pemegang rekor absolut untuk penyelaman maksimum, pada 1985 kapal selam itu mencapai kedalaman 1027 meter di bawah permukaan laut. Nilai kerja untuk itu adalah 1000 m, dan nilai estimasi adalah 1250 m. Nasib kapal selam kemudian berkembang secara tragis. Komsomolets tenggelam pada 1989 karena kebakaran hebat yang dimulai pada kedalaman sekitar 300 meter. Dan meskipun dia, tidak seperti Thresher yang sama, berhasil muncul, cerita itu ternyata sangat tragis.
Bathyscaphes dikembangkan untuk membenamkan orang ke kedalaman lebih dari 600 meter.
Bathyscaphe
FNRS-2 dan FNRS-3
FNRS-2 adalah pemandian pertama yang dibuat oleh Auguste Piccard, Swiss. Bekerja pada penciptaan bathyscaphe dimulai pada tahun 1937 dan terganggu oleh Perang Dunia II. Bathyscaphe selesai pada tahun 1948. Dinamai setelah Yayasan Belgia untuk Penelitian Nasional (Fonds National de la Recherche Scientifique).
Pembangunan aktual FNRS-2 dilakukan pada tahun 1946-1948. Bathyscaphe rusak selama uji coba laut pada tahun 1948 dekat pulau-pulau Cape Verde.
Untuk pengujian di laut lepas, pemandian FNRS-2 berangkat dengan kapal Belgia, Scaldis 3.500 ton. Namun, Scaldis tidak cukup kuat untuk menarik FNRS-2 keluar dari air dengan tangki apung berisi gas. Tes selam tanpa awak di ketinggian 1.400 m berhasil diselesaikan, tetapi karena masalah teknis, tidak mungkin untuk mengosongkan tangki pelampung dari bensin. Diputuskan untuk menarik FNRS-2 kembali ke pelabuhan, tetapi pemandian dipukuli oleh ombak di sisi kapal dan terjadi kebocoran gas dari tangki apung. Setelah mendeteksi kebocoran, bensin dikeringkan ke laut, dan FNRS-2 diangkat ke atas. Tes lebih lanjut dibatasi karena kurangnya dana untuk perbaikan.
Setelah penghentian pendanaan pada tahun 1948, FNRS-2 dijual ke Angkatan Laut Prancis. Spesialis Prancis memperbaiki FNRS-2 dan mengganti nama FNRS-3. Pada bulan Februari 1954, FNRS-3 mencapai kedalaman 4.050 meter di Atlantik, 160 mil dari Dakar, rekor Picard sebelumnya adalah 3150 meter pada tahun 1953.
Trieste
Dirancang di Swiss, dibangun di Italia, pemandian air penelitian yang dihuni laut dalam. Dirancang oleh Auguste Piccard. Trieste diluncurkan ke Laut Mediterania pada 26 Agustus 1953 di dekat pulau Capri. Proyek ini didasarkan pada pengalaman sebelumnya menggunakan bathyscaphe FNRS-2. Trieste diperintah oleh armada Prancis. Setelah beberapa tahun beroperasi di Mediterania, Trieste dibeli pada 1958 oleh Angkatan Laut Amerika Serikat seharga $ 250.000. Awalnya, area kru dirancang untuk perendaman hingga 4000 m, tetapi Angkatan Laut AS memerintahkan Krupp untuk membuat bola yang mampu menahan perendaman pada 11000 m.
Selama pelaksanaan proyek Necton, pada tanggal 23 Januari 1960, Jacques Picard dan letnan Angkatan Laut AS Don Walsh menyelam ke kedalaman 10.919 m. Dengan demikian, untuk pertama kalinya mereka berhasil menaklukkan Jurang Penantang di Palung Mariana.
Archimède
Pengembangan bathyscaphe dengan nama sementara B11000 (Bathyscaphe 11.000 meter) dimulai pada tahun 1957 di gudang senjata Toulon. Pendanaan disediakan oleh Pusat Penelitian Ilmiah Nasional Perancis (CNRS) dan Yayasan Riset Nasional Belgia (FNRS). Proyek ini dipimpin oleh Pierre Wilm, kapten FNRS-3 Georges Wo mengambil bagian penting dalam desain. "Archimedes" dimaksudkan untuk tenggelam ke dasar Palung Mariana, tetapi bathyscaphe "Trieste" ada di depan "Archimedes"
Shinkai
Shinkai adalah kendaraan bawah air yang dihuni, kedalaman perendaman hingga 600 m. Diluncurkan pada tahun 1970, hingga 1981 memiliki kedalaman perendaman terbesar di antara kapal-kapal Jepang. Dimiliki dan dikelola oleh Penjaga Pantai Jepang.
Shinkai 2000 - 1981 tahun konstruksi. Kedalaman tertinggi 2000 m.
Shinkai 6500 - 1990 tahun konstruksi. Kedalaman maksimum adalah 6500m.
Cari 6
Kapal selam laut terdalam yang dapat dihuni sendiri di bathyscaphe tipe AS-7 "Search-6" dari proyek 1906 dirancang oleh Rubin LMBP dan SPMBM Malachite dan dibangun di Pabrik Novo-Admiralteysky di Leningrad pada 1975-1979. Pengujian perangkat dilakukan di Laut Hitam dan Samudra Pasifik, sementara kedalaman perendaman 6.000 meter telah terlampaui. Pengujian aparatur mengungkapkan cacat desainnya yang signifikan dan disertai dengan kegagalan peralatan berulang. Akibatnya, pada bulan September 1987, komite seleksi negara, dengan mempertimbangkan penuaan fisik dan moral aparat AS-7, tidak menerimanya sebagai bagian dari Angkatan Laut Uni Soviet dan mengakui pekerjaan lebih lanjut sebagai tidak pantas.
Mir-1 dan Mir-2
Mungkin pemandian bawah air paling terkenal.

Mir-1 dan Mir-2 adalah dua wahana penelitian yang dihuni laut dalam Soviet dan Rusia untuk penelitian kelautan dan operasi penyelamatan. Gagasan utama pada desain aparatur, pengaturan sistem individual, komponen, elemen, pada akuisisi peralatan ilmiah dan navigasi milik I. E. Mikhaltsev, wakilnya A. M. Sagalevich dan chief project engineer dari perusahaan pembuat kapal Finlandia Sauli Ruohonen, yang memimpin kelompok insinyur Finlandia dan teknisi yang berpartisipasi dalam pembangunan aparatur. Kendaraan laut dalam diproduksi pada 1987 oleh perusahaan Finlandia Rauma-Repola Oceanics, dan kontrak untuk pembuatan kendaraan ditandatangani pada 16 Mei 1985, dan sertifikat penerimaan ditandatangani pada 17 Desember 1987, setelah penyelaman uji yang sukses di Teluk Bothnia dan Samudra Atlantik hingga kedalaman maksimum. 6170 meter (Mir-1) dan ke kedalaman 6120 meter (Mir-2). Yang sangat penting bagi penelitian ilmiah adalah kedalaman kerja "Dunia" - 6.000 meter, sehingga perangkat ini dapat mencapai kedalaman di mana 98,5% dari dasar lautan berada. Biaya pembuatan setiap perangkat pada tahun 1987 berjumlah 100 juta mark Finlandia (17 juta euro).
Jiaolong
Jiaolong adalah kendaraan yang didiami laut dalam yang tidak dapat dilalui di Tiongkok. Selama periode dari 31 Mei hingga 18 Juli 2010, ia melakukan 17 kali penyelaman di Laut Cina Selatan, yang merupakan yang terdalam - ke kedalaman 6759 meter. Acara ini menjadikan Tiongkok sebagai negara kelima setelah Amerika Serikat, Prancis, Rusia, dan Jepang, yang memiliki teknologi modern untuk menyelam hingga kedalaman lebih dari 6.500 meter.
Penantang Deepsea
Deepsea Challenger (DCV 1) adalah tempat pemandian tempat, pada tanggal 26 Maret 2012, sutradara Kanada James Cameron membenamkan dirinya dalam Challenger Abyss (Mariana Trench). Kapal selam ini dibangun di Sydney, Australia, oleh Acheron Project Pty Ltd., sebuah perusahaan penelitian dan pengembangan. dan berisi peralatan ilmiah dan kamera 3D resolusi tinggi. Deepsea Challenger diam-diam dibangun di Australia, bekerja sama dengan National Geographic dan didukung oleh Rolex. Institut Oseanografi Scripps, Jet Propulsion Laboratory dan Universitas Hawaii membantu dalam pembangunan bathyscaphe dan pelaksanaan misi. Insinyur konstruksi adalah insinyur Australia Ron Allum. Perkiraan biaya perangkat adalah 7 juta dolar.
Di bathyscaphe, seseorang dapat menyelam ke kedalaman apa pun di lautan dan bahkan melakukan manipulasi di atas air dan menaikkan sesuatu, tetapi biaya bathyscaphe itu sendiri dan perawatannya cukup tinggi.
Memanfaatkan kekuatan lautan.
Gambar tersebut secara singkat menunjukkan area kerja utama di lautan, tidak termasuk operasi pencarian dan penyelamatan:- menumbuhkan dan memanen makanan laut (ikan, kerang, artropoda, alga);
- produksi dan transportasi hidrokarbon (minyak, gas, gas hidrat);
- penambangan dan pengangkutan bijih dari nodul ferromangan;
- penguburan limbah berbahaya;
- konstruksi dan perbaikan struktur linier (kabel serat optik bawah laut, kabel listrik bawah air, jaringan pipa);
- mencari objek di bawah air dan pemetaan.
Konstruksi dan perbaikan struktur linear
Perusahaan listrik Spanyol Red Eléctrica de España telah menerapkan sistem transmisi daya arus searah (HVDC) tegangan tinggi yang menghubungkan pulau Mallorca dengan sistem energi terpadu di Spanyol kontinental.Sistem 244-kilometer dari saluran listrik arus searah tegangan tinggi menghubungkan daerah Morvedre (dekat Valencia) dengan desa Santa Ponsa, yang terletak di sebelah ibu kota Mallorca - Palma de Mallorca. Tenaga listrik 400 MW ditransmisikan melalui kabel yang berjalan di sepanjang dasar laut, kerugian untuk transmisi arus searah minimal: 250 kW.Seperti dapat dilihat pada gambar, ketika bekerja di kedalaman, mekanisme khusus digunakan. Untuk peletakan kabel, digunakan alat capjet khusus [6], peletakan dikontrol oleh kendaraan bawah air yang dikendalikan dari jarak jauh yang tidak berpenghuni (ROV).Sekitar yang sama, ada peletakan kabel komunikasi:Operasi untuk mengangkat pesawat tempur F14 Tomcat dari kedalaman 1.140 m di dekat pantai Meksiko. Selama operasi, kendaraan bawah laut yang dikendalikan dari jarak jauh digunakan.Membersihkan dasar kejutan perang selama pembangunan aliran utara:Produksi minyak lepas pantai:Kira-kira juga, dengan bantuan perangkat-perangkat telecontrolled, bidang Shtokman sedang dikembangkan.Jadi perangkat terlihat hidup:Jadi mereka mengendalikannya:Dan inilah yang dilihat operator pada saat bersamaan:Perangkat Telecontrolled (ROV) diproduksi di kelas yang berbeda dengan kedalaman pencelupan yang berbeda. Ada yang bisa diturunkan hingga 4000 m, ada yang tidak boleh lebih dari 300 m, biayanya juga berbeda berdasarkan pesanan besarnya. Jika perangkat yang cocok untuk bekerja pada kedalaman besar berharga dari $ 1 juta, maka perangkat yang beroperasi pada kedalaman hingga 300 m membutuhkan biaya puluhan ribu dolar dalam desain industri.Selain kendaraan yang dikendalikan dari jarak jauh, kendaraan bawah air otonom tak berpenghuni (AUV) juga digunakan. Mereka terutama digunakan untuk operasi pencarian, sampai Juli 2018, dari 2014 di Samudra Hindia, pesawat yang hilang dari maskapai Malaysia dicari dengan bantuan perangkat tersebut.Kendaraan bawah air otonom digunakan untuk memantau status struktur linear bawah laut (pipa, saluran kabel), untuk memetakan permukaan bawah dan melakukan penelitian pada area yang luas. Sebagian besar perangkat otonom dibuat dalam bentuk torpedo untuk mengurangi resistansi frontal air dan dengan demikian meningkatkan durasi kerja di bawah air dengan sekali pengisian baterai.
Penambangan nodul ferromangan
Nodul ferromangan adalah penyempitan mineral autigenik dari besi dan hidroksida mangan, serta unsur-unsur lain di dasar danau, laut, dan lautan. Yang paling banyak didistribusikan di wilayah pelagis samudera. Pertama kali dipelajari oleh ekspedisi Inggris di kapal Challenger pada tahun 1872-76. Informasi terperinci tentang nodul ferromangan (distribusi spasial, fasies formasi, petrografi, mineralogi, dan geokimia) diperoleh sebagai hasil studi dari dasar lautan yang dilakukan oleh para peneliti dari berbagai negara (Inggris, CCCP, AS, Jerman, Jepang, dll.) Selama Tahun Geofisika Internasional (1957-1958) dan tahun-tahun berikutnya.
Perkiraan cadangan dari tiga samudera adalah 200 miliar ton, Samudra Atlantik berisi 45 miliar ton, Pasifik - 112 miliar ton, Samudera India - 41 miliar ton, Deposito yang terjadi pada kedalaman yang relatif dangkal dan merupakan varietas khas dari simpanan mangan yang ditemukan pada kedalaman hingga 400 meter di lepas pantai Bahia, California dan Jepang. Nodul di lepas pantai Jepang terletak di kedalaman 100 hingga 360 meter di lapisan dasar laut di sepanjang kepulauan Auzu dekat Tokyo.
Nautilus Minerals Ltd. membangun kapal khusus untuk memproses bijih yang diangkat dari dasar laut [7].
Nodul ferromangan dari Samudera Dunia rata-rata mengandung komponen bijih berikut (%): Na 1,9409; Mg 1.8234; Al 2.82; Si 8.624; P 0.2244; K 0,6427; Ca 2,47; Ti 0,647; V 0,0558; Cr 0,0035; Mn 16.02; Fe 15.55; Ni 0.480; Co 0,284; Cu 0,259; Zn 0,078; Sr 0,0825; Zr 0,0648; Mo 0,0412; Tl 0,0129; Pb 0,0900. Kehadiran Ag, Ir, B, Cd, Yb, W, Bi, Y, Hg dan elemen lainnya yang konsentrasinya secara signifikan lebih tinggi dari nilai rata-rata kerak bumi adalah karakteristik. Menurut isi rata-rata komponen bijih utama (Ni, Cu, Co, Mn), nodul ferromangan dalam masing-masing daerah yang dipelajari sebanding dengan bijih endapan yang dikembangkan di benua.
Di permukaan, bijih terlihat seperti ini:
Segera mereka berjanji untuk membangun produksi industri.
Bunga
Secara umum, kendaraan bawah laut atau robot sejak 2015 dianggap sebagai robot terdepan baru (The Next Big Drone Frontier) [8].
Pasar UUV diproyeksikan mencapai $ 5,20 miliar pada tahun 2022, dengan CAGR 14,07% dari 2017 hingga 2022. Pertumbuhan pasar dapat dijelaskan dengan peningkatan jumlah produksi minyak dan gas lepas pantai laut dalam dan peningkatan ancaman terhadap keamanan maritim.
Secara umum, minat pada robotika bawah air cukup tinggi di AS, Cina, Uni Eropa, dan Singapura.
Penelitian paten mengkonfirmasi hal ini.
Geografi negara yang mendaftarkan paten di bidang robotika bawah air:
Distribusi berdasarkan jumlah aplikasi yang diajukan:
Dapat dilihat bahwa Cina sekarang telah masuk ke tempat pertama dan dalam beberapa tahun kita akan melihat perkembangan dalam besi dan lebih lanjut dalam pertumbuhan indikator ekonomi.
Segmentasi teknologi yang digunakan di bidang ini:
Daftar produsen robotika bawah air .
Secara alami, pekerjaan sedang dilakukan dengan siswa dan anak sekolah. Memang, dalam beberapa tahun ke depan semua perkembangan ini akan masuk ke industri dan spesialis akan diminta untuk bekerja dengan kendaraan bawah laut yang sedang dibuat.
Indikator ketersediaan pekerjaan tersebut adalah adanya kompetisi dalam robotika bawah air:
- Kompetisi ROV Internasional MATE (setiap tahun sejak 2002)
- Kompetisi RoboSub AUVSI (setiap tahun sejak 1997)
- Tantangan AUV Singapura (tahunan sejak 2013)
- Student Autonomous Underwater Challenge-Europe (SAUC-E) (setiap tahun sejak 2006)
Kompetisi ROV Internasional MATE
Persaingan paling masif. Di Amerika Serikat, sekitar 600 lembaga pendidikan menyatakan partisipasi dalam babak kualifikasi. Mereka dibagi ke dalam kompetisi sekolah dan siswa di berbagai kelas:
- Penjelajah - pelajar
- Ranger - siswa sekolah menengah;
- Navigator - sekolah menengah atas;
- Scout - siswa sekolah dasar.
Tim-tim dari Vladivostok berhasil melakukan:
Tim Rusia di kompetisi internasional robotika bawah air (2009)Tim ROV DVFU 2010Tim Rusia menjadi juara dunia dua kali dalam robotika bawah air (2012)Tahun 2013Pusat Pengembangan Robotika Anak Sekolah (2015)Pusat Pengembangan Robotika murid dan siswa (2018)ROBOSUB
Kompetisi paling bergengsi bagi siswa. Disponsori oleh Yayasan UAV dan Kantor Penelitian Angkatan Laut. Tim siswa dari seluruh dunia berpartisipasi. Pada tahun 2018, Cina menang dari Universitas Teknik Harbin, tempat kedua di Universitas Nasional Singapura. Berhasil melakukan mahasiswa FEFU dan Universitas Negeri Moskow. Nevelsky.
Pengintaian RoboSub 2012 dalam pertempuran dan mencapai finalTantangan AUV Singapura
Persaingan dalam kendaraan bawah air otonom. Siswa dari negara-negara Asia-Pasifik berpartisipasi. Berhasil melakukan siswa FEFU.
Tantangan Bawah Air Otonom Pelajar-Eropa
Sayangnya, saya tidak tahu para peserta dari Rusia.
Apa yang kita milikiKami masih jauh dari 600+ tim, seperti di AS, tetapi ada juga minat:
- MATE ROV Competition Vladivostok (babak kualifikasi untuk MATE besar, sejak 2015);
- VRO Waterborne IRS (di Innopolis sejak 2016);
- Profil air Olimpiade NTI (sejak 2017);
- Kompetisi All-Rusia pertama dalam robotika bawah air Vladivostok 2018 (Agustus-September 2018);
- Kompetisi robotika bawah air pertama untuk siswa di kelas 1-4 (2018-2019).
MATE ROV Competition Vladivostok
Diadakan di Vladivostok atas dasar lembah Universitas Negeri Moskow. Nevelsky.
Pendaftaran dari Desember hingga Maret .
Deskripsi di
sini .
Berita di
sini dan di
sini .
Video di
sini .





IRS Air VRO
Mereka ditahan sebagai bagian dari final
Olimpiade Robotika Seluruh Rusia di Innopolis pada akhir Juni. Untuk 2019, belum diketahui apakah Innopolis akan mengadakan final BPO.
Pendaftaran dibuka pada musim semi .
Profil air Olimpiade NTI
Pendaftaran sudah dimulaiKompetisi All-Rusia pertama dalam robotika bawah air Vladivostok 2018 (Aquareobototech 2018)
Sudah pergi. Anda dapat membacanya di
sini dan di
sini .
Lihat di
siniKompetisi pertama dalam robotika bawah air untuk siswa di kelas 1-4
Aturan persaingan di
sini .
Pendaftaran berakhir pada 30 September .
Tawarkan
Kami dapat menawarkan set berikut untuk robotika bawah air:
- Micro Underwater Robot ( MUR ) - Satu set yang direkomendasikan untuk NTI dan VRO.
- Kit Perakitan Robot Telecontrol MiddleROV dari MUR
- Kit perakitan robot telecontrol MUR ElementaryROV
- MUR HighROV - untuk partisipasi dalam MATE (sesuai pesanan)
Informasi lebih lanjut di
situs web Pusat Robotika