Pengeboran papan sirkuit cetak adalah sakit kepala nyata bagi seorang insinyur elektronik, tetapi perangkat baru kami akan sedikit membantu melembutkannya. Penambahan bor mini yang simpel dan ringkas ini akan memperpanjang umur engine dan bor. Skema, papan, instruksi pengaturan, video - semuanya ada di artikel!
Untuk apa kontrol kecepatan?
Biasanya minidrills dibangun berdasarkan motor DC konvensional. Dan kecepatan mesin seperti itu tergantung pada beban dan tegangan yang diberikan. Akibatnya, pada saat idle, mesin berputar sangat kuat, dan pada waktu pengeboran, kecepatan mesin melayang dalam jangkauan yang luas.
Jika Anda mengurangi tegangan pada mesin saat tidak ada beban di atasnya, Anda dapat mencapai peningkatan sumber daya baik bor maupun mesin itu sendiri. Selain itu, akurasi pengeboran pun ditingkatkan. Cara termudah untuk mencapai ini adalah dengan mengukur arus yang dikonsumsi oleh motor.
Ada banyak sirkuit regulator seperti itu di Internet, tetapi kebanyakan dari mereka menggunakan regulator tegangan linier. Mereka besar dan membutuhkan pendinginan. Bekerja sama dengan
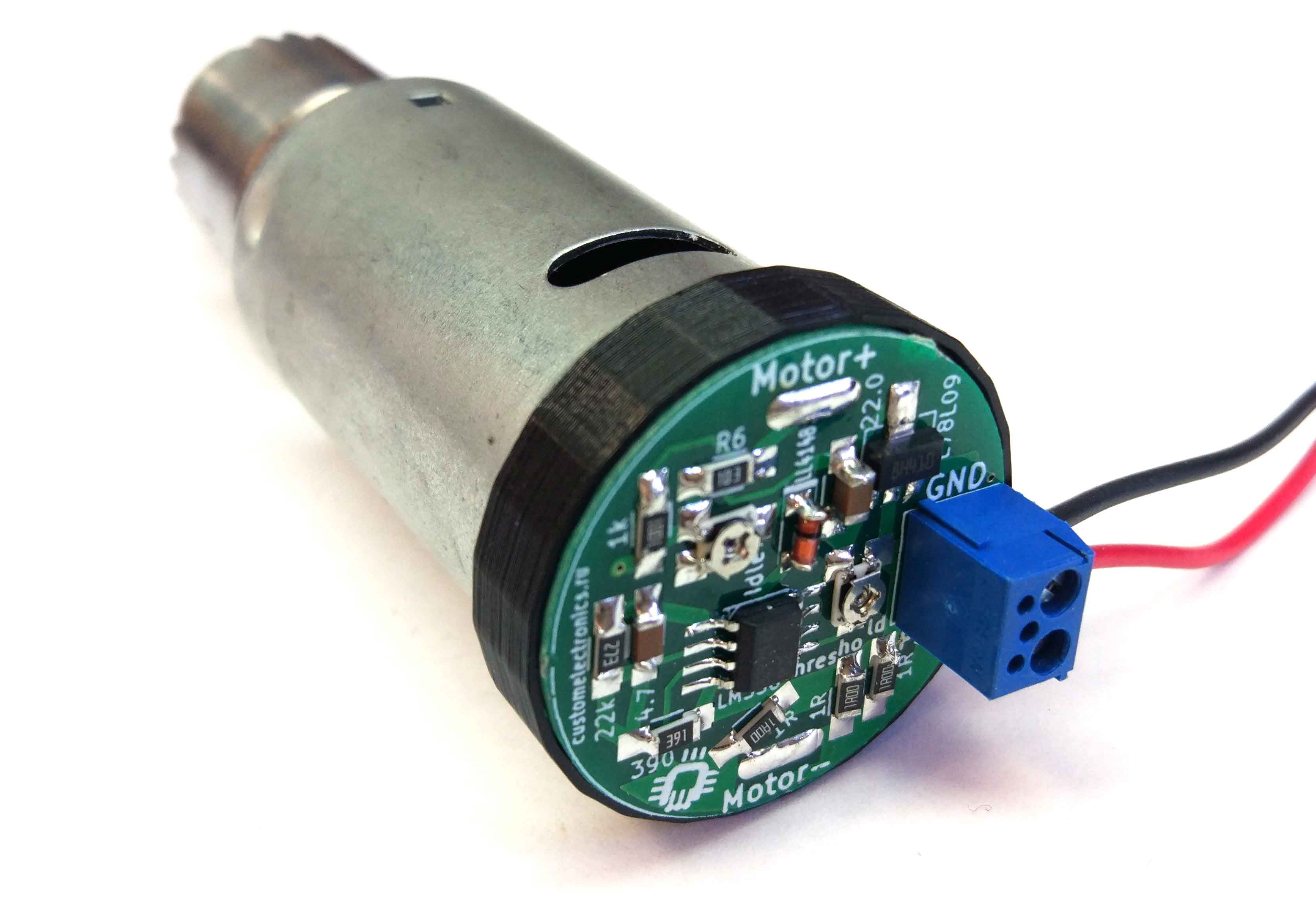
TinyElectronicFriends, kami ingin membuat papan kompak berdasarkan pada penstabil denyut sehingga hanya bisa "dikenakan" pada mesin.
Skema
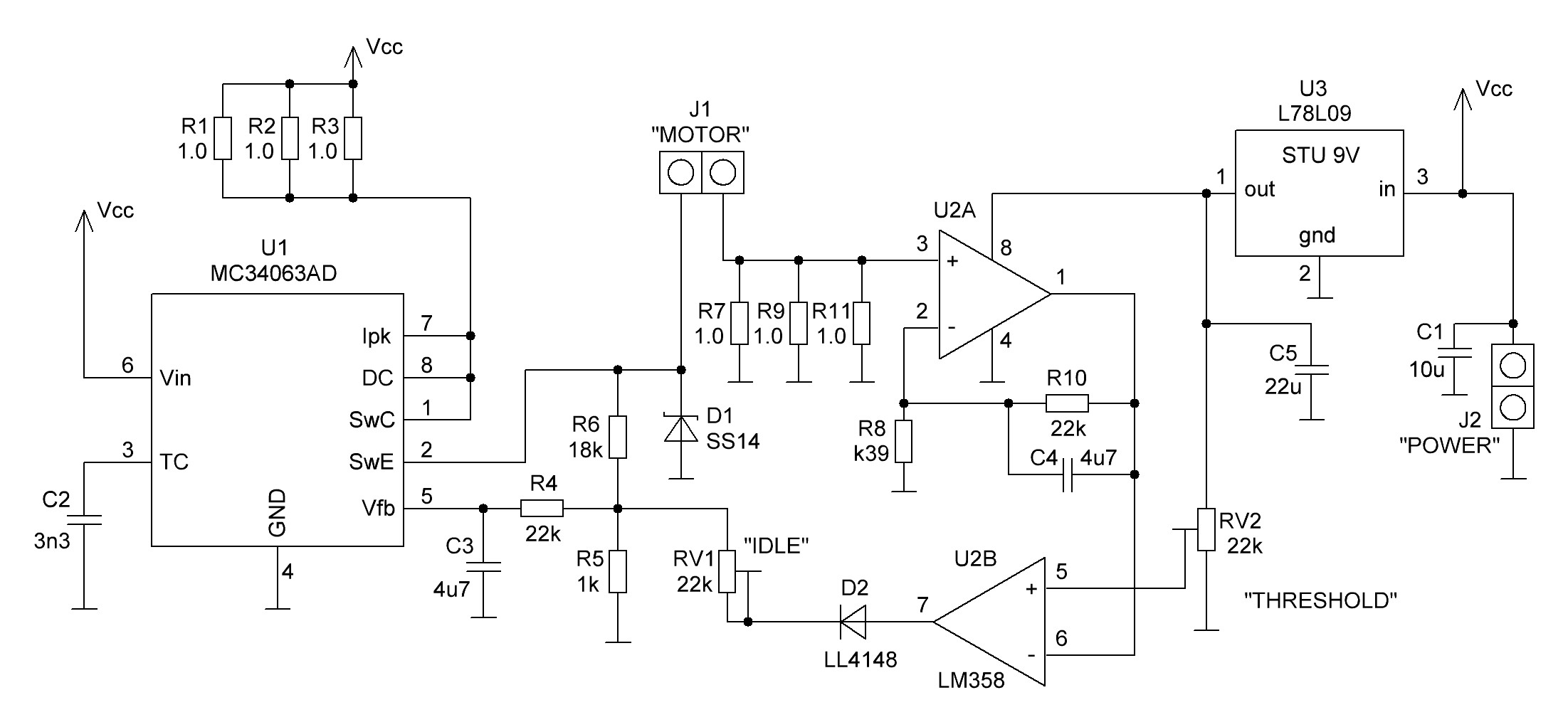
Pengontrol PWM dengan kunci terintegrasi MC34063 mengatur tegangan pada motor. Tegangan pada shunt R7, R9, R11 diperkuat oleh penguat operasional dan diumpankan melalui komparator ke input umpan balik dari pengontrol PWM.
Jika arus kurang dari nilai tertentu, maka tegangan diberikan ke motor, tergantung pada pengaturan resistansi RV1. Artinya, saat idle, hanya sebagian daya yang akan disuplai ke mesin, dan tuning resistor RV1 akan memungkinkan Anda untuk menyesuaikan kecepatan pada saat yang bersamaan.
Jika sinyal pada output op-amp melebihi tegangan pada komparator, maka tegangan penuh akan diterapkan ke motor. Artinya, saat pengeboran, mesin akan menyala pada daya maksimum. Ambang switching diatur oleh resistor RV2.
Stabilizer linier digunakan untuk menyalakan op-amp.
Semua komponen rangkaian akan menghilangkan sedikit panas dan Anda dapat mengumpulkannya sepenuhnya pada komponen SMD. Ini dapat bekerja dengan berbagai tegangan suplai (tergantung pada resistansi R6), tidak memerlukan pengontrol dan sensor kecepatan.
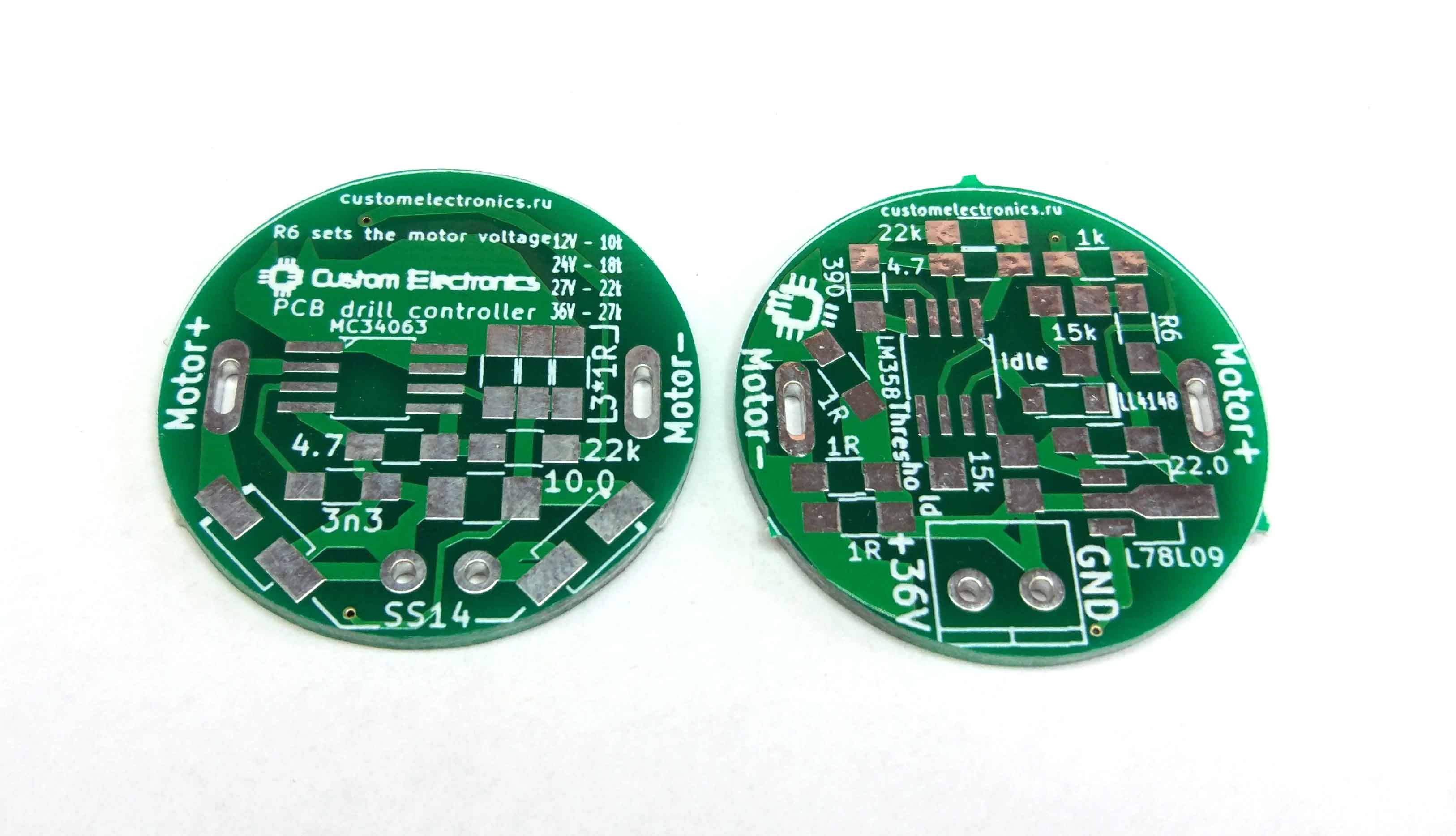
Papan sirkuit
Seluruh rangkaian cocok pada papan sirkuit tercetak dua sisi dengan diameter 30mm. Di atasnya hanya ada beberapa potong vias dan dapat dengan mudah dibuat "di rumah". Di bawah dalam artikel ini akan ada file untuk mengunduh file PCB untuk SprintLaout.
Daftar komponen
Berikut adalah daftar lengkap semua yang Anda butuhkan untuk membangun:
- Papan sirkuit tercetak (tautan ke file untuk pembuatan di akhir artikel)
- U1 - MC34063AD Switching Stabilizer, SOIC-8
- U2 - LM358, penguat operasional, SOIC-8
- U3 - L78L09, stabilizer, SOT-89
- D1, D3 - SS14, dioda Schottky, SMA - 2 lembar
- D2 - LL4148, Rectifier diode, MiniMELF
- C1 - kapasitor, 10uF, 50V, 1210
- C2 - kapasitor, 3.3nF, 1206
- C3, C4 - kapasitor, 4.7uF, 1206 - 2 lembar
- C5 - kapasitor, 22uF, 1206
- R1-R3, R7, R9, R11 - 1 Ohm resistor, 1206 - 6 pcs.
- R4, R10 - 22kΩ resistor, 1206 - 2 lembar
- R5 - 1kΩ resistor, 1206
- R6 - resistor 10-27kOhm, 1206. Perlawanan tergantung pada tegangan pengenal motor yang digunakan. 12V - 10k Ohm, 24V - 18k Ohm, 27V - 22k Ohm, 36V - 27k Ohm
- R8 - Resistor 390 Ohm, 1206
- RV1, RV2 - resistor interlinear, 15kOhm, tipe 3224W-1-153 - 2pcs
- XS1 - terminal, 2 pin, pitch 3.81mm
Kami juga membuat pembatas dering pada printer 3D, untuk pemasangan yang nyaman di engine. Tautan unduhan untuk file STL untuk diunduh di akhir artikel.

Perakitan dan konfigurasi
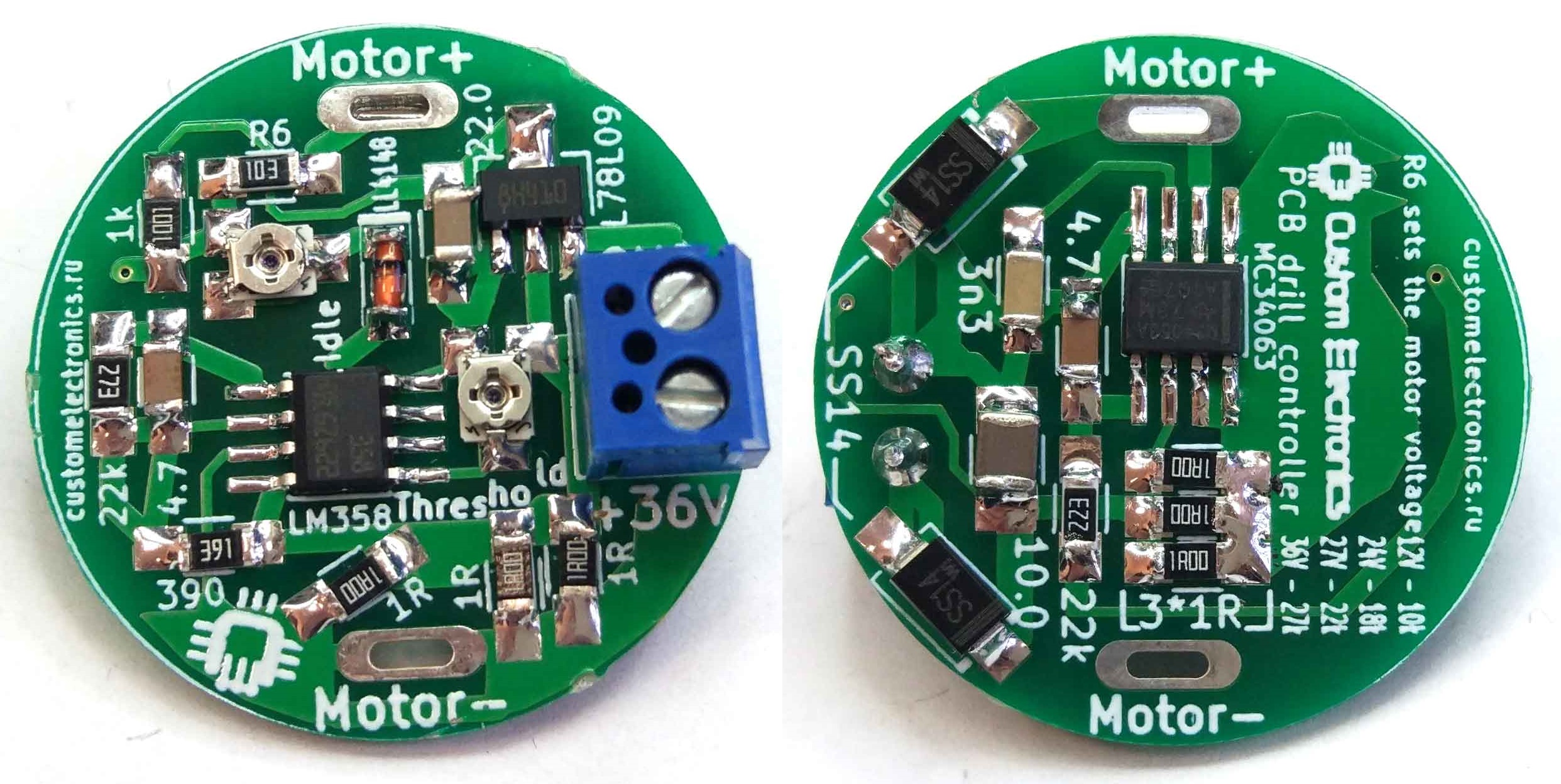
Semuanya akan menjadi sangat sederhana. Bantalan kontak ditarik untuk penyolderan manual.
Layak untuk memulai perakitan papan itu sendiri dengan memasang semua komponen di sisi papan tanpa menyetel resistor, dan kemudian di sisi belakang. Terminal lebih mudah dipasang terakhir. Peringkat R6 dipilih sesuai dengan tegangan pengenal motor Anda. Pada perangkat ini, penting untuk mengontrol posisi kunci pada chip dan polaritas dioda. Semua komponen lainnya tidak polar.
Pasang pengatur jarak antara papan dan motor agar papan tidak menyentuh motor. Papan itu sendiri dikenakan langsung pada sipes mesin. Periksa polaritas koneksi motor beberapa kali sehingga berputar ke sisi kanan, dan kemudian solder kontak.
Kontak untuk memasok tegangan ke input papan ditandatangani dengan "GND" dan "+ 36V". Kekurangan dari sumber tegangan input terhubung ke pin "GND", dan plus ke "+ 36V". Tegangan catu daya harus sesuai dengan tegangan pengenal motor.
Pengaturan regulator sangat sederhana:
- Atur resistor RV2 ke ambang regulator untuk maksimum
- Atur resistor RV1 ke kecepatan idle engine optimal
- Atur resistor RV2 sedemikian rupa sehingga ketika beban sekecil apa pun muncul, tegangan pada motor meningkat
Video
Sulit untuk mengevaluasi efek penggunaan pada video, tetapi sekarang kami selalu mengebor hanya dengan regulator! Hanya perlu sedikit membiasakan diri dan memastikan bahwa latihan dipertajam dengan baik. Dan, tentu saja, kapan saja Anda bisa menyalakannya secara maksimal untuk selalu.
Referensi
Anda dapat menemukan tautan untuk mengunduh semua file yang diperlukan di
halaman utama proyek .
Terima kasih atas minat Anda!