Motor fluks magnetik aksial menggunakan papan sirkuit cetak sebagai kumparan elektromagnetik
Artikel yang diterjemahkan dari spectrum.ieee.org oleh Carl BugejaSemuanya dimulai dengan fakta bahwa saya ingin membuat drone yang sangat kecil. Tetapi saya segera menyadari bahwa satu faktor membatasi upaya untuk mengurangi dan meringankan proyek: motor. Bahkan motor kecil adalah objek terpisah yang perlu dihubungkan ke bagian elektronik dan elemen struktural lainnya. Jadi saya mulai memikirkan cara untuk menggabungkan elemen-elemen ini untuk menghemat berat.
Saya terinspirasi oleh fakta bahwa beberapa sistem radio menggunakan antena, yang merupakan trek tembaga pada papan sirkuit tercetak. Apakah mungkin menggunakan sesuatu yang serupa untuk menciptakan medan magnet yang cukup kuat yang dapat memberi daya pada motor? Saya memutuskan untuk melihat apakah saya dapat membuat motor fluks magnetik aksial menggunakan kumparan elektromagnetik, dibuat dalam bentuk trek pada papan sirkuit cetak. Pada motor fluks magnetik aksial, kumparan elektromagnetik yang membentuk stator dipasang sejajar dengan rotor, dibuat dalam bentuk disk. Magnet permanen dibangun ke dalam rotor disk. Menerapkan arus bolak-balik ke kumparan stator menyebabkan rotor berputar.
Kesulitan pertama adalah memastikan medan magnet yang cukup kuat yang mampu memutar rotor. Cukup sederhana untuk membuat jalur spiral datar dan melewatkan arus melaluinya, tetapi saya membatasi motor hingga diameter 16 mm, sehingga total diameter motor sebanding dengan motor siap pakai terkecil. 16 mm berarti bahwa spiral hanya dapat menghasilkan 10 putaran, dan total kumparan yang terletak pada piringan di bawah rotor bisa menjadi 6. Sepuluh putaran tidak akan cukup untuk mendapatkan medan magnet yang memadai. Namun, papan sirkuit tercetak sangat bagus karena saat ini cukup sederhana untuk membuat papan sirkuit multilayer. Setelah mencetak sebungkus gulungan empat lapis, saya berhasil mencapai 40 putaran per koil, yang cukup untuk memutar rotor.
Selama proses pengembangan, masalah yang lebih serius muncul. Untuk mempertahankan putaran motor, perlu menyinkronkan medan magnet yang berubah secara dinamis antara rotor dan stator. Pada motor tipikal, ini dilakukan dengan menggunakan arus bolak-balik, dan sinkronisasi diperoleh secara alami, berkat pengaturan sikat yang secara elektrik menghubungkan stator dan rotor.
Motor tanpa sikat memerlukan elektronik kontrol dengan sistem umpan balik.
 Setiap lapisan sirkuit memiliki satu set gulungan, dan mereka ditumpuk satu di atas yang lain, menghubungkan satu sama lain dan membentuk trek kontinu.
Setiap lapisan sirkuit memiliki satu set gulungan, dan mereka ditumpuk satu di atas yang lain, menghubungkan satu sama lain dan membentuk trek kontinu.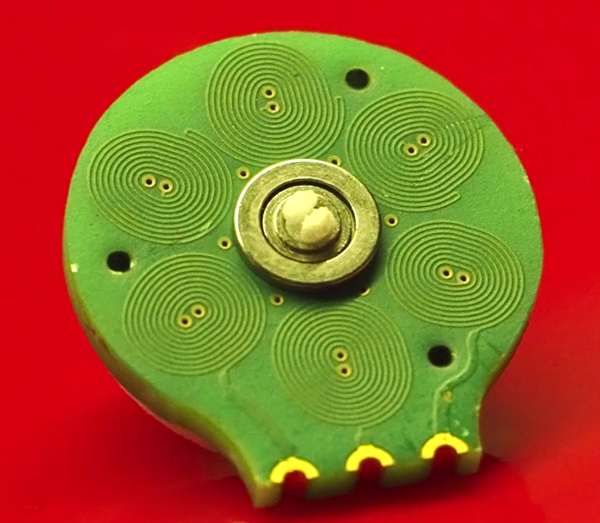 Papan sirkuit tercetak empat lapis terakhir
Papan sirkuit tercetak empat lapis terakhir Pulsa kumparan ini memutar rotor yang dicetak pada printer 3D, di mana magnet permanen dibangun
Pulsa kumparan ini memutar rotor yang dicetak pada printer 3D, di mana magnet permanen dibangun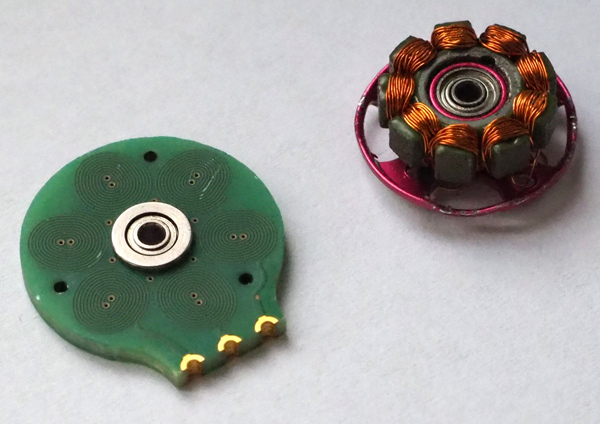 Sistem ini tidak sekuat motor brushless tradisional, tetapi papan sirkuit cetak lebih murah dan lebih mudah.
Sistem ini tidak sekuat motor brushless tradisional, tetapi papan sirkuit cetak lebih murah dan lebih mudah.Pada model mesin yang saya buat sebelumnya, saya menggunakan counter-emfs sebagai umpan balik untuk kontrol kecepatan. Anti-ggl diperoleh karena fakta bahwa motor yang berputar bekerja sebagai generator, menciptakan tegangan di kumparan stator, yang menetralkan tegangan yang memutar motor. Informasi tentang counter-emf memberikan umpan balik yang menunjukkan putaran motor dan memungkinkan kontrol elektronik untuk menyinkronkan kumparan. Tetapi di motor PCB saya, anti-ggl terlalu lemah untuk digunakan. Oleh karena itu, saya memasang
sensor Hall di atasnya, langsung mengukur perubahan medan magnet, untuk mengukur seberapa cepat rotor dan magnet permanennya berputar di atas sensor. Informasi ini masuk ke elektronik yang mengendalikan motor.
Untuk memproduksi rotor, saya beralih ke pencetakan 3D. Awalnya, saya membuat rotor, yang dipasang pada batang logam yang terpisah, tetapi kemudian saya mulai mencetak batang sebagai bagian integral dari rotor. Ini mengurangi jumlah komponen fisik ke rotor, empat magnet permanen, bantalan dan papan sirkuit tercetak, memberikan kumparan dan kekuatan struktural.
Segera, motor pertama saya sudah berjalan. Tes telah menunjukkan bahwa itu secara stabil menyediakan torsi statis 0,9 g * cm. Momen ini tidak cukup untuk menerapkan rencana awal saya untuk membuat motor yang terintegrasi untuk drone, tetapi saya berpikir bahwa motor seperti itu masih dapat digunakan sebagai mesin untuk robot kecil dan murah yang bergerak di atas roda di tanah, jadi saya terus meneliti (biasanya motor berubah menjadi seperti itu). bagian paling mahal dari robot). Motor tercetak dapat beroperasi dengan voltase dari 3,5 hingga 7 V, meskipun pada voltase tinggi ia memanas secara signifikan. Pada 5 V, suhu operasinya adalah 70 ° C, yang cukup dapat diterima. Ini mengkonsumsi sekitar 250 mA.
Saat ini, saya
fokus pada peningkatan torsi. Saya berhasil melipatgandakannya dengan menambahkan lembaran ferit ke bagian belakang gulungan stator untuk membatasi garis medan magnet. Saya juga merencanakan prototipe motor lain dengan sistem belitan lainnya. Selain itu, saya sedang berupaya menggunakan teknologi yang sama untuk membuat
drive linier yang mampu menggerakkan slider yang dicetak di atas serangkaian 12 gulungan. Saya juga menguji prototipe papan sirkuit cetak fleksibel menggunakan gulungan yang sama. Tujuan saya adalah mulai membuat robot baru menggunakan mekanisme yang lebih kecil dan lebih murah daripada yang tersedia saat ini.