Halo semuanya! Belum lama ini, saya mulai belajar pemrograman untuk mikrokontroler. Pada awalnya, menulis program sederhana untuk berkedip LED atau bahkan dua tidak lagi menyenangkan dan semakin membosankan. Dan suatu malam, sambil memikirkan apa yang akan ditempati kepalanya, ia memutuskan untuk mencari proyek yang lebih rumit. Di Internet, saya melihat banyak hal yang dibuat orang, tetapi yang paling utama saya terkejut dengan robot berkaki enam atau hexapod.
Terinspirasi oleh gambar dan video, saya memutuskan untuk mencoba tangan saya. Pengembangan kasing, elektronik dan program akan dilakukan mulai 0.
Tahapan pengembangan:Bagian 1 - DesainBagian 2 - perakitanBagian 3 - KinematikaBagian 4 - lintasan dan urutan matematikaBagian 5 - ElektronikBagian 6 - transisi ke pencetakan 3DBagian 7 - perumahan baru, perangkat lunak aplikasi, dan protokol komunikasiPengembangan model tubuh 3D
Bahan baku dan komponen untuk robot masa depan:
0. Arduno Due (kami akan menulis di Atmel Studio di C murni tanpa Arduino IDE, pada saat yang sama saya akan memberitahu Anda cara menghubungkan debugger ke papan ini) - 1 pc;
1. HLK-RM04 (UART ke WIFI converter) - jembatan transparan dengan UART ke WIFI - 2pcs;
2. Servos MG996R (dari Cina, bagaimana bisa tanpanya) - 18pcs;
3. LM317D2T-TR untuk memberi daya servos + kerapian halus dalam bentuk resistor dan kapasitor;
4. CAD "KOMPAS 3D";
5. Plywood 3mm sebagai bahan untuk case (murah dan baunya enak);
6. Kemampuan untuk memesan pemotongan laser;
7. Waktu. Banyak waktu.
Di awal perjalanan, muncul pertanyaan: "Bangunan seperti apa yang saya inginkan?". Dalam proses menemukan jawaban untuk pertanyaan ini saya menemukan beberapa solusi siap pakai. Paling disukai PhantomX dan A-Pod. Setelah melihat kasus-kasusnya, saya memutuskan sudah memulai pengembangan, tetapi tidak. Masalah berikut muncul: karena saya tidak melihat robot-robot ini di mata saya dan tidak memegangnya di tangan saya, saya memiliki gagasan yang buruk tentang dimensi mereka. Dalam mencari solusi untuk masalah ini, saya menemukan salah satu artikel tentang Habr. Penulis artikel
tomnewmann dengan ramah membagikan kepada saya gambar-gambar proyeknya, yang banyak terima kasih untuknya.
Setelah menghargai dimensi detail masa depan dan sedikit memikirkan semua informasi yang diterima, saya mulai membuat sketsa gambar-gambar case. Saya pikir akan lebih bijaksana untuk memulai dengan desain kaki, karena mereka adalah bagian paling sulit dari tubuh.
Coxa
Setelah beberapa jam refleksi, model Coxa pertama muncul (biasanya menunjukkan titik yang menghubungkan kaki ke tubuh). Node mencoba membuatnya sekompak mungkin. Drive servo akan sepenuhnya berada di dalam, jadi Anda tidak boleh lupa (yang saya lakukan pertama kali) tentang lubang untuk mengeluarkan kabel.
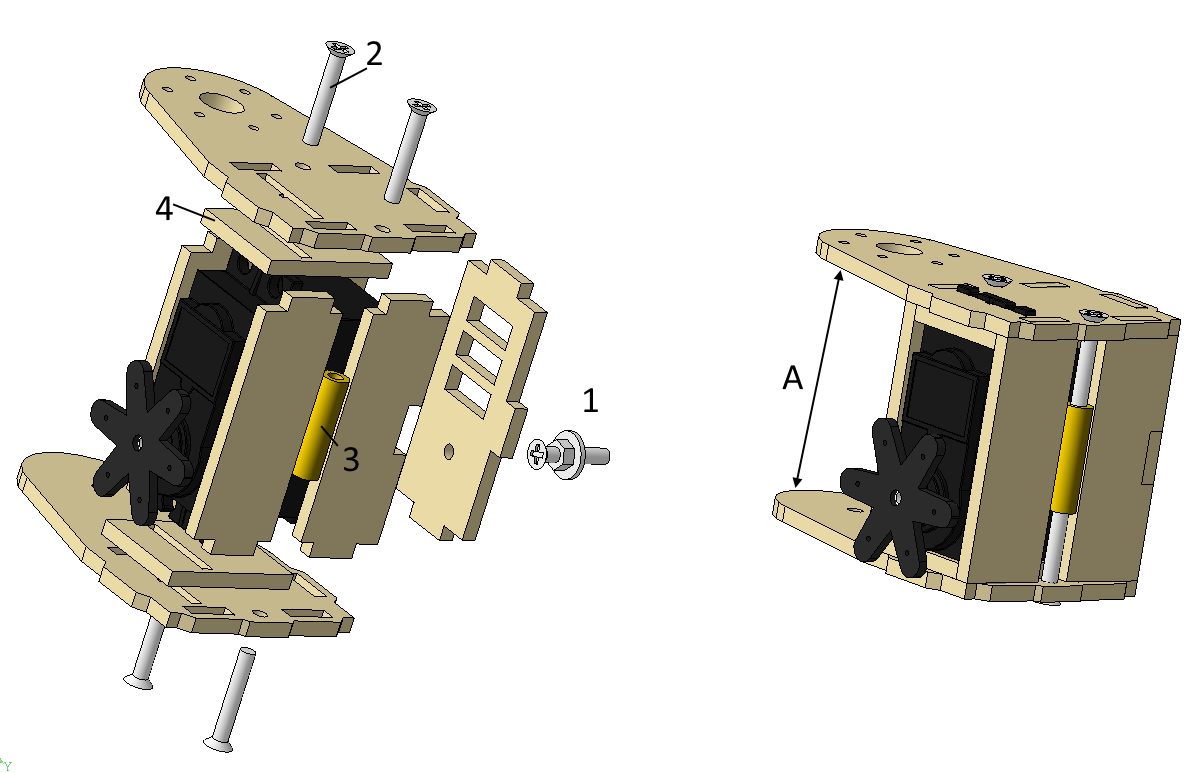 Rincian 1 - Sumbu tempat Femur akan dipasang (bagian kedua dari kaki). Dirakit dari sekrup M3x15, mesin cuci M3, dan mur
Rincian 1 - Sumbu tempat Femur akan dipasang (bagian kedua dari kaki). Dirakit dari sekrup M3x15, mesin cuci M3, dan mur
Bagian 2 - Screw M3x20
Bagian 3 - Rak untuk PCB M3x20
Rincian 4 - Ini adalah semacam kunci servo untuk mencegahnya bergerak secara vertikal.
Ketinggian (A) node ini harus dibuat agar servo drive yang akan berdiri di bingkai bisa masuk ke dalam.Femur
Selanjutnya, Anda perlu melakukan "Femur". Detailnya ternyata yang paling sederhana dan saya pikir tidak perlu komentar.
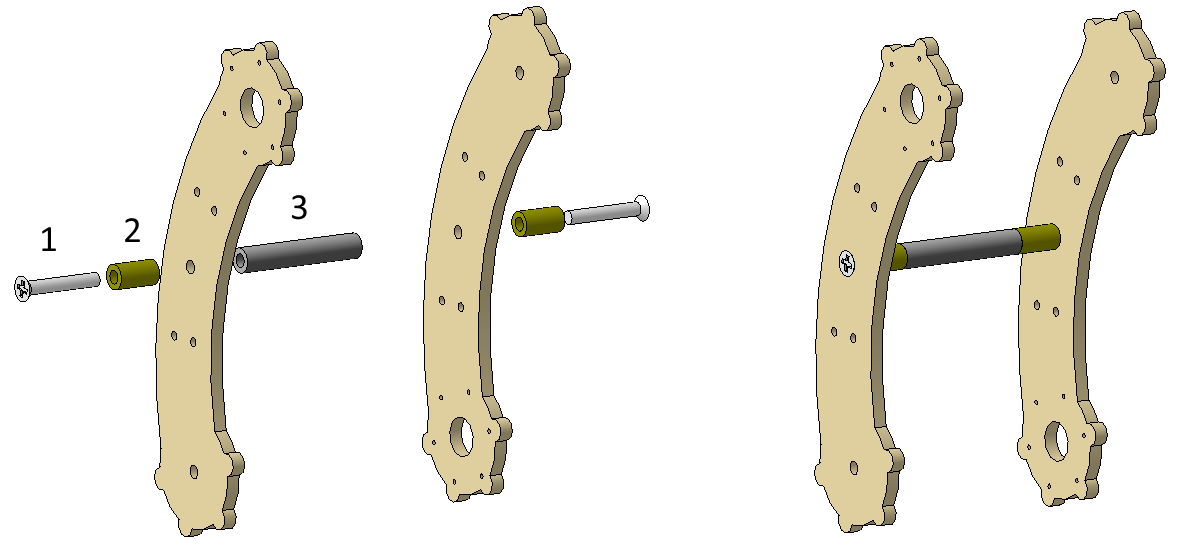 Bagian 1 - Sekrup M3x20
Bagian 1 - Sekrup M3x20
Detail 2 - Lengan plastik 3x10 (Saya tidak menemukan dudukan yang panjang, saya harus mencari solusi lain)
Bagian 3 - Rak untuk PCB M3x30Tibia
Detail selanjutnya adalah Tibia, bagian terakhir dari kaki. Seharusnya tidak ada masalah dengan itu dan panjangnya tergantung pada ketinggian yang direncanakan robot untuk mengerti. Saya memilikinya pada 130mm dari sumbu servo, saya tidak melakukannya lagi, karena dengan bertambahnya panjang beban pada servos juga meningkat, terutama pada servo di Coxa. Di sisi kedua, saya membuat lubang kedua untuk sumbu sehingga servo dapat dibalik dan panjang tuas dapat dikurangi jika tiba-tiba servos keras.
Bingkai
Baris berikutnya adalah bingkai - bagian terbesar. Dialah yang menentukan konfigurasi kaki robot masa depan. Ada beberapa opsi untuk lokasi kaki, tetapi saya memilih opsi dengan huruf Zh (jika dilihat dari atas, serupa).
Pada tahap pertama desain, muncul pertanyaan: "Dan pada jarak berapa kaki harus dari satu sama lain?" Dalam mencari jawaban untuk pertanyaan ini, saya menyadari bahwa tidak ada rekomendasi mengenai hal ini. Mempelajari proyek orang lain dan opsi kiprah, ia menyimpulkan bahwa jarak dipilih berdasarkan sudut maksimum rotasi dahan yang diinginkan. Semakin besar jarak antara kaki, semakin besar sudut yang bisa dicapai anggota tubuh saat berjalan.
Gambar- gambar
tomnewmann membantu
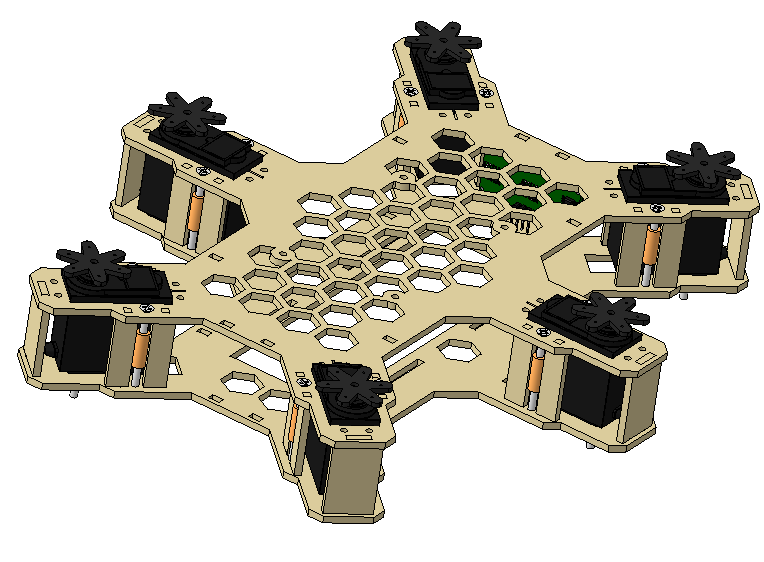
saya memecahkan masalah ini, yang saya ambil jaraknya antara kedua kaki, karena dimensi robot sangat mirip (milik saya sedikit lebih kecil). Beberapa jam kemudian, bagian atas dan bawah bingkai lahir:
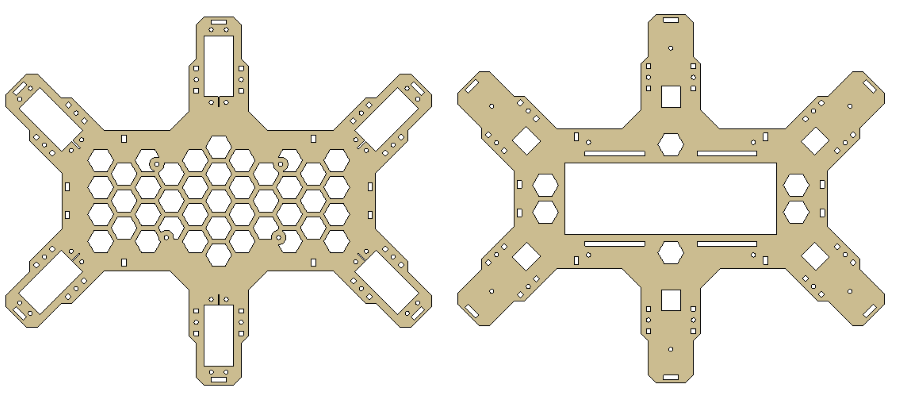
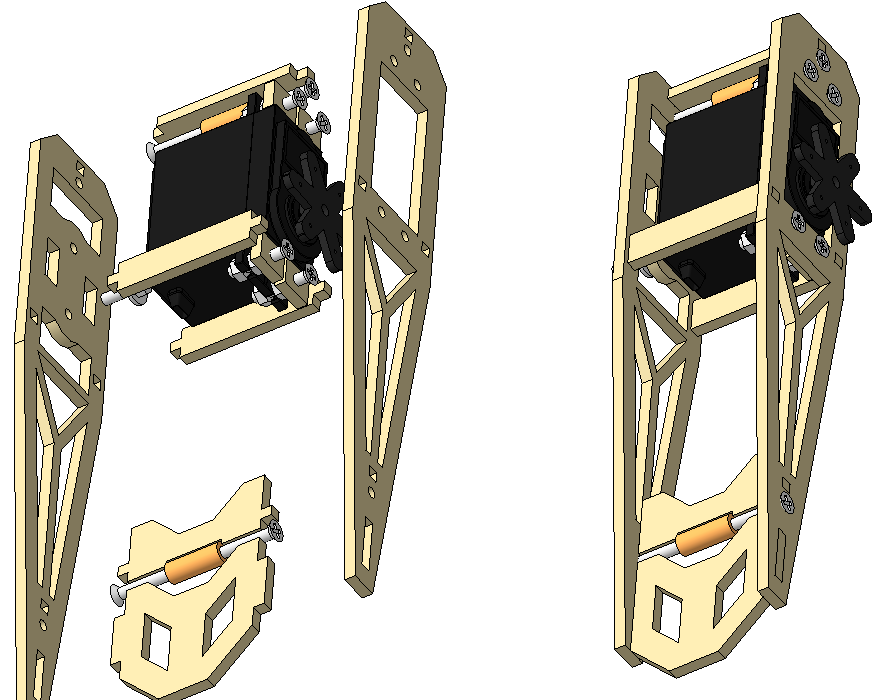
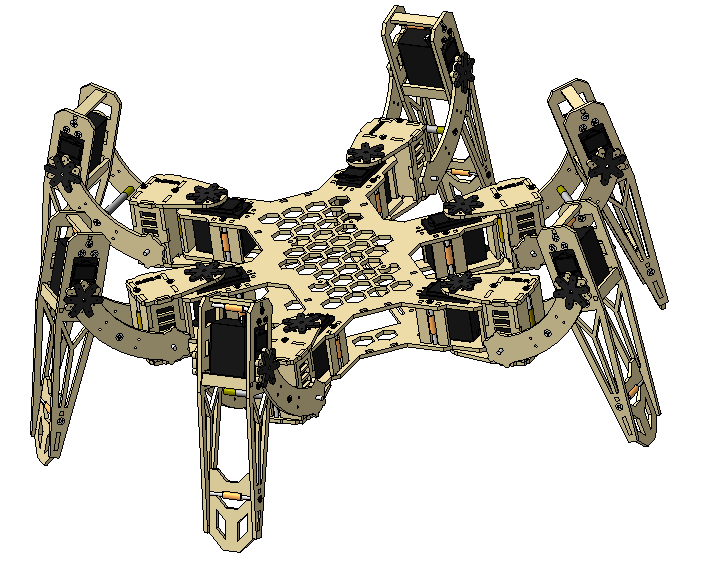
Di bagian bawah bingkai, guntingan dibuat untuk baterai dan pengencangnya. Omong-omong, itu akan diikat dengan Velcro, yang digunakan pada kuadrat saat memasang baterai ke mereka. Bingkainya cukup besar. Setelah duduk 1 malam lagi dan membuat bagian-bagian perantara dalam bentuk penyangga di antara bagian-bagian itu, saya memutuskan bahwa sudah waktunya untuk memasang bingkai dengan servos yang terpasang. Hasilnya tidak lama datang:
Karena kami sudah memiliki semua komponen yang diperlukan, Anda dapat membuat perakitan lengkap kasing ini:
Di tengah kasing antara pelat, direncanakan untuk menempatkan unit catu daya untuk servos, baterai 3S Li-po di bawah, dan papan kontrol (Arduino Due) di atas. Karena itu, saya mengubah perakitan bingkai:
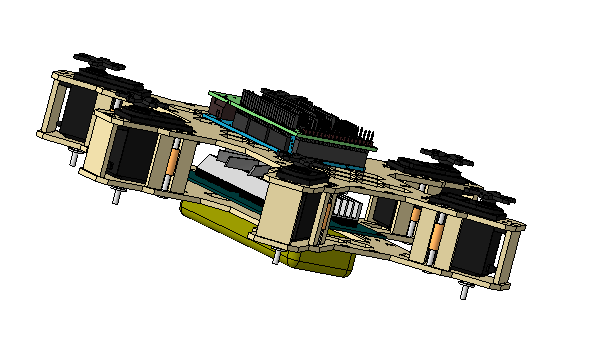 Papan di atas adalah model Arduino Mega dengan semacam perisai. Ini digunakan hanya untuk tampilan dan memiliki dimensi yang sama dengan Due.
Papan di atas adalah model Arduino Mega dengan semacam perisai. Ini digunakan hanya untuk tampilan dan memiliki dimensi yang sama dengan Due.Kelihatannya tidak terlalu bagus, tetapi dengan mempertimbangkan kabel yang akan menonjol akan menjadi lebih buruk. Selain itu, tubuh saya terasa sangat kurus. Saya memutuskan untuk menutupi barang-barang elektronik sebanyak mungkin tanpa memengaruhi penampilan dan muncul dengan nama untuk gagasan saya.
Solusi untuk masalah pertama adalah penutup di bagian atas dan bawah, yang mencakup baterai dan kontrol elektronik. Ini adalah satu-satunya bagian yang akan dirakit dengan lem. Suatu malam kemudian, model sampul bawah lahir.
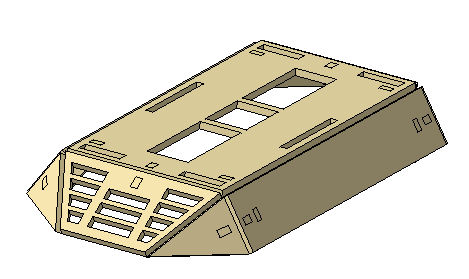
Jika tidak ada masalah dengan tugas pertama, maka dengan tugas kedua ada kesulitan selama 2 hari. Ya, butuh banyak waktu bagi saya untuk mendapatkan nama untuknya. Tanpa sengaja mengingat film "Terminator" memutuskan untuk menyebutnya "Skynet" dan memotong nama di sampul atas. Juga menambahkan guntingan untuk HC-SR04.
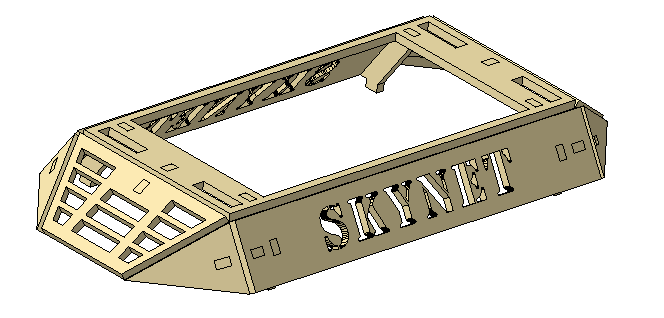
Sebagai hasil dari penambahan hanya dua atap, bodi secara signifikan mengubah penampilan menjadi lebih baik:

Hasilnya saya sangat terkesan dan tampilannya cukup menarik. Pada bagian
kedua saya akan menceritakan tentang perakitan kasus dan menyapu di mana saya melangkah.