Startup Universitas Carnegie Mellon Berniat Mengemudi Persimpangan Menggunakan Radio di Mobil Masa Depan

Hidup ini singkat, dan dalam lalu lintas sepertinya lebih pendek. Atau ketika Anda berdiri di lampu lalu lintas, lampu merah menyala, dan tidak ada yang mengemudi di persimpangan jalan.
Di pinggiran kota-kota seperti Mexico City, Sao Paulo, Roma, Moskow, Beijing, Kairo dan Nairobi, perjalanan pagi hari untuk bekerja dapat melebihi dua jam. Tambahkan jalan pulang dari kerja di sini, dan sering terjadi bahwa orang menghabiskan 3-4 jam di jalan setiap hari.
Bayangkan kita dapat mengembangkan sistem yang akan mengurangi perjalanan pulang pergi harian, misalnya, sepertiga - dari tiga menjadi dua jam. Ini dapat menghemat 22 jam sebulan, atau 3 tahun dalam karier 35 tahun.
Bawa pelancong yang senang dan senang ke tempat kerja dan pulang, karena sistem seperti itu sudah dikembangkan, dan didasarkan pada beberapa teknologi terkini. Salah satunya adalah komunikasi nirkabel antar mobil. Ini sering disebut sebagai teknologi V2V (kendaraan-ke-kendaraan), meskipun sinyal lalu lintas dan infrastruktur lainnya juga dapat dimasukkan dalam koneksi ini. Teknologi lain yang muncul adalah robomobiles, yang menurut sifatnya harus mengurangi waktu mereka bepergian untuk bekerja (dan menjadikan waktu ini lebih produktif). Dan ada juga
Internet of Things (IoT), yang berjanji untuk menyatukan tidak hanya 7 miliar orang, tetapi juga 30 miliar sensor dan perangkat.
Semua teknologi ini dapat dibuat untuk bekerja bersama menggunakan algoritma yang saya dan kolega saya kembangkan di Carnegie Mellon University di Pittsburgh. Algoritme ini memungkinkan mobil untuk bekerja bersama menggunakan sistem pesan on-board mereka sehingga mobil bergerak dengan lancar dan aman tanpa menggunakan lampu lalu lintas apa pun. Untuk proyek ini, kami mendaftarkan perusahaan Lampu Lalu Lintas Virtual [VTL], dengan cermat memeriksa algoritme dalam simulasi, dan sejak Mei 2017, proyek ini telah bekerja di dekat kampus universitas. Pada bulan Juli, kami pertama kali menunjukkan teknologi VTL publik di Arab Saudi, yang dihadiri oleh lebih dari 100 ilmuwan, pejabat pemerintah, dan perwakilan perusahaan swasta.
Hasil pengujian mengkonfirmasi apa yang sudah kami duga: sudah waktunya untuk menolak lampu lalu lintas. Kami tidak akan rugi apa-apa kecuali berjam-jam duduk di mobil dalam lalu lintas.
Prinsip lampu lalu lintas tidak banyak berubah sejak perangkat ini ditemukan pada tahun 1912 dan diperkenalkan di Salt Lake City, dan dua tahun kemudian di Cleveland [
perlu diperjelas bahwa kita berbicara tentang lampu lalu lintas listrik pertama. Perangkat pertama dengan drive manual ditemukan di London pada abad ke-19 / sekitar. perev. ] Ini bekerja pada penghitung waktu, jadi kadang-kadang Anda berdiri dengan warna merah di persimpangan dan tidak melihat mobil lain di dekatnya. pengatur waktu dapat disesuaikan sehingga cocok dengan pola pergerakan pada waktu yang berbeda dalam sehari, tapi itu praktis yang bisa dilakukan - dan itu tidak begitu banyak [di
sini penulis licik - telah ada sistem kontrol lalu lintas otomatis dengan kamera yang menangkap lalu lintas, dan sistem kontrol lalu lintas jarak jauh dari pusat, tempat orang memantau kemacetan lalu lintas / kira-kira. perev. ] Akibatnya, banyak orang menghabiskan banyak waktu setiap hari.
Bayangkan sebagai gantinya, beberapa mobil melaju ke persimpangan, bertukar data berkat teknologi V2V. Mereka bersama-sama memilih dan memilih mobil pemimpin untuk jangka waktu tertentu di mana ia memutuskan arah mana yang menjadi utama - setara dengan lampu hijau - dan di mana arah "kilau merah".
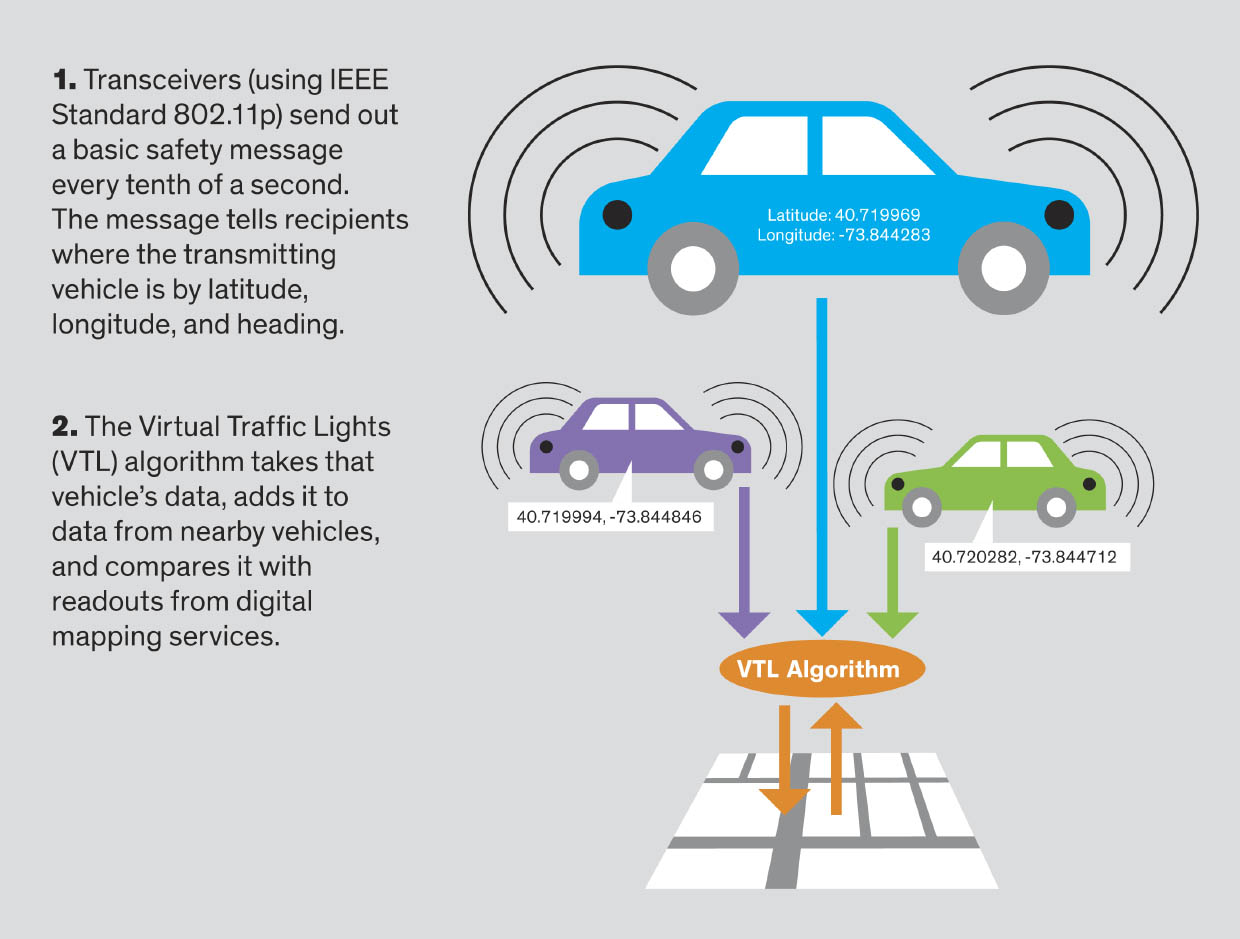 Transceiver IEEE 802.11p mengirim pesan 10 kali per detik. Pesan menunjukkan koordinat mesin dan arah gerakan.
Transceiver IEEE 802.11p mengirim pesan 10 kali per detik. Pesan menunjukkan koordinat mesin dan arah gerakan.
Algoritma menerima data, menambahkannya ke data mesin lain, dan membandingkannya dengan kartu digital.Dan siapa yang memiliki jalan utama? Segala sesuatu terjadi dengan sangat sederhana dan dengan rasa hormat. Pemimpin memberikan status lampu merah ke arah gerakannya, dan memberikan lampu hijau untuk semua mobil yang bepergian secara tegak lurus. Setelah, katakanlah, 30 detik, mesin lain, dalam aliran tegak lurus, menjadi pemimpin, dan melakukan hal yang sama. Kepemimpinan secara konstan ditransfer ke sana-sini untuk secara jujur berbagi tanggung jawab dan beban - lagipula, posisi seorang pemimpin dihubungkan dengan pengorbanan kepentingan pribadi demi kebaikan bersama.
Dengan pendekatan ini, tidak ada lampu lalu lintas yang dibutuhkan. Kontrol lalu lintas berfungsi mulus di infrastruktur nirkabel. Anda tidak akan lagi duduk di mobil, berdiri di lampu merah jika tidak ada yang mengemudi di persimpangan jalan.
Algoritma VTL kami memilih pemimpin dengan menginterogasi parameter seperti jarak ke mobil depan dari setiap pintu masuk ke persimpangan, kecepatan mobil, jumlah mobil di setiap jalan, dll. Hal lain dianggap sama, algoritma memilih mobil yang terletak paling jauh dari persimpangan sehingga memiliki waktu untuk pengereman. Aturan ini memastikan bahwa kendaraan yang paling dekat dengan bundaran mendapat hak jalan - yaitu, lampu hijau virtual.
Penting untuk dicatat bahwa teknologi tidak membutuhkan kamera, radar, dan lidar. Ia menerima semua informasi dari sistem nirkabel yang beroperasi melalui komunikasi jarak pendek khusus (
DSRC ). Ini adalah sirkuit radio dan saluran komunikasi yang dialokasikan untuk mereka, dikembangkan di AS, Eropa dan Jepang dari 1999 hingga 2008, dan memungkinkan mobil-mobil terdekat untuk berkomunikasi satu sama lain. Pengembang DSRC membayangkan berbagai opsi untuk menggunakan standar, termasuk mengumpulkan uang untuk penggunaan jalan tol dan kontrol pelayaran adaptif kooperatif - serta fungsi yang kami gunakan untuk menghindari tabrakan di persimpangan.
Dari pabrik, sistem DSRC memakai sejumlah kecil mesin (dan, mungkin, teknologi 5G yang baru
akan menggantikannya ). Tetapi transceiver semacam itu
dapat dibeli , dan mereka memiliki semua fungsi yang kita butuhkan. Mereka menggunakan
IEEE Standard 802.11p dan diharuskan mengirim pesan sepuluh kali per detik. Pesan harus menunjukkan koordinat dan arah pergerakan kendaraan. Algoritma kami, bekerja pada komputer mobil, menerima data pada mobil, menambahkan data yang diterimanya dari yang tetangga, dan menempatkan hasilnya pada kartu digital seperti Google Maps, Apple Maps atau OpenStreetMap.
Dengan cara ini, setiap mobil dapat menghitung jarak ke persimpangan dan ke mobil lain yang mendekatinya dari arah lain. Dia juga dapat menghitung kecepatan, akselerasi dan lintasan masing-masing mesin. Dan itu semua algoritma perlu memutuskan siapa yang akan melewati persimpangan (lampu hijau) dan siapa yang perlu berhenti (merah). Setelah itu, dashboard masing-masing mobil akan menunjukkan warna lampu lalu lintas, masing-masing untuk pengemudi. Tentu saja, algoritma VTL hanya memecahkan masalah kontrol lalu lintas di persimpangan, definisi tanda "berhenti" dan "beri jalan". Dia tidak mengendarai mobil. Tetapi bekerja di bidangnya, VTL mampu melakukan apa pun yang diperlukan, dan jauh lebih murah daripada teknologi mobil yang sepenuhnya otonom. Robomobiles membutuhkan daya komputasi yang lebih besar hanya untuk mengetahui data yang datang dari sungkup, radar, kamera, dan sensor lainnya, dan lebih dari itu, dengan mengkombinasikannya, mereka mendapatkan gambar ruang di sekitarnya. VTL tidak bersaing dengan teknologi robomobiles, itu melengkapi mereka.
Metode kami dapat dibayangkan sebagai pengganti aturan praktis dengan kecerdasan sejati. Algoritma ini memungkinkan mesin untuk mengontrol lalu lintas sendiri, seperti halnya untuk koloni serangga dan kelompok ikan. Sekelompok ikan pada saat yang sama mengubah arah pergerakannya, tanpa kepala pengendali lalu lintas mengarahkan anggotanya masing-masing. Setiap ikan menerima informasi pergerakan dari ikan tetangga.
Ini adalah contoh perilaku sistem terdistribusi sebagai alternatif dari jaringan terpusat. Dengan bantuannya, armada mobil di kota dapat secara independen mengatur lalu lintas tanpa kontrol terpusat dan intervensi manusia - tidak ada polisi, lampu lalu lintas, berhenti atau memberi tanda jalan.
Kami tidak menemukan konsep persimpangan cerdas, telah ada selama beberapa dekade. Salah satu ide paling awal adalah memasang gulungan magnet di bawah permukaan aspal, yang akan menentukan pendekatan mobil ke persimpangan dan menyesuaikan durasi fase hijau dan merah. Anda juga dapat menggunakan kamera di persimpangan untuk menghitung mobil yang mendekat dan menghitung waktu terbaik untuk fase lampu lalu lintas. Tetapi kedua teknologi itu mahal untuk dipasang dan dirawat, dan karenanya dipasang di beberapa persimpangan.
Kami mulai dengan memperkenalkan algoritma VTL dalam model virtual dua kota: Pittsburgh di AS dan Porto di Portugal. Kami mengambil data lalu lintas dari Biro Sensus A.S. dan agensi Portugis yang relevan, menambahkan peta dari Google Maps, dan memasukkan semuanya ke SUMO (
Simulasi Mobilitas Perkotaan , simulator lalu lintas perkotaan) - perangkat lunak sumber terbuka yang dikembangkan oleh German Aerospace Center.
SUMO mensimulasikan jam sibuk dalam dua skenario - satu menggunakan lampu lalu lintas yang ada, yang lain menggunakan algoritma VTL kami. VTL ditemukan mengurangi waktu tempuh rata-rata dari 35 menit menjadi 21,3 menit di Porto dan dari 30,7 menit menjadi 18,3 menit di Pittsburgh. Penurunan waktu perjalanan orang yang memasuki kota dari pinggiran kota berkurang tidak kurang dari 30%, dan hingga 60%. Yang penting, variasi waktu perjalanan - penyimpangan jumlah dari rata-rata - juga menurun.
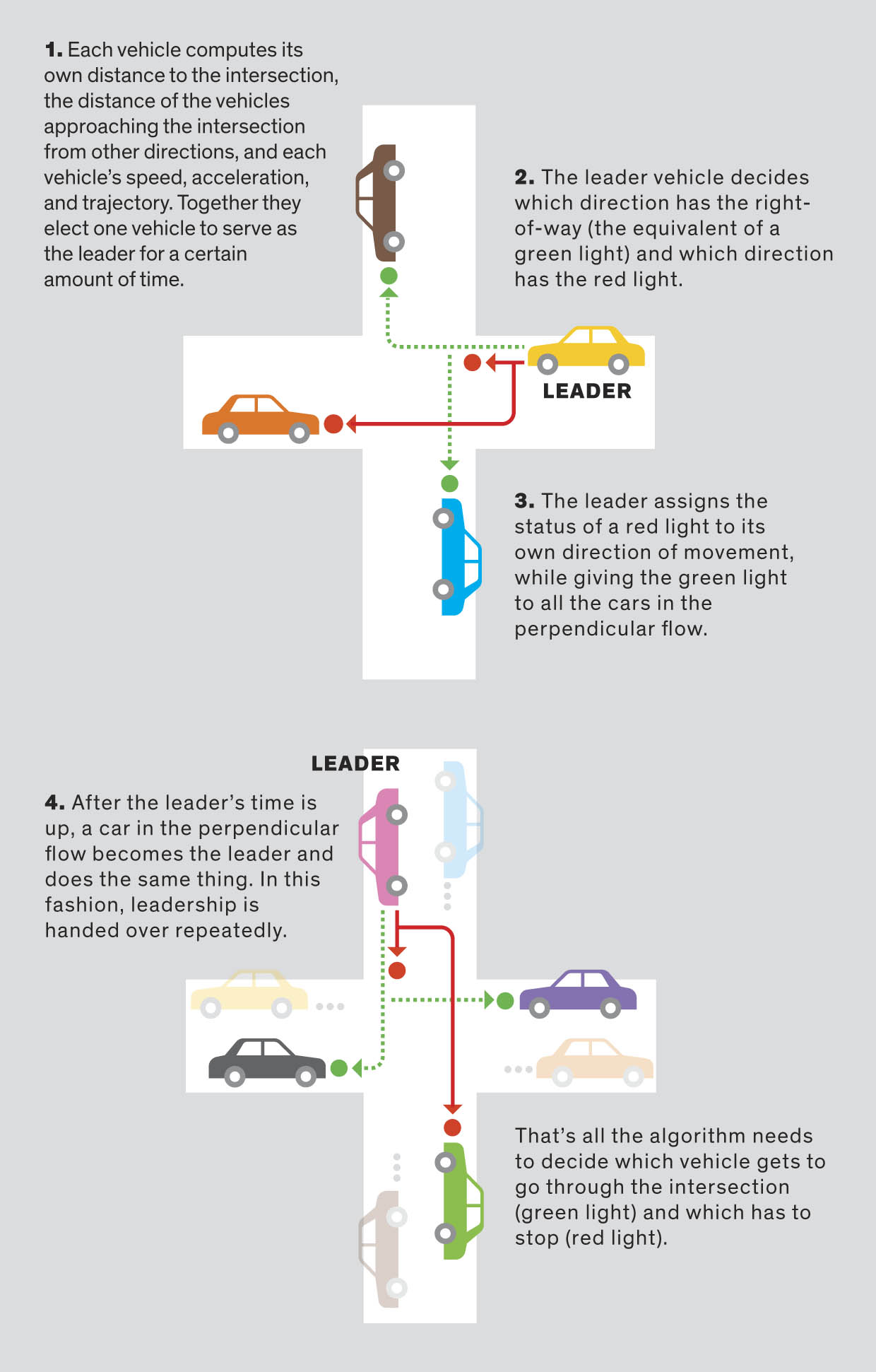 Skema Seleksi Pemimpin
Skema Seleksi PemimpinWaktu disimpan karena dua alasan. Pertama, VTL menghilangkan waktu tunggu di lampu lalu lintas merah ketika tidak ada yang mengemudi di persimpangan jalan. Kedua, VTL mengontrol lalu lintas di semua persimpangan, dan tidak hanya di mana ada sinyal aktif. Karena itu, mobil tidak harus, misalnya, berhenti di mana ada tanda berhenti, jika tidak ada mobil lain di dekatnya.
Simulasi kami telah menunjukkan manfaat lain - bahkan mungkin lebih penting daripada menghemat waktu. Jumlah kecelakaan lalu lintas berkurang hingga 70%, dan sebagian besar, pengurangan terjadi di persimpangan dan di halte. Juga, dengan meminimalkan waktu yang dihabiskan untuk berdiri di depan lampu lalu lintas, mempercepat dan mengerem, VTL secara signifikan mengurangi emisi karbon dari mobil.
Apa yang diperlukan untuk mentransfer VTL dari laboratorium ke dunia nyata? Pertama, Anda perlu membangun DSRC di mobil yang diproduksi. Pada tahun 2014, Administrasi Keselamatan Lalu Lintas Jalan Raya Nasional Amerika Serikat mengusulkan menggunakan teknologi ini, tetapi administrasi Trump belum mengembangkan aturan yang sesuai, dan belum jelas keputusan akhir apa yang akan diambil. Oleh karena itu, produsen di Amerika Serikat akan enggan untuk mengintegrasikan transceiver DSRC ke dalam mesin, karena mereka meningkatkan biaya mereka dan akan berguna hanya jika mereka berada di mesin lain - masalah ayam dan telur standar.
Sampai sejumlah mesin dilengkapi dengan perangkat semacam itu, skala produksi akan tetap rendah, dan biayanya akan tetap tinggi. Di AS, hanya General Motors yang mulai mengintegrasikan radio DSRC ke dalam mobil, dan semuanya adalah model Cadillac yang mahal. Namun, di Eropa dan Jepang gambarnya lebih positif. Banyak pembuat mobil Eropa memutuskan untuk mengintegrasikan transceiver ini ke dalam mobil, dan tahun ini dimulai di Jepang, di mana pemerintah menganjurkan penggunaan teknologi, dan raksasa manufaktur Toyota telah berulang kali mengkonfirmasi kesiapannya untuk langkah ini.
Tetapi bahkan jika tidak ada yang terjadi dengan DSRC, algoritma kami dapat dibangun berdasarkan teknologi nirkabel lainnya, misalnya, 5G atau Wi-Fi.
Konsep penetrasi transceiver yang tidak lengkap menimbulkan masalah salah satu hambatan terbesar untuk implementasi VTL. Bisakah ini bekerja jika hanya sebagian kecil mobil yang dilengkapi dengan pemancar? Ya, jika pejabat memutuskan untuk melengkapi lampu lalu lintas yang ada dengan teknologi ini.
Pejabat mungkin ingin melakukan ini, jika hanya itu, agar tidak meninggalkan infrastruktur yang ada senilai ratusan miliar dolar. Kami menawarkan solusi jangka pendek untuk masalah ini: Anda dapat memperbarui lampu lalu lintas yang ada sehingga mereka dapat mengenali keberadaan mobil yang dilengkapi dengan DSRC di jalan, dan dengan demikian mengatur fase hijau dan merah. Keindahan skema ini adalah bahwa semua mobil dapat menggunakan jalan dan persimpangan, terlepas dari keberadaan radio. Pendekatan ini mungkin tidak mengurangi waktu sebanyak solusi yang ideal, tetapi masih akan 23% lebih baik daripada sistem manajemen lalu lintas saat ini, menurut simulasi dan uji coba lapangan kami di Pittsburgh.
Masalah lain adalah bagaimana menghadapi pejalan kaki dan pengendara sepeda. Bahkan jika semua mobil dan truk secara paksa dilengkapi dengan transceiver, orang tidak dapat berharap bahwa pengendara sepeda akan mengaturnya dan dibawa oleh pejalan kaki. Karena itu, akan sulit bagi orang untuk melewati persimpangan yang sibuk dengan aman.
Solusi jangka pendek kami, untuk periode keberadaan bersama lampu lalu lintas dan VTL, adalah memberi pejalan kaki kesempatan untuk mengatur jalan utama mereka sendiri. Dalam program percontohan kami di Pittsburgh, kami menempatkan tombol yang menyalakan lampu merah - nyata untuk pejalan kaki, dan virtual untuk mobil - di keempat sisi persimpangan. Sistem ini berfungsi setiap kali diaktifkan.
Dalam jangka panjang, masalah pengendara sepeda dan pejalan kaki dapat diselesaikan dengan bantuan Internet. Dengan ekstensi IoT, saatnya akan tiba ketika semua orang akan selalu membawa perangkat yang mendukung DSRC.
Sementara itu, kami telah menunjukkan bahwa dalam kondisi ideal, tanpa sinyal fisik apa pun, mobil yang memilih hak jalan dapat mengalokasikan sebagian dari siklus tersebut kepada pejalan kaki. Selama shift, lampu merah virtual menyala di semua mobil di semua pintu masuk persimpangan, dan bertahan cukup lama bagi pejalan kaki untuk menyeberang jalan dengan aman. Solusi pendahuluan ini tidak akan optimal untuk aliran yang padat, jadi kami sedang mengerjakan metode yang menggunakan kamera murah yang dipasang di dashboard mobil, yang seharusnya membantu memperhatikan pejalan kaki dan memberi jalan kepada mereka.
Teknologi yang menjanjikan dari lampu lalu lintas virtual membuat pendekatan era robomobiles. Hari ini kita membayangkan bahwa mobil-mobil seperti itu akan melakukan segala hal yang dilakukan oleh pengemudi manusia: berhenti di lampu lalu lintas, memberi jalan pada tanda "beri jalan", dan sebagainya. Tetapi mengapa melakukan otomatisasi hingga setengahnya? Akan jauh lebih baik jika mesin seperti itu sepenuhnya independen mengendalikan pergerakan tanpa tanda dan sinyal yang biasa. Kunci untuk mencapai ini adalah V2V dan infrastruktur komunikasi ini.
Ini penting, karena robot mobil masa kini sering gagal menavigasi dan berkendara melalui persimpangan yang sibuk. Ini adalah salah satu masalah teknis yang paling sulit, dan terus mengganggu pemimpin industri Waymo.
Dalam simulasi dan uji coba lapangan kami, kami menemukan bahwa robomobiles yang dilengkapi VTL dapat mengontrol persimpangan persimpangan tanpa lampu lalu lintas dan rambu-rambu. Tidak adanya kebutuhan untuk mengenali objek-objek ini sangat menyederhanakan algoritma penglihatan komputer dan komputer yang menjalankannya, yang diandalkan oleh robot mobil eksperimental saat ini. Elemen-elemen ini secara total, bersama-sama dengan sensor (terutama lidar) mewakili bagian paling mahal dari robomobiles.
Karena arsitektur perangkat lunak VTL bersifat modular, maka akan mudah untuk mengintegrasikannya ke dalam perangkat lunak robot mobil. Selain itu, VTL mampu memecahkan sebagian besar, jika tidak semua masalah paling sulit yang terkait dengan visi komputer - misalnya, jika matahari bersinar di kamera, atau hujan, salju, badai pasir atau tikungan jalan menghalangi pandangan. VTL, tentu saja, tidak bersaing dengan teknologi robot; itu melengkapi mereka. Dan ini saja dapat membantu mempercepat peluncuran robomobiles di jalan.
Tetapi kami berharap bahwa jauh sebelum titik ini, sistem kami akan bekerja di mesin yang dikontrol orang. Sudah bulan Juli ini, kami dapat mengadakan demonstrasi publik tentang teknologi di kota Riyadh di Arab Saudi, dengan panas 43 ° C, dengan perangkat yang dipasang pada mesin uji. Pemerintah, akademisi, dan perusahaan - termasuk Uber - naik bus Mercedes-Benz dan berkeliling kampus sains dan teknologi King Abdulaziz, melintasi tiga persimpangan, dua di antaranya tidak memiliki lampu lalu lintas. Bus, serta truk GMC, Hyundai SUV dan mobil penumpang Citroën melintasi persimpangan ini dengan segala cara yang memungkinkan, dan sistem VTL bekerja setiap waktu dengan sukses. Ketika satu pengemudi tidak secara khusus mematuhi lampu lalu lintas merah dan mencoba menyeberang persimpangan, sistem keamanan kami bekerja dengan menunjukkan lampu merah menyala ke semua mobil yang mendekat, yang mencegah insiden tersebut.
Saya harap momen ini adalah titik balik dalam sistem manajemen transportasi kami. Lampu lalu lintas bekerja dengan baik. Dan memang, mereka telah ada selama lebih dari seratus tahun. Sudah waktunya untuk pindah.