
Hai
Saya seorang surveyor, kolega dari CROC meminta saya untuk berbicara tentang bagaimana kita merombak drone, bagaimana memprogram penerbangan dan bagaimana kita memproses semuanya nanti, mengubah gambar yang diambil dari drone menjadi ortofotomaps terperinci, model medan tiga dimensi presisi tinggi dan rencana topografi dengan skala 1: 500–1 : 10.000.
Tim saya dan saya mencoba beberapa drone yang berbeda dan akhirnya memilih DJI Phantom 4 PRO "pekerja keras" dengan beberapa modifikasi. Hal pertama dan terpenting yang kami lakukan dengannya adalah melengkapinya dengan penerima GNSS geodetik, yang memungkinkan kami untuk menentukan pusat-pusat fotografi dengan akurasi sentimeter.
GPS standarnya memberikan akurasi urutan 15-20 meter. Untuk mengatasi masalah geodetik dengan ketepatan seperti itu, Anda memerlukan salib khusus di tanah, atau distorsi lain, seperti meletakkan pelat kertas dengan koordinat yang diketahui.

Kami membuatnya lebih sederhana dan lebih rumit: kami menempatkan base station berbasis darat dengan koordinat yang diketahui dengan tepat, dan mengintegrasikan penerima GNSS tambahan ke dalam drone dan memasang antena eksternal. Sebagai contoh, kami mulai dengan MATRICE 600 dengan sistem DJI yang terpasang pada D-RTK, yang sangat rumit, mahal dan tidak nyaman untuk menyelesaikan tugas-tugas geodetik.
Kemudian kami membuat ulang DJI PHANTOM 4 PRO yang lebih ringkas: kami dapat mengintegrasikan peralatan GNSS tambahan ke dalam paket standar. Total massa drone meningkat sekitar 100 gram. Waktu penerbangan sedikit rusak, tetapi tidak kritis: satu set empat baterai sudah cukup untuk menyelesaikan survei 200-300 ha.
Hantu memberi satu peluang penting - set utama mulai pas di tas tangan pesawat penumpang. Artinya, kita sekarang dapat membawa seluruh set peralatan ke mana saja dengan sangat, sangat sederhana.
Perangkat minimum adalah pesawat tanpa awak yang dimodifikasi (seluruh perangkatnya), penerima geodetik GNSS sebagai stasiun pangkalan darat, laptop dengan program perencanaan penerbangan, peta yang diunduh (untuk bekerja tanpa internet) dan rencana penerbangan yang ditulis untuk masalah tersebut, jika ada peluang di muka. Masih membutuhkan baterai tambahan, pengisi daya (atau beberapa) dan generator. Kami mengambil generator bensin, yang dibuat dalam bentuk kasing, sangat nyaman untuk kebutuhan kita. Atau inverter untuk ditenagai oleh mesin mobil. Untuk beberapa daerah, Anda perlu melakukan lebih banyak pemanasan (khususnya untuk baterai dan tangan).
Dari satu baterai, Anda dapat memotret 50 hektar dengan resolusi 2-5 sentimeter per piksel.
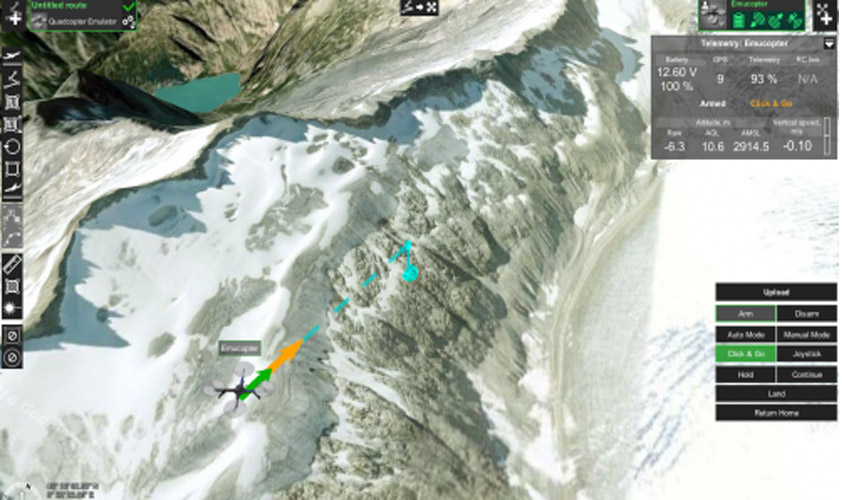
Kami bekerja seperti ini: kami tiba di tempat dengan tugas untuk drone yang dirinci sebelumnya (di kantor). Kami menggunakan UgCS (ini adalah perangkat lunak perencanaan penerbangan drone profesional yang agak mahal yang menjual dan menyarankan integrasi dan peningkatan CROC di Rusia. Tentu saja, perangkat lunak semacam itu berlaku tidak hanya dalam geodesi, tetapi juga dapat digunakan oleh penyelamat, ahli agronomi, pembangun, dll., tetapi dalam bidang ini saya tidak kuat, jadi semua pertanyaan ditujukan kepada kolega dari CROC). Di dalamnya kami menunjukkan batas-batas area kerja, tumpang tindih melintang, ketinggian pemotretan, dan kemudian perangkat lunak itu sendiri akan menghitung rute penerbangan drone, dengan mempertimbangkan fitur medan. Artinya, UgCS memotong segalanya sebagaimana mestinya: dengan pendaratan perantara untuk mengganti baterai dan sisanya.
Kami melihat apakah ada kendala yang tidak terhitung, lalu kami mendirikan stasiun pangkalan GNSS. Koordinat titik dasar ditentukan oleh receiver Topcon GR-5.

Selanjutnya sudah ada misi penerbangan. Berikut adalah batas zona flyby dan tumpang tindih longitudinal atau transversal untuk perekatan. Kami menempatkan sepasang titik kontras kontrol untuk kontrol:

Untuk menghubungkan autopilot dari GNSS, kami menghubungkan drone ke remote control, remote control ke tablet dengan program kontrol DJI, dan kemudian tablet ke laptop. Mengkonfigurasi bundel ini saat bepergian tidaklah mudah. Di sini, kolega saya dari CROC sangat membantu saya: menginstal, menyesuaikan, menguji sebelum diluncurkan.
Poin berikutnya adalah bahwa kira-kira setiap objek ketiga terletak di mana tidak ada akses Internet yang stabil. Perangkat lunak mengatasi ini. Tetapi ada juga daerah yang sulit, misalnya, gunung, di mana masalah dengan perambatan sinyal sudah mulai. Itulah mengapa kami menggunakan Phantom: mereka memiliki banyak sensor bawaan untuk menghindari rintangan. Ketika dia kehilangan kontak, dia kembali. Ketika dia tidak bisa kembali, dia mulai duduk. Dan sensor ini membantu Anda terbang dalam kondisi sulit, seperti dataran tinggi atau di kota. Kami memiliki beberapa kasus di mana sensor hambatan membantu menghindari keadaan darurat. Misalnya, di pegunungan emirat Fujairah (UEA), kami kehilangan kontak dengan drone, dan karena angin, drone tidak dapat kembali ke titik take-off. Kemudian autopilot membuat keputusan untuk mendarat dan, menggunakan sensor penghalang, mendaratkan drone di celah antara dua lereng pegunungan di area yang relatif datar.
Hasil dari penerbangan drone adalah foto di titik-titik ini (perangkat lunak ini untuk pemrosesan sudah menyoroti pusat mereka):
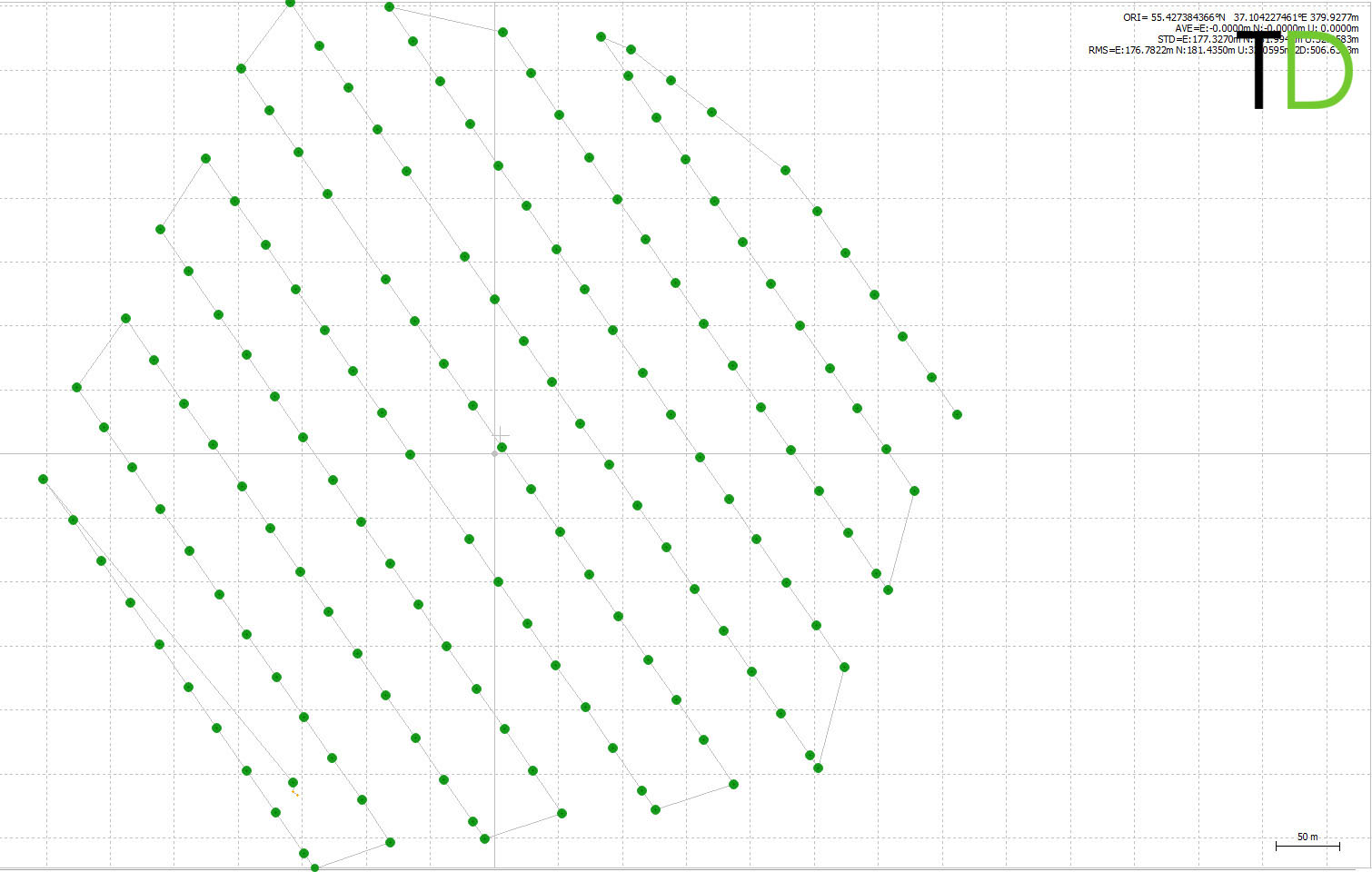
Pengukuran GNSS diunduh secara terpisah melalui Wi-Fi setelah penerbangan selesai, disimpan di drone dan tidak disiarkan ke darat secara real time.
Anda dapat pergi lebih jauh, karena langkah selanjutnya adalah pemrosesan fotogrametri foto udara. Koordinat titik kontrol tanah hanya digunakan untuk kontrol:

Berikut ini adalah cloud point setelah klasifikasi. Warna menyoroti vegetasi, penyangga, kabel saluran listrik, bangunan dan struktur:
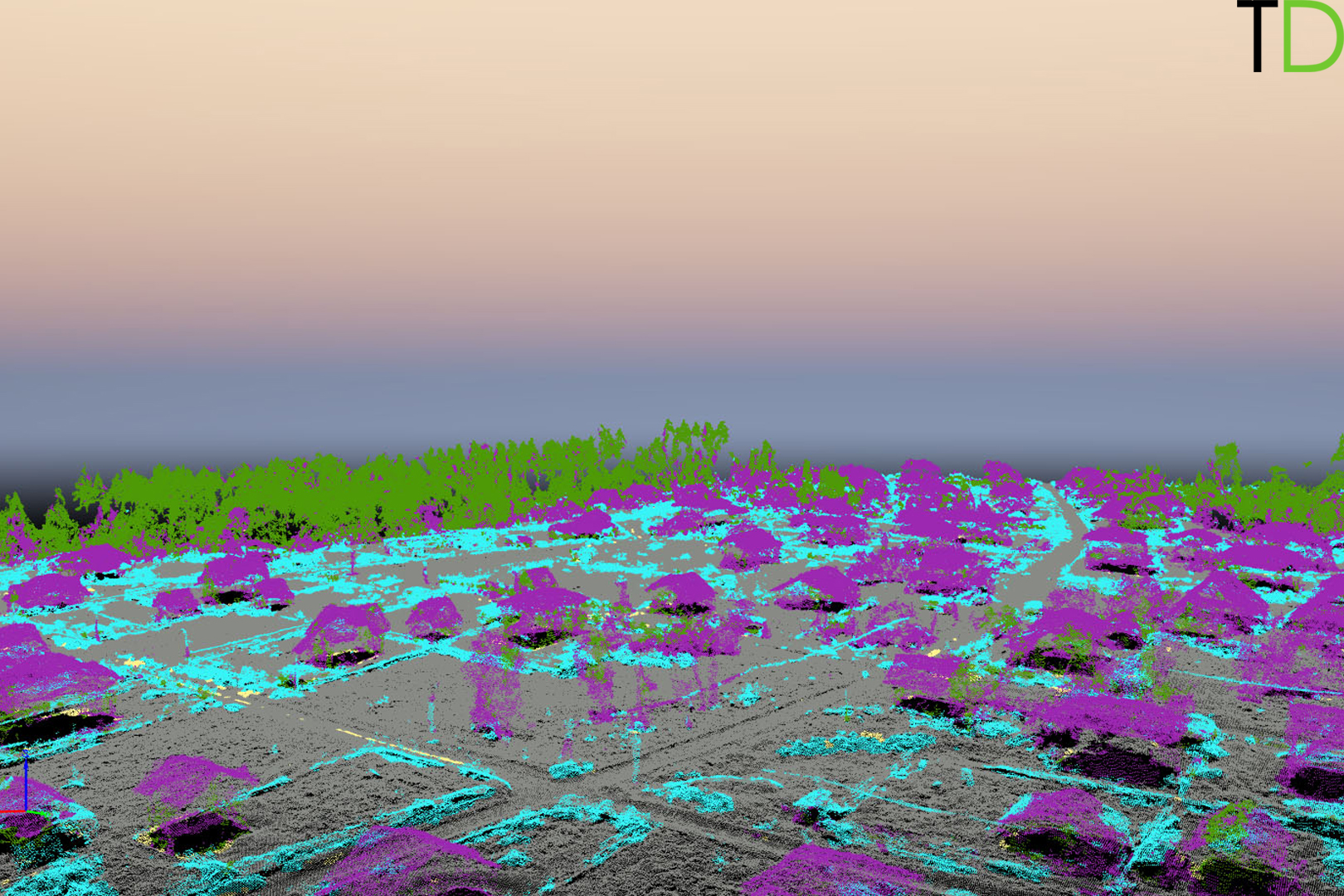
Dan ini sudah menjadi model 3D untuk cloud ini:

Di desa pondok ini, tugasnya sederhana: 5 cm per piksel, lanskap sederhana, minimum pohon, tidak ada gangguan. Kami menerima orthophotomap dan menggabungkannya dengan rencana kadaster:
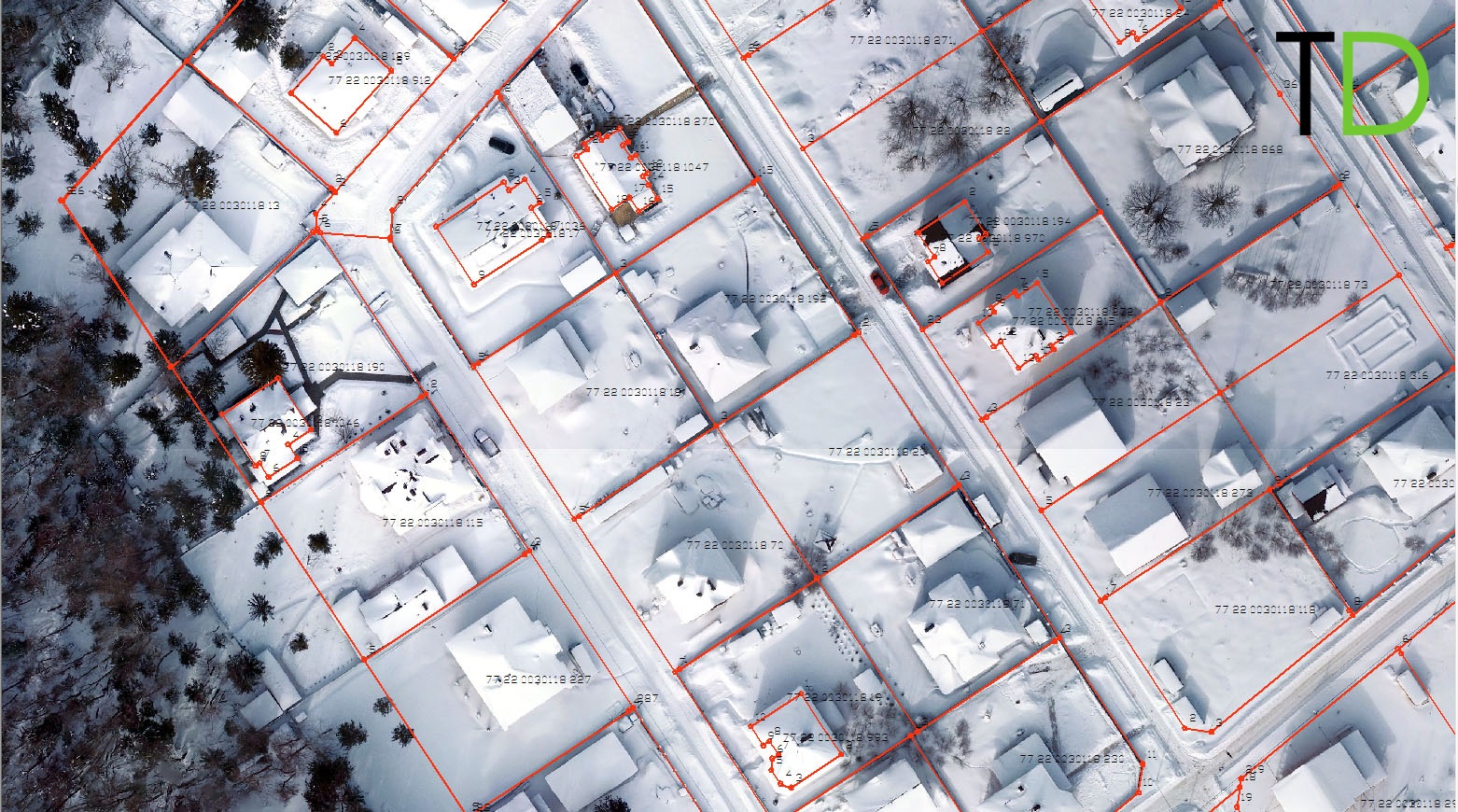
Hal ini dapat digunakan untuk survei tanah, inventarisasi dan penilaian kadaster plot tanah, menilai efektivitas penggunaan lahan, merancang pengembangan wilayah, desain dan survei, rekonstruksi dan pengembangan jaringan jalan, memantau status komunikasi darat dan bawah tanah, jaringan pipa, saluran listrik, dll., pemantauan lahan untuk tujuan perlindungan, pemantauan lingkungan terhadap batas-batas dan area lahan yang dapat berubah, pembuatan model medan tiga dimensi untuk GIS.
Mengapa UgCS? Karena tidak ada opsi lain di pasar, yang lainnya adalah level amatir. Sangat nyaman bahwa setiap drone dapat ditempatkan pada misi, dan itu hanya akan terbang: seluruh garis DJI didukung termasuk Maviki dan selusin drone yang lebih populer dalam geodesi. Tidak ada ikatan dengan besi sama sekali. Perencanaan yang sangat bagus - dari kantor. Kontrol normal dari laptop dengan joystick atau KLIK & GO, geocoding gambar yang baik untuk Photoscan atau Pix4D. Ada perangkat lunak alternatif di pasaran tanpa harus membawa laptop, tetapi dengan fitur yang jauh lebih sedikit. Laptop adalah keuntungan besar, tetapi juga kutukan dari sistem: itu sangat menyulitkan perjalanan bisnis. Di musim dingin, semua ini menjadi lebih rumit karena fakta bahwa baterai seluruh bundel membeku, dan Anda harus bekerja dengan sarung tangan (yang tidak terlalu akurat). Tetapi belum ada opsi lain: ketidaknyamanan seperti itu, atau kemampuan terbatas.
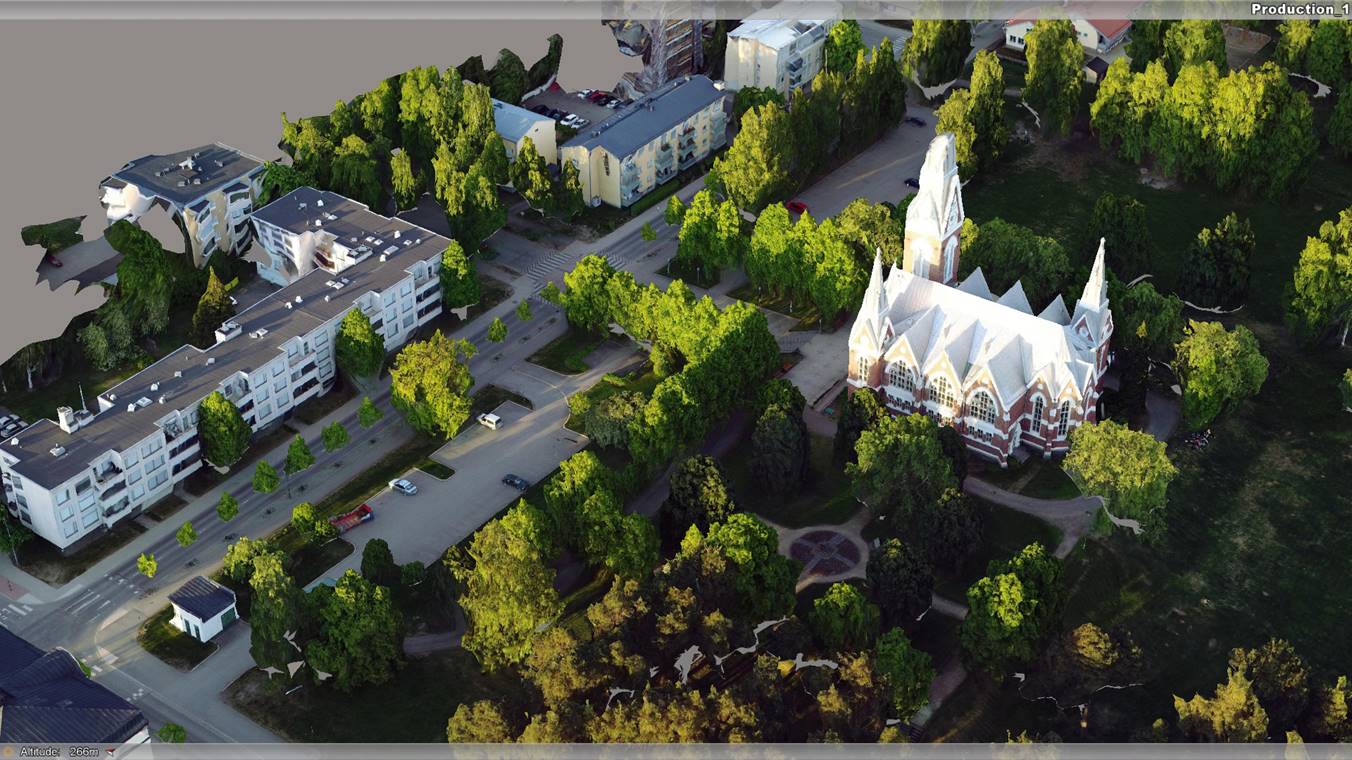
Berikut adalah contoh hasil model kota tiga dimensi:
Berikut adalah objek lain - model tambang tiga dimensi:


Ini adalah sebuah cerita.
Referensi