
Hotel dan taman hiburan membutuhkan pertunjukan drone. Seniman dan kembang api itu bagus, tetapi tidak cukup. Anda harus membuat sesuatu yang cerah untuk para tamu. Pertunjukan drone hanyalah itu. Kami berpartisipasi dalam proyek penyelenggaraan pertunjukan drone reguler untuk satu taman hiburan asing.
Dan sekarang kita tahu bagaimana melakukan pertunjukan yang sama di Rusia.
Ketika datang ke segerombolan 300 atau 1.000 kendaraan di armada, akurasi posisi (yaitu, lokasi masing-masing individu drone relatif terhadap tanah dan satu sama lain) tidak memainkan peran khusus. Ini adalah massa yang bergegas, di mana partikel berada pada jarak beberapa meter dari satu sama lain. Massa sangat mahal. Plus atau minus meter tidak masalah di sini: mereka mengambilnya dengan fakta bahwa pemirsa jauh, dan oleh fakta bahwa ada banyak drone. Bahkan jika beberapa keping jatuh - tidak apa-apa. Tetapi hotel dan taman, penyelenggara acara yang tidak terlalu besar, misalnya, membutuhkan drone dalam jumlah 20–90 buah, dan di sini pemosisiannya sangat penting.
Dalam hal ini, Anda hanya dapat menggunakan akurasi dan sinkronisasi. Kami memecahkan masalah ini.
Mengapa dan bagaimana itu semua
CROC memiliki divisi robotika. Itu muncul pada 2012 dan terlibat dalam berbagai hal menarik, tetapi arah utamanya adalah kontrol UAV. Kami memotong softink kami sendiri untuk mengendalikan drone dan menyelesaikan tugas yang tidak standar. Peserta dalam kompetisi 2013 dapat mengetahui
kode ini di github, yang kami kembangkan dan gunakan untuk mengendalikan drone dalam kompetisi drone terbang. Pada saat itu, kami sedang menyelesaikan tugas baru untuk pasar - membuat drone membeku di tempat yang tepat, dengan hati-hati menghindari sudut dan hambatan. Hari ini sepertinya konyol.
Selain itu, kami sedang melakukan proyek manajemen UAV berdasarkan perangkat lunak vendor, termasuk perangkat lunak SPH Engineering. Mereka memiliki stasiun bumi perangkat lunak UgCS dan pusat komando lengkap untuk slot data besar. UgCS dapat mengendalikan sekelompok besar kendaraan tak berawak, yang membedakannya dari stasiun kontrol darat konvensional. Yang kami maksud dengan manajemen adalah merencanakan rute penerbangan, misalnya, untuk operasi penyelamatan atau terbang di sekitar batas keamanan, mengirim perintah jarak jauh dan memantau status kendaraan. Bahkan, untuk pertunjukan drone, kira-kira fungsi yang sama diperlukan seperti di pusat perintah. Dan sekarang, berdasarkan platform UgCS, perangkat lunak Drone Dance Controller yang sangat terspesialisasi telah muncul, tetapi ini tidak segera.
Dan bagaimana itu
Lembut Versi pertama, yang saya dan mitra saya uji dalam waktu singkat, menggunakan fungsi standar dari kebanyakan drone sipil, yaitu terbang di sepanjang rute yang diberikan. Rute adalah seperangkat koordinat di mana drone bergerak dalam garis lurus dengan kecepatan tertentu, melakukan sesuatu yang berguna di sepanjang jalan. Untuk sebagian besar tugas yang diselesaikan dengan drone, perencanaan penerbangan seperti itu lebih dari cukup. Tetapi setidaknya tidak ada sinkronisasi waktu di dalamnya, yaitu, sulit untuk memaksa drone berada pada titik tertentu pada waktu yang tepat, yang sangat penting untuk penerbangan grup. Namun, versi pertama adalah versi pertama, agar dapat dengan cepat membangunnya dan mulai terbang. Kami menggambar rute dengan cara standar (tentu saja di UgCS), memuat ke dalam drone - dan maju.
Sinkronisasi penerbangan dilakukan, seperti yang diharapkan, di dahi. Di rute drone, titik diidentifikasi di mana drone berhenti dan menunggu perintah dari darat untuk melanjutkan penerbangan. Kami menyebutnya titik sinkronisasi. Operator di darat harus memastikan bahwa semua drone mencapai titik sinkronisasi, dan mengirimkan mereka perintah "Lanjutkan" untuk melanjutkan penerbangan.
Besi Versi pertama hanya menggunakan rute tipe standar, dan sebagai hasilnya memungkinkan penggunaan drone dari berbagai produsen. Tapi kami segera memutuskan untuk memperbaiki platform target dan melakukan semua tes di atasnya.
Tidak ada drone yang siap untuk pertunjukan pada saat itu. Mereka tidak pada saat penulisan, tetapi ada harapan bahwa mereka akan segera muncul. Sementara itu, Anda harus mengumpulkannya sendiri. Kami merakitnya berdasarkan kerangka 450-mm, dan kami memilih Pixhawk sumber terbuka sebagai autopilot untuk, di satu sisi, membuka ikatan tangan kami, baik dalam perangkat keras maupun dalam firmware. Dan di sisi lain, sehingga pengguna dapat dengan mudah membeli semua komponen yang diperlukan dan merakit produk yang tepat sendiri. Tetapi secara umum, hanya autopilot yang benar-benar diperbaiki. Elemen struktural lainnya bersifat opsional.
Dan poin penting - kami segera mulai fokus pada teknologi GPS RTK. Ini memungkinkan Anda untuk mendapatkan akurasi pemosisian sentimeter relatif terhadap stasiun pangkalan darat (akurasi GPS konvensional 3+ meter).
Ya, GPS RTK merumitkan semuanya, karena memerlukan ketersediaan penerima dengan dukungan GPS RTK di papan masing-masing perangkat, yang Anda perlukan untuk terus mengirim data dari stasiun bumi. Tetapi tidak ada yang harus dilakukan: kami mengerti bahwa kami dan klien kami tidak akan segera mencapai armada besar. Dengan ratusan dan ribuan drone di udara, Anda dapat menggambar angka volumetrik skala besar yang indah di mana posisi setiap drone tidak terlalu penting bagi mata. Dan apa yang bisa digambar dengan puluhan drone? Kemungkinan besar, ini akan menjadi beberapa angka geometris kecil sederhana dan transformasi mereka, yang keakuratan penerbangan sangat penting. Secara kasar, pesawat tak berawak harus bisa berbaris dalam garis lurus, enak dipandang dan tanpa cacat.
Selain itu, drone di Atlanta membawa LED RGB. Pekerjaan mereka dapat dimasukkan ke dalam misi atau mereka dapat dikontrol dari tanah, tetapi pada saat yang sama, beban tambahan pada saluran radio harus diperhitungkan. Namun, alih-alih LED, drone dapat membawa potongan piroteknik, meskipun, tentu saja, Anda harus sangat berhati-hati dengan mereka.
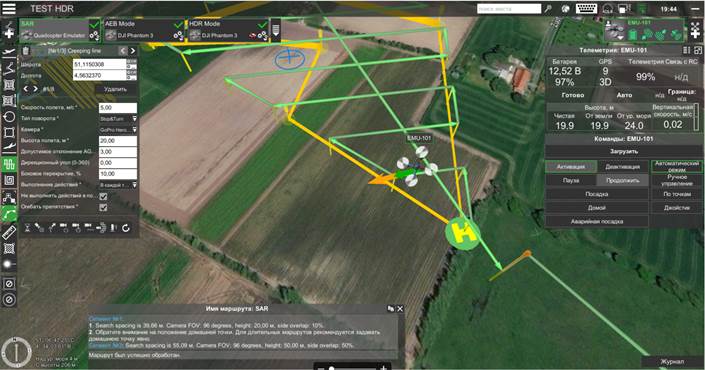
Berikut ini adalah contoh dari salah satu penerbangan pertama pada versi pertama perangkat keras dan lunak (dan hanya dengan teknik kembang api). Garis normal juga terlihat jelas (well, ok, ok. Masih ada sesuatu yang dapat dikerjakan.), Dan sinkronisasi manual. Yaitu, sekitar 40-50 kali selama pertunjukan, operator mengklik "Ayo melangkah lebih jauh", dan kemudian tim berikutnya dikirim ke drone untuk semua orang.
Tetapi sesuatu terjadi sudah terbang.
Dengan demikian, pelanggan terbang musim acara harian.
Bagaimana cara kerjanya sekarang?
Dalam praktiknya, versi pertama diharapkan bukan solusi yang paling sukses. Pertama, keberadaan sinkronisasi manual yang konstan adalah jahat. Perintah Lanjutkan tidak dapat menjangkau drone karena, misalnya, komunikasi radio yang buruk. Dalam hal ini, semua orang akan terbang, dan dia, yang miskin, akan tetap ada. Kedua, tidak mungkin untuk membuat rute yang kompleks, yang mencegah penciptaan lukisan animasi, hanya adegan statis yang mungkin.
Sekarang semuanya menjadi lebih mudah: sekitar setengah tahun yang lalu, vendor merilis versi khusus dari perangkat lunak - Drone Dance Controller, misalnya. Di sini dia menyulap sedikit melalui autopilot dan mengajarinya untuk terbang secara mandiri di sepanjang lintasan yang sewenang-wenang dengan referensi yang jelas ke waktu GPS. Lintasan dapat disiapkan dalam editor 3D atau menggunakan skrip. Operator sekarang diharuskan mengklik tombol "Start" dan berhenti merokok. Outputnya mungkin seperti ini:
Atau ini:
Tapi, sebelum memanjakan paru-paru, tim perlu menyelesaikan tahap penting persiapan untuk pertunjukan.
Jadi, pertama-tama, perlu untuk menyiapkan armada: pastikan bahwa semua drone dalam keadaan mematikan, dikonfigurasi dengan benar, dan tidak ada yang jatuh dari mereka selama transportasi.
Sejalan dengan ini, pertunjukan itu sendiri harus dipersiapkan. Kami mulai dengan animasi yang dapat dilakukan dalam editor 3D, misalnya, di Blender:
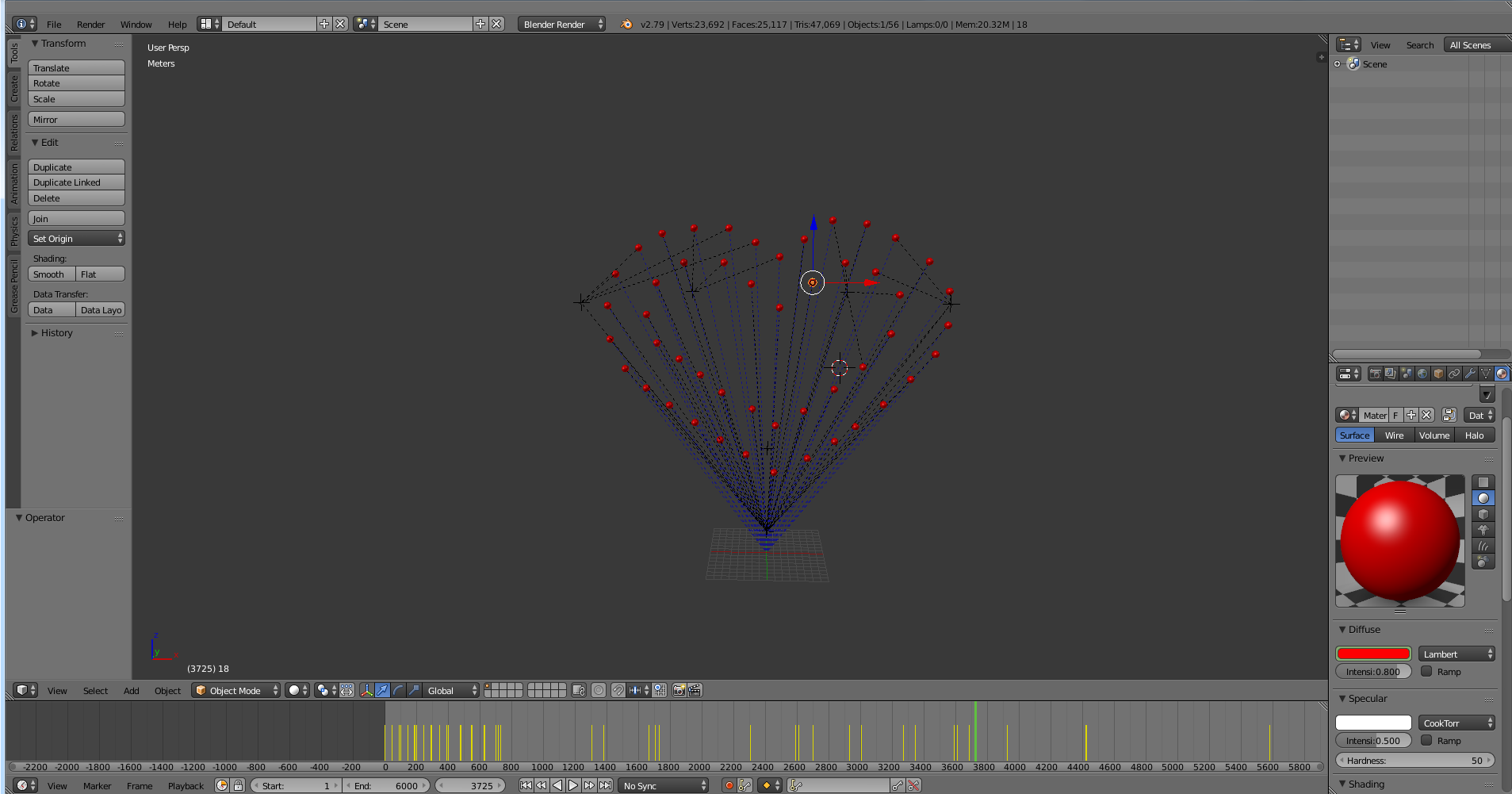
Selanjutnya, kami mengubah lintasan dari animasi ke format yang dapat dimengerti untuk autopilot. Dan, sebelum berangkat untuk terbang ke lapangan, kami dengan hati-hati memeriksa simulator dengan penilaian hasilnya. Simulasi memberi kita kesempatan untuk menempatkan drone virtual dalam koordinat yang diperlukan dan bekerja dengannya pada perangkat lunak kami seperti pada perangkat nyata. Anda dapat mengevaluasi penerbangan mereka secara real time, serta memposting proses mereka dan memvisualisasikan hasilnya dalam beberapa jenis adegan 3D.
Di video - contoh visualisasi dari berbagai sudut pandang.
Titik Pandang: Penampil
Point of View: Peluncuran Pad
Sudut pandang 1
Sudut pandang 2
Setelah itu, kita pergi ke lapangan untuk uji coba. Kami menyebarkan infrastruktur (stasiun darat, komunikasi), mengatur drone. Kami memeriksa bahwa mereka diangkut dengan baik dan semua drone terhubung ke stasiun kami. Selanjutnya, perangkat lunak secara otomatis menentukan drone mana pada rute mana yang harus terbang. Kami mengatur waktu mulai - dan meneruskan.
Dan kemudian - dan pertunjukan itu sendiri.
Tentu saja, tentang "berhenti merokok" - itu hanya lelucon. Karena secara langsung selama penerbangan, operator dan pengamat harus memantau keadaan armada saat ini dan, jika perlu, membuat keputusan tentang pendaratan darurat dari drone yang gagal (dalam segala hal).
Tentu saja ada sejumlah batasan.
Cuaca: kami tidak terbang di hujan dan salju (untuk saat ini), dan kami tidak terlalu suka angin di atas 5 m / s. Jelas bahwa drone akan terbang pada 10 m / s, tetapi akurasi memegang posisi mungkin tidak terlalu baik.
Udara harus relatif bebas pada frekuensi yang digunakan untuk berkomunikasi dengan drone.
Keselamatan: penonton harus dipindahkan agak jauh dari tempat pertunjukan, karena drone, secara umum, dapat jatuh.
Semua ini harus diperhitungkan saat merencanakan.
Total
Anda dapat mengumpulkan segerombolan drone, membeli perangkat lunak UgCS, mendapatkan rekomendasi dari kami dan mulai terbang. Jika Anda sudah memiliki kompetensi tertentu dalam pemuliaan drone, maka semuanya bahkan tidak akan terlalu sulit. Saya tahu orang-orang yang mengangkat tarian tes selama 20 drone 24 jam setelah memperoleh lisensi dan rekomendasi untuk mengimplementasikan perangkat lunak (meskipun mereka sudah memiliki armada). Jika tidak ada kompetensi, tetapi Anda ingin melakukan pertunjukan seperti itu, maka teknisi kami dapat mengimplementasikan proyek seperti itu, melatih spesialis Anda dalam segala hal dan terus mendukungnya. Jika Anda hanya perlu terbang dari pertunjukan satu kali - juga menulis, kami akan membahas.
Referensi