Dalam konteks apaSetelah dimulainya darurat Uni,
Zelenyikot yang terkenal menulis
post- toast yang menginspirasi untuk kesehatan program luar angkasa. Dan inilah komentar yang ditemukan:
Sejumlah besar warga Khabrovsk percaya bahwa pengembangan astronotika terutama adalah pengembangan astronot
berawak . Jadi itu di masa lalu, dan seharusnya di masa depan.
Pada saat yang sama, banyak warga Khabrovsk percaya bahwa program luar angkasa berawak, khususnya pekerjaan kru ISS, sangat merangsang pengembangan teknologi dan sains baru secara umum. Orang-orang di orbit melakukan sesuatu yang cerdas, kompleks, dan sangat, sangat penting. Dan bahkan orang yang lebih pintar lagi bekerja di laboratorium terestrial, menyediakan eksperimen-eksperimen ini: mereka memikirkannya, memproses data berharga yang diperoleh, menciptakan alat presisi yang licik di ambang fiksi ilmiah, yang tanpanya eksperimen ini tidak dapat dilakukan ...
Saya mengusulkan untuk melihat bagaimana semuanya bekerja - pada contoh nyata.

Ringkasan: bermacam-macam, kurang toleransi, nenashi. Dan sedikit tentang perawatan ruang. (+ Mengkritik - tawaran!)
Bagian yang sebenarnya, TTX - Sedikit analisis: apa yang tersembunyi di balik TTX, bagaimana target drone di dalam stasiun orbital, dan apa nasib mereka pada ISS nyata; mengapa ternyata - Dan bagaimana mungkin? Mendaki menjadi fantasi berubah menjadi Tahun Baru1. Ikhtisar Drone1.0. Tempat: ISSMengapa gagasan drone menarik di ISS?
Cukup untuk mengingat kembali klaim utama drone saat digunakan di darat:
- sangat bising;
- waktu penerbangan singkat.
Baik yang pertama dan kedua karena fakta bahwa mesin drone harus berhadapan dengan gravitasi. Mesin dipaksa untuk bekerja di atas ambang batas daya tertentu (jika tidak, drone tidak akan lepas landas). Motor listrik cepat memakan baterai; Gulungan dan sekrup yang dimuat yang mengaduk udara dengan kecepatan tinggi menghasilkan suara yang tajam dan kuat.
Pada ISS, di mana tidak ada gravitasi, mesin dapat bekerja selemah yang mereka inginkan. Anda dapat menggunakan baterai dengan sangat ekonomis; tidak akan ada suara keras.
Apalagi Karena ISS itu sendiri adalah tempat yang sangat bising (ventilasi paksa, banyak rak dengan peralatan yang terus-menerus beroperasi, sistem pendukung kehidupan dan pemeliharaan orientasi stasiun - total konsumsi sekitar 50 kW), drone, dengan operasi mesin moderat, meskipun secara formal membuat suara, tetapi secara praktis tujuannya dapat dianggap diam. Ini tidak akan menjadi gangguan suara yang mengganggu bagi orang-orang di stasiun.
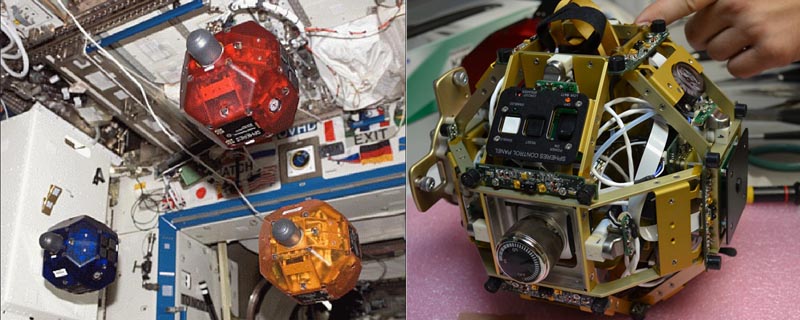
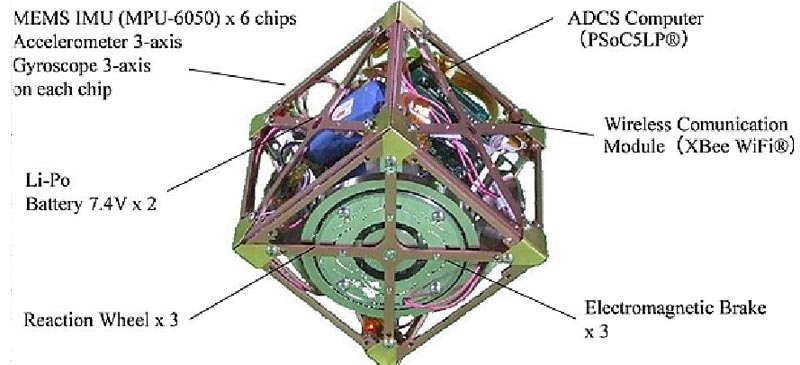
1.1. Spheres (AS)Menurut paspor, dengan permainan akronim: SPHERES (Sinkronisasi Posisi Tahan Melibatkan Orientasi Satelit Eksperimen). Milik NASA. Dibuat di MIT oleh hibah DARPA.
Berat: 4,3 kg.
Ukuran: 22 cm.
 (Sumber bahan grafis: NASA, JAXA, ESA.)
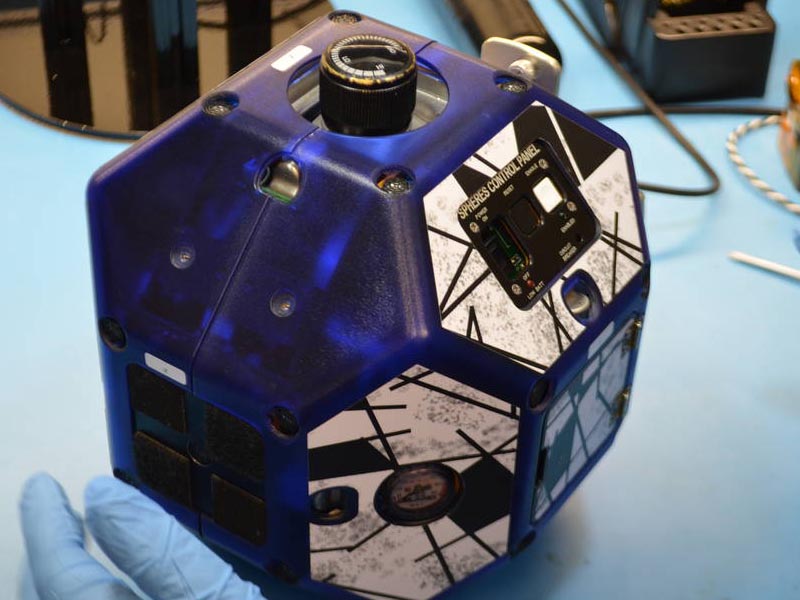
(Sumber bahan grafis: NASA, JAXA, ESA.)Beberapa drone identik, yang tiga jatuh ke orbit: Biru, Merah dan Oranye. First Blue, kembali pada tahun 2006. Beberapa saat kemudian, sisanya, dengan firmware yang ditingkatkan.
Ini bukan drone dalam arti bahwa kita memasukkan "drone" di bumi, yang berarti terutama amatir (quadro) atau profesional (hexo, octo) copters. Bola bukan copters. Mereka tidak memiliki sekrup, tetapi nozel. Propulsi jet murni, gas terkompresi.

Silinder diisi pada 170 g. Dari situ, gas didistribusikan ke 12 nozel. Akselerasi maksimum: 17 cm / s
2 dalam gerakan, 3,5 rad / s
2 dalam rotasi.
Tetapi inilah tepatnya akselerasi maksimum, dalam operasi normal, akselerasi hampir tidak sama. Dalam eksperimen nyata, Spheres bergerak
sangat lambat .
Komunikasi penuh: saluran radio pada frekuensi 868 dan 917 MHz.
Alarm: sinyal inframerah.
Sensor: penerima ultrasonik.
Tidak ada kamera video, tetapi mount disediakan untuk body kit. Pada awalnya, unit VERTIGO digunakan sebagai kamera video, yang dasarnya adalah dua kamera untuk membuat gambar stereo. Lalu, ketika smartphone menyebar, hanya smartphone.

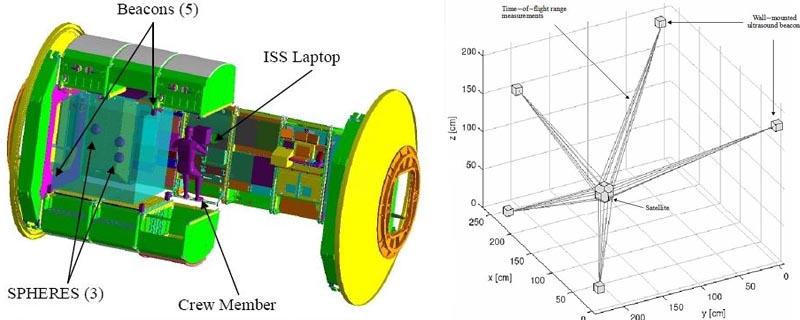
Awalnya, navigasi menggunakan penerima ultrasonik. Ini bahkan bukan sensor jarak, mereka sendiri tidak memancarkan USG. Untuk ini, 5 suar dipasang di laboratorium Amerika. Ketika Anda perlu menentukan posisi Anda, Sphere memberikan flash inframerah. Ini adalah sinyal untuk suar. Mereka bergiliran, dengan penundaan yang berbeda, memberikan sinyal ultrasonik. Bola menangkap kelima sinyal ini. Penundaan awal yang berbeda diperlukan agar sinyal tidak dijamin tumpang tindih, dan analisisnya sesederhana dan seandal mungkin - oleh karena itu, suar bahkan tidak memiliki tanda tangan yang berbeda. Waktu kedatangan sinyal yang sebenarnya memungkinkan Anda untuk menghitung penundaan sekunder yang terkait dengan jarak dari bola ke masing-masing suar.
Segalanya sesederhana mungkin. Mungkin karena siswa mulai berkembang, yang diambil dengan lemah oleh penyelia mereka, mengingat sebuah
episode dari film anak-anak terkenal .
Para pengembang menganggap bagian elektronik dari drone sebagai tempat paling rentan - karena radiasi kosmik. Tetapi drone menghabiskan lebih dari sepuluh tahun di stasiun, dan masalah berjalan dengan sistem distribusi gas ke nozel. Namun, ternyata sudah di tanah, selama perbaikan Blue, diluncurkan pada "Naga".
Gejala serupa, tidak terlalu serius, menyusul Orange, tetapi sejauh ini tetap di stasiun.
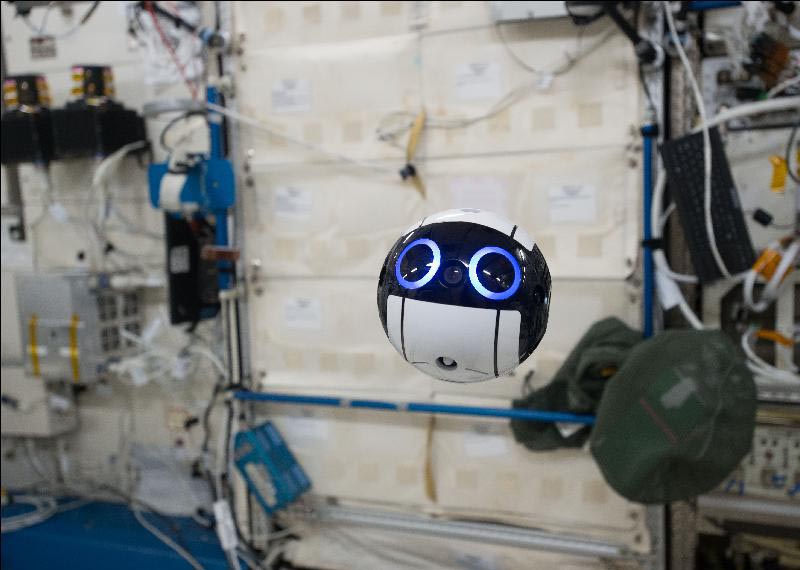
1.2. Ball (Jepang)Int-Ball (Kamera Ball Internal). Properti JAXA.
Berat: 1,4 kg.
Ukuran: 15 cm.
Mimimi terbang ini dikirim ke ISS pada musim panas 2017, tetapi mulai digunakan secara serius hanya setahun kemudian, ketika seorang astronot Jepang berada di stasiun. Namun, secara formal dan sekarang status Ball masih merupakan penyesuaian ulang.
Untuk memindahkannya memiliki 12 lubang kecil. Tetapi untuk rotasi - sudah ada blok gyrodynes.
Ada koneksi nirkabel langsung, tanpa kruk (seperti Spheres) ke laptop stasiun.
Anda mungkin berpikir bahwa ada kamera video di mata, tetapi tidak.
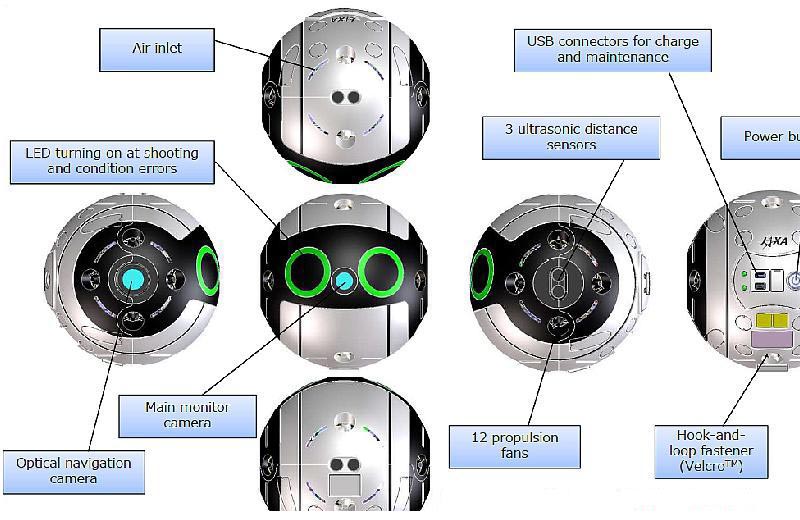
Camcorder rumah di hidung. Mata hanyalah indikator. Mereka sebenarnya abu-abu. Ketika mereka menyala biru - ini adalah sinyal bahwa kamera utama berfungsi. Jika terjadi kegagalan sistem, mereka berubah merah, dan pandangan Bola menjadi agresif secara tak terduga.

Sepeda sudah berjalan, bahwa untuk pertama kalinya, Bola takut astronot Amerika yang tidak mengharapkan hal seperti itu.
Dari sisi kanan ada kamera tambahan, navigasi. Baginya, dua spidol diletakkan di laboratorium Jepang (bercak merah muda vyrviglazno-pink). Biasanya mereka berada di ujung modul yang berbeda, satu di bawah ambang batas, yang lain di sampul mini-gateway, tetapi dapat dipindahkan dengan bebas.
Di sisi kiri bola adalah sensor jarak ultrasonik.
Sehubungan dengan masalah modis, ditekankan bahwa bagian tubuh dicetak pada printer. (Dan kemudian mereka dipoles dan dipoles untuk waktu yang lama, mukjizat tidak terjadi.)
Dalam mode offline, bola belum berfungsi. Pergerakannya dikendalikan oleh dua operator di MCC Jepang.
Sekali sebulan,
buku harian video diperbarui.
1.3. Simon (Eropa, lebih khusus Jerman)CIMON (Kru pendamping Mobile Interaktif), untuk menghormati
Prof. Simon Wright . Di bawah naungan ESA, dibuat oleh Pusat Penerbangan dan Antariksa Jerman di fasilitas Airbus Jerman, dengan partisipasi IBM.
Berat: 5 kg.
Ukuran: 32 cm.

Dikirim ke ISS "Dragon" musim panas ini.
Uraian terperinci belum dikirim, hanya ada data yang paling umum: 14 sekrup. Di hidung ada monitor dan kamera video, di sisi ada dua yang lebih.

Sistem Linux. IBM membuat versi portabel
Watson , yang tidak memerlukan lusinan server atau koneksi darat.
Jika tiba-tiba Anda memutuskan bahwa drone adalah sesuatu "dengan AI dari IBM!" mereka dapat bermanuver secara normal, dan sekarang akhirnya
terlihat setidaknya sedikit
keren - di sini adalah
tembakannya di slide udara . Pada tes pertama, ternyata kemampuan berhitungnya untuk bermanuver lebih lemah daripada sisa-sisa non-inersia di laboratorium terbang Eropa (dengan bangga disebut ZERO-G).
Direncanakan pada bulan Oktober, Alexander Gerst Jerman akan mulai bekerja dengannya, pengenalan suara dan wajah dipenjara untuknya. Dan di musim dingin, Simon akan diturunkan kembali ke tanah. Tetapi, tampaknya karena
infeksi stasiun dengan gremlin jahat , tenggat waktu telah bergerak. Anda dapat mengetahui tentang awalnya di
twitter Gerst .
2. AnalisisNah, mengapa pesawat tanpa awak di ISS?
Ada pernyataan seremonial oleh pencipta, ada rilis pers agensi, tetapi jelas bahwa sebagian besar ini semua adalah pembicaraan birokratis, di mana prospek membengkak seperti katak melalui pipa, dan pertanyaan tidak nyaman terlihat di bawah karpet.
2.1. Untuk Apa Spheres?Pertama-tama, mari kita coba memahami: apakah desainnya masuk akal?
Ada udara di dalam ISS. Tetapi penggerak Spheres menggunakan prinsip reaktif murni. Ini berarti bahwa ketika drone berjalan, ada sumber daya yang terus-menerus terbuang. Pertanyaan logisnya adalah: bagaimana sumber daya ini diisi kembali? Mungkin Anda bisa mengisi bahan bakar drone langsung ke ISS (yaitu, dari sudut pandang praktis, tidak ada sumber daya yang terbuang)? Mungkin beberapa kompresor dikirim ke ISS bersama dengan drone? Tidak. Drone menggunakan silinder yang dapat dipertukarkan dengan karbon dioksida cair. Setelah digunakan dalam drone, mereka harus diturunkan ke tanah, diisi bahan bakar di sana, dan diangkat ke ISS lagi.
Selain itu, bahkan daya listrik drone tidak ada pada baterai, yang akan tampak jelas, tetapi pada baterai. Baterai AA sekali pakai, masing-masing dua 8-bungkus. Ubah menjadi segar setiap kali sebelum digunakan, kira-kira harus cukup untuk 2 jam. Setelah itu mereka hanya dapat dikirim ke tanah, dan drone membutuhkan yang baru.
Bagaimana keputusan aneh seperti itu bisa dibenarkan?
Mungkin idenya adalah bahwa meskipun drone akan bekerja di dalam ISS, itu mensimulasikan gerakan di luarnya, di ruang hampa udara? Di mana tidak ada udara? Atau bahkan mungkin dimaksudkan jika depresurisasi ISS terjadi? Kemudian dia bisa bergerak ke dalam stasiun dalam ruang hampa udara, seperti halnya pesawat tanpa awak dengan sekrup. Itu mungkin berguna. Cara biasa untuk menemukan kebocoran adalah dengan suara, tetapi metode ini hanya berfungsi jika kebocorannya kecil dan udara keluar perlahan.
Tetapi pencipta sendiri mengatakan bahwa drone tidak dimaksudkan untuk digunakan dalam ruang hampa.
Lalu, mungkin, kita akan menemukan alasan dalam percobaan di mana drone ini digunakan?
Eksperimen dering
Dua Spheres, untuk masing-masing ditambahkan body kit dengan induktor (Cincin). Dalam bentuk ini, drone dapat berinteraksi secara magnetis - saling tolak, menarik, dan saling memutar. Isi ulang satu sama lain tanpa kontak.
Apa idenya. Alasan terselesaikannya sebagian besar misi ruang angkasa (berhasil!) Adalah karena bahan bakar habis. Perangkat ini menjalankan program dasarnya, dan masih berfungsi dengan sempurna, dapat berfungsi dan masih berfungsi - hanya saja tidak ada bahan bakar lagi di engine. Tidak mungkin untuk memperbaiki jalur penerbangan lebih lanjut. Lebih buruk lagi, tidak mungkin untuk membongkar gyrodines, dan perangkat tidak dapat lagi mempertahankan orientasi antena ke tanah dan panel ke matahari - koneksi ke tanah, listrik hilang ... Apakah mungkin untuk melakukan tanpa konsumsi propelan secara teratur? Jika Anda menempatkan beberapa "cincin" ini (misalnya, pada permukaan ISS), maka di antara mereka Anda dapat menggerakkan satelit kecil sebanyak yang Anda suka tanpa menghabiskan bahan bakar sama sekali - daya yang cukup, yang biasanya tidak menjadi masalah.
Pada tingkat kata-kata umum, ini semua lucu. Tetapi sulit untuk membayangkan kasus penggunaan nyata - di mana dan untuk tujuan praktis apa ini diperlukan?
Selain itu, percobaan itu sendiri, dalam bentuk di mana ia dilakukan, sama sekali tidak berguna, jadi hal-hal dasar dilakukan di dalamnya.
Apa yang diberikannya? Untuk apa itu?
Eksperimen vertigoSejak 2008, proposal dan upaya untuk memutakhirkan Spheres dimulai sehingga navigasi mereka tidak didasarkan pada suar, tetapi pada analisis video. Pada 2010, proyek mengambil DARPA yang sama untuk pembiayaan, termasuk poin-poin ini untuk drone. Tampaknya ide yang jelas dan berguna adalah bekerja dalam versi tiga dimensi dengan fakta bahwa prototipe autopilot mobil sekarang sedang dibuat dalam versi dua dimensi. Apalagi dilakukan sebelum topik ini menjadi booming.
Tapi ini di satu sisi. Di sisi lain, implementasi drone dalam bentuk Sphere paling tidak cocok untuk ini.
Bahkan jika Anda menutup mata terhadap kenyataan bahwa Spheres sangat lambat, bagaimana dengan fakta bahwa awal penerbangan membutuhkan waktu manusia (periksa tekanan dalam silinder dan ganti jika perlu; ganti kemasan baterai dengan yang baru), dan jam penerbangan sangat terbatas (sering penggantian silinder dan baterai, dan dengan pengiriman dari tanah)?
"Eksperimen" Halo
Dalam tanda kutip, karena proyeknya adalah bahwa bumper dipasang pada drone, di mana Anda dapat menggantung apa pun.
Mungkin akan masuk akal - jika drone dapat digunakan sebagai inspektur drone biasa setidaknya di dalam stasiun. Tapi Spheres tidak bisa digunakan seperti itu, bukan TTX. Jadi mengapa begitu?
Tapi untuk apa. Sebagai contoh, "unit docking" digantung di body kit, dan drone merapat satu sama lain. Bukankah ini sebuah keajaiban?
Atau ini yang lain: dua drone diikat dengan tali, dan menyaksikan bagaimana satu dapat menarik yang lain. Dan ternyata ini adalah tiruan dari penangkapan puing-puing luar angkasa. Luar biasa! Bukan begitu?
Percobaan Percikan (Aduk)
Untuk balok khusus terpasang: di ujungnya ada dua bola, dan di tengah ada balon transparan sebagian diisi dengan cairan.
Bola digunakan untuk memuntir, mengguncang, berosilasi, dll. Kamera di sebelah silinder melepas apa yang terjadi di dalamnya. Tingkat pengisian yang berbeda digunakan, dan cairan dengan sifat yang berbeda.
Jelas bahwa, pertama-tama, ini adalah analogi tentang apa yang bisa terjadi dalam tangki dengan bahan bakar ketika mereka berada dalam keadaan mendekati gravitasi nol. Oleh karena itu, percobaan ini berlangsung dengan partisipasi dari produsen besar nyata.
Secara umum, percobaan ini terlihat paling meyakinkan dari semua yang lain. Apa yang membuat kami menggunakan reservasi? Desain dengan rocker dan Spheres sebagai akseleratornya adalah hal yang sangat canggung. Karya para penggerak Spheres, terutama dengan berlalunya waktu, jauh dari presisi. Penggunaan Spheres sebagai bagian dari pemasangan memberlakukan pembatasan ketat pada durasi percobaan, tidak mungkin untuk melakukan mereka untuk waktu yang lama dan dalam mode otomatis (sesi dengan Spheres - beberapa jam dalam beberapa minggu). Tampaknya jika ada minat nyata dalam eksperimen semacam itu, tempat di rak akan dialokasikan, dan pengocok-alat kecil akan dipasang di sana, dipertajam untuk eksperimen semacam itu. Dan jika tidak ada tempat di rak, maka bahkan: apakah tidak lebih masuk akal untuk membuat bingkai dengan gyrodine di sekitar silinder daripada untuk menempelkan ujung panjang yang menggantung Spheres, agak tebal, tetapi lemah dan tidak akurat dalam hal percepatan yang dibuat?
Yaitu, keraguan tentang perlunya Spheres untuk eksperimen semacam itu tetap ada. Dan mereka didukung oleh kenyataan bahwa semua model drone berikut belum pernah dicoba untuk hal seperti ini.
Jadi mengapa Spheres dibutuhkan?Biarkan siswa bereksperimen - apakah pengalaman dan minat mereka pergi ke ruang angkasa lebih penting daripada manfaat nyata dari Spheres spesifik pada ISS?
Atau, terjun ke teologi konspirasi yang lengket, justru sebaliknya: DARPA mendanai proyek ini untuk membingungkan militer Rusia dan Cina yang gagah berani? Seperti, lihat, inspektur satelit prototipe tak berdaya apa yang datang bersama kita ... Jika kita memiliki inspektur satelit yang keren, akankah kita membiayai pelukan dan tangisan seperti itu? Kami tidak memiliki inspektur satelit!
Atau apakah birokrat tambahan di NASA dan DARPA, yang tidak ada gunanya, dipaksa untuk menciptakan penampilan kerja untuk membenarkan keberadaan mereka? Apakah ini semua hanya "penguasaan" dana? Dan pada saat yang sama, pengisian resmi jadwal kerja para astronot adalah "tidak sia-sia kita membawa mereka ke sana dan kembali"?
2.1. Kenapa kita butuh bola?Di sini tujuannya dinyatakan dengan segera, sangat jelas dan sangat meyakinkan.
Mari kita lihat bagaimana percobaan dengan orang-orang di ISS diatur.
Seorang pria, masih di bumi, mengajarkan rencana kerja, melatih. Tapi! Karena orang-orang ditinggalkan di ISS selama enam bulan, dan ada beberapa di antaranya, tidak mungkin untuk membuat astronot idealnya siap untuk setiap eksperimennya, dan melakukannya dengan keterampilan seorang asisten laboratorium yang telah bekerja dengan peralatan seperti itu selama bertahun-tahun. Tetapi sebuah eksperimen diperlukan lebih atau kurang cepat, tidak membosankan, ada jadwal. Karenanya, hampir setiap percobaan berada di bawah pengawasan MCC. Astronot memasang kamera di braket, mengarah ke tempat di mana ia akan bekerja. Dan MCC tidak hanya dapat menjawab pertanyaannya - tetapi juga segera memperbaiki jika dia sudah melakukan sesuatu yang salah, tidak memperhatikannya sendiri.
Tentu saja, kamera stasioner pada braket bukan pilihan ideal. Terkadang Anda ingin menampilkan gambar dari dekat - apa yang ada di bawah jarinya. Terkadang ini sangat penting. Eksperimen dapat ditunda atau dibatalkan, tetapi dalam kasus pencegahan atau perbaikan sistem pendukung kehidupan tidak ada tempat untuk pergi, dan kesalahan dapat menyebabkan kesulitan besar. Karena itu, Anda harus memanggil seseorang dari kru untuk meminta bantuan: yang satu bekerja, yang lain memegang kamera, lepas landas dari bahunya.
Klaim Jepang bahwa ribut-ribut dengan kamera memakan waktu hingga 10% dari waktu.
Di sini, tentu saja, tidak sepenuhnya jelas apakah pernyataan ini tidak licik - mereka menganggap waktu para astronot di dalam pekerja, atau termasuk semua yang mereka bisa: astronot di waktu luang mereka suka memotret di jendela; itu dianggap sebagai bentuk yang baik bagi semua orang untuk merekam tur video stasiun mereka, setidaknya sekali per ekspedisi; Anda perlu mempertahankan vlogs dan berpartisipasi dalam jembatan video, karena ini diperlukan untuk mempopulerkan / karena alasan politik dan gambar. Jadi dalam kenyataannya, persentase waktu mungkin berbeda.
Tapi ini tidak mengubah esensi: mengapa tidak membebaskan kali ini untuk sesuatu yang sangat berguna?
Bola dinyatakan sebagai kamera penggerak universal, yang seharusnya menghemat waktu ini.
Apakah drone bekerja seperti ini dalam kenyataan?Gambar yang cukup biasa-biasa saja berasal dari Bola (jika dibandingkan dengan kamera penuh dengan lensa bagus yang dipasang pada ISS ke kurung). Dan gambar apa lagi yang bisa berasal dari kamera saku dengan lensa mungil?
Mobilitas bahkan lebih buruk. Batasan main-main Sharik jelas terkait dengan reasuransi, kekuatan sekrup diremehkan secara khusus. Ini dapat diubah di masa mendatang jika bagian perangkat lunak (navigasi dan manuver gambar) dapat diandalkan dan efisien. Tapi ini hanya masalah besar. Jika kita menggunakan teknologi "terestrial" yang serupa sebagai titik awal - apa yang dilakukan di bidang autopilot mobil - tampaknya para spesialis dan pengembangan ini tidak terlibat, dan di JAXA semuanya dilakukan dari awal, hampir oleh para pemula di bidang ini.
Namun, masalah terbesar bukan itu. Misalkan Bola mampu mengenali lingkungan dengan percaya diri, dan secara akurat bermanuver di dalamnya. Apakah ini cukup bagi drone untuk menjadi asisten operator - seperti, misalnya, anggota kru lain dengan kamera?Pemilik drone sangat menyadari jawabannya. Autopilot berkinerja baik ketika diberikan tugas yang jelas: pos pemeriksaan lintasan dimasukkan, atau objek utama diatur. Dalam kasus mobil, kasus penggunaan semacam itu cukup nyaman. Dalam kasus drone, diperlukan lebih banyak - interaksi dengan operator saat tugas penerbangan disempurnakan, termasuk kondisi pendaratan yang tidak ditentukan sebelumnya (ingat semua yang lucu, melalui air mata, kisah drone yang tidak diberikan kepada pemilik).Untuk asisten drone di ISS (asisten dalam kenyataan, bukan siaran pers), itu terutama akan memerlukan interaksi dengan seseorang. Interaksi yang nyaman . Tidak dangkal, pada tingkat perintah verbal yang jelas atau gerakan yang ditentukan secara formal seperti pengontrol lalu lintas. Dan seperti yang terjadi dalam kasus dua orang sungguhan melakukan sesuatu bersama. Anda meramalkan tindakan dan niat orang lain pada awal gerakan, sesuai dengan arah tatapan diarahkan, sebagai tatanan yang membesarkan hati, hanya ada pandangan sekilas, dan reaksi meniru perilaku lainnya, jelas dalam situasi nyata, dan sangat sulit untuk diformalkan.Tetapi agar ini menjadi kenyataan, drone harus dilengkapi dengan AI yang sangat cerdas - tidak hanya mampu bermanuver, tetapi juga memahami apa yang terjadi. Jika tidak, penggunaannya tidak akan membantu, tetapi tugas sulit lain yang harus diingat astronot agar sejalan dengan pekerjaan utama. Hanya akan ada kelebihan beban, iritasi, kesalahan.Perkembangan interaksi seperti ini sekarang dalam masa pertumbuhan, terutama karena dalam keadaan ini perkembangan AI yang kuat. Tanpa membuat AI yang kuat, tugas ini mungkin, paling banter, solusi ersatz mirip dengan penerjemah otomatis saat ini - sebuah interlinear dengan kesalahan yang perlu dikoreksi oleh AI yang kuat dalam bentuk seseorang. Tanpa AI yang kuat, asisten drone perlu terus-menerus dipantau dengan satu atau lain cara - dan secara teratur campur tangan dalam tindakannya! - operator di darat.2.3. Dan inilah Simon!Rupanya, para pengembang Simon memahami hal ini. Mereka juga memahami bahwa dari sudut pandang ekonomi, skema yang digunakan oleh Jepang dengan Sharik - setidaknya dua spesialis yang dipekerjakan secara permanen di bumi untuk menghemat 10% dari waktu satu kosmonot - paling tidak bash.Karena itu, tujuan lain dinyatakan.Simon dengan sederhana akan mengikuti pemiliknya, menjadi asisten suaranya, dan mengumpulkan data untuk analisis psikologis kondisi kru.Yaitu. Diusulkan untuk mengambil teknologi yang sudah diterapkan di drone bumi. Lalu berikan astronot di orbit asisten suara artifisial (baca, bisu) - ketika astronot di headset-nya sudah memiliki asisten langsung di MCC. Dan seperti ceri, buat versi pasif dari apa yang dilakukan di bumi dalam bentuk aktif, menggunakan metode yang jauh lebih canggih dalam proyek-proyek seperti "Mars 500". Jika ini bukan langkah besar bagi semua umat manusia, lalu apa itu?Terlepas dari semua ini, Simon masih bisa menjadi keuntungan nyata. Hanya tidak terkait dengan semua hal di atas, tidak jelas bagi penyusun siaran pers.2.4. Perawatan ruang angkasaJika Anda menonton video dari ISS dengan cermat, memperhatikan perilaku astronot, Anda akan melihat hal yang lucu - sama sekali tidak jelas sebelumnya, bahkan jika Anda mengenal fisika dengan baik dan memahami apa itu bobot.Fakta empiris: lebih mudah bagi seseorang dengan gravitasi nol untuk menangani hal-hal besar yang besar daripada yang kecil dan ringan.Kesulitan dimulai ketika Anda melepaskan hal kecil.Tampaknya, apa masalahnya?
Nah, "letakkan" sesuatu di udara, dan itu akan menggantung di sana. Gravitasi nol! Bukankah itu lebih nyaman daripada di bumi, di mana sesuatu bisa jatuh, dan sebelum Anda melepaskan sesuatu, Anda perlu mencari beberapa dukungan yang dapat diandalkan untuk meletakkannya?Masalahnya adalah bahwa seseorang tidak dapat "meletakkan" sesuatu di udara dengan akurasi yang cukup. Di bumi, kita terbiasa meletakkan benda-benda di permukaan yang berbeda, tetapi selalu dengan gravitasi. Dia melepaskan - dan gaya gravitasi mendorong ke permukaan, dan gaya gesekan tidak memungkinkan untuk bergerak ke samping. Ada ilusi bahwa seseorang sendiri dapat meninggalkan semuanya dengan tenang karena ia secara ideal mengendalikan gerakannya dan menerapkan kekuatan.Dalam gravitasi nol, ilusi ini dengan cepat dihilangkan. Ternyata jika seseorang ingin "meletakkan" sesuatu di udara, ketika dia meletakkannya di atas meja, ini tidak berfungsi lagi.Bahkan jika seseorang berusaha sangat keras untuk membiarkan subjek tidak bergerak di udara, melepaskan dan menarik tangannya dengan sangat hati-hati, subjek masih akan bergerak dengan kecepatan sisa yang kecil. Dan jika seseorang melepaskan hal kecil seperti berjalan, tanpa banyak perhatian ... Sekilas, kecepatan sesuatu tidak begitu signifikan. Tapi itu konstan, dan itu tidak akan pergi ke mana pun. Dan hanya dalam beberapa detik ternyata benda itu melampaui batas yang bisa dijangkau astronot, hanya dengan mengulurkan tangannya. Dan beberapa solusi diperlukan. Baik biarkan benda itu pergi, tetapi kemudian Anda harus terbang di belakangnya dengan seluruh tubuh Anda, dan tidak hanya menggerakkan tangan Anda, atau Anda perlu mengambilnya sekarang dan membawanya kembali. (Misalnya, merawat tablet - perhatian bukan pada wajah pembicara, tetapi pada tangannya.)Yang terbaik adalah bertahan dan tidak melepaskan lagi. Tetapi apakah Anda ingin berinteraksi dengan beberapa objek secara bersamaan?Anda tidak dapat membiarkan salah satu item menggantung selama lebih dari beberapa detik. Anda harus terus-menerus kembali ke subjek ini dan “menggesernya”, melayang pergi, kembali.Dan jika item tersebut adalah tablet, pada layar yang Anda tonton sesuatu, dan kameranya akan menembak Anda, masalahnya diperparah oleh fakta bahwa selain kecepatan residual, ada juga kecepatan rotasi residu. Tablet ini tidak hanya akan perlahan-lahan melayang, tetapi juga perlahan-lahan berpaling dari Anda.Semua ini mengarah pada fakta bahwa para astronot memegang dengan tangan mereka apa yang mereka kerjakan atau terlibat dalam perawatan ruang angkasa - mereka terus-menerus memperbaiki benda yang menggantung di udara.Banyak penggemar astronot, bahkan setelah menonton cukup banyak iklan ISS, tidak memerhatikan: hampir semua barang di stasiun itu memiliki stiker lengket-lengket. Dan potongan-potongan ibu Velcro di sana-sini di "meja", "meja kerja", dinding stasiun, beberapa modul tertutup seluruhnya dengannya. Selain Velcro, ada kantong jala karet di stasiun sana-sini. Dan sesuatu menempel pada carabiner. Untuk braket laptop dan kamera. Semua ini untuk tujuan yang sama - entah bagaimana menyelesaikan masalah perawatan ruang.Dan dalam pengertian ini, Simon memiliki fungsi berguna yang unik: dapat digunakan sebagai layar yang dapat "diletakkan" di udara. Selanjutnya, Simon sendiri akan memegang posisi dan arah layar (dan kamera) pada astronot. Dia tidak perlu perawatan.Pertanyaannya adalah, apakah layak mengirimkan objek yang berat dan berat untuk ini - dan bukan pesawat tak berawak kecil yang Anda bisa lampirkan tablet?2.5 Masalah utama drone pada ISSDrone tidak diperlukan pada ISS - tidak ada masalah bagi mereka.Lebih tepatnya, tugas dapat ditemukan untuk mereka, tetapi untuk menyelesaikan masalah ini, drone tidak boleh menjadi mainan dari jenis "kami menjejali segala sesuatu yang modis, tetapi itu baik untuk sesuatu", tetapi dipenjara karena fungsi tertentu.3. Drone yang indah di masa depanDari tugas nyata yang pada prinsipnya drone dapat berguna pada ISS, sekarang ada dua:1. Tembak karya para astronot,2. Selamatkan orang-orang dari perawatan luar angkasa.Jika Anda mencari solusikhusus untuk tugas-tugas ini sekarang - Anda perlu menggunakan sesuatu yang dapat bekerja sekarang , dan bekerja secara efisien, sepenuhnya menyelesaikan tujuan yang dinyatakan. Dan jangan melakukan sesuatu yang cadel, dibenarkan oleh fakta bahwa "kami sedang mengembangkan pendekatan teknologi sehingga suatu hari nanti ..."3.1. Tawaran rasionalSekarang dan dalam waktu dekat, drone pada ISS seharusnya tidak :- sangat bergantung pada permulaan AI (karena mereka terlalu awal);- menggunakan pengenalan sinyal video untuk navigasi (tidak dibebani sampai habis, dan berlebihan di lingkungan tertutup di mana semuanya dikontrol);- untuk membebani desain dengan analog yang tidak berguna dari perangkat khusus yang sudah tersedia di ISS dalam kualitas terbaik (tidak ada kamera built-in, tidak ada tablet built-in, tidak ada prosesor di luar pengontrol perangkat minimum).Drone seharusnya hanya alat kerja yang sebenarnya - unit gyrodyn, kipas, baterai, nirkabel, dan itu saja. (Maksimum masih beberapa kamera terkecil dari jenis smartphone, dan hanya agar aliran video mereka ditransfer melalui gambar ke unit prosesor di rak, pemrosesan hanya ada di sana.) Selain itu, semua detail sekecil mungkin. Jika drone sebelumnya memiliki dimensi pedang bola basket, bola tangan, dan bola pantai kecil, maka drone ISS yang ideal harus jauh lebih kecil, berjuang untuk ukuran bola tenis.Itu adalah:Kapasitas prosesor dipindahkan ke salah satu rak ilmiah sehingga drone tidak membawa beban ekstra besar ini (jangan lupa bahwa selain modul komputasi itu sendiri, drone juga dipaksa untuk membawa daya untuk modul ini!).Untuk navigasi, gunakan skema Sphere asli, tetapi dalam bentuk terbalik : drone itu sendiri memberikan sinyal seperti dua suar (dari sisi kanan dan sisi port), sinyal ini dibaca oleh detektor yang dipasang di sudut-sudut modul stasiun dan ditriangulasi oleh penundaan; bersama dengan data internal drone - sensor akselerasi, pengoperasian motor listrik dan cincin gyrodinamik - ini cukup untuk menentukan posisi drone dan orientasinya, serta turunannya.Dalam merencanakan rute, model lingkungan siap pakai digunakan (ISS adalah objek besar, tetapi cukup terlihat), ditandai dengan pena, dan diperbarui jika perlu oleh operator, tanpa bermain dalam pengenalan pola dari sinyal video. Untuk mengontrol lingkungan, gambar digunakan dengan kamera terpasang (bukan pada drone) dalam modul di mana drone sekarang - dan kontrol ini dilakukan oleh operator. Jika algoritma neural digunakan, itu hanya untuk menyelesaikan tugas bantu tingkat rendah yang sudah cukup baik.Drone itu sendiri memproses informasi seminimal mungkin. Itu hanya membuang data internalnya ke komputer di rak, dan darinya menerima instruksi spesifik untuk pengoperasian peralatan.Ada titik pemasangan pada drone. Heterogen. Ini adalah kait yang dioperasikan secara elektrik (bagian pelengkap dari kait melekat pada objek yang harus digunakan drone), dan hanya sepotong ibu-Velcro yang merupakan standar untuk stasiun (dalam gravitasi nol ini cukup untuk menghubungkan drone bahkan dengan objek yang agak masif). Dalam hal apa pun, ini harus menjadi dudukan minimum, jauh lebih kecil daripada bumper besar yang berlebihan dari Spheres.Ketika video astronot yang bekerja diperlukan, kamera video diikat ke drone - kamera besar / kamera penuh waktu, yang ada di ISS. Drone perlahan-lahan menariknya dan memutarnya ketika MCC perlu mengubah sudut pengamatan tempat kerja kosmonot. Manuver yang diperlukan dihitung di darat / di komputer rack-mount, drone itu sendiri hanya menerima pesanan dasar untuk mesin.Sehingga bagi astronot itu akan sangat melegakan, dan bukan sakit kepala yang tidak perlu, di rak ilmiah di mana ruang dialokasikan untuk unit prosesor drone, ruang untuk doknya juga harus dialokasikan - sehingga parkir dan pengisian ulang, seperti yang telah lama dilakukan dalam penyedot debu. Dan lebih baik drone tidak sendirian, tetapi dengan kemampuan untuk bekerja dengan komidi putar: dari sudut pandang astronot, drone terlihat pernah diisi, hanya kadang-kadang salinan muncul di sebelah drone yang berfungsi, di antara mereka ada transfer (otomatis) dari barang yang ditarik, setelah itu drone yang dihabiskan dihapus untuk diisi ulang. .Selain bekerja sebagai videografer, desain yang serupa akan memungkinkan untuk menggunakan drone untuk memerangi perawatan.Seperti kamera, drone dapat memegang posisi dan orientasi smartphone / tablet yang terpasang padanya; tarik layar ini di belakang tuan rumah; mengkompensasi mundur ketika astronot menusuk layar tablet tanpa memegangnya dengan teman lain. Atau, selama pekerjaan perbaikan, "simpan" tas kerja / "meja" kecil di udara, dengan Velcro dan magnet untuk barang-barang kecil dan pengencang, di sebelah astronot sesuai keinginannya - menghilangkan kebutuhan untuk meluruskan tas yang kusut setiap kali, atau menghapus hal yang diperlukan dengan carabiner di sabuk, dan kemudian kencangkan di sana, dll.Artinya, itu hanya akan menjadi pengekang universal di udara untuk hal-hal lain. Bukan pembawa untuk beberapa "instrumen ilmiah" abstrak, tetapi untuk benda-benda yang benar-benar dan terus-menerus digunakan di stasiun dalam kehidupan sehari-hari.Dan dengan pengembangan lebih lanjut dari pendekatan ini:Lebih baik untuk membayangkan bahkan tidak ada beberapa drone yang bekerja secara bergiliran dengan satu hal di dekat salah satu astronot, tetapi segerombolan mereka di stasiun bekerja sebagai korsel. Beberapa contoh selalu terletak di setiap modul stasiun, siap untuk bertindak tanpa prosedur inisialisasi khusus. Di latar belakang, mereka mulai mendorong, sehingga mereka akan membeku dan tidak berputar, benda-benda di sebelah astronot, jika benda-benda ini dilepaskan dari tangan, tetapi tidak menempel di dinding dengan Velcro / tidak dinyatakan tetap, dan perhatian orang tersebut jelas didistribusikan di antara beberapa benda tersebut.3.2. Apa selanjutnya - dalam kenyataan?Urutan di mana drone muncul di ISS dalam miniatur mencerminkan tingkat perkembangan teknologi negara. Pemimpin melakukan sesuatu, maka yang lain yang mampu bersaing ditarik: pertama, Amerika Serikat, kemudian, dengan margin yang luas, Jepang, Jerman ...Jelas bahwa Rusia tidak boleh diharapkan bahkan dalam perlombaan miniatur ini.Lalu ternyata sekarang giliran AS lagi? Dengan mempertimbangkan pengalaman mereka, melihat upaya para mitra, haruskah NASA sekarang membawa lomba ini ke tahap teknologi baru?Rupanya, ada sesuatu yang benar-benar direncanakan di sana perlahan. Setidaknya NASA sedang melakukan semacam brainstorming, mengumumkan kompetisi publik di berbagai hackathon.Sayangnya, solusi yang ditawarkan di kompetisi tersebut dimanjakan oleh stereotip yang salah tentang kondisi, masalah, dan tugas ISS. Konsep dibuat dengan tekun, tetapi tanpa berpikir, pada prinsip "mari kita buta semua yang kita bisa menjadi drone dan tiba-tiba itu akan berguna untuk sesuatu?", Ini adalah contoh khas .