Tidak mungkin membayangkan dunia fiksi ilmiah masa depan tanpa robot. Apakah itu android dari alam semesta Alien, mesin robot antropomorfik dari Transformers, anjing robot bernama Axel atau robot pembunuh besar ED-209 dalam film Robocop, yang terlihat seperti ayam bagi banyak pemirsa. Tapi kesamaan apa yang mereka miliki? Selain kekuatan, kecepatan, daya tahan dan fitur fisik lainnya? Kecerdasan Dan apakah kecerdasan itu? Kemampuan untuk berpikir, menganalisis data, dan membuat keputusan, jika kita berbicara secara berlebihan. Hari ini kita akan berkenalan dengan robot modular pertama di dunia, yang mampu menganalisis situasi di lapangan, dibangun kembali untuk mencapai tugas. Bagaimana para ilmuwan berhasil mengajarkan robot untuk berpikir cepat dan membuat keputusan yang tepat, bagaimana cara kerja robot ini dan seberapa baik? Kelompok riset menjelaskan semua ini dalam laporannya, yang akan kita bahas. Ayo pergi.
Dasar YayasanUntuk memulai, ada baiknya berbicara sedikit tentang seperti apa robot yang diuji. Ini tidak biasa, fitur desainnya diungkapkan dalam namanya sendiri - robot yang dapat dikonfigurasi ulang secara modular (MSRR). Kata "robot" jelas bagi kita semua. Mari kita cari tahu apa arti dua yang pertama. Modular: robot ini terdiri dari modul, yang pada dasarnya adalah robot independen. Dengan menggabungkan modul-modul ini, Anda bisa mendapatkan desain kompleksitas apa pun (praktis), tergantung pada tugas yang diperlukan. Yaitu, robot mini individu (modul) dapat dengan mudah melakukan beberapa tugas sendiri, dan untuk tugas yang lebih rumit mereka berkumpul, seperti penjaga yang kuat digabungkan dalam Megazord (anak-anak tahun 90-an akan mengerti omong kosong seperti apa yang baru saja saya tulis :) )
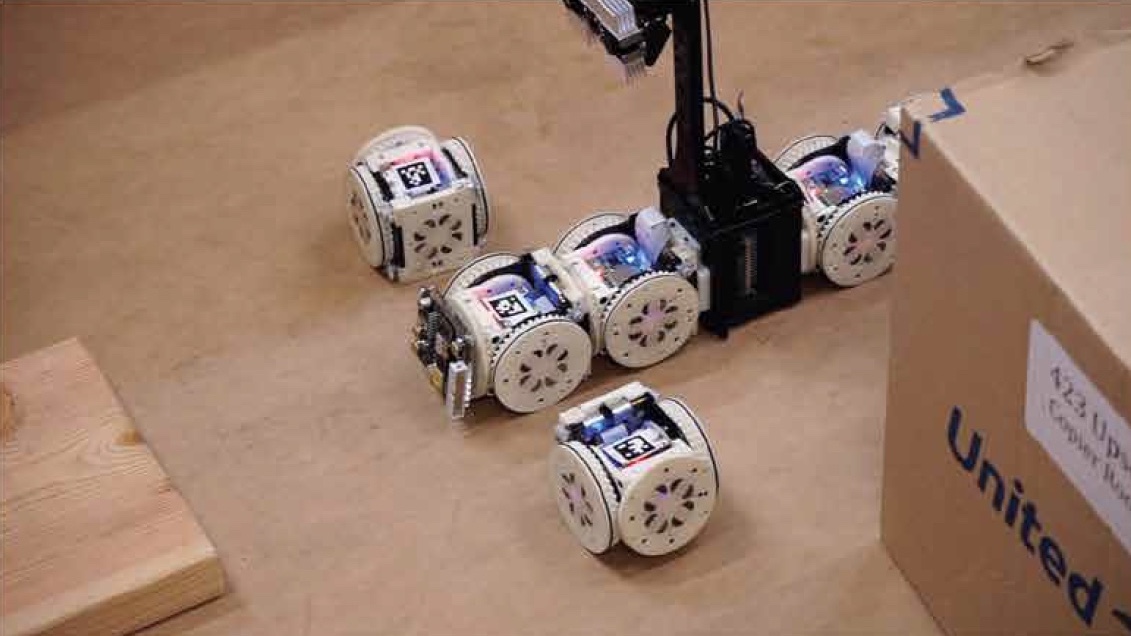
 Penampilan robot modular.
Penampilan robot modular.Peneliti mencatat bahwa studi sebelumnya telah dilakukan di bidang robot modular yang dapat memecahkan beberapa masalah. Namun, sebelumnya robot seperti itu bisa menyelesaikan tugas-tugas sederhana atau tugas-tugas kompleks, solusi yang telah diprogram ke dalamnya oleh manusia. Bahkan, mereka tidak membuat keputusan sendiri, menilai situasi dan kompleksitas yang diperlukan untuk menyelesaikan tugas.
Para ilmuwan melakukan serangkaian tes, yang masing-masing berbeda dari yang sebelumnya. Robot, di sisi lain, harus melakukan tugas tertentu (yang sedikit kemudian) dengan membangun kembali di bawah lingkungan baru. Mantel kulit domba ganda, tentu saja, tidak ada yang memintanya untuk melakukannya, tetapi hasilnya masih mengejutkan para ilmuwan. Dan sekarang kita akan berkenalan dengan mereka.
Uji "Megazord"Pengujian robot berlangsung dalam tiga tahap, yang masing-masing memiliki tugasnya sendiri. Pengujian dilakukan di sebuah ruangan di mana "lingkungan kerja" robot dibentuk dengan bantuan kotak, yang diubah oleh para peneliti di setiap tahap. Bayangkan sebuah labirin yang berubah setiap kali Anda memasukinya. Robot itu awalnya tidak diprogram untuk setiap lingkungan baru, baginya itu adalah lingkungan yang sama sekali baru. Satu-satunya hal yang diketahui robot adalah kemampuan mereka. Pertama-tama, ini adalah penilaian lingkungan, kemudian robot memilih dari perpustakaan kemampuannya yang paling efektif berkontribusi pada tugas.
Seperti yang saya katakan sebelumnya, hanya ada tiga fase uji dengan tugas dan lingkungan yang berbeda:
- Jelajahi lingkungan, temukan semua objek pink / hijau dan tanda biru, pindahkan objek ke titik reset;
- Jelajahi lingkungan, temukan kotak surat, letakkan papan tempat memotong roti di dalam kotak;
- Jelajahi lingkungan, temukan paketnya, tempelkan perangko di atasnya.
Tugasnya terlihat cukup sederhana, tapi ini untuk kita. Kami pergi ke kamar, melihat sekeliling, menemukan semua yang kami butuhkan dan siap. Tetapi jangan membandingkan salah satu komputer paling kompleks di dunia (otak kita) dan robot kecil.
Pada tahap pertama, robot ditugaskan untuk mengambil 2 objek - "sampah logam", ditandai dengan warna pink dan hijau, dan mengirimkannya ke titik pembuangan untuk "daur ulang". Titik reset ditandai dengan kotak biru di dinding.
Tugas diatur, lingkungan kerja siap, robot berjalan. Hal pertama yang dia lakukan adalah memindai ruang dan membuat peta tiga dimensi, yang menurutnya dia akan dipandu di masa depan.
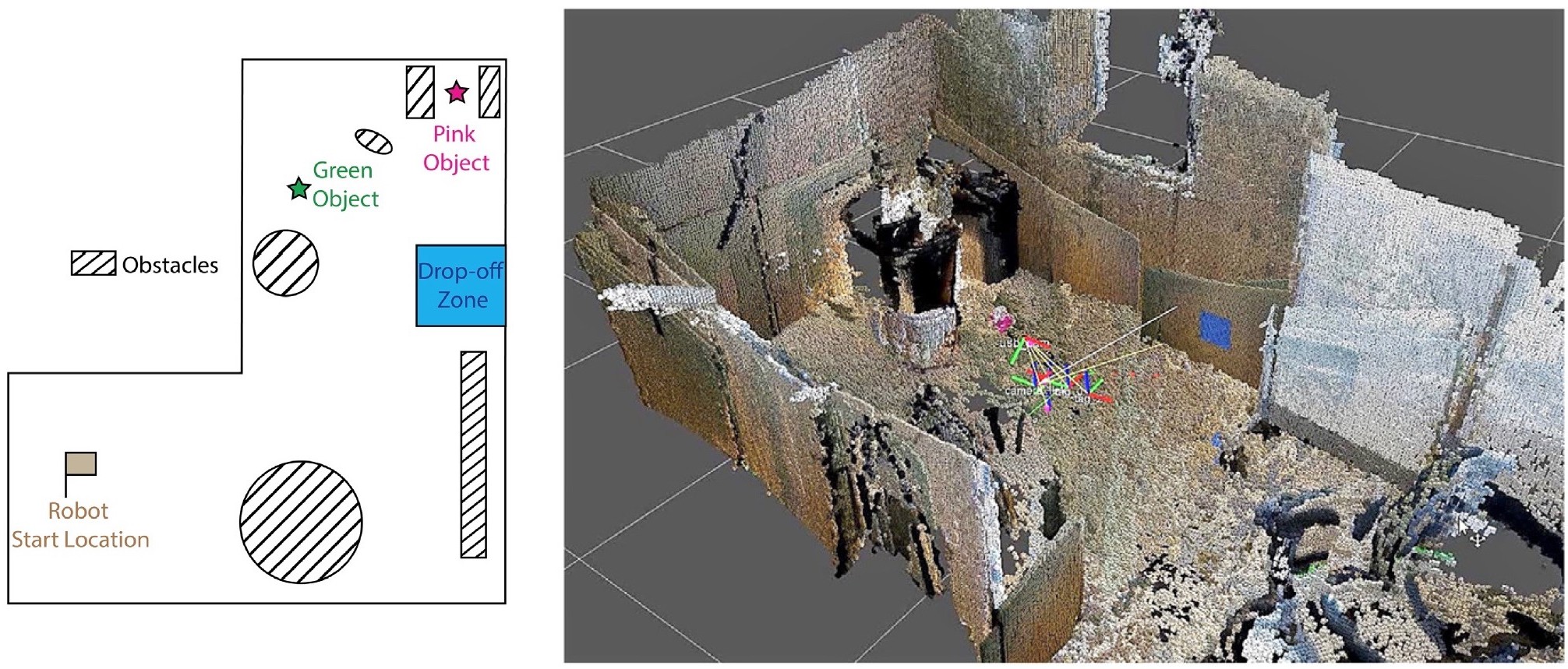 Skema zona uji tahap pertama (kiri) dan peta tiga dimensi dari lingkungan kerja robot modular (kanan).
Skema zona uji tahap pertama (kiri) dan peta tiga dimensi dari lingkungan kerja robot modular (kanan).Pertimbangkan aksi robot sebagai contoh pengujian tahap pertama, detailnya yang Anda lihat dalam diagram dan gambar di atas.
Tanda hijau pada diagram adalah lokasi kaleng soda biasa, akses yang tidak dilarang. Tanda merah muda adalah gulungan kawat yang terletak di ruang sempit antara dua tempat sampah. Juga, berbagai kendala ditemukan di seluruh area.
Pertama, robot memilih bentuk yang paling cocok untuk gerakan - "mobil". Setelah menemukan objek berwarna merah muda, robot itu menganalisis posisinya dan menyimpulkan bahwa bentuk seperti itu tidak akan memberinya kesempatan untuk mendapatkan objek. Karena itu, ia dibangun kembali dalam bentuk "bagasi" dan mengeluarkan sebuah benda. Kembali ke bentuk mesin, robot mengambil objek dan membawanya ke titik pembuangan, posisi yang sudah dia ketahui berkat pemindaian dan pembuatan peta.
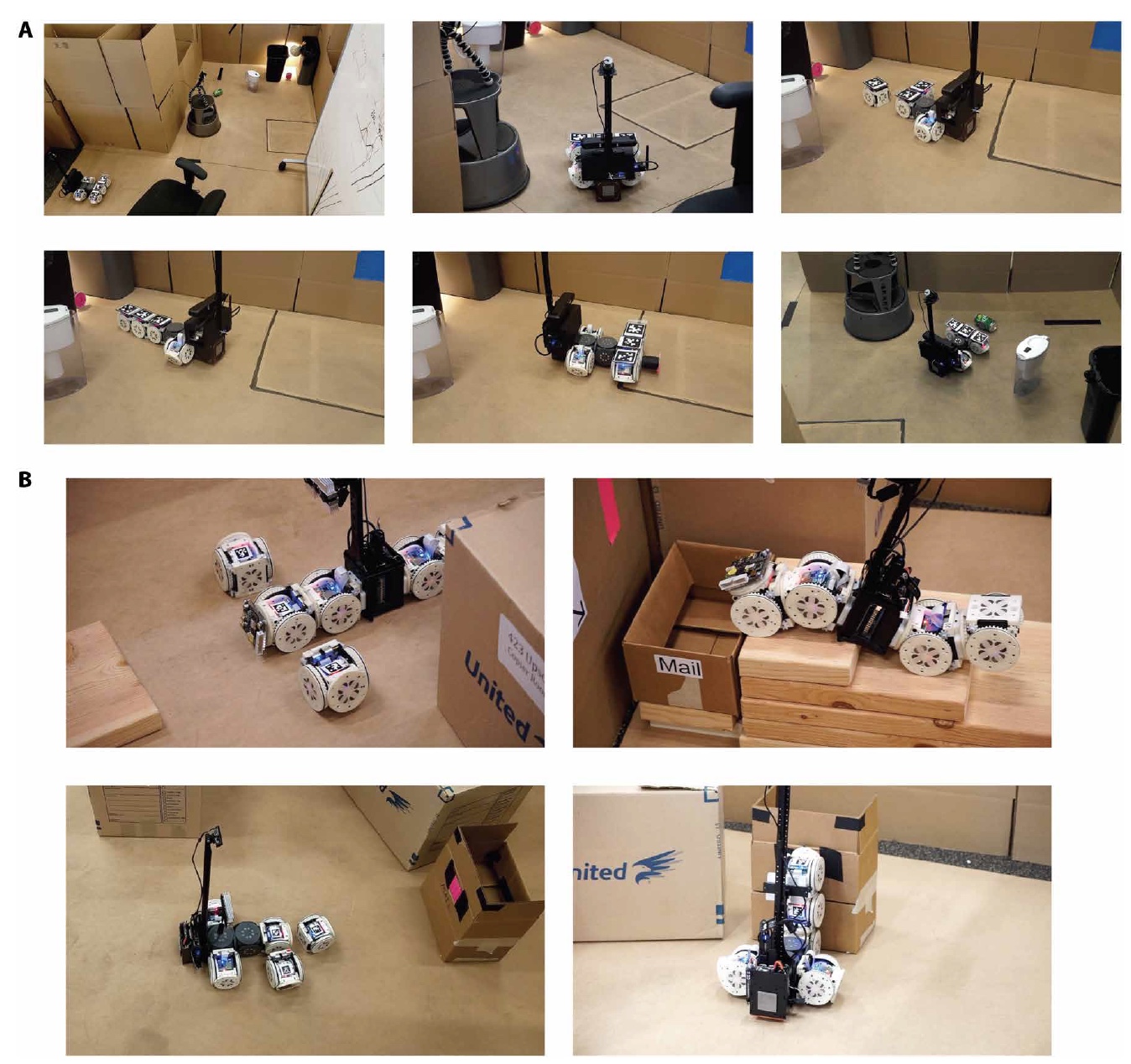 A - tahap pertama (dari kiri ke kanan: tampilan lingkungan kerja, pemindaian lingkungan, konfigurasi ulang robot, menangkap objek merah muda, memindahkan objek, menangkap objek hijau); B - tahap kedua (2 gambar atas) dan tahap ketiga (2 gambar bawah).
A - tahap pertama (dari kiri ke kanan: tampilan lingkungan kerja, pemindaian lingkungan, konfigurasi ulang robot, menangkap objek merah muda, memindahkan objek, menangkap objek hijau); B - tahap kedua (2 gambar atas) dan tahap ketiga (2 gambar bawah).Pada tahap kedua, lingkungan sudah berbeda, karena taktik robot sebelumnya tidak lagi efektif. Pada gambar di atas, kita melihat bahwa robot masuk ke bentuk "ular" untuk menaiki tangga dan meninggalkan objek di kotak surat. Artinya, robot, yang mengevaluasi situasi, menyadari bahwa kehadiran modul-modul tertentu tidak hanya akan berlebihan, tetapi juga dapat menyebabkan kegagalan, oleh karena itu memutusnya.
Pada tahap ketiga, robot memiliki masalah dalam menemukan target (tandai di mana ia harus meletakkan perangko), tetapi setelah beberapa menit ia dapat mendeteksi itu. Tanda ini terletak pada ketinggian 25 cm dari lantai, karena konfigurasi awal robot ("mesin") tidak efektif. Robot itu dibangun kembali dalam konfigurasi vertikal dan menempelkan cap.
Resep Robot PuzzleSeperti yang sudah kita pahami, Megazord kami terdiri dari beberapa modul robot kecil yang mampu melakukan berbagai gerakan sendiri, yang memberi robot besar keunggulan mobilitas dan, tentu saja, kemampuan untuk mengkonfigurasi ulang.
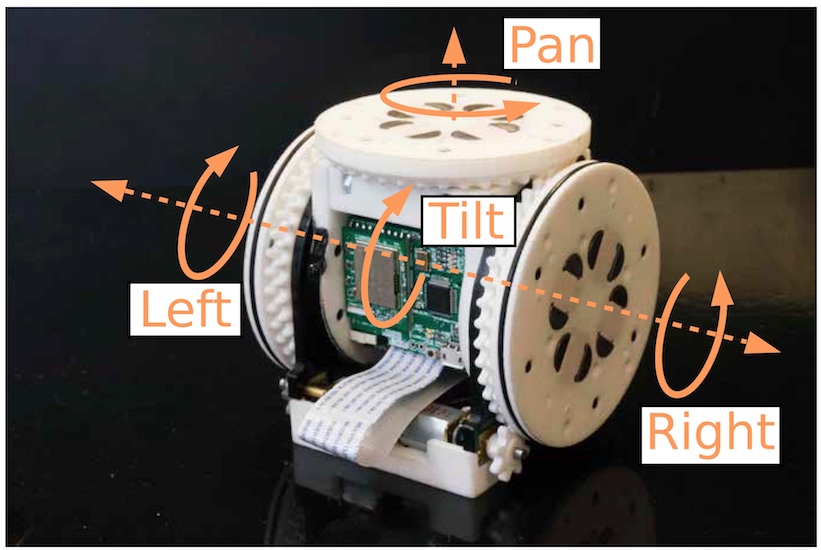 Penampilan modul. Tanda panah menunjukkan bagaimana modul dapat mengubah posisi (horizontal dan vertikal berputar dan miring).
Penampilan modul. Tanda panah menunjukkan bagaimana modul dapat mengubah posisi (horizontal dan vertikal berputar dan miring).Setiap modul (masing-masing permukaan kubus adalah 80 mm) dilengkapi dengan magnet elektro-permanen yang memungkinkan modul untuk saling terhubung tanpa memandang sisi koneksi. Juga, magnet ini memungkinkan Anda untuk melampirkan benda-benda feromagnetik (misalnya, untuk dibawa ke titik pembuangan atau membersihkan jalur untuk robot). Setiap modul individual juga dilengkapi dengan baterai sendiri (sekitar 1 jam), mikrokontroler, dan chip Wi-Fi. Semua modul dikontrol secara nirkabel oleh komputer pusat, dan router rumah tangga biasa digunakan untuk menyediakan lingkungan Wi-Fi.
 Penampilan bagian utama robot (kamera, dudukan, kamera dan basis RGB-D).
Penampilan bagian utama robot (kamera, dudukan, kamera dan basis RGB-D).Basis basis robot adalah sebuah kotak kecil (90x70x70 mm) yang terbuat dari pelat logam tipis, yang memungkinkan modul-modul untuk bergabung dengan basis melalui magnet. Proses komputasi dilakukan dengan menggunakan prosesor Intel Atom 1,92 GHz, 4 GB RAM dan 64 GB penyimpanan. Juga, adaptor Wi-Fi USB dipasang di pangkalan.
Langkah terpenting dalam implementasi tugas adalah pemahamannya. Aturan ini berlaku untuk manusia dan robot kecil dan pintar. Untuk memahami apa dan bagaimana melakukannya, robot memindai lingkungan. Ini dilakukan melalui kamera RGB-D.
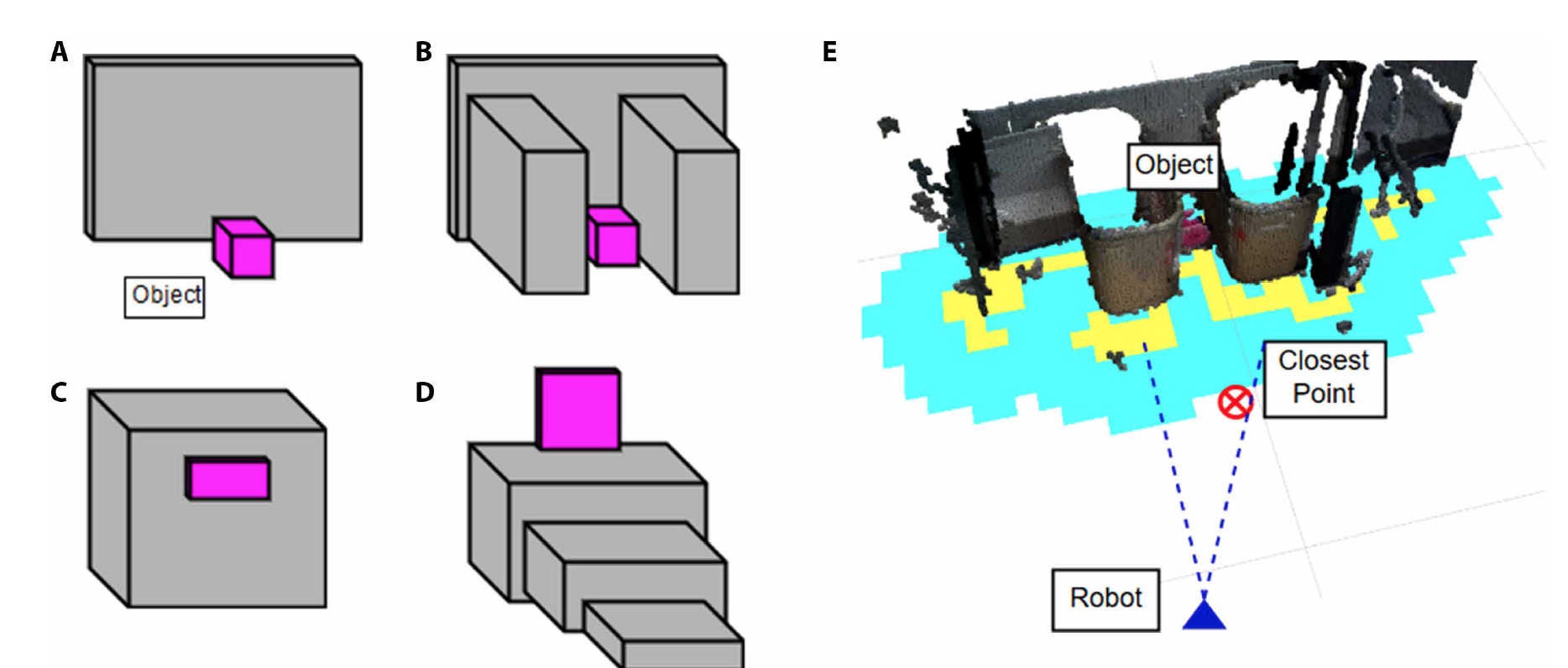 Posisi objek yang menarik ( A , B adalah tahap pertama, C adalah yang kedua dan D adalah yang ketiga), serta contoh bagaimana robot "melihat" selama pengujian dengan objek di dalam celah sempit ( E ).
Posisi objek yang menarik ( A , B adalah tahap pertama, C adalah yang kedua dan D adalah yang ketiga), serta contoh bagaimana robot "melihat" selama pengujian dengan objek di dalam celah sempit ( E ).Ketika sistem pemindaian mengenali objek yang diperlukan, fungsi karakterisasi informasi yang diperoleh dari peta tiga dimensi lingkungan diaktifkan. Dengan cara ini, grid ruang terbentuk, di mana area yang tidak dapat diakses robot ditandai dengan warna kuning. Selanjutnya, sistem menemukan titik akses terdekat ke objek (pada sudut 20 ° dari robot itu sendiri). Jika jarak dari titik ini ke objek lebih besar dari nilai batas, dan objek terletak di lantai, sistem menentukan bahwa objek tersebut terletak di pembukaan. Jika objek didefinisikan oleh sistem dalam posisi di atas lantai, maka ia mengevaluasi ini sebagai langkah-langkah. Jika nilai jarak dari titik ke objek lebih rendah dari indikator batas, sistem memutuskan untuk menggunakan konfigurasi "bebas" (yaitu, asli) atau "tinggi" (untuk mengangkat ke ketinggian tertentu).
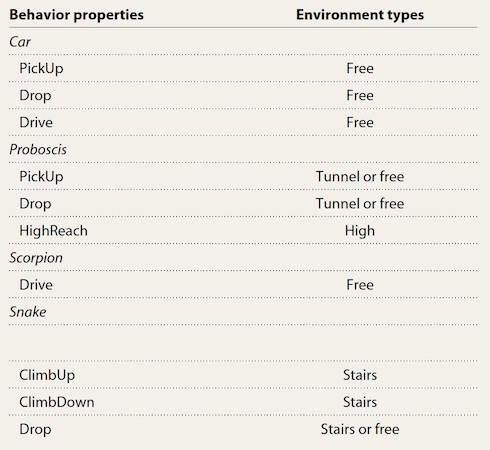 Tabel konfigurasi robot dan untuk apa mereka digunakan.
Tabel konfigurasi robot dan untuk apa mereka digunakan.Spesifikasi tugas robot ini cukup sederhana. Pertimbangkan contoh dengan kotak surat:
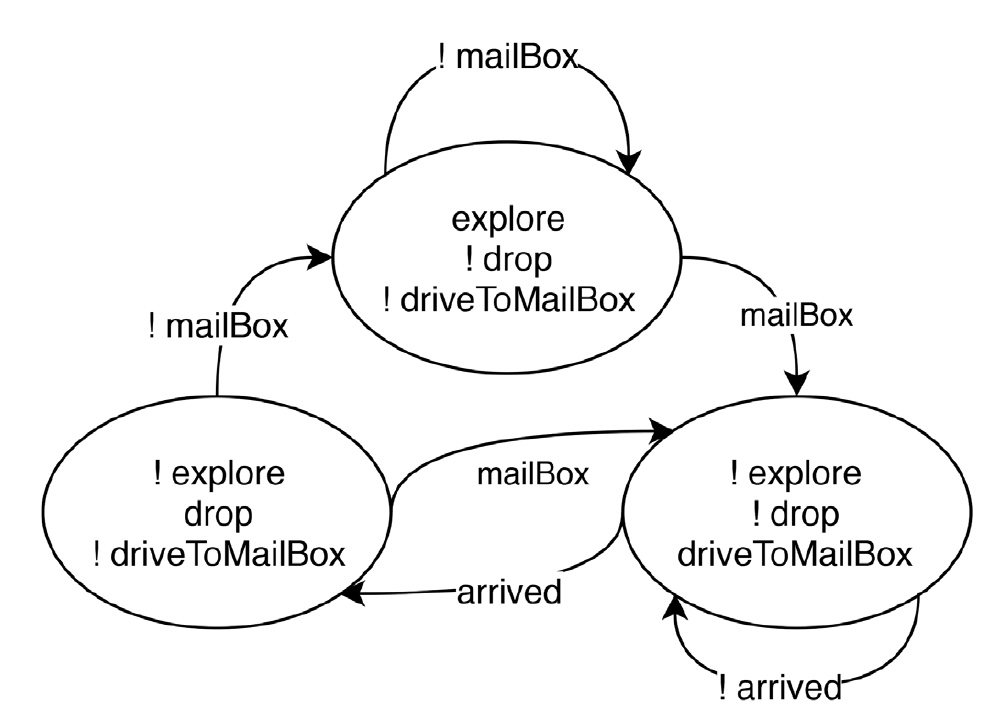
- melakukan "penelitian" jika dan hanya jika robot tidak melihat kotak surat;
- melakukan "gerakan ke kotak" jika dan hanya jika robot melihat kotak dan belum mencapainya;
- melakukan "reset" (suatu objek dalam kotak) jika dan hanya jika robot melihat kotak dan tiba di sana.
Secara skematis, ini dapat direpresentasikan sebagai berikut (tindakan yang ditandai dengan nilai "benar" dan "salah" ditandai dengan "!", Bergantung pada variannya):
Proses mengubah konfigurasi dimulai dengan fakta bahwa sistem menentukan kebutuhan untuk proses ini. Jika ada, kamera menghadap ke bawah mendeteksi bagian 0,75 m kali 0,5 m, di mana proses konfigurasi ulang dapat berhasil dan tanpa gangguan dari beberapa objek. Kontroler menentukan konfigurasi awal dan akhir, setelah itu mentransmisikan sinyal ke modul yang memiliki label AprilTag (terlihat seperti kode QR). Modul menerima perintah untuk memutuskan sambungan, pindah ke posisi yang diinginkan dan terhubung dalam konfigurasi baru.
Video ini menunjukkan seluruh proses pengujian robot, dari memindai media hingga menyelesaikan tugas.Elemen yang paling aneh dari robot-transformer ini masih bukan kemampuan untuk mengubah konfigurasi modul, tetapi kemampuan untuk secara mandiri memutuskan bagaimana mengubahnya, beradaptasi dengan keadaan.
Arsitektur sistem menggunakan kerangka kerja yang memungkinkan setiap pengguna, menggunakan kosa kata yang paling umum, untuk mengatur tugas untuk robot dan membentuk pengontrol pusat, yang pada gilirannya akan mengontrol modul tergantung pada lingkungan pelaksanaan tugas. Landasan dari semua ini adalah LTLMoP (Linear Temporal Logic MissiOn Planning), yang memungkinkan Anda untuk membuat pengontrol berdasarkan instruksi tingkat tinggi yang disediakan pengguna.
Untuk seorang kenalan yang lebih terperinci dengan penelitian ini, saya merekomendasikan
laporan para peneliti dan
bahan tambahan untuk itu.
EpilogSistem ini sangat menarik, meski bukan tanpa kekurangan. Jadi, misalnya, pengguna menginstruksikan robot untuk menempatkan objek di kotak surat, tetapi tidak menjatuhkan objek sampai kotak surat terdeteksi. Dengan kata lain, robot tidak bisa hanya menerimanya dengan kata-kata "F * ck itu, saya berhenti!" mengganggu tugas. Pada saat yang sama, jika robot tidak berhasil mendeteksi kotak, sistem akan meminta pengguna untuk memasukkan data klarifikasi. Ternyata robotnya tidak begitu mandiri? Tidak, tentu saja ini bukan T-1000, tetapi langkah pertama untuk ini sudah ada. Bagaimanapun, robot itu sendiri memutuskan konfigurasi mana yang cocok untuk tugas dengan cara terbaik. Tidak mungkin untuk menyebut ini proses pemikiran, semuanya cukup sederhana dan linier di sini.
Namun, bahkan jika transformator kecil ini membutuhkan bantuan seseorang, ia masih dapat membuat keputusan. Semoga saja kita saat ini tidak mengamati pembentukan Ultron di masa depan. :)
Jumat offtopic (semua memiliki akhir pekan yang menyenangkan):
Video untuk mereka yang tidak dapat memutuskan siapa yang paling disukainya: cool samurai atau robot keren.
Dan offtopic kedua (maaf, tidak bisa menahan) untuk pecinta musik.
Terima kasih telah tinggal bersama kami. Apakah Anda suka artikel kami? Ingin melihat materi yang lebih menarik? Dukung kami dengan melakukan pemesanan atau merekomendasikannya kepada teman-teman Anda,
diskon 30% untuk pengguna Habr pada analog unik dari server entry-level yang kami temukan untuk Anda: Seluruh kebenaran tentang VPS (KVM) E5-2650 v4 (6 Cores) 10GB DDR4 240GB SSD 1Gbps dari $ 20 atau bagaimana membagi server? (opsi tersedia dengan RAID1 dan RAID10, hingga 24 core dan hingga 40GB DDR4).
VPS (KVM) E5-2650 v4 (6 Cores) 10GB DDR4 240GB SSD 1Gbps hingga Desember secara gratis ketika membayar untuk jangka waktu enam bulan, Anda dapat memesan di
sini .
Dell R730xd 2 kali lebih murah? Hanya kami yang memiliki
2 x Intel Dodeca-Core Xeon E5-2650v4 128GB DDR4 6x480GB SSD 1Gbps 100 TV dari $ 249 di Belanda dan Amerika Serikat! Baca tentang
Cara Membangun Infrastruktur Bldg. kelas menggunakan server Dell R730xd E5-2650 v4 seharga 9.000 euro untuk satu sen?