Salam lagi!
Karena esai singkat saya sebelumnya secara umum dipersepsikan positif, saya ingin berbagi pengetahuan tentang sepeda listrik yang terakumulasi selama forum membaca.

Pada artikel ini saya ingin berbagi jenis drive apa yang digunakan pada sepeda listrik, pro, kontra, dan fiturnya.
Saya harap ini tampaknya menarik bagi seseorang. Saya hanya akan meninjau motor DC tiga fase - karena saya belum memeriksa sisanya, dan ini yang relatif jarang
saat ini.
Jadi, mari kita mulai:
Secara umum, elemen penggerak sepeda listrik dapat dipilah menjadi 3 jenis:
- Gerbong motor listrik, motor listrik yang berlokasi di tempat.
- Roda motor roda gigi (motor hub diarahkan).
- Roda motor dengan penggerak langsung (direct drive).
Mari kita mulai dengan yang
pertama: mid-drive, central .
Omong-omong, ini cukup populer di semua jenis sepeda listrik Eropa bermerek.
Itu terletak di dekat kereta (pedal) sepeda, melalui penggerak rantai, dan mekanisme roda gigi,
jika ada satu di atas sepeda, ia memutar roda belakang.


Kelebihan: jika sepeda dengan roda gigi - berbagai penggunaan optimal karena roda gigi ini - Anda bisa mendapatkan traksi yang baik pada kecepatan rendah, dan kecepatan tinggi.
Cons: rantai dan bintang menjadi barang habis pakai, jika Anda memutus rantai di sepanjang jalan, atau menekuk ayam jantan, atau entah bagaimana memutus rantai drive, Anda akan kembali ke rumah dengan berjalan kaki mendorong transportasi Anda.
Juga tidak mungkin penggerak semua roda menggunakan motor tunggal.
Nomor Dua: Gearbox, diarahkanMotor listrik terletak di dalam hub roda, ada juga gigi reduksi planetary gear, yang memungkinkan motor listrik berputar dengan kecepatan lebih tinggi daripada pelek roda.
Roda gigi biasanya terbuat dari plastik.
Ada mekanisme mentransmisikan momen dalam sistem motor roda hanya dalam satu arah - dengan traksi dari mesin (freewheel, freewheel).
Dalam kasus ketika transmisi berjalan ke arah yang berlawanan, sistem terputus, sehingga selama roll-up atau gerakan dari pedal, motor listrik tidak berputar, dan dengan demikian tidak mempersulit rotasi roda.
Di sini di sebelah kiri - drive langsung, di sebelah kanan - gearbox:

gear motor:


Kelebihan: Efisiensi yang lebih baik dalam berbagai kecepatan relatif terhadap penggerak langsung, traksi yang lebih baik pada kecepatan dan start yang rendah, konsumsi energi yang lebih kecil per kilometer, ukuran dan berat yang lebih kecil, kurangnya resistensi terhadap gerakan saat berkendara dari pedal.
Cons: kurangnya kemampuan untuk menggunakan pemulihan, titik lemah dalam bentuk roda gigi plastik, ketika memotong gigi, atau kerusakan pada kopling yang berjalan di jalan, Anda harus mengayuh pedal.
Nomor Tiga: Drive LangsungSistem yang paling dapat diandalkan, dengan meminimalkan bagian yang tidak perlu, adalah motor listrik yang bersih, rotor duduk di sumbu dan relatif tidak bergerak terhadap garpu, stator berputar dengan roda.




Pro: minimum bagian yang tidak perlu, pemulihan mungkin, pencapaian mudah kecepatan tinggi.
Cons: diameter dan berat yang relatif besar, efisiensi rendah pada kecepatan rendah.
Sekarang tentang masalah umum terkait, terutama dengan roda motor, karena middrive tidak menarik bagi saya, jadi saya tidak terlalu tertarik dengannya.
Jadi, secara umum, roda gir motor lebih torsi tinggi dan lebih ekonomis.
Drive langsung lebih cepat, jadi jika Anda ingin berkendara dengan kecepatan 40 - 50+, Anda sebaiknya melihat drive langsung.
Penggerak langsung juga dapat menggunakan pengontrol untuk menerapkan mode pemulihan - mentransfer motor listrik ke mode generator dengan menyimpan energi yang dihasilkan kembali ke baterai.
Efek mengisi ulang baterai dengan pemulihan agak kecil - urutan peningkatan besarnya 2-3 persen jarak tempuh, ditambah ada juga nuansa dalam bentuk arus pengisian tinggi, dan fakta bahwa pengisian baterai lithium pada suhu di bawah +5 Celcius adalah untuk membunuhnya (berlaku untuk ponsel) dan perangkat rumah tangga lainnya pada lithium-ion dan lithium-polimer, by the way), tetapi dapat digunakan sebagai rem, dan dengan demikian menghemat bantalan rem.
Ngomong-ngomong, dalam "transportasi listrik besar", dalam bentuk, misalnya, kereta listrik ER2T, pengereman regeneratif persis digunakan - hingga kecepatan sekitar 25 km / jam, kereta melambat dengan hanya memasukkan motor listrik traksi ke mode generator, mentransfer listrik yang dihasilkan kembali ke jaringan kontak.
Untuk pengendaraan yang ekonomis, jauh lebih berguna untuk menggunakan pengereman minimum, dan maksimum - di pantai - yaitu, melihat lampu lalu lintas merah, misalnya, jangan langsung menuju ke sana di atas gas, dan tutup gas untuk 300 meter, dan pantai untuk bergerak setibanya di lampu lalu lintas tidak lebih dari 10-15 km / jam.
Apa lagi: kecepatan berkendara.
Salah satu pertanyaan paling umum untuk pemula adalah seberapa cepat sepeda saya akan mengendarai drive listrik?
Itu tergantung pada empat hal:
1. Kecepatan idle dari roda motor pada tegangan pengenal:
Normal dijual mereka menunjukkan, atau mereka dapat dihancurkan.
Roda motor saya, misalnya, memiliki 310 RPM pada 48V. Bila diukur dengan tachometer China,
Ternyata 305 putaran per menit ketika ditenagai oleh 4 baterai timbal yang terhubung seri 12 volt (sekitar 50 volt sebenarnya) pada roda yang ditangguhkan - dapat diterima.
Jangan lupa bahwa ini adalah kecepatan roda motor tanpa beban, itu penting!
2. Diameter pelek roda. Jelas bahwa semakin besar keliling roda, semakin besar kecepatan aktual pada kecepatan yang sama.
Formula untuk perhitungan: keliling roda dalam milimeter / 1000 * (putaran roda motor / 60) = kecepatan dalam meter per detik. Untuk kilometer per jam, kalikan dengan 3,6, untuk mendapatkan kecepatan prediksi akhir - semua ini masih dibagi dengan 1,2, karena kecepatan di bawah beban yang bahkan cukup layak akan lebih rendah daripada tanpa beban (sekitar 20 persen, ya).
3. Korespondensi kekuatan untuk perlawanan terhadap gerakan.
Jika Anda memiliki kecepatan desain 50 mph, untuk mencapai dan mempertahankan kecepatan seperti itu, motor harus mengembangkan daya pada urutan kilowatt, atau 1000 watt.
Jika motor Anda akan mengembangkan daya 500 watt, maka karena resistensi rotasi tidak akan dapat mencapai kecepatan maksimum, itu jelas, dan Anda akan puas dengan kecepatan maksimum 37 mph bukannya 50 - sementara motor masih akan cukup panas karena kelebihan beban, jika pada kecepatan ini, Anda akan mengarahkan tongkat gas ke ujung.
4. Tegangan suplai.
Saat membeli roda motor, tegangan suplai nominal ditunjukkan padanya - misalnya, 48 volt.
Tapi tidak ada yang secara langsung memberi makan mesin seperti itu - mereka dikendalikan oleh pengontrol yang menerima tegangan konstan satu fase dari baterai, dan mengubahnya menjadi tiga fase "berputar" untuk menyalakan roda motor.
Jadi, tidak perlu menyalakan roda motor dengan pengontrol dan baterai untuk voltase yang ditentukan.
Anda dapat menyalakan motor 48 volt dengan baterai dan pengontrol 36 volt.
Baik 24, atau 60 volt - sementara kecepatan putaran roda motor pada kecepatan penuh akan masing-masing 0,75, 0,5, atau 1,25 dari nominal.
Artinya, Anda dapat dengan baik mengontrol kecepatan maksimum dalam batas-batas tertentu dengan murni mengubah tegangan baterai dan pengontrol.
Ada pengontrol tegangan ganda - misalnya, 36/48 volt, atau 48/60 volt.
Juga, parameter penting dari pengontrol dalam kaitannya dengan motor listrik adalah arus listriknya, di mana daya maksimum yang dicapai oleh motor yang diumpankannya dapat diatur - misalnya, 36v 17A = ~ 612 watt, 60V 25A = ~ 1500w
Faktanya adalah bahwa "daya dalam watt" yang ditunjukkan pada roda motor agak direkomendasikan dalam jangka panjang, di mana ia tidak terlalu panas, dan di mana umur panjang dan bahagia dijamin.
Maka dengan motor 250 watt, Anda bisa mengaplikasikan 500 dan 800 watt, atau bahkan kilowatt - tentu saja, dalam jangka panjang, roda gigi plastik atau freewheels mungkin tidak menyukainya, tetapi diyakini bahwa sebagian besar penggerak tiga-roda penggerak dua-tiga kali lipat meningkatkan relatif baik.
Namun, pengontrol berhak mendapatkan artikel terpisah, jadi kami tidak akan pergi ke hutan ini sekarang.
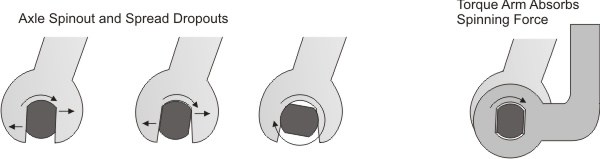
Yang lebih penting - amplifier putus (torque arm).
Karena kenyataan bahwa kerangka sepeda konvensional tidak dirancang untuk menahan torsi poros roda, terutama dalam hal garpu / rangka aluminium, sangat disarankan untuk mengambil tindakan terhadap memutar poros roda-motor.
Faktanya adalah bahwa menurut sesuatu di sana, tindakan apa pun menimbulkan oposisi.
Roda motor memutar pelek, bersandar pada porosnya, yaitu porosnya seperti titik tumpu, yang ia coba putar ke arah lain.
Jika lekukan garpu tidak dapat bertahan saat ini, mereka patah, akibatnya - roda pergi secara terpisah, sepeda dengan kecepatan dengan bulu-bulu garpu menempel ke aspal. Apa yang menyebabkan hal ini - saya harap tidak perlu menjelaskan, patah tulang dan bahkan kamar mayat sebagai hasilnya - sangat mungkin.


Semoga beruntung dengan elektrifikasi, teman-teman!
PS sesuatu mata saya di sini tidak baik - untuk pertama kalinya dia sendiri, dalam gambar besar, memperhatikan ...
tetapi secara umum saya putih dan lembut, jika Anda tidak harus pergi bekerja pagi-pagi ...: D
