Artikel ini ditulis untuk merangkum pengalaman saya dalam pembuatan independen pembangkit listrik untuk paramotor listrik, dan pada kenyataannya: motor listrik, pengontrol, baterai, dan lampiran lainnya.

Latar belakang
Seperti kebanyakan, saya tertarik pada subjek penerbangan sejak kecil, tetapi kebetulan saya mengambil penerbangan nyata di udara, dan bukan pada model simulator atau radio-kontrol, belum lama ini, pada tahun 2014. Saya memilih paraglider sebagai jenis pesawat yang paling demokratis.
Pada tahap awal penerbangan non-bermotor, ketika setiap menit yang dihabiskan di udara mahal, Anda sering berpikir tentang keuntungan dari penerbangan motor, tetapi Anda segera melihat kerugiannya - peningkatan kebisingan dan getaran dari mesin dua langkah primitif, bau bahan bakar selama transportasi dan penyimpanan instalasi. Dan karena saya memiliki pengalaman yang sukses untuk menyetrum sendiri sepeda, diputuskan untuk melakukan instalasi listrik.
Setelah merenungkan berbagai desain, saya memutuskan skema penggerak baling-baling penggerak langsung yang diimplementasikan oleh banyak orang, dengan motor listrik berdiameter besar, tetapi dengan ketebalan yang kecil.

Motor listrik, datar seperti pancake, memberikan torsi yang dapat diterima dengan bobot kecil, dimensi, dan kompleksitas desain. Efisiensi yang lebih besar dapat dicapai dengan menggunakan motor listrik kecepatan tinggi berukuran kecil dengan gearbox (saya yakin ini pada sepeda listrik saya), tetapi kompleksitas pembuatan gearbox seperti itu, dan yang paling penting kebisingan yang cukup besar membuat saya meninggalkan ide ini.
Tanpa basa-basi lagi, mengambil gambar dan sketsa motor listrik HPD10 yang terkenal dari jaringan sebagai dasar, dalam beberapa hari saya menggambar motor saya di Solid
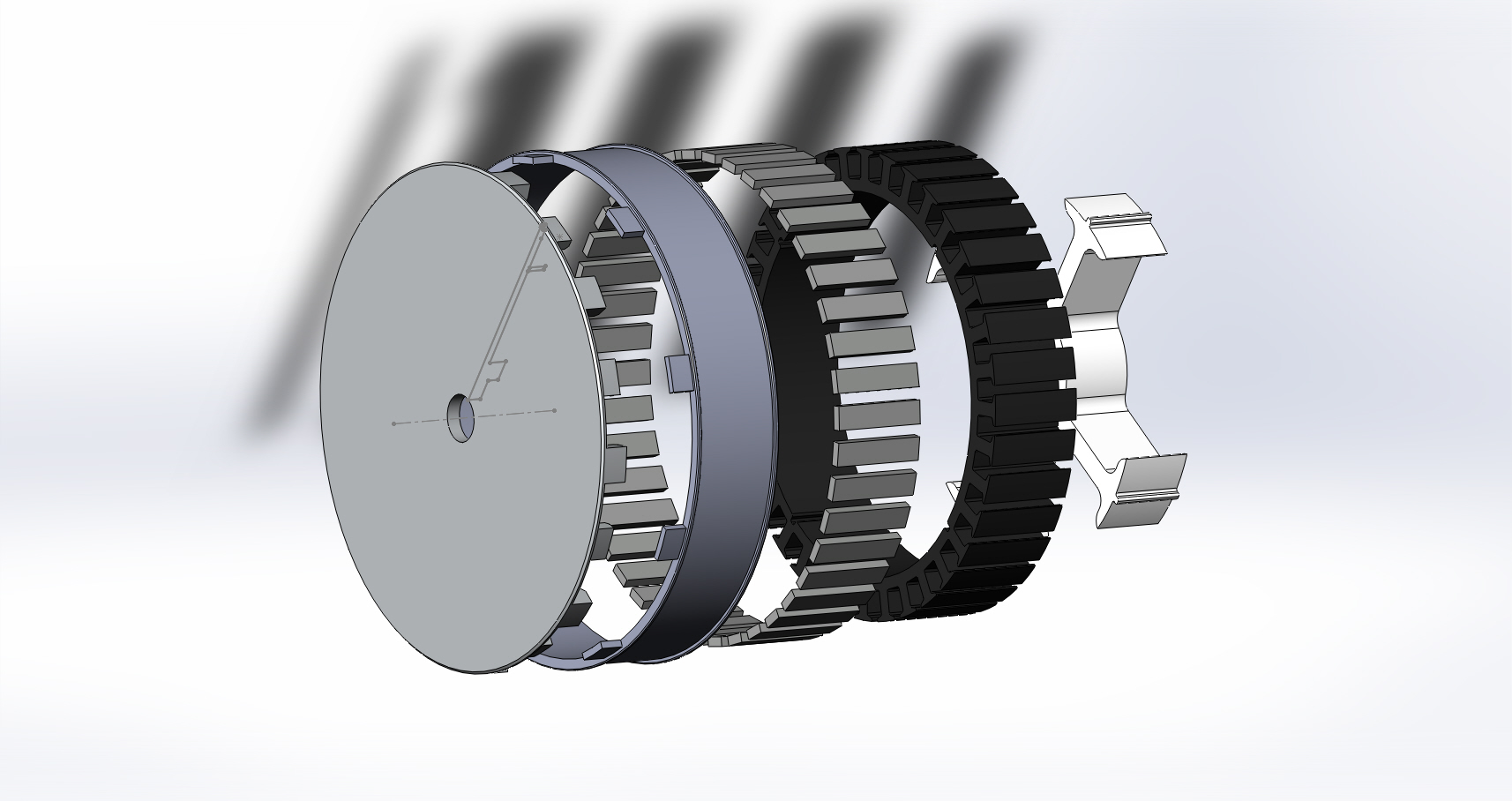
Dari leluhur, hanya profil pelat stator tetap tidak berubah, yang menurut saya, perancang Jerman mengambil tanpa perubahan dari roda sepeda motor yang tidak diketahui.

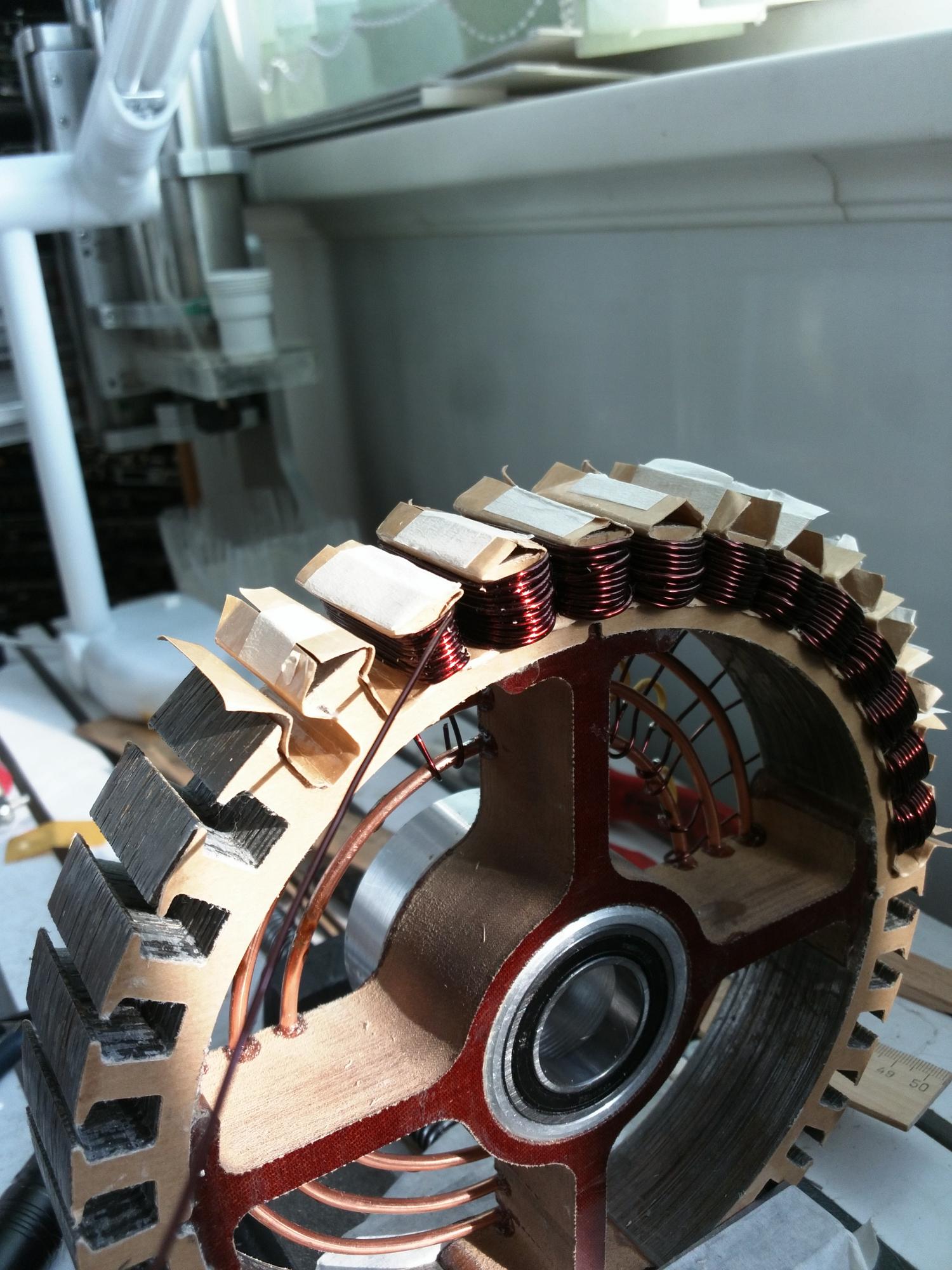
Bagian yang paling penting, sirkuit magnetik stator harus dibuat dari satu set pelat baja magnetik isotropik khusus dengan ketebalan tidak lebih dari 0,35 mm. Setelah pencarian yang panjang, di St. Petersburg ada perusahaan yang siap memenuhi pesanan kecil saya.

Cincin rotor terbuat dari pipa yang cocok yang ditemukan pada besi tua

Disk digiling dari piring d16t, hub terbuat dari PCB tebal.


Belitan terakhir, pekerjaan paling membosankan.
Sampel antara siap, daya 12kW, tegangan maksimum 100V.
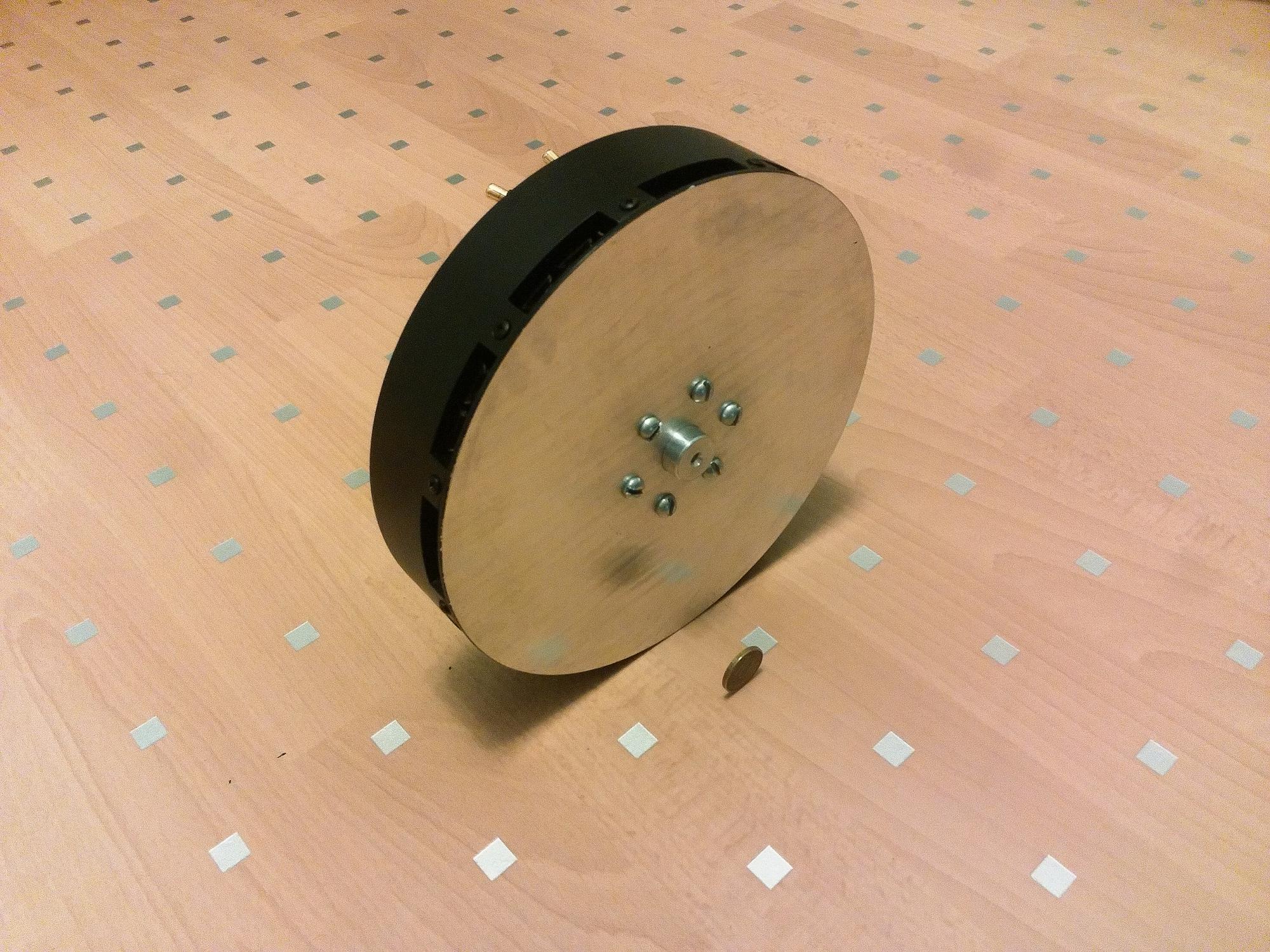
Pada tahap menghitung lilitan motor, saya meningkatkan tegangan maksimum, dibandingkan dengan prototipe dua kali, hingga 100V. Pada saat itu saya tidak berpikir tentang jebakan solusi ini, plus utama yang saya lihat dalam penurunan dua kali lipat dalam arus, karenanya koneksi serial baterai yang relatif rendah saat ini, menghubungkan kabel dan konektor dari bagian yang lebih kecil.
Kenyataannya ternyata kurang cerah, pengendali yang tersedia saat itu adalah dengan tegangan atau arus maksimum yang lebih rendah, sering tidak tahu bagaimana bekerja dalam mode tanpa sensor, atau mahal.
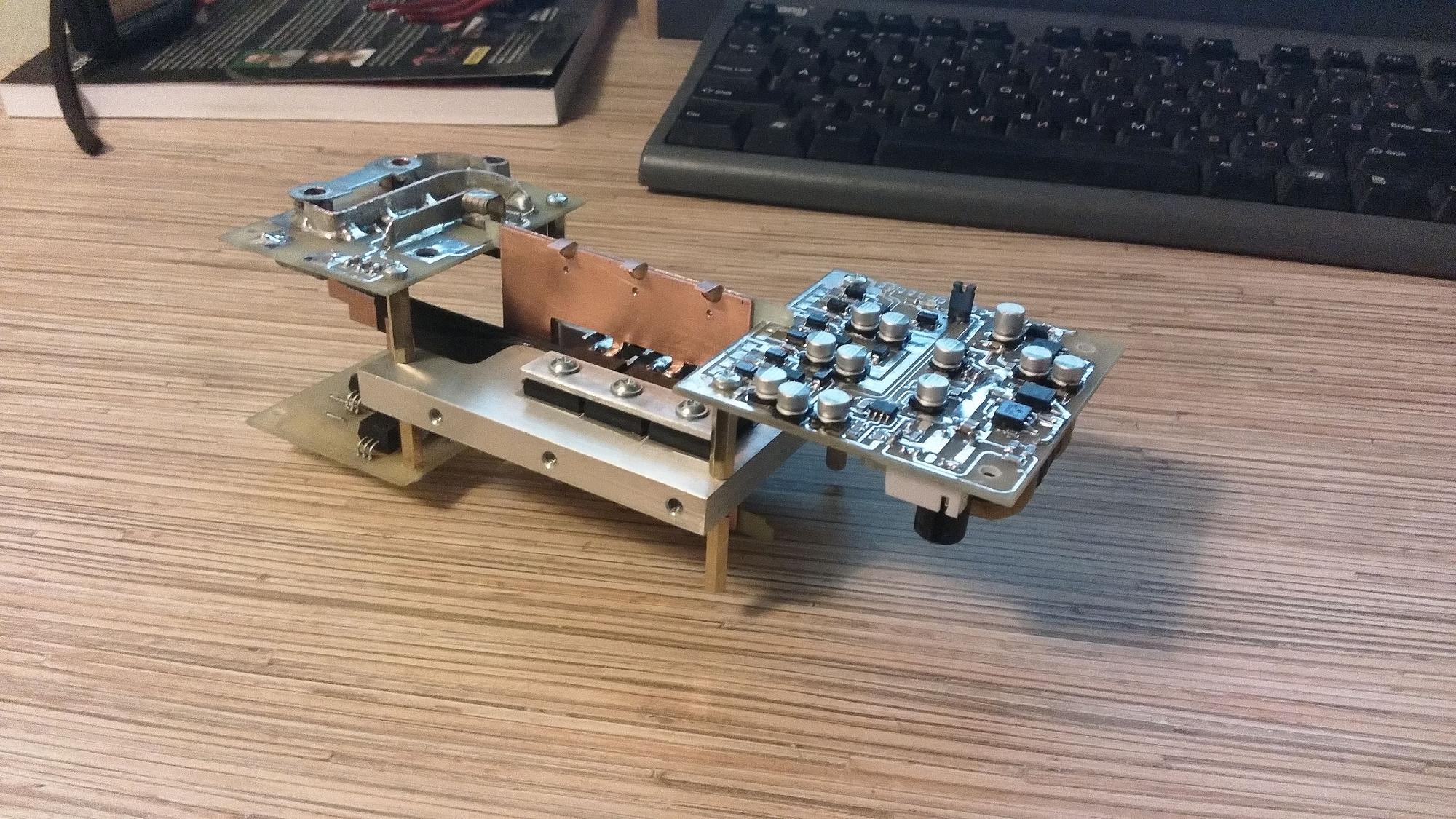
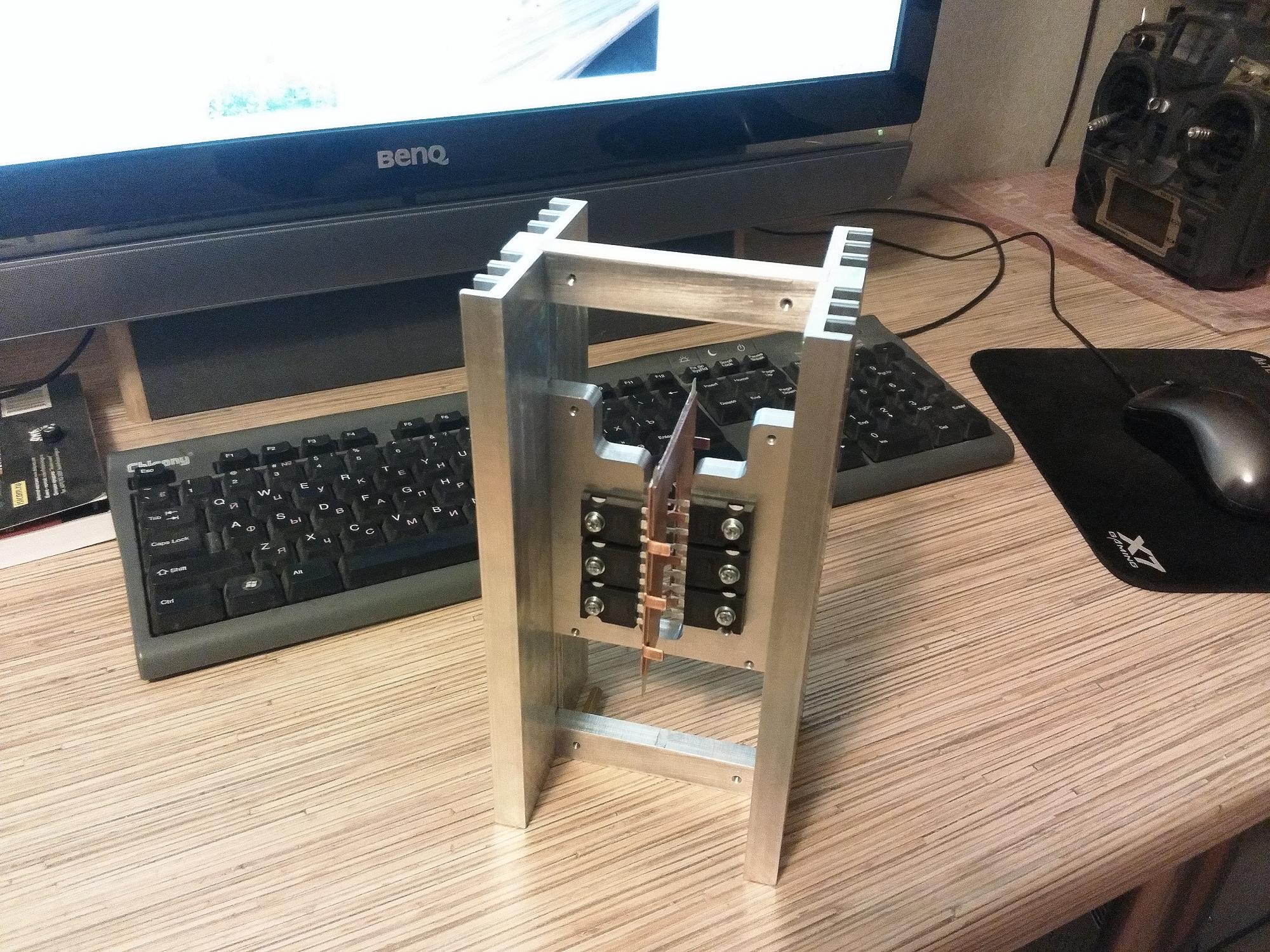
Nah, setelah berpikir, saya memutuskan untuk membuat controller sendiri. Sebelum ini, dari yang serupa, saya hanya membuat pengontrol BLDC sederhana pada AVR, dengan firmware berkedip keluar dari bagian-bagian apnotes. Oleh karena itu, dengan sadar menilai kekuatan dan waktu saya, saya menyelesaikan proyek semi-terbuka dari
pengontrol vektor
Lebowski , penulis dengan endless-sphere.com
Penulis mengirimkan dsPIC30 yang di-flash, sisanya harus Anda lakukan sendiri. Dengan meningkatkan sirkuit tahap keluaran yang disarankan, saya mendapatkan apa yang saya butuhkan, menghabiskan sedikit uang, dan hanya membakar satu set transistor daya untuk debugging. Arus fasa maksimum pengontrol adalah 200 A, tegangan hingga 150 V.

Sisi kebalikan dari proyek tanpa sumber, ketidakmungkinan meningkatkan firmware untuk Anda sendiri, kebutuhan untuk membeli pengontrol firmware baru jika Anda membakar yang sudah ada. Rake dengan tegangan 100 V mengenai hal ini, membatasi pilihan transistor daya.
Setelah motor dan pengontrol, membuat baterai tampak seperti mudah berjalan, tetapi ada masalah di sana juga. Setelah membeli 24 sel LI-PO IMP3201057P22A, saya mengumpulkan dari mereka tiga baterai 8S, dengan arus panjang 200 A dan jangka pendek 400 A.



Semuanya baik-baik saja, baterainya kuat, mereka hampir tidak memanas pada 120 ampere, tetapi beratnya ... Baterai yang dipasang pada braket ternyata memiliki berat hampir 15 kg, itu menyedihkan. Hasilnya, seluruh rakitan instalasi ternyata memiliki berat 32 kg, lebih berat dari banyak bensin. Ini sama sekali tidak cocok untukku. Diputuskan - baterai dijual, kami membuat baterai baru.
Itu perlu untuk membuat baterai dengan berat setengah kecil dan waktu penerbangan 15 menit. Saya berhenti di sel 18650 inr18650-25r, yang saya pesan dari Belanda dan diterima dengan aman. Dia membuat kasing seringan mungkin tapi kuat, dia menghubungkan sel-sel dengan menyolder, mengingat pengelasan dengan alat kerajinan akan lebih berbahaya daripada penyolderan yang bijaksana.
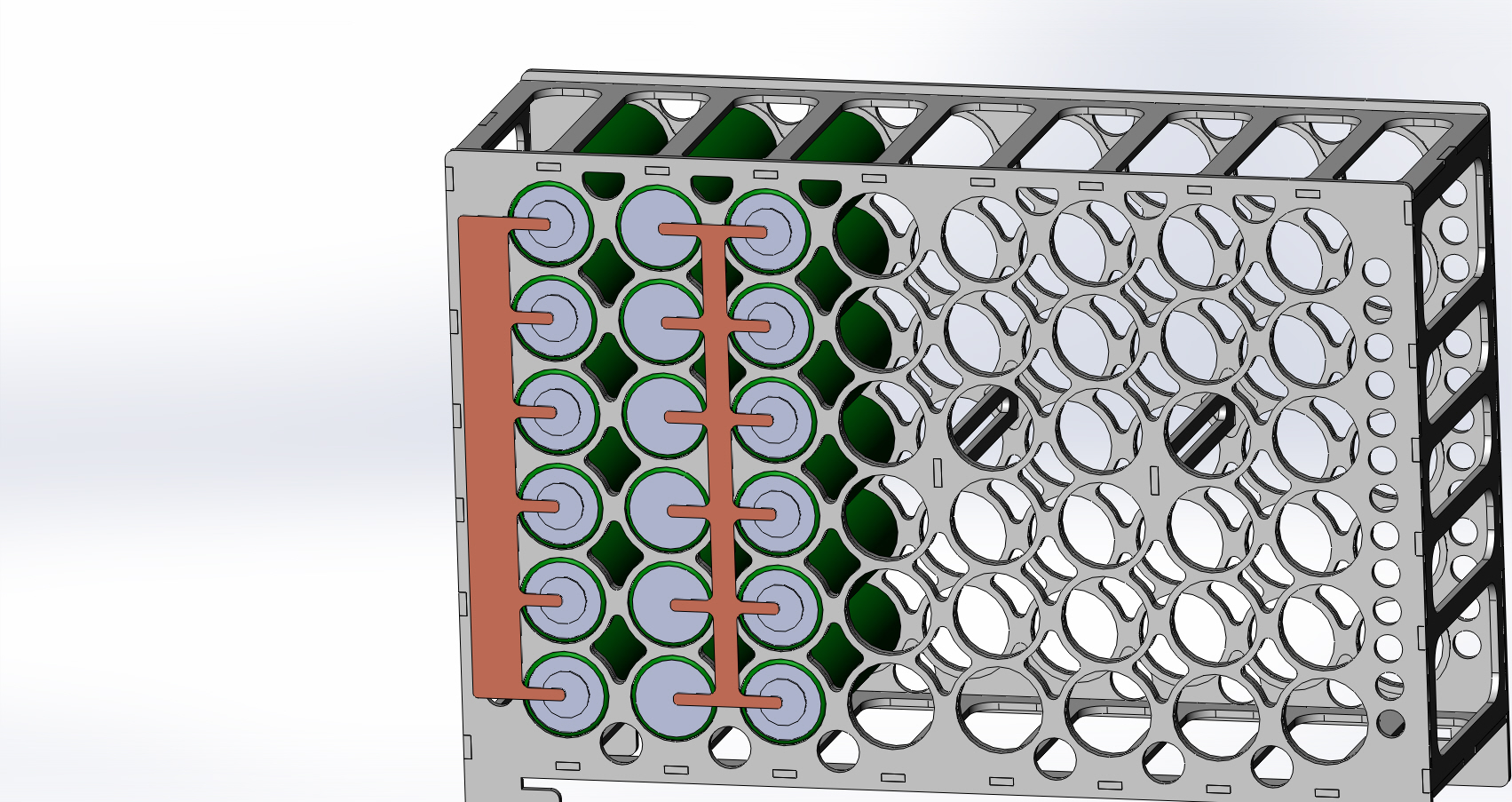

Hasilnya, saya menerima tiga baterai konfigurasi 8S6P dengan arus kontinu maksimum 120 A dan kapasitas 15 Ah. Menghapus arus maksimum yang diijinkan dimungkinkan karena pembersihan yang baik dari elemen yang dipasang dengan celah udara di aliran dari sekrup. Setelah puas dengan variasi minimum dalam kinerja, Samsung. Berat akhir perakitan pada braket 7800 gram, hampir memenuhi yang direncanakan.

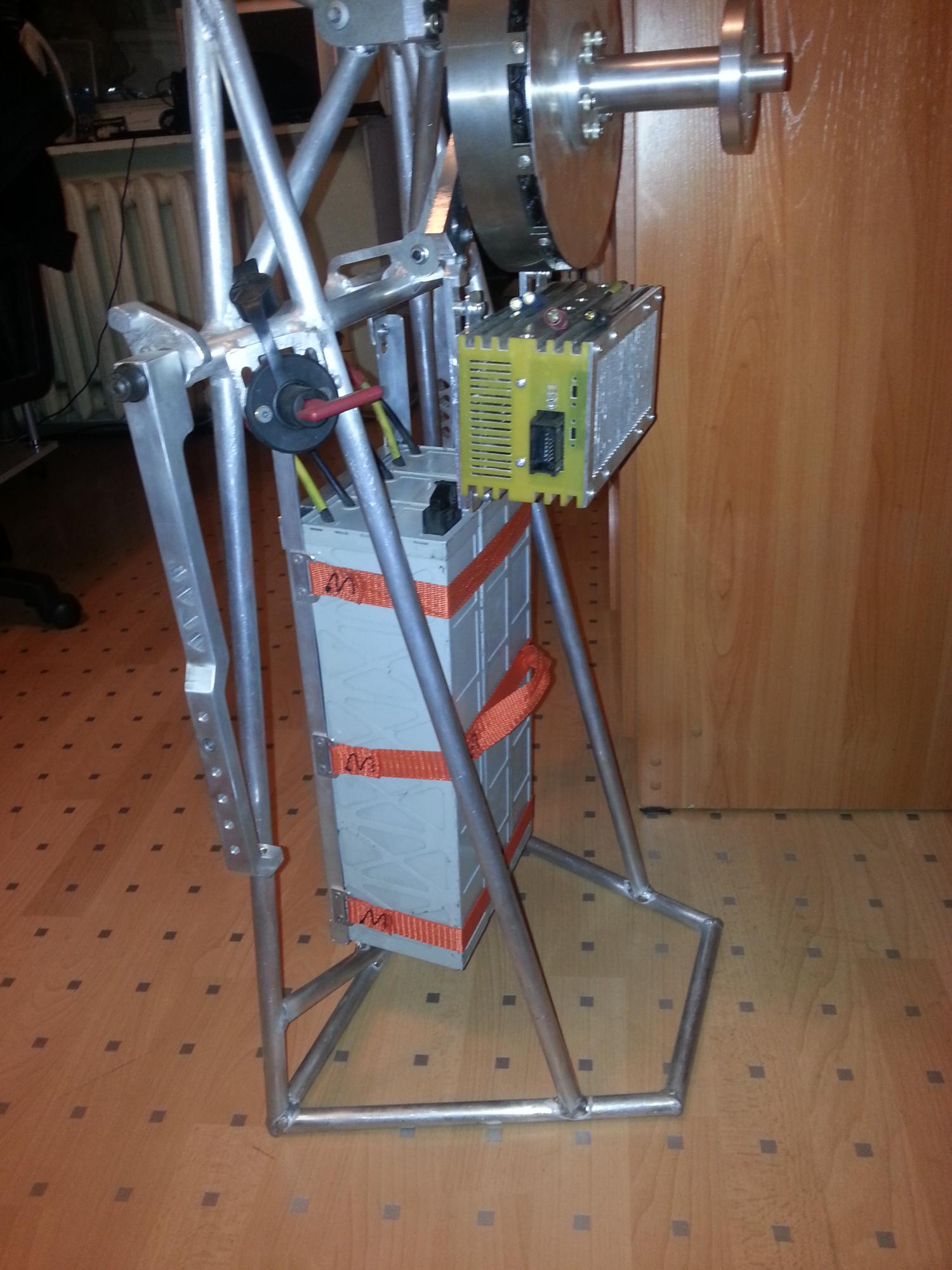
Sisanya adalah masalah teknologi, dilas bingkai cahaya, digiling baling-baling. Massa akhir pemasangan adalah 25 kg, diameter baling-baling adalah 1,25 m.


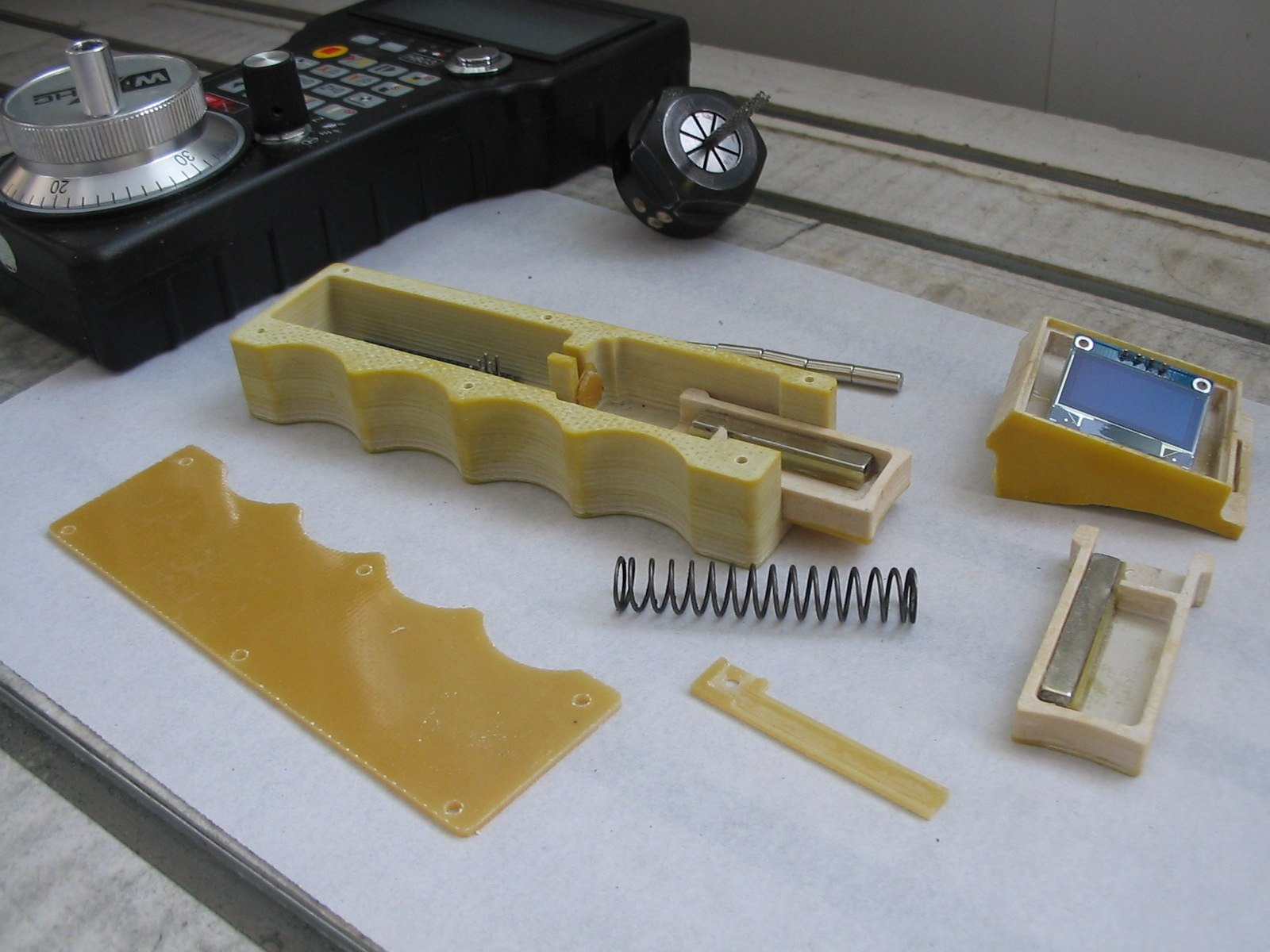
Oh ya, sebagai ceri pada kue saya membuat ORE dengan komunikasi CAN, sepertinya lebih aman dan lebih menarik, karena pengontrol mesin memungkinkan.
Pada akhir Oktober, ia melakukan beberapa pelepasan baterai di tanah, kemudian uji terbang. Karakteristik yang diinginkan telah dicapai secara umum, saya berencana untuk menghilangkan beberapa hal kecil pada musim panas mendatang dan kemudian terbang sepenuhnya, sekarang tidak ada cuaca terbang.
Dengan demikian, instalasi listrik ransel tidak lebih dari mainan dibandingkan dengan model bensin, kurang daya cengkeram, dan yang paling penting waktu penerbangan motor dengan berat yang dapat diterima, menghilangkan kelebihannya. Namun, semuanya akan berubah jika Anda mengintegrasikan unit daya ke dalam sistem suspensi untuk penerbangan non-bermotor gratis, pasang baling-baling lipat tanpa pagar, sambil menjaga berat 20 kg.
Banyak desainer telah pergi dengan cara ini, ada beberapa kesulitan di sini, baling-baling jarak jauh tanpa pagar membutuhkan penyesuaian dan kontrol dari kecenderungan sumbu rotasi. Kalau tidak, komplikasi yang tidak menyenangkan mungkin terjadi saat peluncuran atau dalam penerbangan. Saya memiliki beberapa prestasi, tetapi sejauh ini saya belum memutuskan apakah akan melanjutkannya lebih jauh.


Proyek ini memakan waktu dua tahun aktivitas santai di waktu luang saya, berkat itu saya menguasai CNC dan memutar, pengelasan argon, memperbarui pengetahuan saya dalam drive listrik, elektronik daya dan banyak lagi. Menghabiskan waktu dan uang tidak disayangkan, saya mendapat banyak kesenangan kreatif.

Mengenai penerbangan itu sendiri, selama dua tahun saya telah memperketat keterampilan saya sebagai pilot gratis, dan terbang dengan motor sekarang tidak benar-benar menarik, terutama untuk perubahan. Tetap saja, penerbangan terjadwal gratis adalah sesuatu yang istimewa, terutama ketika itu berhasil. Dalam menit-menit ini, dan sekarang bahkan berjam-jam, perasaan mencapai konsentrasi tertinggi, pikiran memproses banyak informasi yang diterima dalam waktu nyata, pengalaman menjaganya dari tindakan yang tidak masuk akal, dan keinginan akan memaksa Anda untuk pindah ke penemuan baru di wilayah udara yang indah ini.

Semua penerbangan aman!
Menambahkan
video dari penerbangan uji kedua, pilot dengan berat 95 kg.