
Kemajuan dalam kendaraan tak berawak telah meningkat pesat dalam beberapa tahun terakhir. Mulai 1 Desember 2018, drone
akan dapat bergerak bebas di sepanjang jalan umum di Moskow dan Tatarstan. Tampaknya sedikit lebih dan kita bisa masuk ke mobil dan melakukan bisnis kita sendiri, sementara transportasi kita akan mengambil alih manajemen seluruh proses mengemudi. Mimpi, mimpi, tetapi mobil apa yang benar-benar mampu dan akankah ia menggusur seseorang?
Di jalan menuju otonomi penuh
Komunitas internasional insinyur otomotif (SAE International) telah mengembangkan klasifikasi otonomi mobil enam tingkat. Sistem ini menunjukkan jalan yang telah dilalui mobil dalam beberapa dekade terakhir, dan menggambarkan kesulitan yang belum terpecahkan untuk menciptakan kendaraan yang benar-benar tak berawak.
Level 0 - tidak ada otonomi. Semua mesin yang tidak mengganggu proses kontrol dapat dikaitkan dengan level ini. Tanpa seorang pria, mobil seperti itu tidak akan bergerak dan tidak akan dapat menghindari kecelakaan. Sensor ABS atau parkir - hanya itu yang dapat Anda harapkan dari mobil level nol.
Level 1 - bantuan minimal. Termasuk mobil yang dapat menyetir kemudi atau akselerasi / pengereman dengan pemantauan konstan oleh pengemudi. Ini juga termasuk sistem bantuan parkir ketika mobil sedang mengemudi dan pengemudi sedang mengayuh.
Level 2 - bantuan dengan perhatian pengemudi. Pada tingkat kedua, ada otomatisasi penuh proses sederhana yang membutuhkan kemudi otomatis dan kontrol gerakan secara bersamaan. Ini termasuk Advanced Driver Assistance Systems (ADAS) tingkat lanjut.
Level 3 - autopilot terbatas. Tingkat perbatasan di mana sudah dimungkinkan untuk berbicara tentang autopilot sepenuhnya yang beroperasi dalam kerangka skenario individu. Tidak seperti mobil di lantai dua, mobil di lantai tiga tidak membutuhkan perhatian terus menerus dari pengemudi - seseorang dapat menjalankan bisnisnya, tidak meraih kemudi setiap setengah menit.
Level 4 - autopilot di kota-kota. Mobil tingkat keempat berbeda dari autopilot absolut (tingkat 5) karena mereka membutuhkan peta medan 3D yang dengannya mobil akan diperiksa saat mengemudi, memindai medan. Jika mobil tingkat keempat berada di area yang tidak ada di peta tersebut, autopilot akan masuk ke mode tingkat ketiga atau sepenuhnya dimatikan.
Level 5 - autopilot penuh. Autopilot bola yang sama dalam ruang hampa udara yang dapat bergerak dalam cuaca apa pun dan di mana pun di dunia: apakah itu jalan rusak tanpa tanda, pembukaan hutan, jalur gunung bersalju, kota metropolitan yang sibuk - autopilot tingkat kelima akan pergi ke mana-mana, menganalisis situasi saat bepergian. Dia tidak perlu menyiapkan kartu 3D - mobil tingkat lima otonom dengan keahliannya sesuai dengan pengemudi yang masih hidup.
Bagaimana cara kerja mobil otonom nyata?
Prosesor kamera + gambarKetika mengembangkan kendaraan tak berawak penuh yang pertama, kamera adalah cara utama untuk memahami ruang di sekitar mobil. Mereka memungkinkan untuk mendapatkan gambar dengan cepat dalam rentang yang terlihat dengan sudut pandang lebar. Namun, gambar kamera tunggal tidak cukup untuk mobil otonom berfungsi dengan sukses, drone membutuhkan analog elektronik otak manusia, yaitu, prosesor pemrosesan gambar khusus.
Penciptaan prosesor semacam itu dilakukan oleh perusahaan besar dan pemula yang berpengalaman, misalnya Mobileye, yang telah menjadi bagian dari Intel, NVIDIA. Perkembangan serupa terjadi di Toshiba. Rangkaian prosesor
Toshiba Visconti memproses gambar dari empat kamera, mengevaluasi gambar sekaligus berdasarkan berbagai kriteria: penandaan, mobil yang bergerak dan parkir, lampu lalu lintas dan rambu, lampu depan, pejalan kaki, dan pengendara sepeda. Setelah mengidentifikasi dan mengklasifikasikan objek pada video, prosesor mentransmisikan informasi ke "otak" mesin, yang autopilot-nya sudah menentukan perilaku optimal. Ini adalah cara kerja sistem bantuan pengemudi ADAS yang diperluas, mencegah tabrakan dan tabrakan dengan pejalan kaki (kriteria otonomi tingkat kedua).
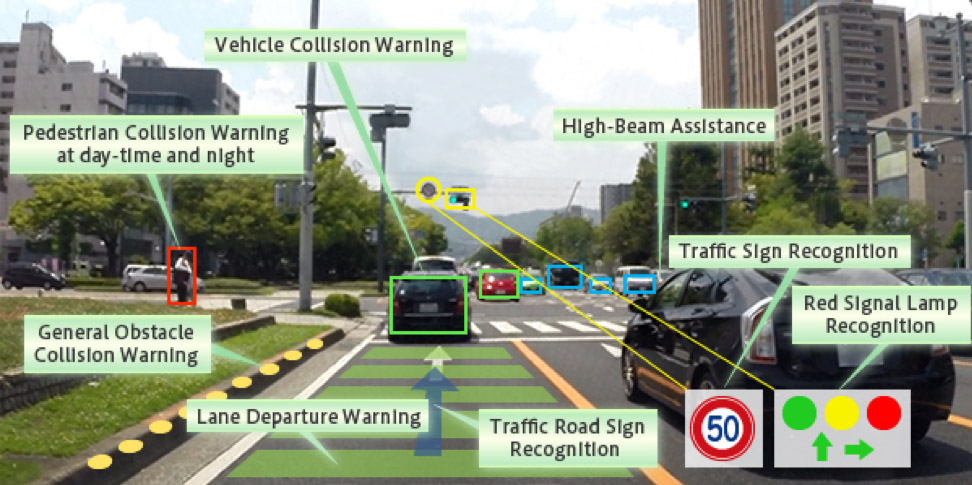 Sekumpulan kamera dan prosesor Toshiba Visconti memonitor situasi lalu lintas dengan lebih baik dan lebih penuh perhatian daripada seseorang. Sumber: Toshiba
Sekumpulan kamera dan prosesor Toshiba Visconti memonitor situasi lalu lintas dengan lebih baik dan lebih penuh perhatian daripada seseorang. Sumber: ToshibaSiklus penuh Toshiba Visconti generasi sebelumnya dari akuisisi gambar hingga penerbitan informasi dengan hasil pengenalan membutuhkan waktu hingga 100 ms. Dalam Visconti 4, siklus dikurangi menjadi 50 ms. Dalam kasus terbaik, waktu respons pengemudi adalah 500 ms. Selama waktu ini, mobil yang melaju dengan kecepatan 80 km / jam akan melewati 11 meter - jarak yang jauh jika terjadi situasi berbahaya di jalan.
Visconti juga memecahkan masalah penglihatan monokular - prosesor mampu membangun rekonstruksi ruang tiga dimensi, menganalisis urutan bingkai selama gerakan. Ini berfungsi baik untuk objek yang bergerak maupun yang diam di jalan dan di luarnya.
RadarKamera tidak dapat mengenali objek jarak jauh dan membuat peta terperinci, di samping itu, fungsinya secara langsung tergantung pada kondisi cuaca. Kekurangan ini dapat dikompensasi oleh radar yang memancarkan sinyal radio dengan frekuensi puluhan gigahertz. Mereka idealnya mengidentifikasi hambatan di ruang angkasa. Radar dengan frekuensi 24 GHz dan 77 GHz sudah digunakan dalam sistem ADAS yang mahal untuk pengereman awal saat mendeteksi persimpangan pos dengan pejalan kaki atau mobil lain. Tidak seperti kamera, radar memiliki sudut aksi yang sangat sempit, berbanding terbalik dengan rentang yang diinginkan. Selain itu, radar memiliki biaya tinggi (pada level $ 1.000), yang segera membatasi rentang penggunaannya secara eksklusif oleh mobil-mobil representatif dan premium.
Radar melakukan pekerjaan yang sangat baik untuk melokalisasi objek, tetapi tanpa menentukan bentuknya dan hanya dalam kisaran yang sempit.LidarLidar dianggap yang paling efektif, tetapi pada saat yang sama sensor paling kontroversial untuk mobil otonom. Mereka membangun gambaran rinci tentang dunia di sekitar mereka dengan bantuan sinar laser yang tercermin dari rintangan dan kembali. Selain itu, lidar melakukan ini dengan akurasi yang tidak dapat dicapai untuk sensor lain. Menggunakan lidar, sebuah mobil membuat peta 3D-nya sendiri puluhan meter di sekitarnya, mengenali mobil, orang, dan halangan apa pun.
Begitu melihat dunia mobil dengan lidarNamun, lidar memiliki lebih banyak kekurangan daripada kelebihannya. Pertama, sungkup menjadi tidak berdaya dalam hujan lebat atau selama salju - sinar laser tercermin dari tetesan air dan serpihan salju. Kedua, lidar harus memiliki pandangan melingkar penuh, yang berarti bahwa ia menciptakan "punuk" di atap mobil. Ketiga, lidar tidak hanya mahal, tetapi sangat mahal: model Velodyne awal berharga $ 75.000, desain Waymo modern berharga $ 7.500.
 Garis lidars Velodyne. Sumber: Velodyne
Garis lidars Velodyne. Sumber: VelodyneMunculnya "solid-state" lidars tanpa bagian yang bergerak harus mengurangi biaya perangkat dengan pesanan besar di tahun-tahun mendatang. Velodyne mengklaim telah membuat terobosan yang akan mengurangi harga lidar menjadi $ 50.
Toshiba, pada gilirannya, bekerja untuk meningkatkan efektivitas kapel. Jadi, tahun ini
chip baru diperkenalkan yang menggabungkan rantai untuk menganalisis data pada jarak jauh dan pendek. Ini memungkinkan kami untuk menggandakan kisaran efektif lidar menjadi 200 m, serta untuk menyingkirkan masalah silau, yang memengaruhi kualitas pantulan.
Bagaimana cara kerjanya untuk ...
... Tesla
Untuk menerapkan autopilot, sistem delapan kamera dengan sudut pandang dan jarak pandang yang berbeda, 12 sensor ultrasonik dalam lingkaran dan radar frontal jarak jauh dipasang di mobil Tesla. Sensor ultrasonik bertanggung jawab untuk mengenali mobil di barisan dan hambatan yang berdekatan saat berkendara dengan kecepatan rendah. Kamera bertanggung jawab untuk menemukan pejalan kaki, mobil, tanda dan tanda. Bantu mereka dalam radar ini. GPS digunakan untuk bergerak di sepanjang rute, dan sensor memonitor bahwa mobil berjalan ketat di jalur dan menghindari kecelakaan. Di satu sisi, ini memungkinkan Anda untuk menggunakan Tesla autopilot di kota mana pun. Di sisi lain, untuk operasi, autopilot masih membutuhkan perhatian pengemudi.
Tesla sengaja tidak menggunakan lidar, Elon Musk secara terbuka menentang lidar, membenarkan ini dengan harga dan pekerjaan bermasalah dalam cuaca buruk. Sulit untuk tidak setuju dengannya - tambahan 7-10 ribu dolar untuk harga dan "punuk" di atap tidak akan menambah daya tarik Tesla.
Tidak peduli seberapa baik sekelompok kamera, radar, dan sensor ultrasonik terlihat, dan mereka memiliki kerusakan. Pada tahun 2018, Tesla Model S dalam mode autopilot menabrak pembagi jalan, yang menyebabkan kematian pengemudi. Seperti yang
diinvestigasi oleh pemilik mobil listrik, Tesla autopilot tidak dapat dengan benar membaca tanda yang terhapus, dan kamera dan radar, pada gilirannya, tidak melihat bahaya dalam penghalang baja yang mendekat dengan cepat.
... WaymoSistem Waymo menggunakan lidar, lima radar, delapan kamera dan GPS, dan Chrysler Pacifica Hybrid (sekarang 600, direncanakan untuk membeli 62 ribu unit) dan Jaguar I-PACE (20 ribu unit dalam rencana) dipilih sebagai pembawa komersial serial.
 Mobil listrik Waymo Jaguar I-PACE tidak se-utilitarian Chrysler Pacifica yang luas, tetapi kelihatannya menakjubkan - bahkan kelopak di atap tidak merusak pemandangan. Hak Cipta: Waymo
Mobil listrik Waymo Jaguar I-PACE tidak se-utilitarian Chrysler Pacifica yang luas, tetapi kelihatannya menakjubkan - bahkan kelopak di atap tidak merusak pemandangan. Hak Cipta: WaymoSaat mengemudi, Waymo menggunakan data Google Street View, merujuk padanya menggunakan sensornya. Berkat ini, otonomi lengkap tercapai - tidak seperti Tesla, mobil Waymo benar-benar tidak memerlukan intervensi pengemudi, tetapi hanya membawa penumpang. Tidak seperti Tesla, Waymo tidak menjual mobil, tetapi layanan transportasi, yaitu robot.
Video panorama Waymo membantu Anda memahami bagaimana mobil otonom Anda mengenali lingkungan Anda.Kelemahan utama dari Waymo adalah daftar kota yang sangat terbatas tempat drone beroperasi - agar autopilot berfungsi dengan benar, lingkungan perkotaan harus diambil dalam 3D, dan ini adalah prosedur yang panjang dan rumit, sehingga Waymo saat ini beroperasi hanya di dua lusin kota di Amerika. Namun, perluasan jaringan jalan hanya tinggal menunggu waktu. Selamat bersenang-senang.
... YandexYandex mempresentasikan proyek kendaraan tak berawaknya setahun yang lalu. Satu blok lidar, kamera, radar, GPS dan IMU, yaitu, komponen-komponen khas mobil otonom, dipasang pada Toyota Prius. Dari Yandex, drone tersebut mendapatkan platform perangkat lunak yang menunjukkan dirinya dengan baik saat berkendara di sepanjang jalan Moskow yang sempit di distrik Khamovniki, dan ketika melakukan perjalanan jarak jauh dari Moskow ke Kazan.
Setelah mencapai Tatarstan, mobil Yandex tetap di sana, menjadi taksi tak berawak pertama di Rusia. Sekarang dia bekerja di kota Innopolis, mengangkut penumpang di antara lima titik utama. Dan pada bulan Oktober, taksi serupa muncul di wilayah Skolkovo. Dalam rencana yang jauh dari perusahaan untuk membawa taksi tak berawak ke jalan-jalan kota secara komersial.
... KAMAZPada tahun 2016, NAMI State Institute menunjukkan “minibus” tak berawak SHATL, yang pada waktu itu tidak lebih dari sebuah mobil konsep eksperimental. Dua tahun kemudian, KAMAZ-1221 SHATL dinyatakan sebagai proyek seri di masa depan, yang akan diletakkan di conveyor pada tahun 2022. Bus mini-listrik dengan sungkup, kamera dan sensor ultrasonik sejauh ini bergerak dengan hati-hati pada kecepatan 10 km / jam, tetapi ketika platform perangkat lunak membaik, kecepatan dijanjikan akan ditarik hingga 110 km / jam.
Apa yang akan berubah drone?
Pengecualian faktor manusia akan meningkatkan kondisi operasi marginal mobil - meningkatkan kecepatan maksimum, mengurangi lebar lajur, mengurangi jarak antara mobil dalam arus. Akibatnya, throughput jalan akan meningkat secara signifikan, kecepatan rata-rata akan meningkat dan jumlah kemacetan akan berkurang.
Menurut American Highway Capacity Manual, satu lajur jalan raya per jam melewati sekitar 2.200 mobil yang dikendarai orang. Berbagai penelitian menunjukkan bahwa transisi ke mobil otonom akan meningkatkan angka ini menjadi 7200-12000 mobil per jam. Lompatan yang mengesankan dalam efisiensi penggunaan jalan dicapai dengan meningkatkan kecepatan aman dan mengurangi jarak antara mobil di jalur dari 40-50 meter menjadi 6-7 meter - untuk mobil yang mengirimkan informasi tentang kecepatan dan perkiraan manuver satu sama lain, jarak seperti itu akan cukup untuk keselamatan pergerakan.
Namun, kami masih jauh dari masa depan yang tak berawak. Mobil berseri dari pembuat mobil terkenal baru saja mengadaptasi otonomi tingkat kedua, model terbaik dan termahal sedang bersiap untuk melangkah ke tingkat ketiga. Tetapi dalam dekade berikutnya, tidak ada gunanya memimpikan drone dari tingkat otonomi kelima - untuk waktu yang lama seseorang akan menjadi yang utama di jalan.