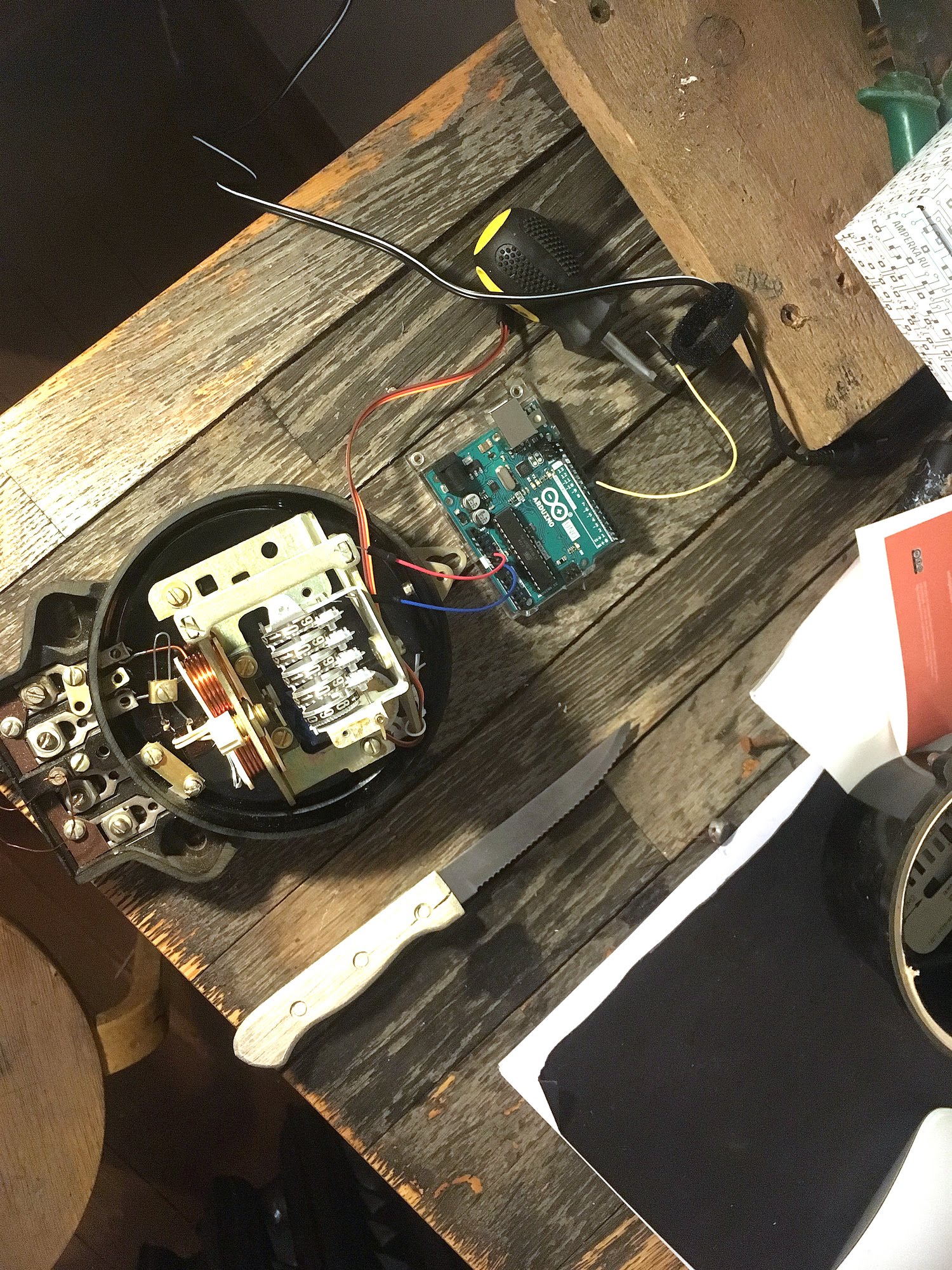
Kami membuat halaman fisik seperti penghitung di Facebook. Dari meteran listrik tua. Pada intinya adalah papan Iskra Neo yang dapat diprogram dari Amperka (analog dengan Arduino) dan servomotor rotasi konstan.

Untuk mengamati perkembangan suka, kami menaruh kamera online yang ditujukan ke konter, dan mengeluarkan tombol Suka di blog. Saya juga suka berurusan dengan elektronik dan mengelola berbagai hal melalui Internet.
Ini adalah pengalaman pertama.
Bagaimana ini dilakukan
Elektronik untuk menerima suka telah dirakit dan diuji dalam proyek Amperka, itu sudah cukup untuk mengumpulkannya. Ternyata itu tidak mudah ketika saya ingin melakukan segalanya pada Arduino Uno, bukan Spark. Itu tidak berhasil karena berbagai prinsip bekerja dengan UART (modul WiFi menerima sinyal melalui itu). Agar tidak menulis perangkat lunak UART, saya harus mencetak skor pada Arduino dan menggunakan Iskra Neo asli.
Modul tidak dapat meminta jumlah suka langsung dari halaman fb, karena tidak berfungsi dengan HTTPS. Untuk menyiasati pembatasan server, skrip PHP ditutup yang mengenali jumlah suka dan dikeluarkan sebagai variabel. Dan modul sudah mengakses alamat skrip PHP ini menggunakan
perintah AT (ingat, sebelum modem bisa mengatakan ATDP XXX, di mana XXX adalah nomor telepon, dan ia mulai memanggilnya? Ini adalah mereka)
Elektronik sudah siap, saya membagi tugas yang tersisa menjadi dua bagian:
- Drive meter
- Program manajemen
Drive meter
Akan bagus untuk membuat solusi elegan untuk menghubungkan meteran dengan pasokan arus ke gulungan asli. Maka dimungkinkan untuk meninggalkan disk yang berputar, dan mengganggu desain seminimal mungkin. Tetapi ini sulit untuk diimplementasikan, jadi mereka menunda ke versi berikutnya. Sekarang di konter, motor servo rotasi konstan terpasang langsung ke roda gigi yang memutar konter.


Program manajemen
Pertama, saya menghitung berapa milidetik yang diperlukan untuk menghidupkan motor sehingga mengubah revolusi satu disk. Ternyata sekitar 1650 ms. Segera menjadi jelas bahwa angka ini berubah dari tegangan di jaringan (dan untuk beberapa alasan kadang-kadang melompat), dan dari berjalan di roda penghitung. Mereka dikembangkan sekitar 50 tahun yang lalu, dan plus atau minus setengah digit tidak berperan saat itu.

Program perlu mengetahui apa yang ditunjukkan oleh penghitung, dan setidaknya kita harus dapat memperbaikinya secara manual. Untuk mengetahui jumlah pasti derajat di mana motor memutar roda, Anda akan memerlukan sensor seperti sensor posisi throttle pada mobil, itu sulit.
Oleh karena itu, dalam versi pertama, untuk mengontrol keakuratan bacaan, ada layar elektronik di sebelah penghitung dan dua tombol yang dapat digunakan untuk memperbaiki penghitung secara manual jika telah terjadi kesalahan. Mode semi-manual, dan apa yang harus dilakukan.
Program ini menyediakan variabel yang menyimpan jumlah suka di penghitung fisik. Ketika daya dimatikan, disimpan di EPROM dan ketika dinyalakan, diambil kembali dari sana.
Ini diperlukan agar ketika terputus dari jaringan mereka tahu berapa banyak penghitung perlu diperbaiki.
Apa hasilnya?
Hasilnya adalah benda seni keren. Sebelum memasang kamera dan menggantungnya di dinding di kamar kami, kami mempostingnya untuk ditinjau di zona kerja bersama.
Dia masih jauh dari sempurna. Kurang akurat, ketika daya dihidupkan, motor servo kadang-kadang mulai berputar dengan sendirinya dan tidak ada disk yang berputar asli.
Kami akan menyelesaikan dalam versi berikutnya.