Halo semuanya!
Pertanyaan tentang perkembangan fisik anak-anak mereka sendiri selalu relevan. Putra bungsu berusia tiga tahun, selain berjalan, ia ingin menemukan kelas untuknya dengan bias olahraga. Karena dia tertarik pada berbagai jenis transportasi, pilihannya secara alami jatuh pada runbike. Dan setelah menonton video pembakar, ketika anak-anak yang lebih tua berhenti menggunakan runbikes, saya memutuskan untuk menyelidiki masalah ini sedikit lebih detail. Berbekal IMU dari Amperka dengan 10 derajat kebebasan, Raspberry Zero W dengan catu daya dan 40 baris kode dengan Python, saya pergi ke sekolah lari. Apa yang terjadi - lihat di bawah luka)

Runbikes tidak seluas sepeda anak-anak atau skuter, tetapi mereka memiliki beberapa keunggulan dibandingkan moda transportasi lainnya. Anak bisa duduk di atas sadel, seperti di atas sepeda dan mendorong dengan dua kaki secara bergantian. Ini memberi beban yang lebih seragam pada kedua kaki dan punggung. Tidak seperti skuter, di mana hanya satu kaki yang bekerja. Bonus tambahan adalah bahwa anak belajar menyeimbangkan. Artinya, transfer lebih lanjut ke sepeda roda dua seharusnya terjadi tanpa komplikasi.
Pada dasarnya, desain runbikes cukup sederhana. Ini adalah kerangka logam (aluminium atau baja), roda kemudi, sadel dan dua roda (dipompa untuk model yang lebih mahal atau terbuat dari karet busa). Ada beberapa model dengan suspensi roda belakang.

Redaman roda belakang bagi saya terasa sangat penting. Seorang anak di atas sepeda pacu pasti akan melompat dari trotoar dan naik di jalan yang kasar (kita tinggal di Rusia). Karena itu, keberadaan damper secara teori harus mengurangi beban di bagian belakang. Di masa depan, ketika profesionalisme pembalap muda tumbuh, peredam juga akan memungkinkan
melompat dan trik serupa lainnya .
Setelah mencari-cari di internet, saya menemukan bahwa sebelumnya tidak ada yang menghitung beban yang jatuh pada kerangka sepeda motor ketika melompat dari berbagai rintangan. Ketertarikan pada masalah ini dan sedikit waktu luang memunculkan fakta bahwa saya mengumpulkan dari bahan-bahan yang ada di stand sederhana untuk pengukuran.
Akselerasi akan diukur dengan akselerometer tiga sumbu dari
sensor IMU yang diproduksi oleh Amperka. Tidak mungkin menggunakan accelerometer ponsel untuk mengukur akselerasi karena batas pengukuran yang rendah (+ -2G). Rentang pengukuran untuk masing-masing sumbu modul Amperka adalah + -8G, mari berharap ini cukup.
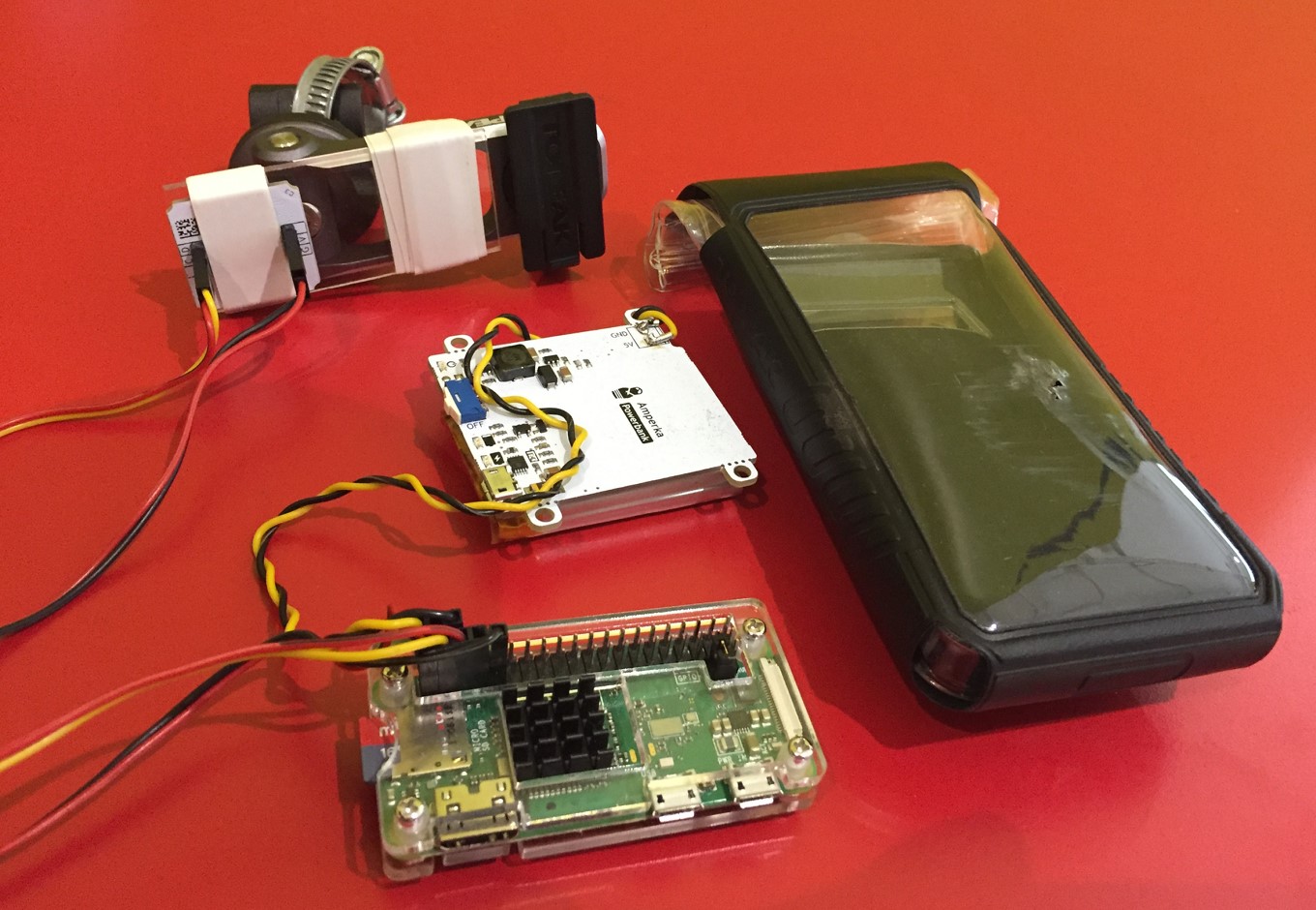
Sensor IMU dipasang pada bingkai menggunakan dudukan Topeak (saya harus melepas sementara dari sepeda saya), sepotong kaca plexiglass dan beberapa lapisan pita listrik. Single-board Raspberry Pi Zero W digunakan untuk menyurvei sensor. Sebuah skrip Python kecil menyurvei accelerometer dengan periode sekitar 10 ms:
imu.pyimport time from pytroykaimu import TroykaIMU imu = TroykaIMU() imu.accelerometer.set_range('8G') file_name = '' print(' ( )') file_name = str(input ()) file_name = file_name + '.csv' print(' , Ctrl+C') t0 = time.time() imu_array = [] while True: try: ax, ay, az = imu.accelerometer.read_gxyz() gx, gy, gz = imu.gyroscope.read_radians_per_second_xyz() imu_array += [time.time(), ax, ay, az, gx, gy, gz] time.sleep(0.006) except KeyboardInterrupt: t1 = time.time() lines = int(len(imu_array)/7) print(" - -", lines, '- ', file_name) imu_file = open(file_name, 'w') imu_file.write('time,ax,ay,az,gx,gy,gz' + '\n') for i in range(lines): imu_file.write(str(imu_array[7*i]) + ',' + str(imu_array[7*i+1]) + ',' + str(imu_array[7*i+2]) + ',' + str(imu_array[7*i+3]) + ',' + str(imu_array[7*i+4]) + ',' + str(imu_array[7*i+5]) + ',' + str(imu_array[7*i+6]) + '\n') imu_file.close() print (' , -', t1 - t0, '') break
Power Raspberry telah dihapus dari
Power Bank dari Amperka yang sama , dan saya melakukan start jarak jauh dari sel dengan terminal yang dipasang bukan untuknya. Saya menyembunyikan papan tunggal dengan catu daya di dalam case untuk ponsel, dan memasang sensor IMU ke seatpost dari runbikes yang dipelajari sebagai berikut:

Kami melakukan pengukuran bersama dengan Evgeny Ivanov dari
sekolah BegovelMsk di Moskow . Sekolah lari untuk ujian dengan ramah menyediakan dua sepeda motor (
Puky LR Ride dan
Early Rider Trail Runner 14 ). Kedua model ini biasa digunakan di sekolah lari, yang pertama - terutama untuk trik, yang kedua - untuk sepeda yang berjalan. Ban untuk kedua model meningkat hingga sekitar 3,5 atmosfer.
Tes tersebut terdiri dari fakta bahwa pengendara Artyom melompat dari batu loncatan kecil di atas runbike yang diuji:

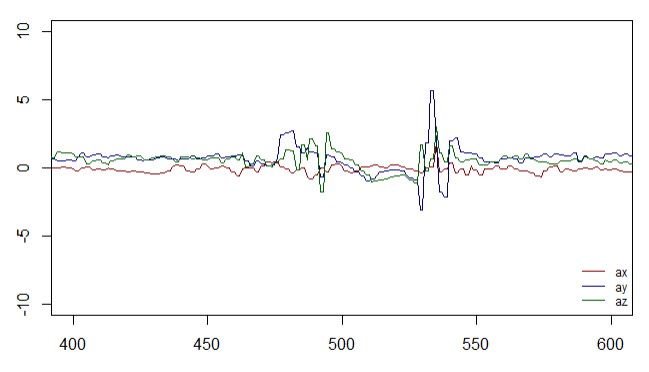
Akibatnya, untuk setiap lompatan pada kartu SD, Raspberry menyelesaikan file dengan jajak pendapat dari ketiga sumbu accelerometer setiap 10 ms. Grafik seperti itu dapat diturunkan dari setiap file, percepatan dalam G diplot sepanjang sumbu vertikal:
Grafik untuk lompatan yang sama ternyata sangat mirip, tetapi kurva akselerasi untuk dua model runbikes yang dipelajari sangat berbeda. Untuk menyederhanakan gambar, hanya komponen vertikal percepatan yang diplot dalam grafik berikut (untuk percobaan kami, ini adalah sumbu Y dibagi dengan kosinus sudut penyimpangan dari vertikal). Grafik juga menunjukkan waktu kedatangan di loncatan (ditentukan oleh video balapan) dan waktu menyentuh lantai setelah lompatan (ini adalah sinyal maksimum dalam amplitudo).
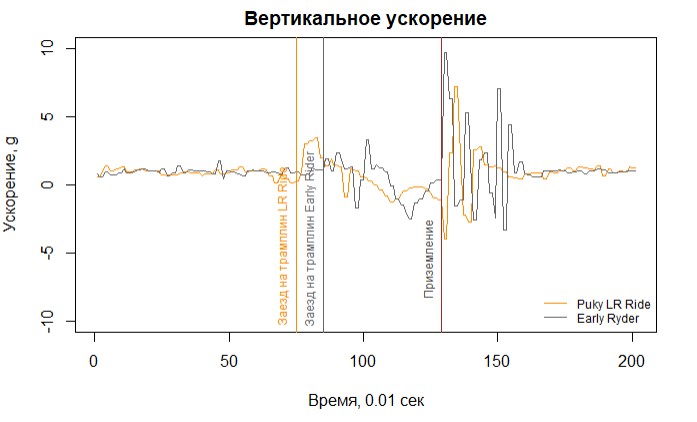
Seperti yang Anda lihat, bingkai berjalan (dan dengan itu anak) ketika melompat dari loncatan itu mengalami beban kejut jangka pendek hingga 10G! Tanpa diduga. Saya pikir bebannya jauh lebih rendah. Dapat disimpulkan bahwa tidak layak berlari di tepi jalan sambil duduk sebagai poin ke-5 di atas sadel. Kalau tidak, pukulan akan jatuh pada tulang belakang dan organ dalam anak. Akan lebih optimal untuk mentransfer beban ini ke kaki. Oleh karena itu, untuk model Puky LR Ride,
langkah khusus tersedia, di mana anak menjadi kaki saat melakukan trik.

Apa kesimpulan lain yang bisa ditarik dari kurva ini? Secara kasar berikut ini:
- Peredam pada LR Ride mengurangi beban kejut pada rangka pelari sekitar 30% (kemungkinan besar bahkan lebih, karena akselerometer jenuh pada rangka Trail Runner 14 yang kaku). Juga, sifat peningkatan perubahan beban, menjadi lebih halus daripada model tanpa peredam.
- Peredam membantu meningkatkan jarak lompatan, karena anak dapat menggunakannya sebagai semacam pegas di depan papan loncat (perhatikan kurva oranye sebelum memasuki papan loncat).
- Peredam meredam getaran sisa dari bingkai runbike, dapat diganti bahwa setelah melompat LR Ride jauh lebih kecil daripada Trail Runner 14, baik dalam waktu maupun dalam amplitudo. Ini meningkatkan penanganan runbike dan kenyamanan pengendara.
Hasil yang tak terduga ini menarik diperoleh dari satu percobaan sederhana. Pada akhirnya, saya sekali lagi mengucapkan terima kasih kepada sekolah lari, pembalap Artyom dan pelatih
Evgeny Ivanov .

Terima kasih telah membaca sampai akhir dan melihat Anda segera!