Mungkin setiap pengemudi dari waktu ke waktu mencoba untuk mengevaluasi keterampilan menyetirnya. Ketika Anda memberi tahu, katakanlah, anak-anak cara mengendarai mobil, Anda berpikir tentang bagaimana dan mengapa Anda tahu kapan mobil di depan akan belok kiri atau kanan. Mengapa perhatian secara otomatis difokuskan pada anjing yang berjalan di sepanjang jalan, tetapi tidak menanggapi ranting-ranting pohon yang tergantung di jalan. Ada banyak pertanyaan seperti itu, tetapi tidak semua dijawab.
Untuk mempelajari cara mengemudi, Anda perlu memahami banyak prinsip dan mengetahui aturan - ini berlaku untuk manusia dan kecerdasan buatan. Yang terakhir harus memperhatikan penilaian ribuan faktor - di mana dan kapan untuk memperlambat, di mana untuk mematikan, dan di mana untuk mempercepat.
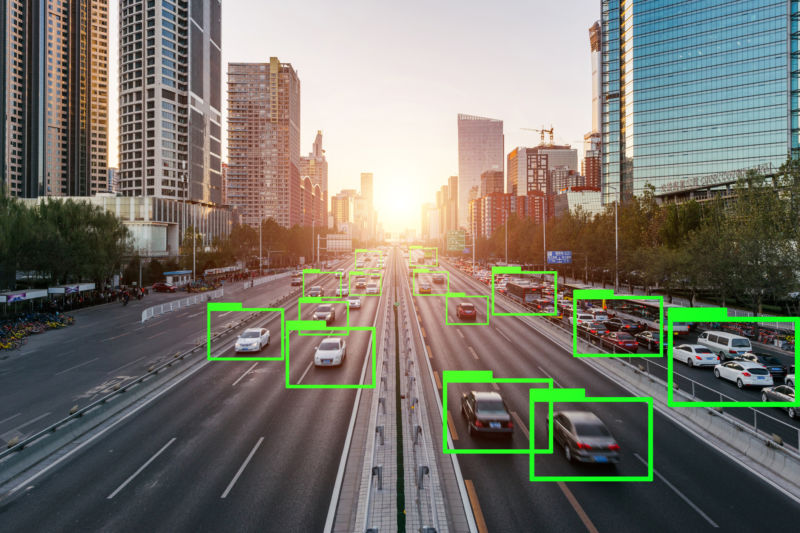
Mobil dengan tingkat otonomi tertinggi seharusnya tidak hanya mengenali tanda, sinyal, dan yang lainnya, tetapi juga dapat dengan cepat
menanggapi situasi yang tidak biasa, yang banyak di jalan. Bahkan robomobiles, yang perkembangannya telah bertahun-tahun, tidak selalu cukup menanggapi situasi seperti itu.
Contohnya adalah mobil robot Uber, yang perangkat lunaknya memutuskan untuk mengabaikan objek tersirat di jalan, yang ternyata adalah seorang wanita dengan pakaian gelap, dan bahkan dengan sepeda melintasi jalan di tempat yang salah.
Saat ini, sudah lazim untuk membedakan enam tingkat otonomi mesin - dari nol (semua operasi dilakukan oleh seseorang, tidak ada otonomi) hingga yang kelima (semua operasi dilakukan oleh komputer on-board tanpa campur tangan manusia). Dalam sebagian besar kasus, robot mobil mencapai tingkat otonomi kedua, termasuk Tesla yang terkenal jahat dengan autopilot canggihnya.
Daimler telah membuat kemajuan yang baik, tetapi tes robocars diadakan di Jerman, di mana marka jalan dan mereka sendiri hampir sempurna, dan pengemudi secara tradisional mengikuti aturan jalan.
Waymo juga membuat kemajuan yang baik - di hari lain, ia
mengumumkan peluncuran layanan robotax yang sepenuhnya otonom. Benar, pengemudi masih ada di kabin, yang disebut perusahaan sebagai "operator keamanan". Jika terjadi kesalahan, operator akan mengambil kendali. Kemungkinan besar, robot mobil dari tingkat otonomi yang lebih tinggi tidak akan muncul di jalan sampai 20-an, tapi mungkin. Dan kemudian.
Kemungkinan besar, otonomi lengkap hanya dapat dicapai setelah munculnya infrastruktur khusus, yang seharusnya hampir lebih pintar daripada robomobile itu sendiri. Yang terakhir harus secara mandiri belajar dan memahami apa yang terjadi di sekitar, lalu - mengambil keputusan tanpa partisipasi operator.
Contohnya adalah situasi ketika seorang penumpang bepergian dengan robomobile pada malam hujan. Tiba-tiba, seekor kucing melintasi jalan di depan. Apa yang harus dilakukan oleh robomobile? Jelas, sistemnya pasti harus mengenali hambatan di depan, sehingga mesin melakukan manuver yang diperlukan. Tetapi perlu untuk mengetahui aturan kecepatan setempat, untuk membayangkan seberapa licinnya aspal, ditambah untuk memahami di mana mobil saat ini. Sebagian informasi dapat diperoleh dari sumber pihak ketiga (prakiraan cuaca, suhu, kelembaban, dan kondisi angin yang sama), yang membutuhkan saluran Internet yang luas dan andal - kemungkinan besar, 5G.
Selain kucing, mungkin ada kendala lain di sekitarnya - misalnya, robomobiles, yang juga berusaha menghindari tabrakan. Artinya, robot mobil harus dapat "berkomunikasi" agar dapat mewakili tindakan masing-masing dengan baik pada waktu tertentu. Dan Anda perlu berkomunikasi secara real time. Kalau tidak, tabrakan tidak bisa dihindari, penuh dengan ancaman terhadap kesehatan dan kehidupan pemilik mesin.
Selain itu, robomobile juga harus dapat membuka jalur optimal ke titik akhir perjalanan. Ini berarti bahwa mesin memerlukan data peta, informasi markup, tanda dan informasi lainnya. Untuk memperluas jangkauan kemampuan robomobiles, mereka harus selalu berhubungan satu sama lain untuk bertukar informasi tentang lingkungan. Tetapi masih ada pertanyaan tentang mesin yang dikontrol orang, ternyata mereka juga harus dilengkapi dengan sistem komunikasi dengan robomobiles - jika tidak maka mesin tidak akan mengerti apa yang dilakukan oleh mesin sebelumnya.
Nah, jika Anda membayangkan sesuatu dapat terjadi dengan saluran komunikasi terluas, bahkan jika masalahnya bersifat sementara, situasinya menjadi semakin rumit. Dan kami belum pernah menyebutkan masalah biasa seperti "masalah troli", ditambah banyak masalah lainnya.
Kemungkinan besar, tingkat otonomi AI 4-5 tidak dapat diharapkan dalam beberapa tahun mendatang - mereka akan segera muncul.