Jika Anda membuka artikel ini, Anda mungkin sudah pernah mendengar tentang angka empat, dan mungkin bahkan menggunakannya dalam desain Anda. Tapi sekarang saatnya untuk naik ke level yang lebih tinggi - ke biquaternions.
Artikel ini memberikan konsep dasar tentang biquaternions dan operasi dengannya. Untuk pemahaman yang lebih baik tentang bekerja dengan biquaternions, contoh yang jelas dalam Javascript menggunakan Kanvas ditampilkan.
Biquaternion
Biquaternion adalah angka hiperkompleks yang memiliki dimensi 8. Dalam artikel dan literatur berbahasa Inggris, mereka disebut "angka empat ganda," dan dalam literatur berbahasa Rusia ada juga nama "angka empat ganda" atau "angka empat kompleks".
Perbedaan utama dari angka empat adalah bahwa angka empat menggambarkan orientasi objek di ruang, dan biquaternion juga menggambarkan posisi objek di ruang.
Biquaternion dapat direpresentasikan sebagai dua angka empat:
w i d e t i l d e t e x t b f q = b e g i n b m a t r i x t e x t b f q 1 t e x t b f q 2 e n d b m a t r i x ,
t e x t b f q 1 - bagian nyata, menentukan orientasi objek di ruang angkasa;
textbfq2 - bagian ganda, menentukan posisi objek dalam ruang.
Biquaternion juga disebut sebagai quaternion kompleks, dalam hal ini diwakili sebagai quaternion, masing-masing komponen yang merupakan bilangan ganda (tidak harus bingung dengan kompleks). Nomor ganda
A=a1+ epsilona2 dimana
a1 dan
a2 Apakah bilangan real, dan
epsilon - Simbol Clifford (kompleksitas), memiliki properti
epsilon2=0 . Kami tidak akan mempelajari matematika, karena kami lebih tertarik pada bagian terapan, oleh karena itu, lebih lanjut kami akan mempertimbangkan biquaternion sebagai dua angka empat.
Interpretasi geometris dari biquaternion
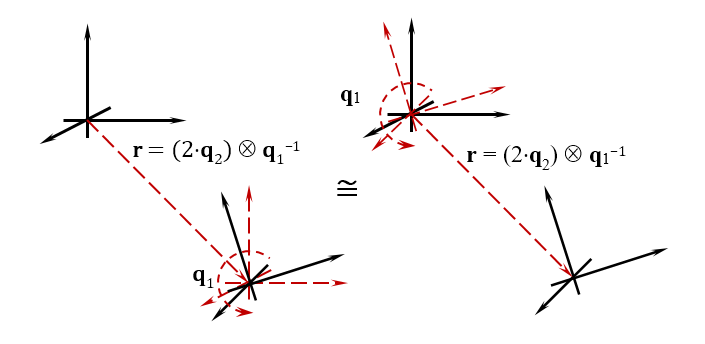
Dengan analogi dengan angka empat, dengan mana Anda dapat mengatur orientasi objek, biquaternion juga dapat mengatur posisi. Yaitu Biquaternion menetapkan dua nilai sekaligus - posisi dan orientasi objek dalam ruang. Jika kita mempertimbangkannya dalam dinamika, maka biquaternion mendefinisikan dua kuantitas - kecepatan gerak linier dan kecepatan sudut rotasi objek. Gambar di bawah ini menunjukkan arti geometris dari biquaternion.
Pengembang game tahu bahwa untuk menentukan posisi dan orientasi suatu objek di ruang game, matriks rotasi dan matriks perpindahan digunakan, dan, tergantung pada urutan penerapannya, hasil dari posisi akhir objek berbeda. Bagi mereka yang terbiasa membagi gerakan menjadi operasi terpisah, terima aturan untuk bekerja dengan biquaternions: pertama-tama kita memindahkan objek, lalu kita memutarnya. Faktanya, Anda menggambarkan dua gerakan ini dengan satu angka, meskipun hypercomplex yang kompleks.
Karakteristik skalar
Pertimbangkan karakteristik skalar utama. Di sini perlu untuk memperhatikan fakta bahwa mereka mengembalikan bukan bilangan real biasa, tetapi dua.
1. Norma biquaternion
| widetilde textbfq |= | textbfq1 |+ epsilon(q10q20+ textbfqT1 textbfq2)
2. Modul Biquaternion
| widetilde textbfq|=| textbfq1|+ epsilon fracq10q20+ textbfqT1 textbfq2| textbfq1|
Operasi dasar
Pertimbangkan operasi dasar bekerja dengan biquaternions. Seperti yang Anda lihat, mereka sangat mirip dengan operasi serupa dengan angka empat.
1. Pasangan Biquaternion
widetilde textbfq∗= beginbmatrix textbfq∗1 textbfq∗2 endbmatrix
2. Penambahan dan pengurangan Biquaternion
widetilde textbfq pm widetilde textbfp= beginbmatrix textbfq1 pm textbfp1 textbfq2 pm textbfp2 endbmatrix
Penambahan dan pengurangan biquaternions bersifat komutatif (istilah dapat dipertukarkan).
3. Perkalian bilangan real dengan biquaternion
a widetilde textbfq= widetilde textbfqa= beginbmatrixa textbfq1a textbfq2 endbmatrix
4. Multiplikasi Biquaternion
widetilde textbfq otimes widetilde textbfp= beginbmatrix textbfq1 otimes textbfp1 textbfq1 otimes textbfp2+ textbfq2 otimes textbfp1 endbmatrix
Perkalian biquaternion adalah non-komutatif (dengan perubahan urutan faktor, hasil dari perkalian biquaternion berbeda).
Operasi ini adalah salah satu yang utama ketika bekerja dengan biquaternions dan membawa makna fisik, yaitu, hasil dari perkalian biquaternion adalah operasi penambahan rotasi dan gerakan linear dari dua biquaternions.5. Membalik biquaternion
widetilde textbfq−1= frac widetilde textbfq∗ | widetilde textbfq |
Penentuan biquaternion melalui sudut orientasi dan vektor posisi
Pertama, kita mendefinisikan sistem koordinat di mana kita akan mempertimbangkan orientasi dan posisi objek di ruang angkasa. Ini harus dilakukan untuk menentukan bagian nyata dari biquaternion (orientasi angka empat), urutan rotasi yang mempengaruhi angka empat yang dihasilkan dari sudut orientasi. Di sini kita akan dipandu oleh sudut-sudut pesawat - yaw
psi melenggang
vartheta dan berguling
gamma .
Tentukan sistem koordinat dasar. Bayangkan Anda berdiri di permukaan Bumi dan melihat ke arah Utara.
Titik
O o - asal dari sistem koordinat, yang terletak di titik asal objek.
Sumbu
O o Yg - diarahkan secara vertikal ke atas, dan berlawanan dengan arah vektor gravitasi.
Sumbu
O oXg - diarahkan ke Utara, di sepanjang garis singgung meridian lokal.
Axis
O o Zg - melengkapi sistem ke kanan dan diarahkan ke kanan, ke arah Timur.
Sistem koordinat kedua terhubung. Bayangkan, misalnya, pesawat terbang atau benda lain.
Titik
O - asal sistem koordinat, sebagai aturan, terletak di titik pusat massa objek.
Sumbu
OY - diarahkan secara vertikal ke atas, dan tegak lurus terhadap bidang horizontal objek.
Axis
OX - diarahkan maju ke titik depan objek.
Sumbu
OZ - melengkapi sistem ke kanan.
Posisi objek dalam ruang ditentukan oleh radius vektor asal (titik
O ) dari sistem koordinat terkait relatif terhadap sistem koordinat basis tetap. Orientasi sistem koordinat terkait relatif terhadap basis ditentukan oleh tiga putaran berturut-turut:
sudut menganga
psi - Rotasi di sekitar sumbu
OY ,
sudut pitch
vartheta - Rotasi di sekitar sumbu
OZ ,
sudut gulungan
gamma - Rotasi di sekitar sumbu
OX .
Untuk penentuan awal biquaternion, Anda harus menentukan bagian nyata dan ganda biquaternion. Orientasi dan posisi objek diatur relatif ke sistem koordinat basis tertentu menggunakan sudut orientasi
psi, vartheta, gamma dan vektor posisi pusat massa
r=(rx,ry,rz)T .
Bagian yang sebenarnya
textbfq1 dapat diatur menggunakan rumus:
\ textbf {q} _1 = \ begin {bmatrix} \ cos \ frac {\ psi} {2} \ cos \ frac {\ vartheta} {2} \ cos \ frac {\ gamma} {2} & - & & \ sin \ frac {\ psi} {2} \ sin \ frac {\ vartheta} {2} \ sin \ frac {\ gamma} {2} \\ \ cos \ frac {\ psi} {2} \ cos \ frac { \ vartheta} {2} \ sin \ frac {\ gamma} {2} & + & \ sin \ frac {\ psi} {2} \ sin \ frac {\ vartheta} {2} \ cos \ frac {\ gamma} {2} \\ \ cos \ frac {\ psi} {2} \ sin \ frac {\ vartheta} {2} \ sin \ frac {\ gamma} {2} & + & \ & sin \ frac {\ psi} { 2} \ cos \ frac {\ vartheta} {2} \ cos \ frac {\ gamma} {2} \\ \ cos \ frac {\ psi} {2} \ sin \ frac {\ vartheta} {2} \ cos \ frac {\ gamma} {2} & - & \ sin \ frac {\ psi} {2} \ cos \ frac {\ vartheta} {2} \ sin \ frac {\ gamma} {2} \ end {bmatrix}
Harap perhatikan bahwa jika Anda memiliki urutan rotasi yang berbeda, maka ekspresi juga akan berbeda.
Bagian ganda
textbfq2 didefinisikan oleh ungkapan:
textbfq2= frac12 textbfr otimes textbfq1
Perhitungan sudut orientasi dan vektor posisi dari biquaternion. Transformasi terbalik
Sudut orientasi dapat dihitung dari bagian sebenarnya dari biquaternion
textbfq1 :
psi= arctan frac2(q0q2−q1q3)q20+q21−q22−q23
vartheta= arcsin(2(q1q2+q0q3))
gamma= arctan frac2(q0q1−q2q3)q20−q21+q22−q23
Posisi objek ditentukan oleh ekspresi:
textbfr=2 textbfq2 otimes textbfq−11
hasilnya adalah vektor dalam bentuk angka empat
textbfr=(0,rx,ry,rz)TPutar dan pindahkan biquaternion vektor
Salah satu sifat besar biquaternions adalah rotasi dan pergerakan vektor dari satu sistem koordinat ke yang lain. Biarkan
O oX g Yg Zg menjadi sistem koordinat basis tetap, dan
OXYZ menjadi sistem koordinat objek yang terhubung. Kemudian orientasi dan posisi objek relatif terhadap sistem koordinat dasar dapat ditentukan oleh biquaternion
widetilde textbfq . Jika suatu vektor ditentukan
textbfr dalam sistem koordinat yang terhubung, maka Anda bisa mendapatkan vektor
textbfr0 dalam sistem koordinat dasar menggunakan rumus:
textbfr0= widetilde textbfq otimes textbfr otimes widetilde textbfq−1
dan kembali:
textbfr= widetilde textbfq−1 otimes textbfr0 otimes widetilde textbfq
dimana
textbfr Apakah vektor dalam bentuk biquaternion,
textbfr=(1,0,0,0,0,0,rx,ry,rz)Perpustakaan JavaScript Biquaternion
Semua operasi di atas dengan biquaternions diimplementasikan di perpustakaan-javascript, tergantung pada tugas Anda, itu dapat diimplementasikan dalam bahasa pemrograman lain. Fungsi utama bekerja dengan biquaternions:
| Fungsi | Deskripsi |
|---|
DualQuaternion.dq | Badan Biquaternion sebagai array dari 8 angka |
DualQuaternion(dq0, dq1, dq2, dq3, dq4, dq5, dq6, dq7) | Konstruktor yang mendefinisikan biquaternion dengan menentukan semua delapan angka |
DualQuaternion.fromEulerVector(psi, theta, gamma, v) | Dapatkan biquaternion dengan mengatur orientasi objek dengan sudut Euler dan vektor posisi objek |
DualQuaternion.getEulerVector() | Dapatkan sudut Euler dan vektor posisi dari biquaternion |
DualQuaternion.getVector() | Dapatkan vektor posisi dari biquaternion |
DualQuaternion.getReal() | Dapatkan bagian nyata dari biquaternion (menentukan orientasi objek dalam ruang) |
DualQuaternion.getDual() | Dapatkan bagian ganda dari biquaternion (menentukan posisi objek dalam ruang) |
DualQuaternion.norm() | Dapatkan norma biquaternion sebagai angka ganda |
DualQuaternion.mod() | Dapatkan modul biquaternion sebagai nomor ganda |
DualQuaternion.conjugate() | Dapatkan biquaternion terkonjugasi |
DualQuaternion.inverse() | Dapatkan Biquaternion Terbalik |
DualQuaternion.mul(DQ2) | Multiplikasi Biquaternion |
DualQuaternion.toString() | Konversikan biquaternion menjadi string, misalnya, untuk output ke konsol debug |
Contoh bekerja dengan biquaternions
Untuk pemahaman yang lebih baik tentang dasar-dasar penggunaan biquaternions sebagai contoh, pertimbangkan permainan kecil. Area persegi panjang diatur - peta. Sebuah kapal melayang di peta dengan pistol putar yang terpasang di peta. Di sini perlu untuk memperhitungkan bahwa untuk kapal, sistem koordinat dasar adalah sistem koordinat peta, dan untuk pistol, sistem koordinat dasar adalah kapal. Semua objek digambar dalam sistem koordinat peta dan di sini akan menarik untuk melihat bagaimana Anda dapat beralih dari sistem koordinat pistol ke sistem koordinat peta menggunakan properti multiplikasi biquaternion. Pergerakan kapal dikendalikan oleh tombol W, A, S, D. Arah pistol diatur oleh kursor mouse.

Kapal dan senapan dijelaskan oleh dua kelas:
Ship dan
Gun . Dalam konstruktor kelas kapal, bentuknya dalam bentuk titik biquaternion, orientasi awal dan posisi pada peta dalam bentuk
this.dq_pos .
Peningkatan Biquaternion juga diberikan untuk kontrol kapal. Saat bergerak bolak-balik (tombol W, S), hanya bagian ganda dari biquaternion yang akan berubah, dan ketika mengontrol kanan-kiri (tombol A, D), bagian nyata dan ganda dari biquaternion akan berubah, yang menentukan sudut rotasi.
function Ship(ctx, v) { this.ctx = ctx; this.dq_pos = new DualQuaternion.fromEulerVector(0*Math.PI/180, 0, 0, v);
Di kelas itu sendiri, hanya ada satu fungsi untuk merender kapal
Ship.draw() . Perhatikan penerapan operasi biquaternion untuk mengalikan setiap titik kapal dengan biquaternion dari posisi saat ini dan orientasi kapal.
Ship.prototype = { 'ctx': 0, 'dq_pos': new DualQuaternion.fromEulerVector(0, 0, 0, 0, 0, 0), 'draw': function() {
Dalam konstruktor kelas senjata, bentuknya dalam bentuk titik biquaternion ditentukan. Pistol akan ditampilkan sebagai garis. Orientasi awal dan posisi pada kapal diatur oleh
this.dq_pos . Juga, pengikatan ke kapal tempat ia diinstal juga diatur. Pistol di kapal hanya bisa berputar, jadi penambahan biquaternion saat mengendalikan pistol hanya akan mengubah bagian sebenarnya dari biquaternion, yang menetapkan sudut rotasi. Dalam contoh ini, implement dipandu oleh kursor mouse, sehingga rotasi pistol akan terjadi secara instan.
function Gun(ctx, ship, v) { this.ctx = ctx; this.ship = ship;
Di kelas senjata, hanya satu fungsi renderingnya
Ship.draw() juga diimplementasikan. Pistol ditampilkan sebagai garis, yang ditetapkan oleh dua titik
this.dq_backward dan
this.dq_forward . Untuk menentukan koordinat titik-titik pistol, operasi multiplikasi biquaternion digunakan.
Gun.prototype = { 'ctx': 0, 'ship': 0, 'dq_pos': new DualQuaternion.fromEulerVector(0, 0, 0, [0, 0, 0]), 'draw': function() {
Pemrosesan kontrol kapal dan senjata diterapkan melalui berbagai peristiwa. Empat variabel
leftPressed, upPressed, rightPressed, downPressed , yang diproses dalam loop program utama, bertanggung jawab untuk menekan dan melepaskan kunci kontrol kapal.
leftPressed = false; rightPressed = false; upPressed = false; downPressed = false; dq_mouse_pos = new DualQuaternion.fromEulerVector(0, 0, 0, [0, 0, 0]); document.addEventListener("keydown", keyDownHandler, false); document.addEventListener("keyup", keyUpHandler, false); document.addEventListener("mousemove", mouseMoveHandler, false);
Salah satu fungsi yang paling menarik, dari sudut pandang menggunakan operasi biquaternion, adalah untuk mengontrol pistol kapal ke arah penunjuk mouse. Pertama, koordinat penunjuk tetikus ditentukan dalam
dq_mouse_pos . Kemudian, biquaternion dari posisi mouse relatif terhadap kapal dihitung menggunakan perkalian biquaternion. Biquaternion kapal diambil dari
dq_mouse_pos_about_ship = ship_1.dq_pos.inverse().mul(dq_mouse_pos); mouse
dq_mouse_pos_about_ship = ship_1.dq_pos.inverse().mul(dq_mouse_pos);(Catatan: operasi multiplikasi biquaternion berurutan dibaca dari kanan ke kiri). Dan akhirnya, sudut antara vektor alat dan mouse ditentukan. Gun titik awal
gun_1.dq_backward diberikan nilai yang diterima.
function mouseMoveHandler(e) { var relativeX = e.clientX - canvas.offsetLeft; var relativeY = e.clientY - canvas.offsetTop;
Di bagian utama program, objek kapal dan senjata
ship_1 dan
gun_1 , informasi debugging ditampilkan, dan pemrosesan kontrol kapal dilakukan.
var canvas = document.getElementById("myCanvas"); var ctx = canvas.getContext("2d"); ship_1 = new Ship(ctx, [100, 0, 100]); gun_1 = new Gun(ctx, ship_1, [0, 0, 0]); function draw() { ctx.clearRect(0, 0, canvas.width, canvas.height); ship_1.draw(); gun_1.draw();
Tautan ke arsip berisi kode lengkap perpustakaan untuk bekerja dengan angka empat dan dua kutip, skrip program itu sendiri, dan file index.html, yang dapat dibuka secara lokal di browser untuk menjalankan contoh di atas.
Contoh bekerja dengan biquaternionsKesimpulan
Anda mungkin memiliki pertanyaan: mengapa menggunakan alat matematika yang begitu rumit ketika Anda bisa bertahan dengan alat standar untuk memindahkan dan memutar objek? Salah satu keuntungan utama adalah bahwa bentuk penulisan biquaternion lebih efisien secara komputasi, karena semua operasi dengan biquaternions setelah ekspresi diperluas adalah linier. Video ini,
Geometric Skinning dengan Approximate Dual Quaternion Blending, menunjukkan betapa jauh lebih efisien perhitungan biquaternion daripada metode lain.
Saya terutama mengambil informasi tentang penggunaan biquaternion dari sumber-sumber bahasa Inggris.
Dari literatur domestik, saya dapat menyarankan dua buku:
- Chelnokov Yuri Nikolaevich. Quaternion dan model biquaternion dan metode mekanika padat dan aplikasinya. Geometri dan kinematika gerak. - karya teoritis monumental.
- Gordeev Vadim Nikolaevich. Kuarter dan biquaternion dengan aplikasi dalam geometri dan mekanika. - Ini ditulis dalam bahasa yang lebih dimengerti dan menunjukkan aplikasi dalam tugas membentuk struktur spasial melengkung.