Anda mungkin tidak tahu betapa saya menghargai
Habr . Ini bukan hanya situs dengan informasi yang relevan. Ini adalah komunitas jejaring orang. Dalam posting ini, sebuah cerita pendek tentang bagaimana
Habr memenuhi impian . Bagaimana dalam 6 bulan Anda dapat membuat MVP dari sebuah ide, mencari investor dan membuat sesuatu yang baru. Posting yang Anda tidak perlu takut menerapkan ide-ide, jangan biarkan mereka mengumpulkan debu sampai waktu yang lebih baik. Di bawah potongan, ada banyak foto dari lapangan, dari perjalanan ke Republik Dominika, metamorfosis robot karena habranetorking.
Mungkin kisah kami memotivasi Anda untuk mewujudkan ide-ide Anda yang telah lama menetas, tetapi tidak berani berubah menjadi kehidupan. Untuk melakukan ini, artikel tersebut
menghubungi dana investasi di Federasi Rusia .
Dalam golf ada driving range, ini adalah lapangan latihan untuk berlatih pukulan panjang dan menengah. Hingga 20.000 gol dapat muncul setiap hari. Bola-bola ini perlu dikumpulkan entah bagaimana. Biasanya, peralatan khusus yang melekat pada mobil digunakan untuk koleksi. Ini adalah biaya personel, perawatan peralatan, kerusakan bola oleh peralatan, kerusakan lapangan.
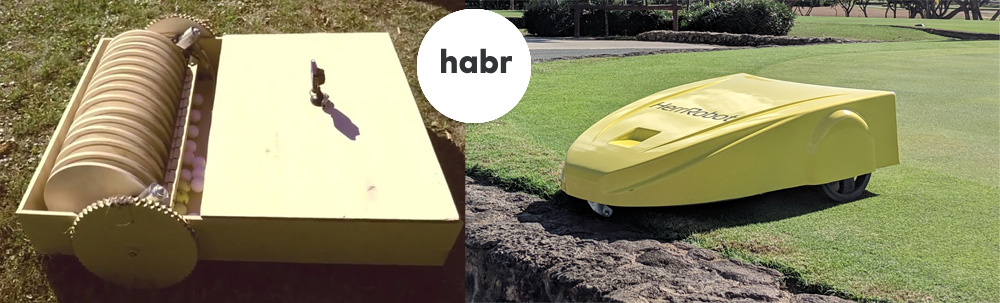
Pada musim panas 2018, teman saya Michael Vikrent, seorang guru golf di Jerman, berbicara tentang kepedihan pengelola klub golf, dan saya menemukan solusi dalam bentuk robot. Saya membuat prototipe pertama dari kayu lapis dan menulis
artikel tentang itu
di habr.com dan mendapat tanggapan luas. Sekarang, kami sudah 4 orang di tim, profesional dengan pengalaman di perusahaan global.
Pesan utama dari posting ini adalah bahwa Anda mungkin tidak memiliki segalanya yang sempurna, penting untuk bertindak. Jika saya akan menyimpan ide saya, melindungi dan menghargai, tidak ada yang datang darinya. Saya membuat pilihan pertama (sangat jauh dari ideal) dan membicarakannya. Ini membantu menemukan orang yang berpikiran sama dengan siapa, saya harap, kita akan tetap berteman baik. Di bawah ini adalah foto gedung tim Moskow kami!

Lebih lanjut tentang kasus ini, mekanik, papan kontrol dan perangkat lunak, saya ingin menunjukkan apa yang ada di awal dan bagaimana tampilannya sekarang. Kemajuan terutama terlihat karena efek basa rendah.
Perumahan
Versi pertama dari korps itu mengerikan dan berteriak bahwa kami membutuhkan seorang pria untuk menyelesaikan masalah ini. Habr membantu menemukan orang seperti itu. Sekarang case sedang dirancang oleh
NikitaKhvoryk .
Opsi pertama Opsi fiberglass untuk evaluasi dimensi
Opsi fiberglass untuk evaluasi dimensi Vakum membentuk
Vakum membentuk
Versi saat ini adalah dengan lukisan fiberglass dan penguatan.

Kemajuan terlihat dengan mata telanjang, dan ini semua adalah hasil dari jaringan.
Corus bawah
Untuk membuat struktur lebih mudah dibuat, bagian bawah tubuh terbuat dari bahan komposit dan digiling. Dalam setiap iterasi, kami menambahkan bagian dan lubang baru ke tubuh, yang sebelumnya dimodifikasi dengan tangan.

Mekaniknya
Semuanya cocok untuk menguji ide, bahkan mesin non-nama dan roda gigi yang dicetak.

Tentu saja, semua ini harus diganti untuk pengembangan lebih lanjut, bahkan perubahan mesin dan pencetakan roda gigi chevron tidak menghemat. Opsi drive ini belum final, sekarang kami sedang menunggu timing belt dan katrol untuk memudahkan desain.

Biaya
Pertama ada kata, lalu papan tempat memotong roti. Seperti apa jalinan kawat itu? Itu benar, buaian untuk kucing.
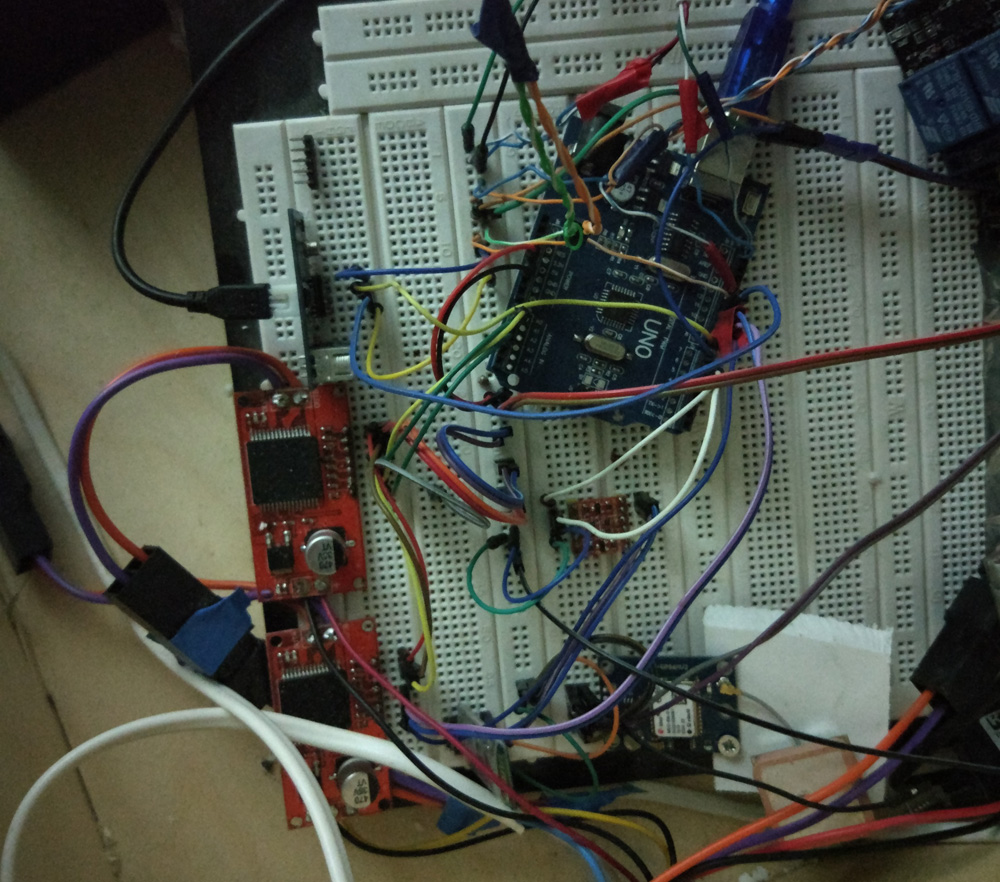
Ini adalah apa yang tampak seperti papan tempat memotong roti kompak pertama.

Kemudian pengguna
SkyserR turun ke
bisnis . Dia merancang dan memasang papan koneksi modul untuk versi raspberry pi.
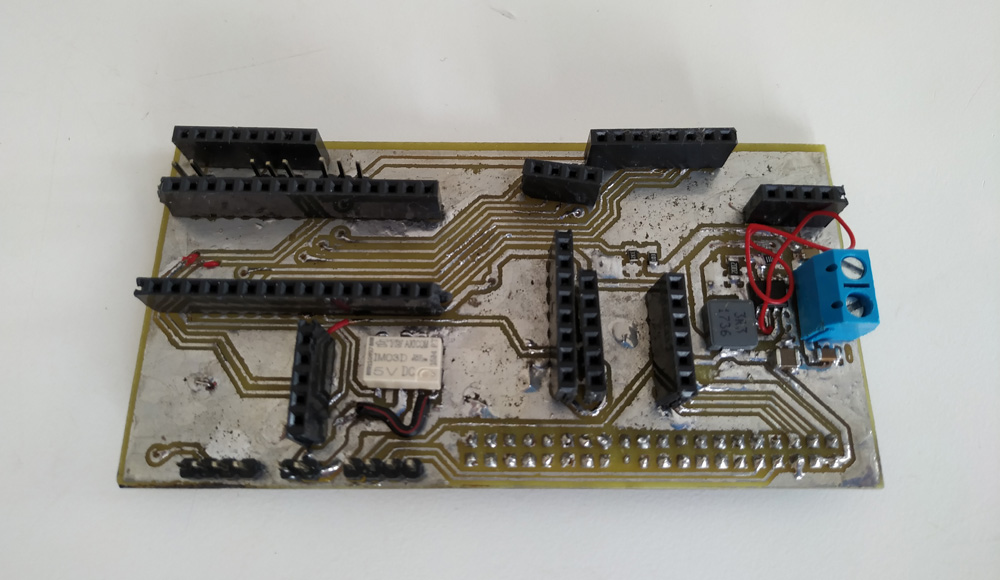 Versi board dari Resonite
Versi board dari Resonite
Versi dengan Ardupilot sedang dikembangkan oleh Vladimir Goncharov
Shadow_ru . Anda dapat membacanya di
sini .
Kami berterima kasih kepada
Process0169 ,
Trif ,
tersuren ,
vasimv ,
vovaekb90 ,
r00mka , Vyacheslav Soldatov, Levon Zakaryan, Sergey Pomazkin, Vladi Kuban, Karen Musaelyan, Alexei Platonov atas bantuan dan sarannya. Jika Anda ingin membantu - silakan menulis kepada saya di LAN atau
VK ,
FB .
Perangkat lunak
Awalnya, semua perangkat lunak itu ditulis sendiri. Skrip Python dan sketsa Arduino. Namun ketika lelah bersepeda beralih ke Ardupilot dan ROS.
Kami memiliki MVP dan sekarang kami secara bersamaan mengembangkan bagian perangkat keras dan perangkat lunak. Kami menggunakan solusi opensource dan menulis perangkat lunak kami sendiri. Kami memiliki mitra mitra di Rusia dan Cina yang memasok kami dengan komponen.
Konversi dari hobi untuk bereksperimen dalam suatu produk
Pada bulan Oktober, menjadi jelas bahwa proyek ini dapat diubah menjadi proyek komersial. Kami mengajukan aplikasi ke Accelerator dari Sberbank dan 500 Startups, tetapi menerima jawaban tentang perbedaan untuk fokus investasi. Secara umum, mereka membutuhkan proyek untuk tahap Preseed, yang kami tidak cocok pada waktu itu. Kemudian aplikasi untuk "Grant Competition EXPO 2020 Dubai", kami bahkan tidak mendapat tanggapan dari mereka. Kami telah mengajukan aplikasi ke Yayasan untuk Promosi Pengembangan Usaha Kecil (Dana Bortnik) untuk program Start-1, kami menunggu jawaban.
Pidato di acara "Reconnaissance Fight"

Kami mengambil bagian dalam sesi pitch, berbicara tentang proyek kami. Kontak diterima oleh 3 dana investasi dan dua investor independen. Partisipasi gratis, acara sedang berlangsung. Saya sangat merekomendasikannya, ini memungkinkan Anda untuk mencari investor, menyiapkan presentasi Anda, menemukan kelemahan dalam proyek. Itu adalah pertemuan dengan salah satu dana dari acara yang memungkinkan untuk menerima tawaran pertama.
Setelah acara tersebut, kami mengirim presentasi proyek ke dana Rusia. Ini memungkinkan kami untuk mendapatkan undangan ke pertemuan kedua dan memulai negosiasi.
Kontak dana di Federasi Rusia Pilihan yang bagus adalah menghubungi investor yang memiliki proyek serupa dalam portofolionya atau berinvestasi dalam topik ini. Saya menggunakan situs
rb.ru/company/?niche=119 dan memilih startup robotika. Dia menganalisis siapa yang berinvestasi di dalamnya dan mengirim mereka presentasi. Metode ini cocok untuk sentuhan pertama. Bukan fakta bahwa seseorang menanggapi email semacam itu dengan serius, tetapi secara signifikan meningkatkan basis kontak. Cara menggunakannya terserah Anda.
Dana di AS yang kami siapkan aplikasi.- Y combinator
- 500 mulai
- Pasang dan mainkan
- Techstars
- Seedcamp
- SOSV
- StartUpBootCamp
- Starta
Jika Anda memiliki pengalaman dalam mempresentasikan proyek di AS dan ingin membantu kami dalam hal ini,
tulis kepada saya di jejaring sosial.Perjalanan ke Republik Dominika pada bulan Februari 2019
"Esto es un robot que collecta las bolas de golf" - Saya berkata, karena saya tidak tahu bagaimana bahasa Spanyol akan menjadi "Tidak, ini bukan domba elektro", saya pikir itu akan terdengar kurang lebih sama untuk senior dari Haiti yang cerah dan persaudaraan.

Habroyzer
tersuren mengundang kami ke Republik Dominika. Jadi kami mendapat kesempatan untuk menguji robot kami di musim dingin dan tidak menunggu sampai Mei untuk menyelesaikan
algoritma untuk membangun lintasan dengan GPS. Pada saat yang sama, tes itu sendiri berlangsung di salah satu klub golf terbaik di dunia. Kami merekam video robot yang bekerja di klub golf, yang sangat membantu dalam berkomunikasi dengan investor dan menunjukkan kemampuan robot.
vasimv tinggal dan bekerja di Republik Dominika dengan
mesin pemotong rumput robot . Mengingat pos permanen di puncak emigrasi, jika Anda terlibat dalam ROS, robotika atau elektronik, sambil berpikir tentang
memindahkan tempat tinggal Anda untuk waktu yang lama, menulis ke
tersuren .

Terbang dengan robot adalah keseluruhan cerita. Selain robot 1100 * 800 * 300, itu juga perlu untuk entah bagaimana mengangkut suku cadang, barang-barang pribadi. Secara umum, saya mengambil laptop dan baterai di ransel. Dan barang-barang pribadi, hadiah dari Rusia, mesin cadangan, roda, kabel, dll. ditempatkan tepat di robot, di kompartemen bola. Anda harus melihat wajah terkejut bandara dan bea cukai. Robot itu dibawa ke sana beberapa kali di pemindai. Berakhir dalam kedua kasus dengan pertanyaan:
Apakah itu apa? Mengingat tulisan besar HERROBOT di papan tulis, saya merasa bahwa tidak akan ada pertanyaan. Jadi, sebenarnya, jelas!
Foto-foto dari Republik Dominika Bukan tanpa Epic-fail. Kami bergegas memesan papan dengan cara yang resonan, jadi salah satu kontak ternyata menjadi bingung. Dia disolder dengan ingus. Karena kelembaban, pengemudi di kabel bekerja melalui waktu. Mungkin tidak ada pertanyaan tentang pengujian algoritma dengan masalah level rendah. "Soma gram dan tidak ada drama." Kemudian kami beralih ke versi pengujian pada Beaglebone dan Ardupilot.
Saya, mengatasi panas, dan
Shadow_ru mengatasi dingin dengan perbedaan 7 jam karena zona waktu, memperkenalkan perubahan mendesak pada Ardupilot untuk membuatnya bekerja dalam kondisi baru. ESC, digantikan oleh yang terbakar, seharusnya dibesarkan dari toko online sehari sebelum keberangkatan dari Rusia, tetapi bukan nasib. Kontroler yang ada mengerti PWM, dan beaglebone dengan keras kepala hanya mengeluarkan frekuensi untuk serv. Pada akhirnya, saya harus membuat jembatan dari Arduino. Semuanya dilakukan dengan tergesa-gesa, tetapi tiba-tiba seseorang membutuhkan kode.
Sketsa Jembatan untuk Konversi Frekuensi ke PWM#include <math.h> int ch0,ch1,pwm,pwm2; void setup() { //Declaring LED pin as output pinMode(A1, INPUT); pinMode(A0, INPUT); pinMode(2, OUTPUT); pinMode(3, OUTPUT); pinMode(4, OUTPUT); pinMode(5, OUTPUT); pinMode(6, OUTPUT); pinMode(7, OUTPUT); Serial.begin(9600); while (!Serial) { ; // wait for serial port to connect. Needed for Leonardo only } } void loop() { ch1 =pulseIn(A1, HIGH); if(ch1<1470){ pwm=(1500-ch1)/2; analogWrite(7, pwm); digitalWrite(6,LOW); digitalWrite(5,HIGH); }else if(ch1>1530){ pwm=(ch1-1500)/2; analogWrite(7, pwm); digitalWrite(6,HIGH); digitalWrite(5,LOW); }else{ pwm=0; analogWrite(7, pwm); digitalWrite(6,LOW); digitalWrite(5,LOW); } ch0 =pulseIn(A0, HIGH); if(ch0<1470){ pwm2=(1500-ch0)/2; analogWrite(4, pwm2); digitalWrite(3,LOW); digitalWrite(2,HIGH); }else if(ch0>1530){ pwm2=(ch0-1500)/2; analogWrite(4, pwm2); digitalWrite(3,HIGH); digitalWrite(2,LOW); }else{ pwm2=0; digitalWrite(3,LOW); digitalWrite(2,LOW); } Serial.print("ch0="); Serial.println(ch0); Serial.print("ch1="); Serial.println(ch1); Serial.print("pwm2="); Serial.println(pwm2); for(int i=0; i<255; i++){ delay(5); } }
Video promo setelah perjalanan
Video rendering 3D sebelum perjalanan
Sekarang hanya ada satu pesaing di dunia dan harganya $ 15.000. Di dunia 34.000 klub golf, setiap orang menghabiskan setidaknya $ 1.500 / massa untuk mengumpulkan bola. Ini adalah pasar lebih dari $ 600 juta / tahun. Program minimum kami adalah penjualan dan pemeliharaan 1000 robot berikutnya. Bahkan ketika dijual dengan harga 40% lebih rendah dari pesaing, ini adalah sekitar $ 8 juta dalam pendapatan.
Kami memiliki perjanjian awal dengan klub golf yang tertarik untuk menguji robot di lapangan mereka di Jerman, Australia, Selandia Baru, Swedia dan Republik Dominika. Dan semua ini berkat Habr.
Apakah Anda tahu bagaimana memenuhi impian Anda dan menghidupkan ide-ide Anda? Tenang Tutup saja matamu dan nikmati saat ini. Eckhardt Tolle tidak akan memberi tahu Anda tentang kekuatan saat ini, jika Anda menggulirkan pikiran yang sama dan mereka tidak memberi Anda istirahat. Anda menambahkan detail ke proyek Anda, tetapi jangan mulai melakukannya. Anda lupa sebentar, dan kemudian pemicu seperti apa lagi yang menyebabkan gambar ide untuk proyek impian. Inilah yang menjadi alasan untuk mulai melakukan. Jangan menunggu momen yang sempurna, momen yang sempurna sekarang!

Apakah robot seperti itu diperlukan sama sekali? Golf tidak begitu luas di Rusia sejauh ini, tetapi kami beralih ke pakar industri untuk mengetahui pendapat mereka. Mereka semua sepakat bahwa robot ini diperlukan.


Kami berpaling ke para pemimpin pasar robotika di Rusia untuk mengetahui pendapat mereka tentang robot layanan untuk menyelesaikan tugas rutin. Tidak diragukan lagi ini adalah tren yang sulit untuk diperdebatkan.

Kami akan memperbaiki dan mempromosikan robot kami, karena kami tidak bisa melakukan ini. Untuk mempercepat, kami membutuhkan bantuan dan dukungan Anda!
Paket
Pada awal bulan Maret kami merencanakan lapangan lain. Kenapa, kalau sudah ada penawaran? Saya belum tahu, kita pergi sebagai Siddhartha, jalan menemukan kita. Pada bulan Maret, kita perlu menyelesaikan semua algoritme untuk kerja penuh dan mulai menguji lapangan golf di Federasi Rusia pada bulan April. Pada bulan Juni, partisipasi dalam pameran, publikasi dalam publikasi golf Eropa. Selama musim panas 2019, kita harus membuat 25 robot dan memulai tes di Jerman dan Republik Dominika. Pada musim gugur, mulailah menjual sebagai layanan. Dan pada tahun 2020, memasuki pasar AS.
Pada tahun 2020, lepaskan model mesin pemotong rumput yang bekerja pada algoritme yang sama untuk membangun lintasan untuk menyelesaikan semua masalah dalam rentang mengemudi.
Ini adalah tonggak sederhana, terima kasih atas dukungan Anda.
Posting kami:PS: Robot ini tidak akan kalau bukan karena
Habr .