Industri otomotif saat ini sedang mengalami revolusi dalam mengemudi mandiri. Kendaraan tak berawak dapat memberikan tingkat keselamatan yang lebih tinggi bagi penumpang, karena manajemennya tanpa faktor manusia. Meluasnya penggunaan kendaraan tak berawak di masa depan akan mengurangi jumlah kecelakaan, dan juga menghemat waktu yang dihabiskan orang mengemudi setiap hari.
OSCAR (Open-Source CAR) adalah proyek penelitian kendaraan tanpa awak StarLine open-source, yang menggabungkan pemikiran teknik terbaik Rusia. Kami menyebut platform OSCAR karena kami ingin membuat setiap baris kode mengenai mobil terbuka untuk komunitas.

Platform anatomi
Sebagai pengguna kendaraan, pemilik mobil ingin pergi dari titik A ke titik B dengan aman, nyaman, dan tepat waktu. Cerita pengguna beragam, mulai dari perjalanan ke kantor atau berbelanja dan berakhir dengan bergaul dengan teman atau keluarga tanpa harus terus mengawasi jalan.
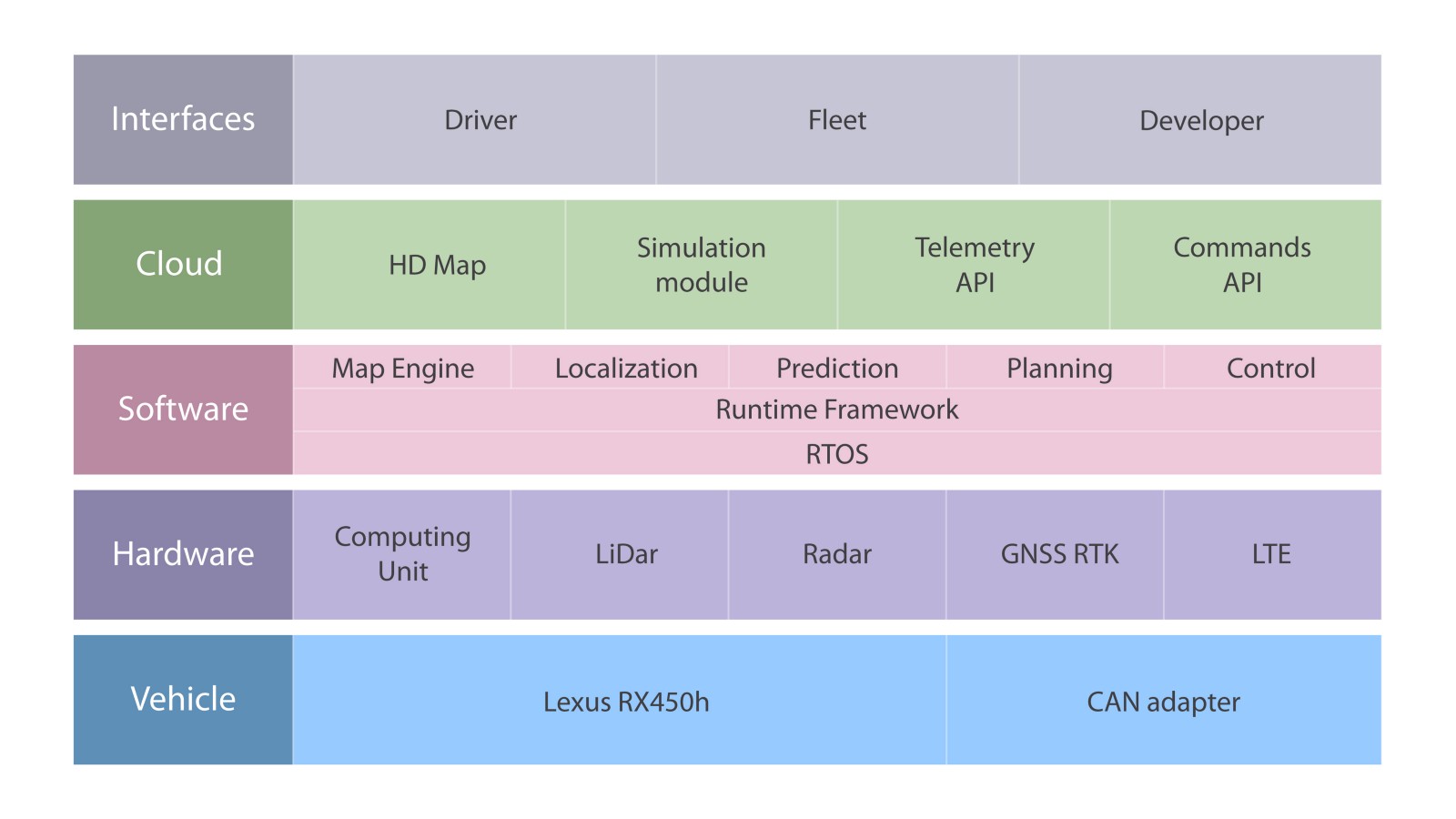
Oleh karena itu, level tertinggi platform adalah aplikasi dan lingkungan pengguna. Kami mengandalkan tiga kelompok pengguna: pengguna individu, komersial, serta pengembang platform. Untuk masing-masing grup hari ini kami merancang antarmuka yang terpisah. Tingkat kedua adalah bagian server, yang mencakup peta resolusi tinggi, modul simulasi, serta API yang melayani mobil. Level perangkat lunak adalah pembuatan program yang akan dibangun ke dalam mobil. Dan dua level bawah platform bekerja pada mobil itu sendiri, yang melibatkan memeriksa antarmuka digital dari mesin itu sendiri dan memasang peralatan.
Mobil
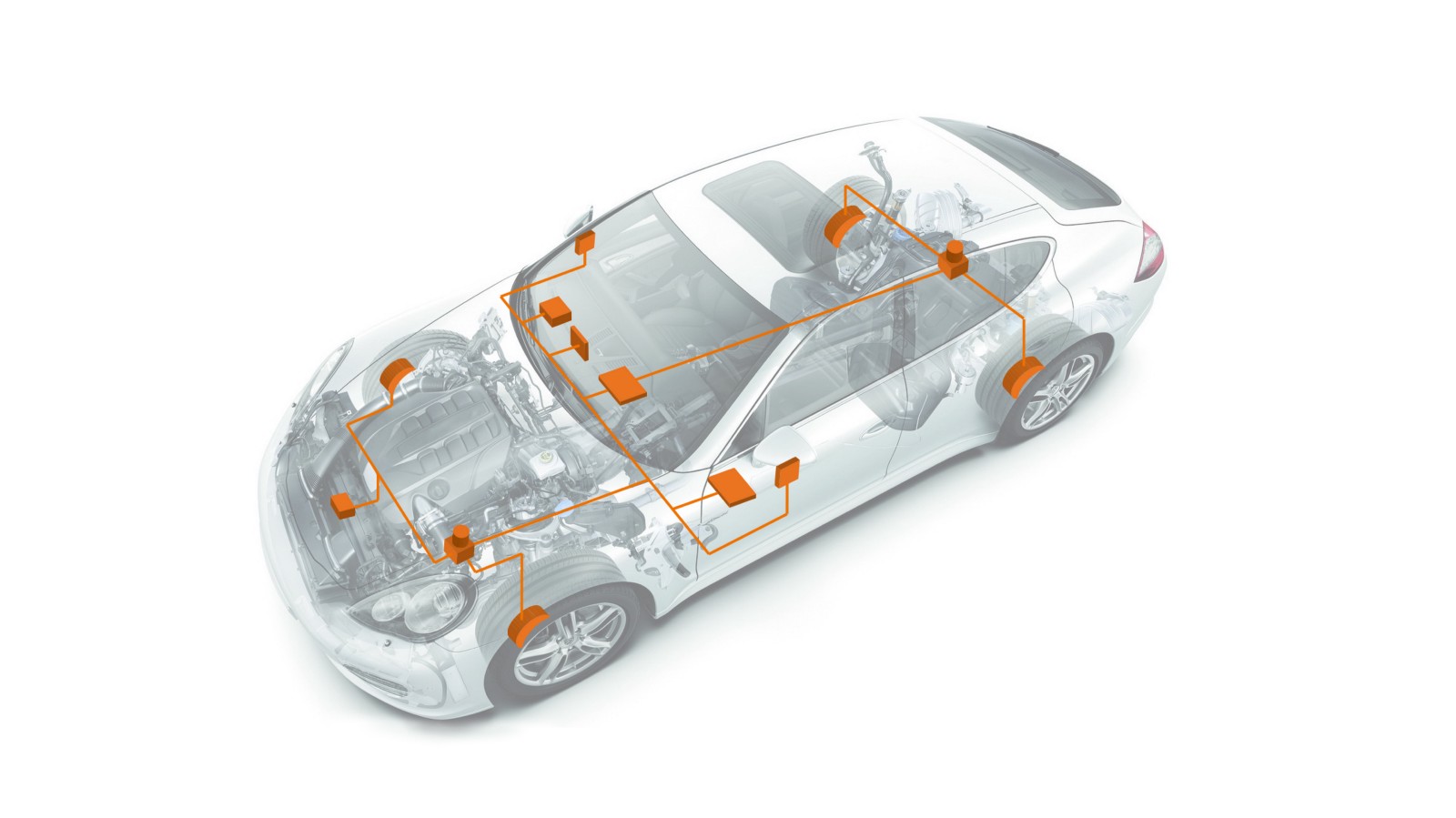
Mobil modern dapat memiliki hingga 70 unit kontrol elektronik untuk berbagai subsistem. Biasanya prosesor yang paling kuat adalah unit kontrol mesin, sementara yang lain digunakan untuk mengontrol transmisi, airbag, sistem pengereman anti-lock, sistem audio, penyesuaian cermin ... Beberapa dari mereka membentuk subsistem independen, sementara yang lain bertukar informasi dan perintah di antara mereka sendiri.
Untuk memastikan komunikasi antara perangkat kendaraan, standar CAN dikembangkan.
CAN-bus adalah standar jaringan industri, serta sistem komunikasi digital dan kontrol perangkat listrik mobil. Perangkat mobil terhubung ke bus CAN secara paralel untuk mengirim dan menerima data. Memiliki akses ke antarmuka digital ini, Anda dapat, misalnya, menghidupkan mesin, membuka pintu, melipat cermin mobil menggunakan perintah kontrol.
Untuk mengontrol akselerasi dan kemudi mobil, kami perlu mengakses bus CAN dan memahami jenis paket yang sesuai. NPO StarLine adalah produsen perangkat elektronik, jadi kami telah mengembangkan adaptor bus CAN kami sendiri.

Saat ini, kita bisa menyetir, mengerem, dan berakselerasi menggunakan laptop.

Peralatan
Area kerja yang penting adalah memperlengkapi kendaraan dengan sensor dan sensor. Ada sejumlah pendekatan untuk melengkapi kendaraan tanpa awak. Sebagai contoh, beberapa perusahaan menggunakan lidar mahal, sementara yang lain menolaknya, membatasi diri pada pembacaan perangkat lain.

Sekarang mobil StarLine tanpa awak dilengkapi dengan beberapa kamera mono dan binokuler, radar, kapten, serta navigasi satelit.
Tugas penerima GPS adalah menentukan lokasinya di ruang angkasa, serta waktu yang tepat. Penerima GPS sipil memiliki akurasi yang tidak memadai untuk menentukan posisi kendaraan tak berawak; kesalahannya bisa mencapai beberapa meter. Ini terjadi baik karena refleksi ulang sinyal dari dinding bangunan di lingkungan perkotaan, dan karena faktor alam yang diprediksi buruk, misalnya, perubahan kecepatan sinyal dari satelit di ionosfer bumi.
Untuk memposisikan kendaraan tak berawak, kesalahan penerima GPS sipil terlalu besar, dan oleh karena itu, dalam pengembangan kami, kami menggunakan navigasi satelit ultra-presisi. Untuk melakukan ini, penerima GNSS RTK dipasang pada mobil, yang menggunakan teknik pemosisian yang lebih maju dan, dengan demikian, mencapai akurasi pemosisian sentimeter hanya melalui navigasi satelit.
Tetapi saat mengemudi, mobil mungkin berakhir di terowongan atau di bawah jembatan, di mana sinyal dari satelit terlalu lemah atau tidak ada sama sekali. Karena itu, keakuratan penerima GNSS-RTK akan turun, atau penentuan posisi tidak akan mungkin sama sekali. Dalam kasus ini, mobil akan memperhalus posisinya menggunakan pembacaan odometer dan akselerometer. Algoritma yang menggabungkan data dari beberapa sumber berbeda untuk mengurangi ketidakpastian disebut algoritma sensor fusion.
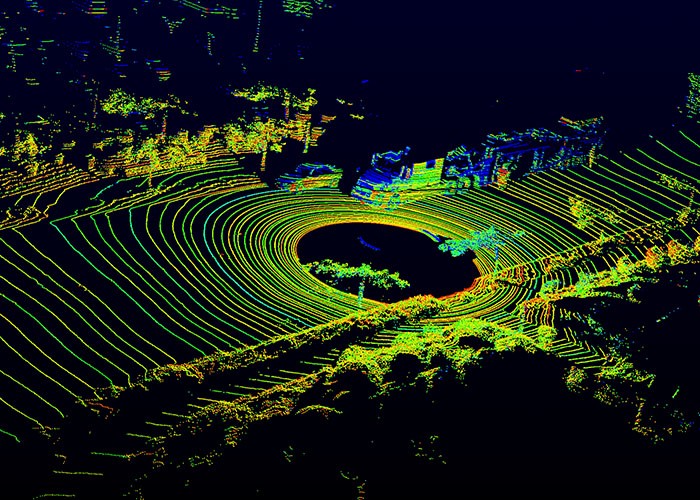
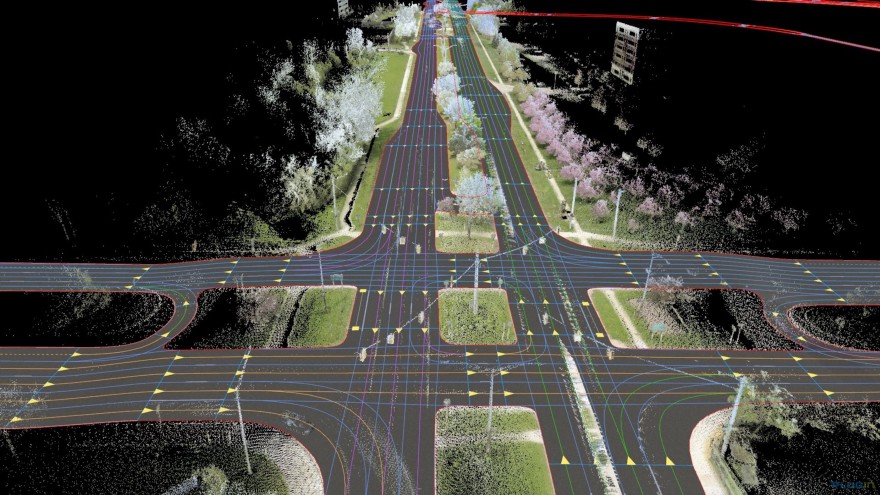
Selain tugas melokalisasi kendaraan tak berawak, Anda juga perlu memiliki gagasan tentang hambatan dinamis yang tidak ada di peta, misalnya mobil yang bergerak di dekatnya atau orang yang melintasi jalan. Untuk keperluan ini, kendaraan tak berawak menggunakan radar dan data lidar. Radar menggunakan gelombang radio untuk mendeteksi hambatan, dan juga, berkat efek Doppler, memungkinkan Anda menghitung kecepatan radialnya. Lidar adalah pencari jangkauan optik aktif yang secara konstan memindai ruang di sekitarnya dan membentuk peta tiga dimensi, yang disebut titik awan.
Setiap perangkat yang digunakan dalam kendaraan tak berawak (dari kamera ke unit RTK GNSS) harus dikonfigurasi sebelum dapat diinstal.
Perangkat lunak
Pada skala terbesar, perangkat lunak drone terdiri dari beberapa modul, termasuk: pengenalan, perencanaan, lokalisasi dan kontrol.
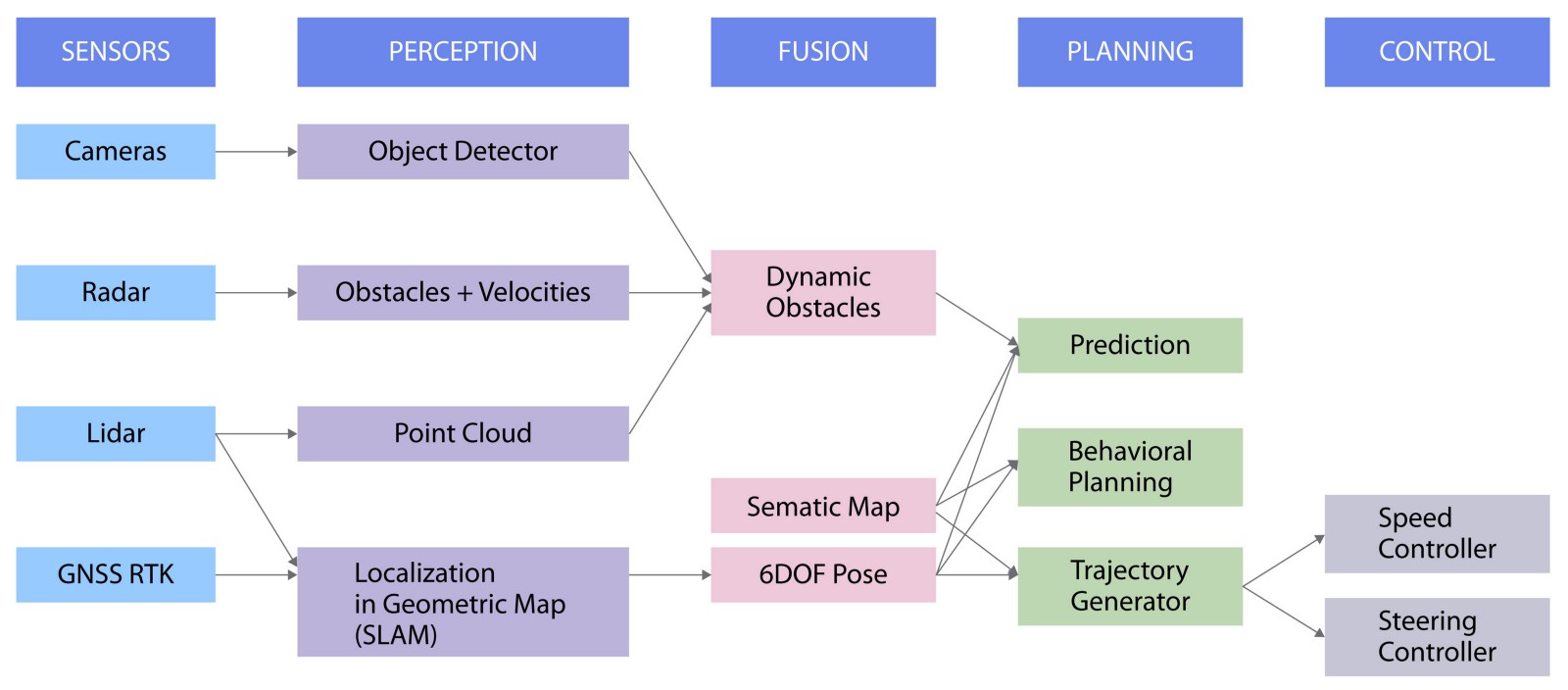
Data dari kamera digunakan untuk mengenali dan mendeteksi objek, radar menerima koordinat dan kecepatan objek di sekitarnya, lidar menyediakan algoritma dengan titik awan, dan modul GNSS RTK menggunakan data satelit untuk melokalisasi mobil.
Kemudian data dari tiga sumber pertama digabungkan untuk mendapatkan informasi tentang hambatan di dekat mobil.
Pada saat yang sama, pembacaan satelit dan lidar digunakan untuk menyelesaikan masalah SLAM, yang berarti lokalisasi dan pemetaan simultan medan. Ini adalah pendekatan untuk membuat peta lingkungan yang tidak dikenal dengan melacak lokasi objek di dalamnya. Informasi ini digunakan untuk menghitung 6 koordinat mobil, yang mencakup tiga koordinat spasial dan kecepatan tiga dimensi.
Langkah selanjutnya adalah merencanakan lintasan lokal kendaraan. Langkah terakhir adalah modul kontrol, yang digunakan untuk benar-benar menjalankan lintasan yang dibangun selama konstruksi lintasan.
Saat ini, kami terlibat dalam pengaturan dan pemasangan peralatan dan juga sedang mengerjakan modul kontrol mobil.
Cloud
Bagian server terdiri dari empat blok:
- Kartu HD
- API Telemetri
- API Perintah
- modul simulasi
Pertama, kita membutuhkan penyimpanan untuk peta agar dapat menemukan mobil dengan benar, serta layanan telemetri untuk analisis data. Ini adalah diagram arsitektur server awal kami, yang mencakup dua blok. Nanti kita akan mengembangkannya menggunakan perintah API untuk dapat mengirim perintah kontrol ke mobil dari server. Kami juga akan menambahkan modul simulasi.
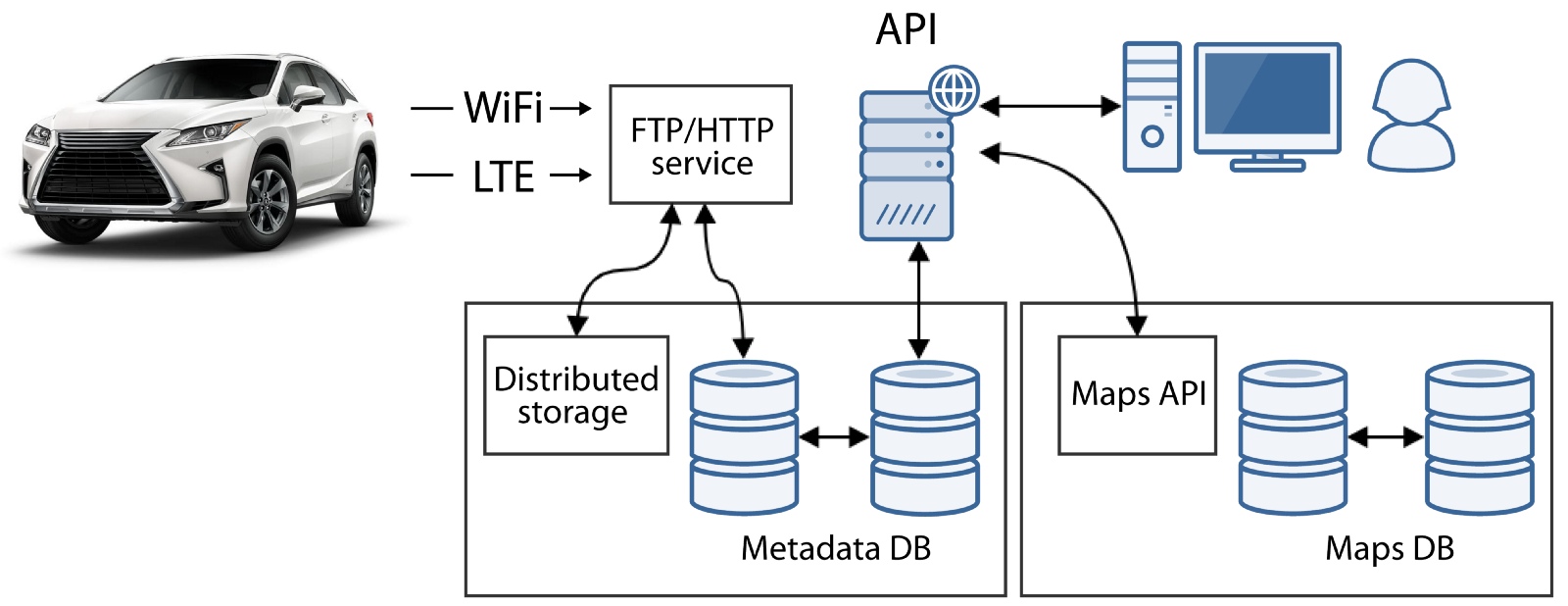
Peta HD adalah peta yang menawarkan gambaran lengkap tentang dunia nyata yang akurat hingga sentimeter, termasuk semua yang terkait dengan infrastruktur jalan, misalnya, informasi tentang jalur, rambu, dan posisi lampu lalu lintas. Peta juga dapat berisi data LIDAR untuk memungkinkan drone melokalisasikannya.
Diperlukan simulator untuk menghasilkan situasi lalu lintas untuk debugging dan pengujian. Dengan mensimulasikan situasi lalu lintas, kami dapat meningkatkan kekokohan algoritma kami dengan melakukan pengujian unit pada beberapa mil skenario yang dapat disesuaikan dan kondisi langka, untuk sebagian kecil dari waktu dan biaya yang akan diperlukan untuk menguji di jalan nyata.

Peta jalan
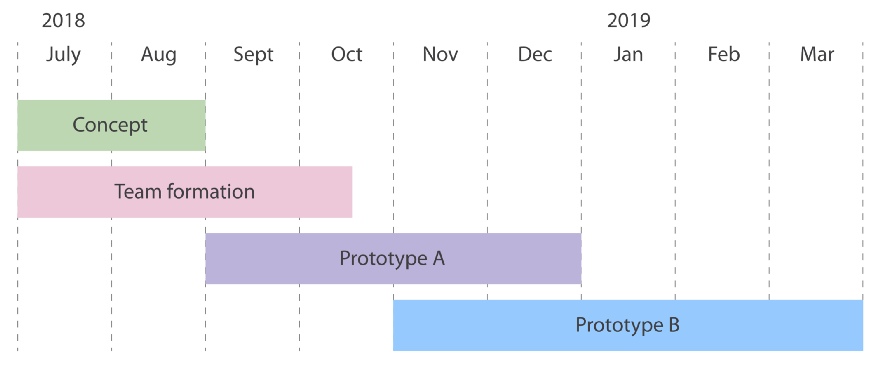
Pada bulan Juli, kami mulai dengan mengembangkan konsep, menciptakan tim, dan memulai jalur menuju prototipe A. Prototipe A adalah mobil yang dapat bergerak di sepanjang titik arah, tetapi membutuhkan intervensi operator untuk menghindari rintangan. Prototipe B, pengembangan yang kami rencanakan selesai pada musim semi 2019, adalah mobil yang dapat melewati rintangan tanpa kendali pengemudi.
Jadi apa yang ada di dalam hatinya?
Mobil ini didasarkan pada algoritma canggih, aliran data, antarmuka berkinerja tinggi, dan peralatan canggih. Selain itu, mobil tidak hanya membutuhkan perangkat keras dan perangkat lunak, tetapi juga aplikasi server dan klien. Jantung teknologi ini terbuka, dan kami tidak hanya mengandalkan inisiatif dari tim StarLine, tetapi juga pada bantuan dari komunitas open-source.
Tujuan utama dari kendaraan tak berawak StarLine adalah keinginan untuk membuat hidup orang lebih nyaman dan aman. Teknologi penting bagi kami, tetapi kami percaya bahwa pengetahuan teknologi dan ilmiah ada untuk melayani orang, dan inilah jantung sebenarnya dari upaya kami. Kami mendekati hari di mana keselamatan jalan akan disediakan oleh peralatan, dan orang-orang akan memiliki kesempatan untuk mencurahkan lebih banyak waktu untuk apa yang penting bagi mereka. Dan jika Anda berbagi sudut pandang kami, maka kami senang mengundang Anda untuk bergabung dengan kami dalam menciptakan teknologi masa depan.
Proyek Gitlab