Kisah ini adalah tentang bagaimana saya membangun platform robot seluler dan nasib "NanoBot-a" saya ...
Semuanya dimulai pada tahun 2008, ketika saya masih muda yang naif dan bodoh, saya terlibat dalam robotika dan, secara umum, berbagai mekatronik. Gagasan membangun troli besar menetap di kepala saya yang penuh kegembiraan jauh lebih awal, dan sekarang, setelah kehamilan yang panjang dari rencana pembuatan, saya mulai membangun keajaiban pikiran anak-anak ini.
Dan saya melahirkan prototipe seperti itu:

Bingkai dari pipa profil bagian persegi 25x25mm. Dan dimensi keseluruhannya adalah 500x500x300 mm. Ya, kalau begitu, saya berpikir dalam skala besar ... Dua motor roda gigi dari penghapus mobil UAZ, mengendarai roda dari sepeda anak-anak kecil, harus memindahkan benda ini, dan di depan ada dua penunjuk arah cuaca. Dan raksasa ini dibangun di apartemen.
Mengingat fakta bahwa rencana untuk algoritma perilaku adalah "Napoleonic", komputer yang lengkap harus ada di robot, tidak ada uang untuk mini-ITX, dan saya menemukan PC biasa pada ibu ATX saya. Semua ini dipompa ke bagian dalam dan ke tumpukan dua baterai helium lagi, menyelubungi semuanya dengan org tiga milimeter. kaca dan secara umum alat itu ternyata sebagian indah, tetapi sangat besar dan berat. Saya tidak berhasil menjalankannya, karena kesulitan muncul dengan elektronik, dan dari waktu ke waktu saya kadang-kadang meninggalkan proyek, kemudian mulai bekerja lagi ...

Pada akhirnya, saya menyadari bahwa desain ini sangat rumit, dan karena ide utama masih ada di kepala saya, diputuskan untuk memulai dari awal lagi ...
Setelah hampir satu tahun, saya mulai mendesain. Kemudian saya hanya tertarik pada CAD dan mencoba mempelajarinya sendiri, sebagai hasilnya saya membuat gambar pertama di AutoCAD dan sedikit kemudian saya menerjemahkannya ke dalam 3D (ketika saya mulai belajar COMPASS 3D). Saya akan memberikan gambar dan model untuk akses gratis, siapa tahu siapa yang akan berguna atau akan menarik.
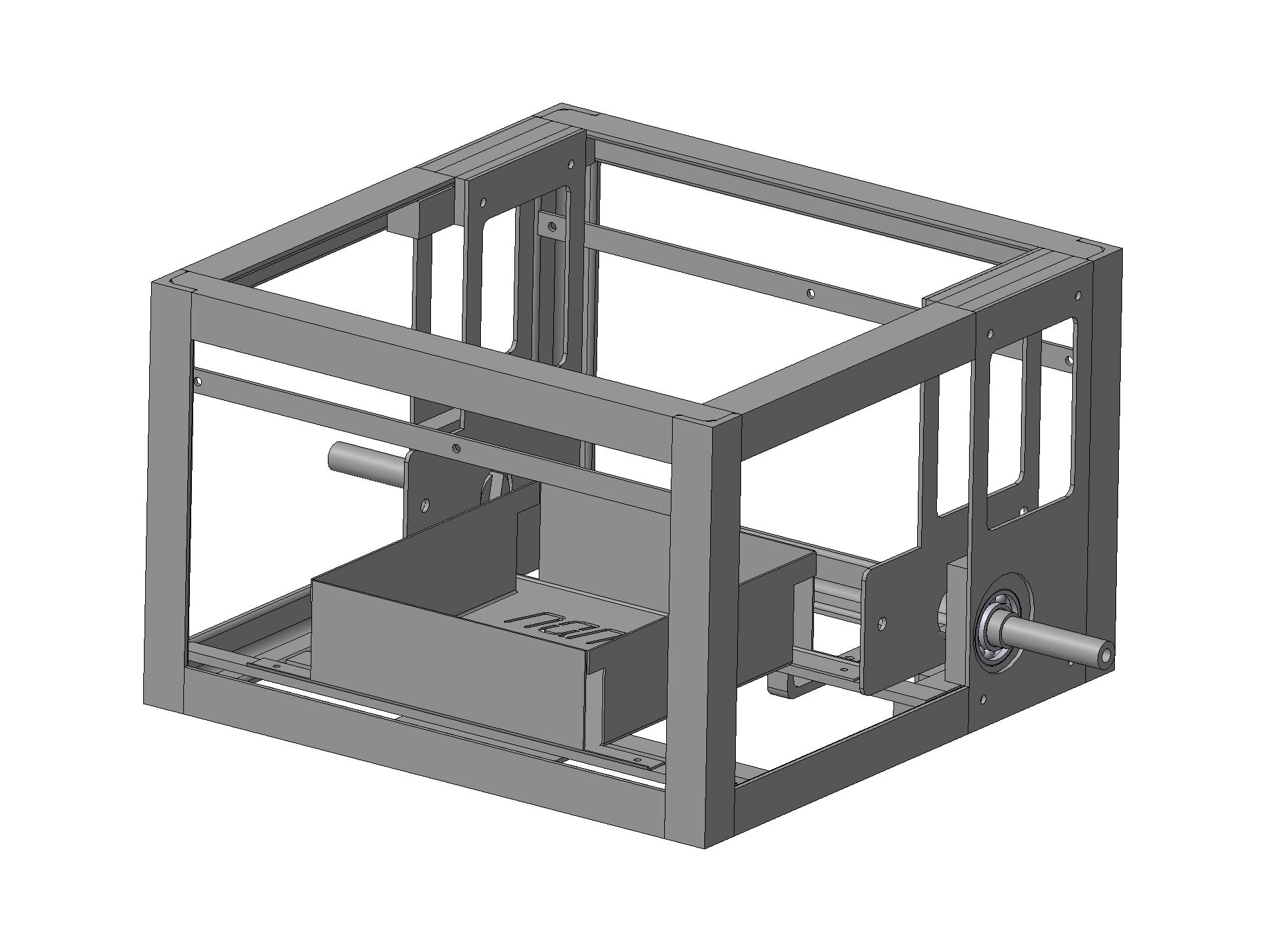
Saya memberikan gambar-gambar itu ke pabrik yang saya kenal, di mana sebuah bingkai dibuat untuk saya dengan beberapa botol vodka (Rusia - yang harganya mahal). Dalam ukuran, itu sudah lebih kecil dari 300x300x200 sebelumnya, dan dibuat dari sudut kedua puluh. Selain itu, pelat untuk pengencang mesin dan wadah untuk meletakkan dua baterai 12-volt dipotong oleh laser CNC.

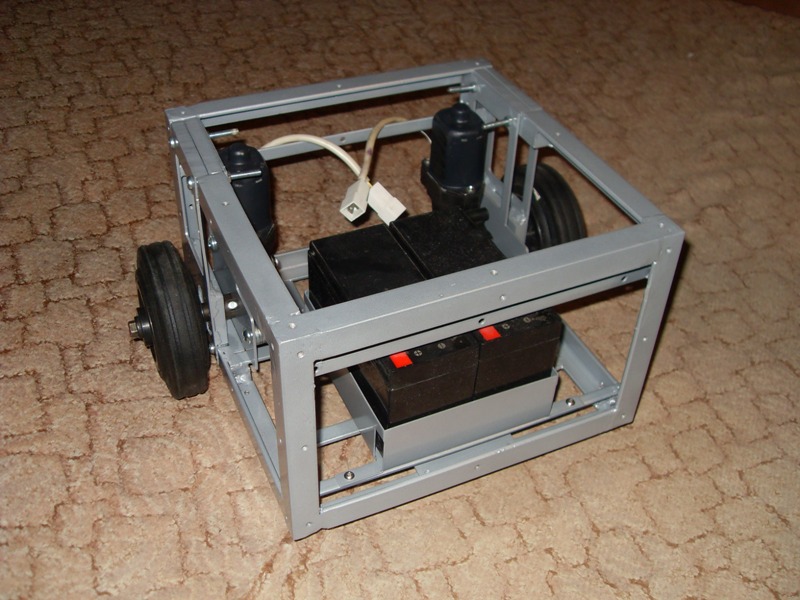
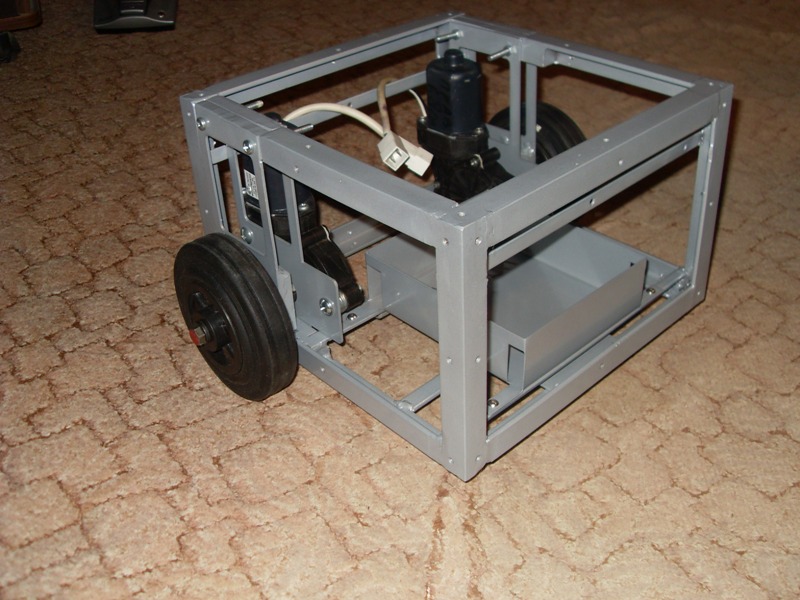
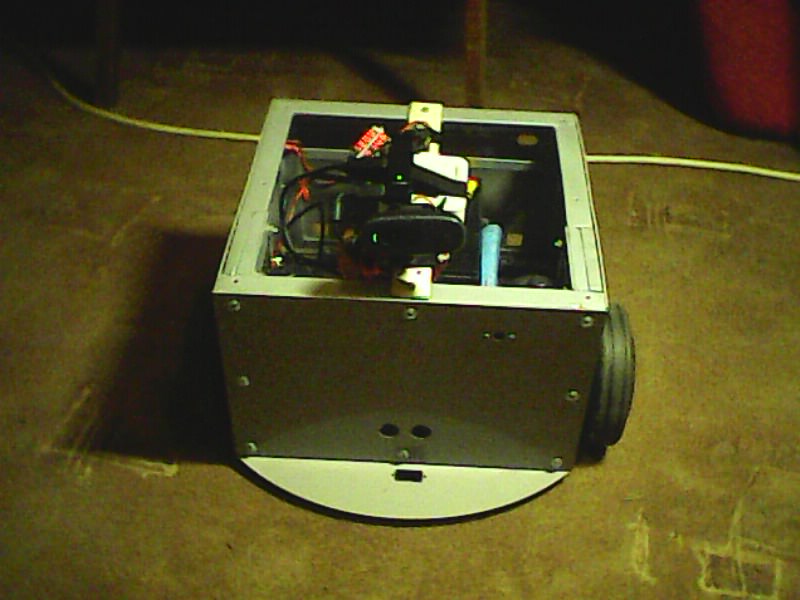
Karena semua ini dilakukan untuk waktu yang lama, bingkai berhasil berkarat, kemudian, saya memberikannya pada lukisan bubuk. Roda dengan diameter 125 mm dipasang langsung ke engine melalui semi-sumbu tambahan yang dipasang pada bantalan bola. Di depan dipasang satu roda baling-baling kecil. Saya memutuskan untuk menyepuh bingkai dengan besi, maka itu tampak lebih teknologi daripada dipotong dari org. kaca, karena saya tahu kantor tempat mereka memotong baja pada CNC, dan kemudian bisa dicat dengan warna apa pun ...


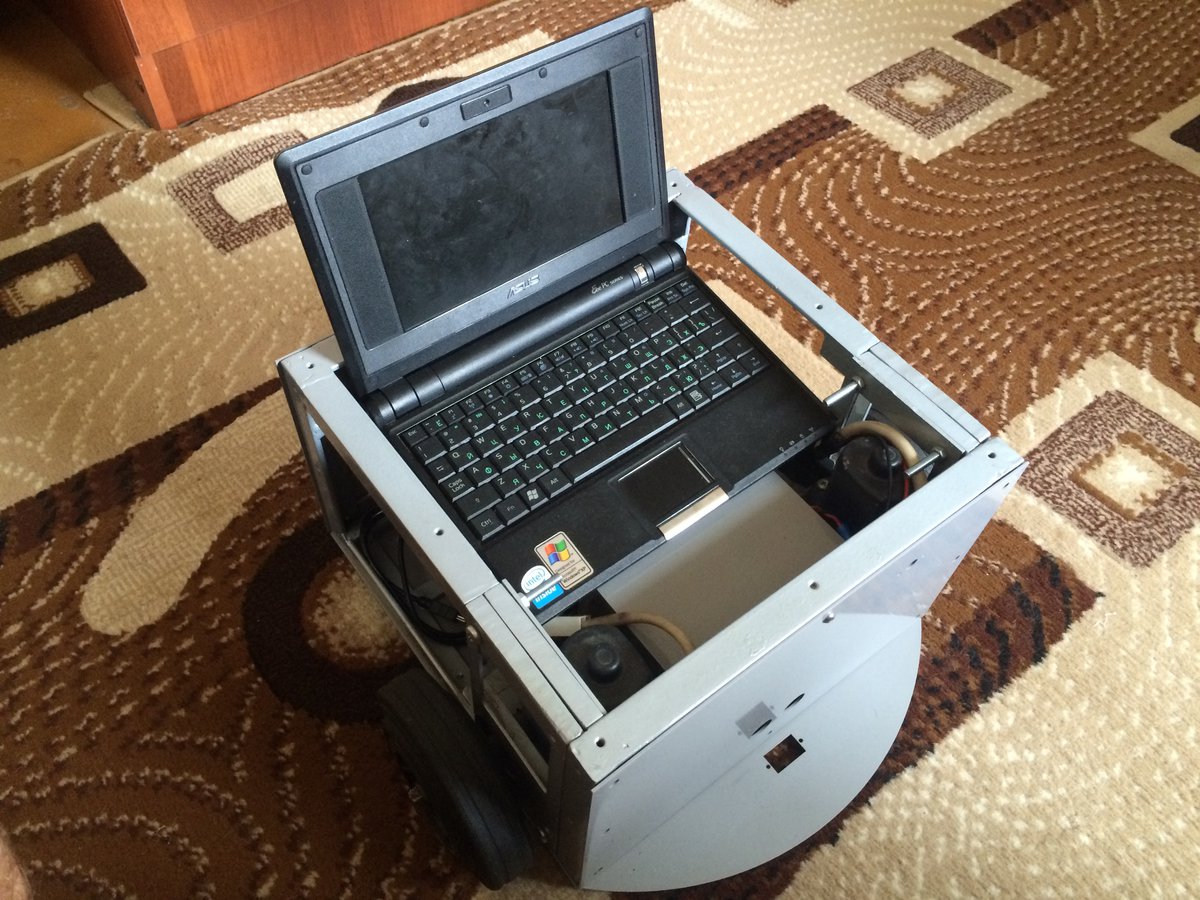
Dengan bingkainya, semuanya tampak jelas, mari beralih ke elektronik. Direncanakan untuk mengendalikan robot dari jarak jauh dari PC, dan di atas robot itu juga direncanakan untuk memasukkan sesuatu dari komputer kecil. Pada saat itu, saya sudah berhasil memotong netbook ASUS lama dari saudara, dalam ukuran yang pas ke bagian atas robot di atas baterai. Tetapi untuk mengendalikan robot, satu netbook tidak cukup, untuk ini perlu membeli tiga papan lagi dari "Open Robotics", sebuah papan berbasis pada mikrokontroler AVR untuk mengendalikan dan mengumpulkan data OR-AVR-M128-DS, papan untuk komunikasi dengan netbook OR-USB-UART dan driver papan daya OR-MD2-10A-12V-X, sekarang saya pasti akan melakukan segalanya pada Arduino, tapi kemudian itu tidak begitu populer, dan modul ini dirancang khusus untuk gerobak robot. Direncanakan untuk menghubungkan beberapa sensor pengintai, sepasang enkoder ke papan kontrol, dan direncanakan untuk mengontrol beberapa servo untuk mengubah sudut pemindaian pengukur jarak. Saya ingin membuat range finder berdasarkan laser pointer dan kamera video. Tetapi tidak pernah sampai pada itu, semuanya terbatas pada menghubungkan elektronik dan menulis program sederhana untuk manajemen. Dikelola dari jarak jauh menggunakan program TeamViewer. Dalam program saya ada koneksi sederhana ke port, jendela penerimaan transmisi data, jalur input kecepatan (PWM dalam persen), dan beberapa tombol arah.
Akibatnya, karena kesalahpahaman dengan elektronik, proyek itu dibiarkan tanpa perhatian, itu ditangani sekali sangat jarang. Seiring waktu, saya menyadari bahwa sangat disayangkan untuk membuang pengembangan atau memasukkannya ke garasi. Saya memutuskan untuk menjual dengan nilai simbolik. Saya pikir mungkin ada orang yang juga tertarik dengan hal ini, yang memiliki pengetahuan yang lebih baik tentang elektronik dan pemrograman, mungkin seseorang sedang mengerjakan beberapa jenis perilaku / algoritma pergerakan, baik, atau seseorang hanya membutuhkan platform periklanan di ruang pamer atau toko (tentu saja, ia dapat mematahkan kakinya. )
Saya menjual seluruhnya, bersama dengan elektronik, baterai, netbook, rangefinders, dan servos (guntingan persegi panjang dengan dua lubang di penutup putaran atas dan bawah untuk MG996r servos), layar 16x2, dan sepasang susunan LED (guntingan persegi di lembar kelongsong depan tepat di bawahnya).

Seperti yang saya pahami, orang yang membeli platform robot saya memberinya kehidupan kedua Saya senang bahwa besi ini akan hidup. Itu pada tahun 2016, dan perjalanan dimulai dari kota Ivanovo yang mulia, ke kota pahlawan Tula.
Namun, baru-baru ini, pemilik ketiga menghubungi saya dan mengatakan bahwa sekarang ia memiliki platform (wilayah Kaliningrad). Rupanya, ada yang tidak beres dengan pembeli pertama ... Orang yang menghubungi saya tidak mengecewakan saya, tetapi platform diserahkan kepadanya tanpa beberapa komponen terkait, tetapi sebaliknya semuanya tampak utuh, tetapi tidak mengejutkan, karena kulit robot terbuat dari logam 1.5 tebal, saatnya untuk berpartisipasi dalam pertempuran robot ...
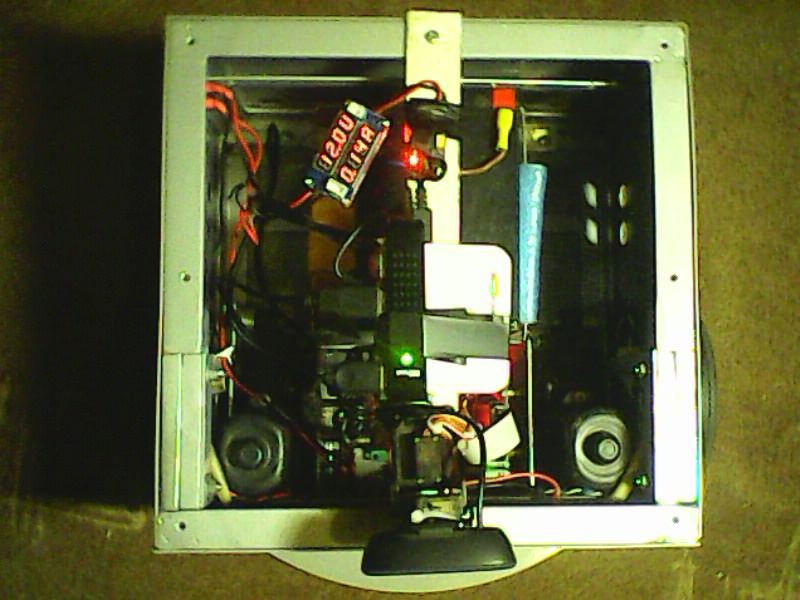
Robot menerima beberapa peningkatan, dan inilah yang ditulis oleh pemilik baru tentang hal itu:
“Platform telah datang kepada saya. Dengan beberapa manipulasi, baterai 10 Ah 12V disediakan, router TL-MR3020 dengan firmware OpenRobotisc kustom, webcam Logitech C270 pada braket dengan servo, hub-mikro untuk 4 port dan konverter DC-DC untuk menyalakan router ditambahkan. Kemudian semua ini dibaut dengan screed, pita listrik dan sarana improvisasi lainnya. "Dia HIDUP! (C) Robocip" Orang bodoh besi 18 kg bergegas di sekitar ruangan kecil seperti tersiram air panas dan mampu merobohkan kaki dan mematahkan kaki paling buruk ... Kita perlu mengubah roda ke yang normal, mengubah roda dukungan, memperbaiki elektronik normal dan mengolah kabel. Dan setelah semua perbaikan dan perbaikan, kotak ajaib ini akan dapat berkeliling halaman menakut-nakuti kucing dan tetangga wino. Dan jika Anda menempatkan manipulator Cina di 6 server, maka Anda dapat mengais objek dari jarak jauh. "
Dan ini dari berita terbaru, segar:
Berikut ini adalah cerita tentang bayi saya, saya berharap bahwa pemilik baru tidak akan meninggalkan robot, dan dia akan hidup untuk waktu yang lama (baik pemilik maupun robot). Kalau tidak, nasib anjungan akan dikubur di bawah pohon apel untuk menjenuhkan tanah dengan besi. Ini, tentu saja, adalah manfaat yang pasti untuk pohon apel, tetapi bukan tujuan langsung dari robot yang dibuat.
Adapun nama "NanoBot", maka semuanya cukup sederhana. Mungkin banyak orang mengingat jumlah iklan yang sangat besar (di kotak zombie), di mana ada awalan "nano" yang populer sehingga saya memutuskan untuk menambahkan awalan ini ke nama robot saya, terutama karena itu sepenuhnya menggambarkan parameter fisiknya.