Di Universitas ITMO, berdasarkan Departemen Sistem Kontrol dan Informatika (SUII), sebuah laboratorium robotika dibuka. Kami akan memberi tahu tentang proyek-proyek yang sedang dikerjakan di dalam dindingnya, dan menunjukkan alat-alat: manipulator robot industri, perangkat pengikat robot, serta instalasi untuk menguji sistem penentuan posisi dinamis menggunakan model robot dari kapal permukaan.

Spesialisasi
Laboratorium Robotika milik departemen tertua Universitas ITMO, yang disebut "Sistem Kontrol dan Ilmu Komputer". Dia muncul pada 1945. Laboratorium itu sendiri diluncurkan pada tahun 1955 - kemudian ditangani dengan masalah otomatisasi pengukuran dan perhitungan parameter kapal permukaan. Kemudian, rentang arah diperluas: menambahkan sibernetika, CAD, dan juga robotika.
Saat ini, laboratorium meningkatkan robot industri. Karyawan memecahkan masalah yang terkait dengan interaksi manusia-mesin - mereka mengembangkan algoritma kontrol yang aman dengan kontrol kekuatan robot, dan juga bekerja pada robot kolaboratif yang dapat melakukan tugas berdampingan dengan orang-orang.
Laboratorium juga mengembangkan metode alternatif untuk kendali jarak jauh kelompok robot dan membuat algoritma perangkat lunak yang dapat dikonfigurasi ulang untuk melakukan tugas baru secara online.
Proyek
Sejumlah sistem robot laboratorium telah diperoleh dari perusahaan besar dan dimaksudkan untuk tujuan penelitian atau industri. Bagian dari peralatan dibuat oleh karyawan sebagai bagian dari penelitian dan pengembangan.
Dari yang terakhir,
platform robot Stuart dengan dua derajat kebebasan dapat dibedakan. Instalasi akademik dirancang untuk menguji algoritma kontrol untuk menjaga bola di tengah situs (Anda dapat melihat sistem beraksi dalam
video ini ).
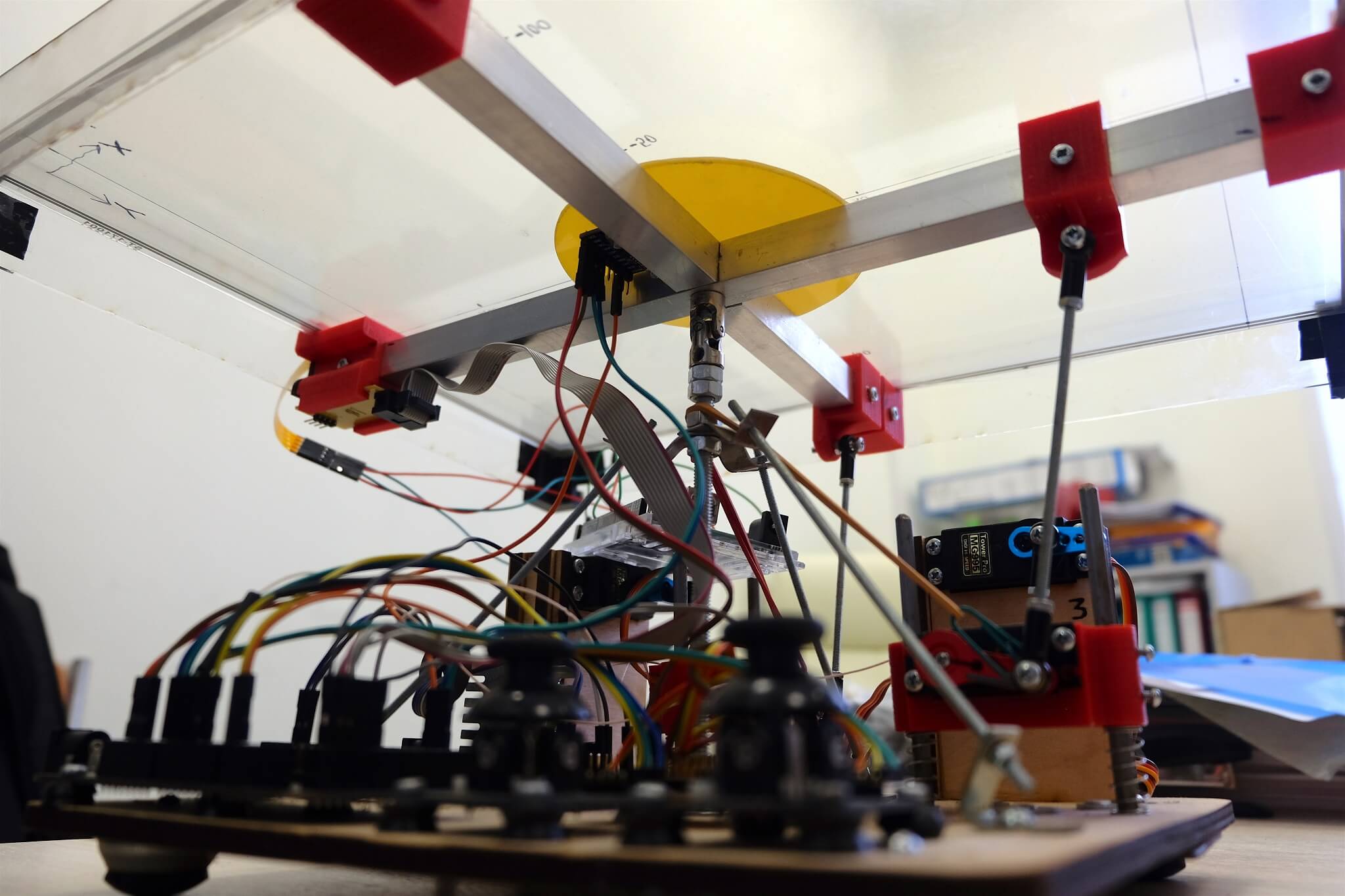
Kompleks robot terdiri dari platform persegi panjang dengan substrat sensor resistif yang menentukan koordinat bola. Drive shaft dilekatkan padanya menggunakan sambungan putar. Drive ini mengubah sudut platform sesuai dengan sinyal kontrol yang diterima dari komputer melalui USB, dan tidak memungkinkan bola bergulir.
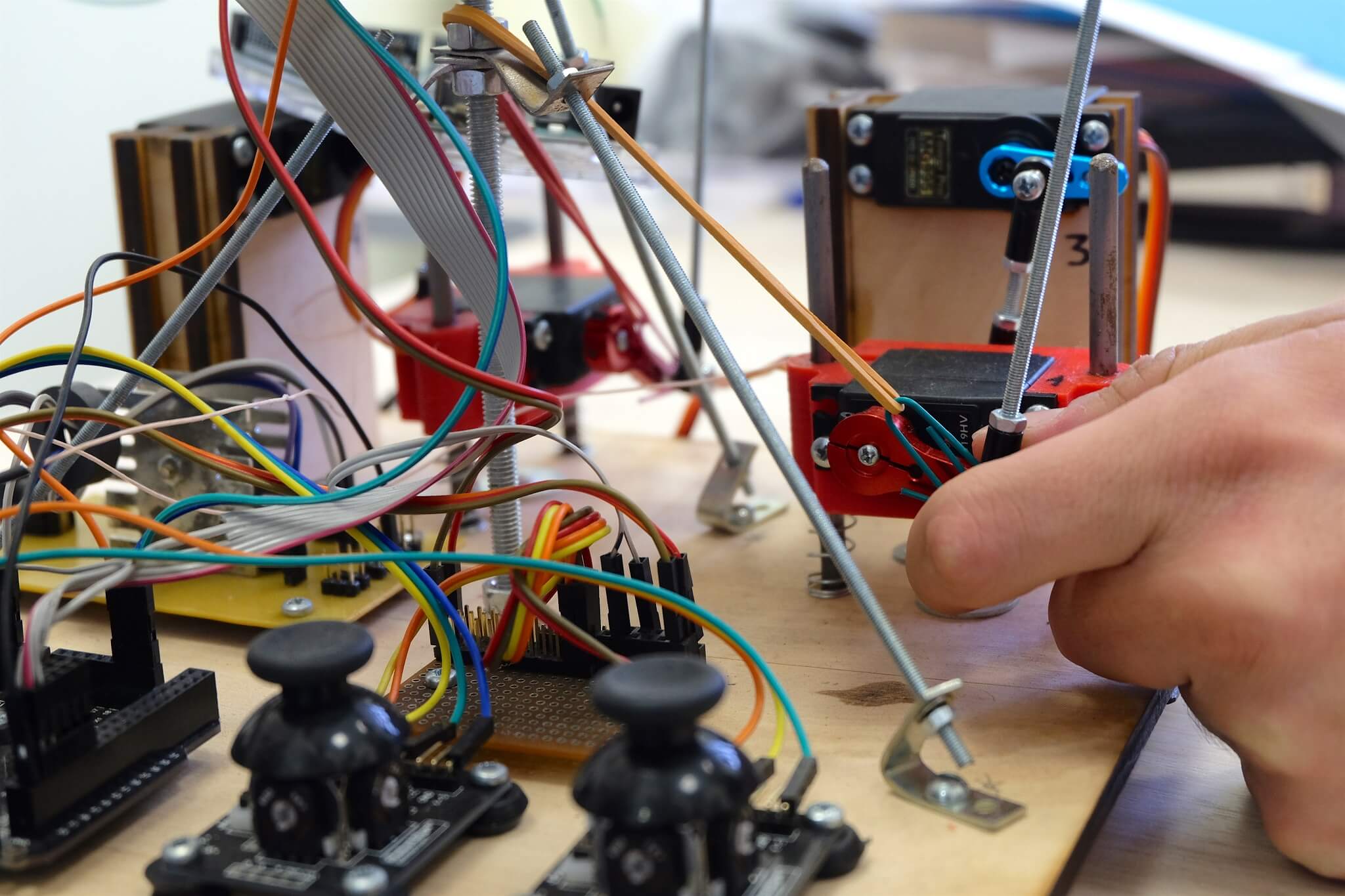
Kompleks ini memiliki servos tambahan yang bertanggung jawab untuk mengkompensasi gangguan. Untuk pengoperasian drive ini, staf laboratorium mengembangkan algoritme khusus yang “menghaluskan” berbagai jenis gangguan, seperti getaran atau angin.
Selain itu, di taman robot laboratorium terdapat fasilitas penelitian
KUKA youBot , yang merupakan lengan robot lima tautan yang dipasang pada platform seluler dengan roda omnidirectional.

KUKA youBot menguji algoritma
kontrol adaptif untuk melacak target bergerak . Mereka menggunakan sistem penglihatan yang didasarkan pada kamera digital dan prosedur pemrosesan video. Dasar dari proyek ini adalah penelitian di bidang kontrol adaptif sistem nonlinier, yang dilakukan oleh staf laboratorium.
Algoritma kontrol digunakan untuk mengkompensasi pengaruh eksternal yang bekerja pada tautan robot. Hasilnya, mesin dapat menahan alat kerja pada titik tetap di ruang dan memindahkannya secara stabil di sepanjang lintasan yang diberikan.
Contoh dari proyek yang diimplementasikan berdasarkan robot KUKA youBot adalah
sensasi momen tanpa sensor . Bersama dengan perusahaan Inggris TRA Robotics, kami mengembangkan algoritma yang memungkinkan kami menilai kekuatan interaksi alat kerja dengan lingkungan tanpa sensor torsi yang mahal. Ini memungkinkan robot untuk melakukan operasi yang lebih kompleks tanpa menggunakan sistem eksternal.

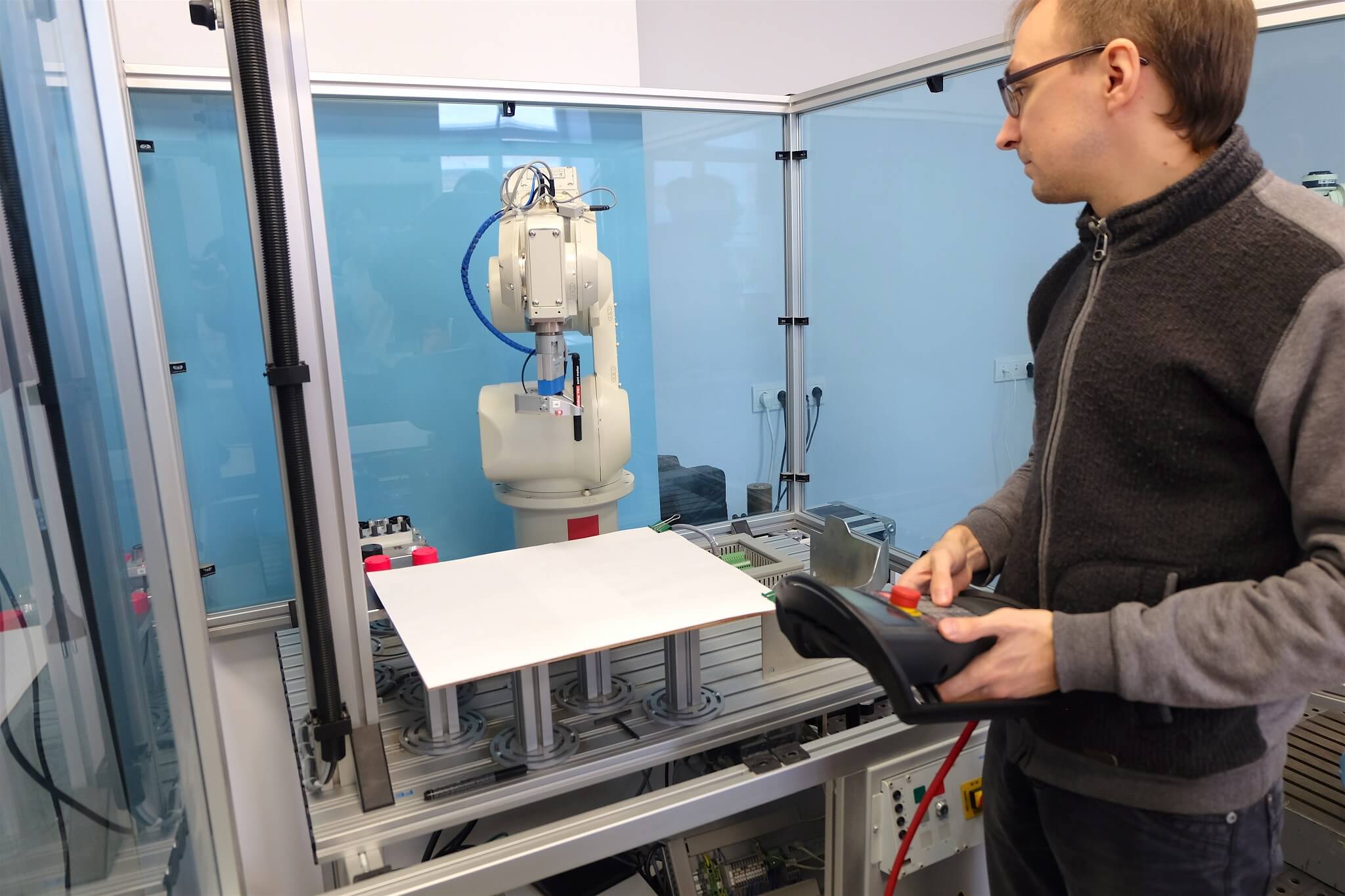
Contoh lain dari instalasi robot di laboratorium adalah
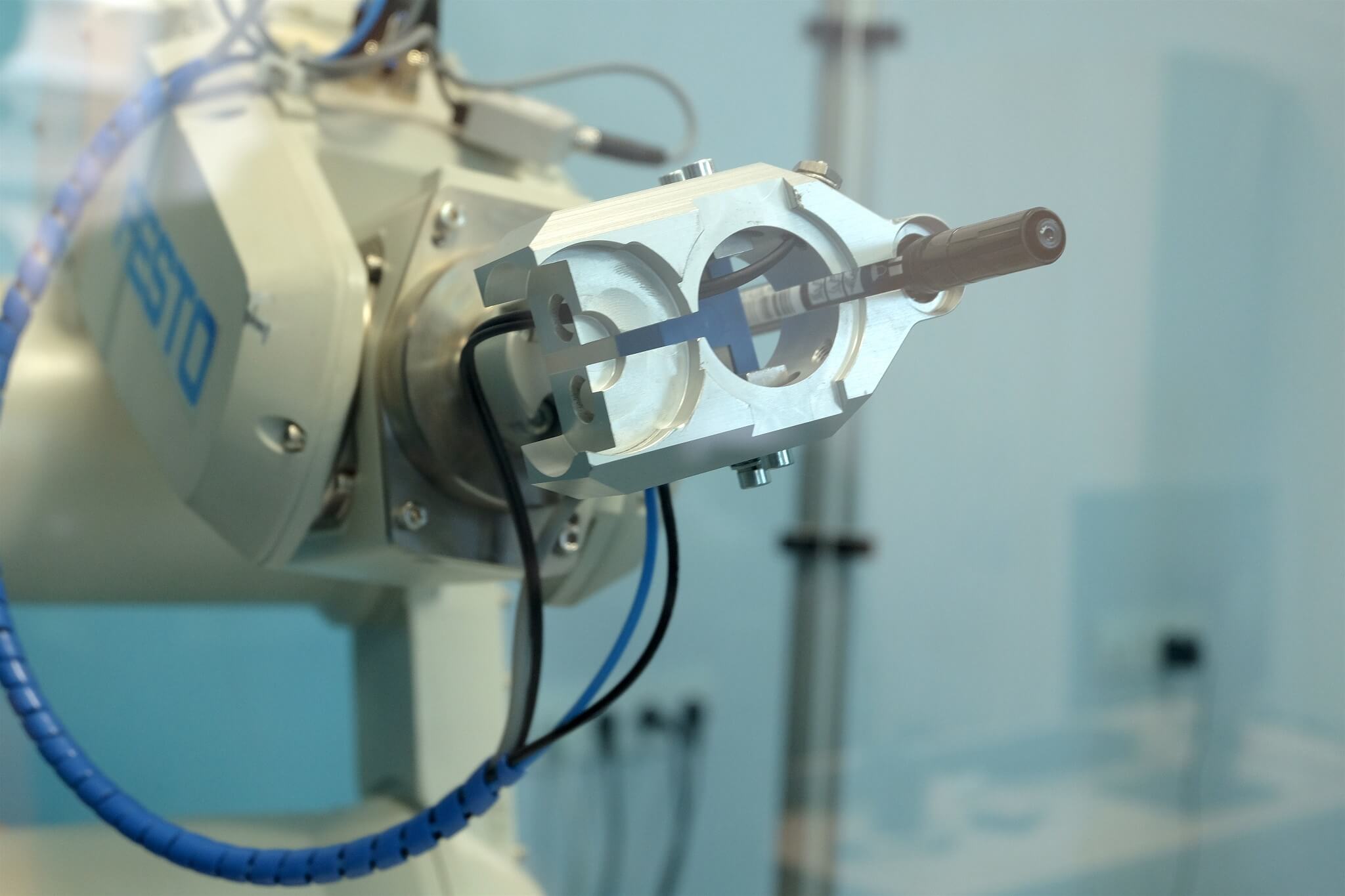
FESTO Robot Vision Cell . Kompleks ini digunakan untuk
mensimulasikan operasi teknologi dalam produksi, seperti pengelasan. Untuk menerapkan skenario ini, tugas perencanaan gerak diajukan: alat las simulasi memotong kontur bagian logam.
Selain itu, sel dilengkapi dengan sistem penglihatan dan mampu menyelesaikan tugas menyortir bagian berdasarkan warna atau bentuk.
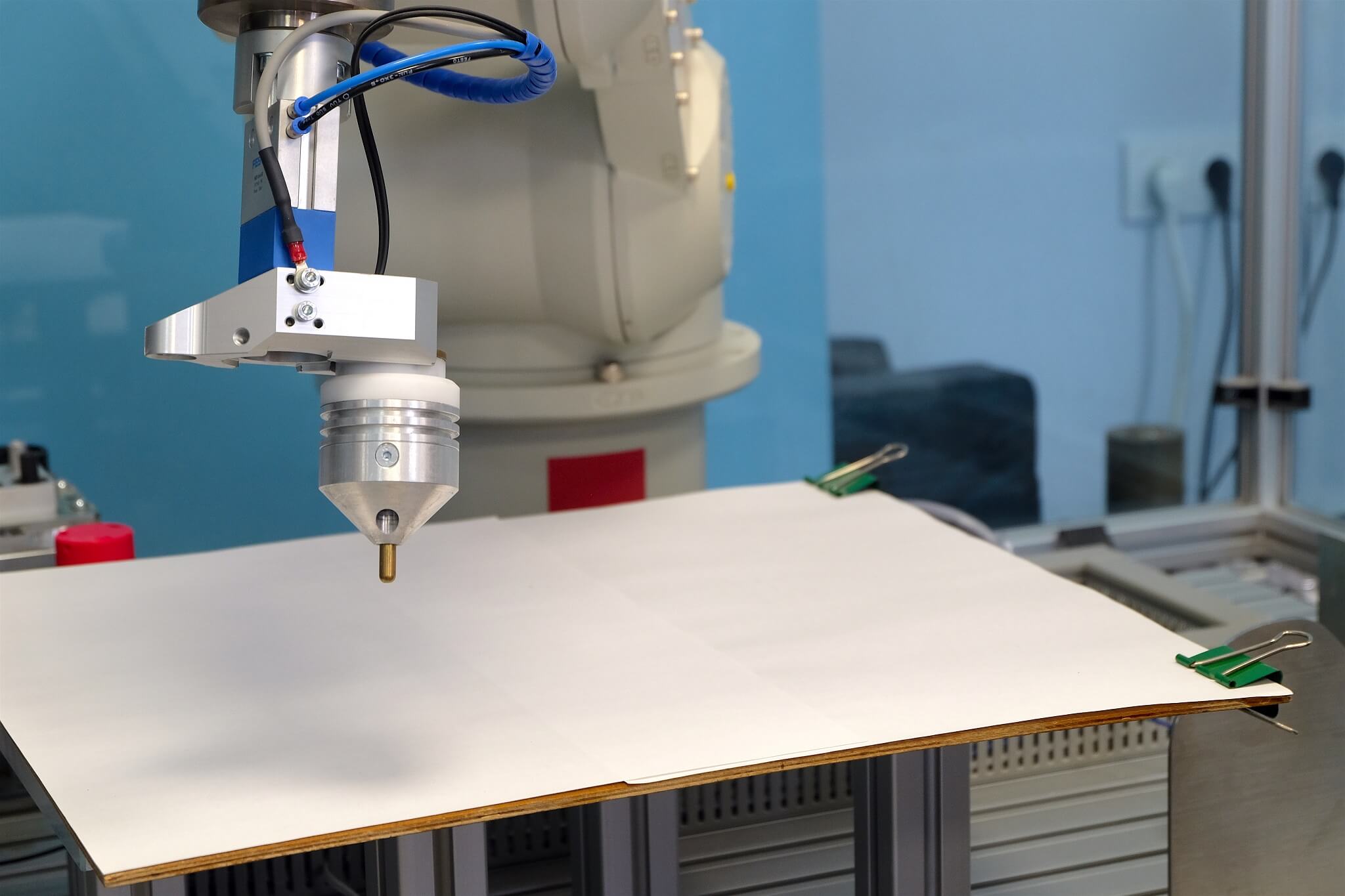
Proyek ini, yang didasarkan pada sel robot FESTO Robot Vision Cell dengan robot industri Mitsubishi RV-3SDB, menyelesaikan tugas perencanaan gerak.
Ini membantu menyederhanakan proses interaksi operator dengan pengontrol robot ketika memprogram jalur yang rumit. Idenya adalah untuk secara otomatis memprogram pergerakan alat robot menggunakan kontur yang ditunjukkan dalam bitmap. Cukup mengunggah file ke sistem, dan algoritme akan secara mandiri mengatur titik referensi yang diperlukan dan menyusun kode program.
Dalam praktiknya, solusi yang dihasilkan dapat digunakan untuk ukiran atau menggambar.
Kami memiliki
video di saluran di mana "artis robot" kami menggambarkan potret A. S. Pushkin. Juga, teknologi ini dapat digunakan untuk pengelasan bagian-bagian yang bentuknya kompleks. Faktanya, ini adalah kompleks robot yang memecahkan masalah industri dalam kondisi laboratorium.
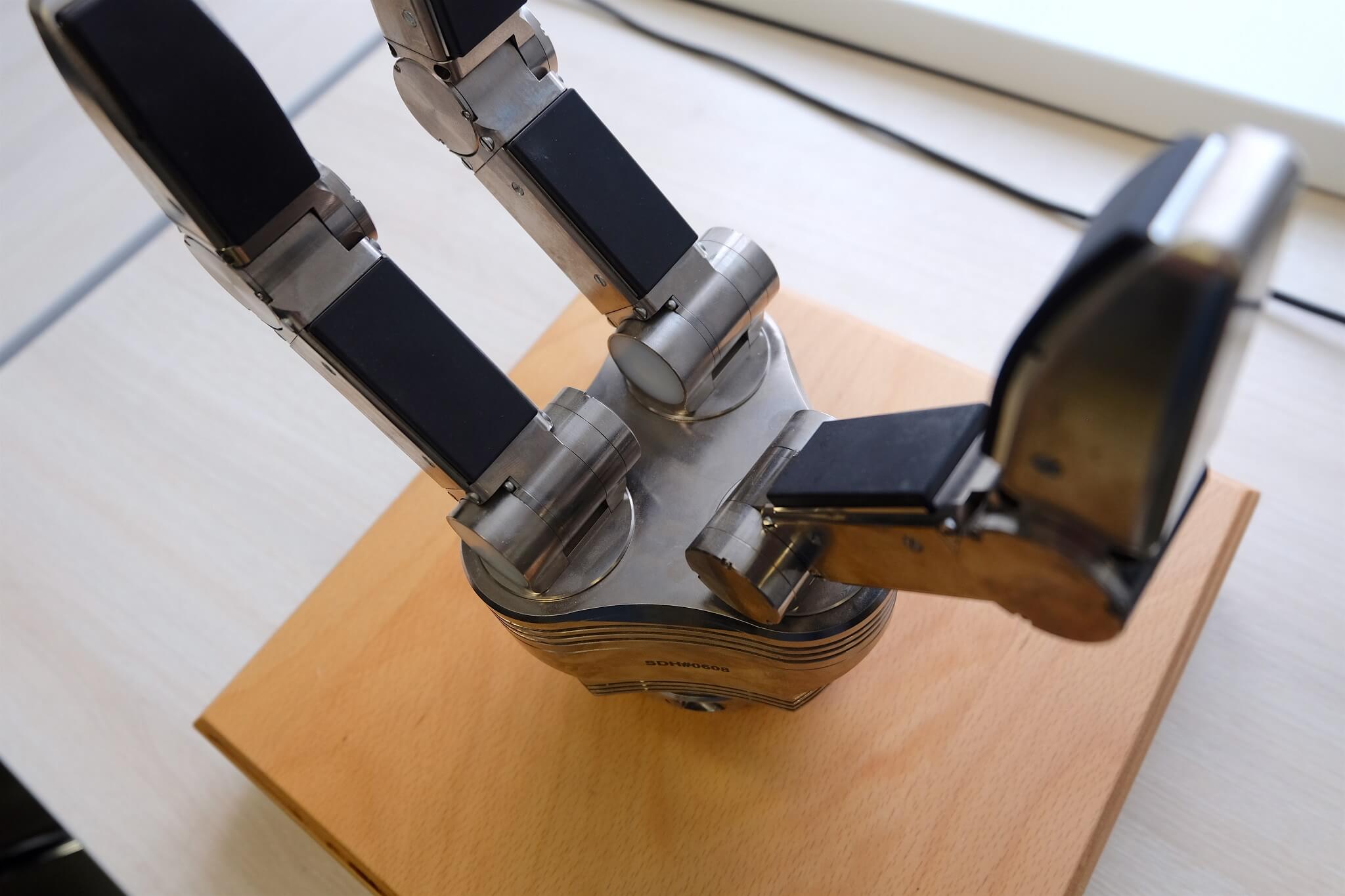
Laboratorium juga memiliki gripper tiga jari yang dilengkapi dengan sensor tekanan yang terletak di permukaan bagian dalam jari.
Perangkat semacam itu memungkinkan penanganan benda-benda rapuh ketika penting untuk secara tepat mengontrol kekuatan cengkeraman untuk menghindari kerusakan.
Laboratorium ini memiliki
model robot kapal permukaan , yang dirancang untuk menguji sistem penentuan posisi dinamis.
Model ini dilengkapi dengan beberapa drive eksekutif, serta perangkat keras komunikasi radio untuk mentransmisikan sinyal kontrol.

Ada kolam renang di ruang laboratorium, di mana pengoperasian algoritma kontrol
untuk menjaga posisi model kecil kapal permukaan dengan kompensasi perpindahan longitudinal dan transversal diperiksa.
Saat ini, direncanakan untuk mengatur kumpulan besar untuk tes skala besar dengan skenario yang rumit.

Bekerja dengan mitra dan rencana
Salah satu mitra kami adalah perusahaan Inggris TRA Robotics. Bersama-sama kami
bekerja untuk meningkatkan algoritma kontrol robot industri untuk perusahaan manufaktur digital. Di perusahaan semacam itu, seluruh siklus produksi: dari pengembangan hingga pembuatan produk industri, akan dilakukan oleh robot dan sistem AI.
Mitra lain termasuk kepedulian Elektropribor, bersama dengan mana kami sedang
mengembangkan sistem mekatronika dan robot. Siswa kami membantu kepedulian di bidang instrumentasi, pengembangan perangkat lunak, dan tugas produksi.
Kami juga
bekerja sama dengan General Motors, kami
mengembangkan robotika dengan InfoWatch. Selain itu, staf laboratorium berinteraksi erat dengan perusahaan
Navis JSC , yang mengimplementasikan proyek untuk pengembangan sistem penentuan posisi dinamis untuk kapal permukaan.
Laboratorium Robotika Pemuda beroperasi berdasarkan Universitas ITMO, tempat anak-anak sekolah bersiap untuk kompetisi kelas dunia. Misalnya, pada 2017, tim kami
memenangkan Olimpiade Robot Dunia di Kosta Rika, dan pada musim panas 2018, siswa kami
mengambil dua hadiah di Olimpiade Semua-Rusia untuk anak sekolah.
Kami
berencana untuk menarik lebih banyak mitra industri dan mendidik generasi muda ilmuwan Rusia. Mungkin mereka akan mengembangkan robot seperti itu yang secara organik melengkapi dunia orang dan akan melakukan tugas yang lebih rutin dan berbahaya di perusahaan.
Tur foto-foto laboratorium lain di Universitas ITMO: