Halo, peserta dan tamu yang terhormat di situs ini. Saya akan mencoba sesingkat mungkin dalam topik ini. Booming robotika dalam beberapa tahun terakhir, banyak perhatian pada topik ini tidak bisa membuat saya acuh tak acuh.
Mengejar mimpi masa kecil membuat robot, saya sampai di forum
cyber-place.ru untuk mencari informasi sekitar setahun yang lalu (jangan menganggapnya sebagai iklan). Dalam fantasi terliar saya, saya memiliki pemikiran untuk membuat robot telepresence saya sendiri, dengan kemampuan untuk bergerak dalam ruang, video dan komunikasi audio dua arah, dengan remote control melalui telepon atau komputer. Saya terinspirasi oleh model yang didasarkan pada router tplink 3020 dengan firmware Cyberwrt. Kurangnya pengetahuan tentang topik dan kesenjangan besar dalam pendidikan tidak mengganggu keinginan manik saya untuk mencapai hasil, sebagai hasil dari trial and error dan elektronik terbakar.
Setelah hampir satu tahun "belajar dari kesalahan saya", hasil pertama muncul, sebuah mesin dengan kemampuan untuk mengontrol melalui Internet berbasis Cyberbot -3, yang banyak terima kasih kepada para pengembangnya, mereka melakukan pekerjaan yang sangat hebat! (Bagi saya, pemrograman dan pembuatan perangkat lunak hanya ruang!) Banyak orang melakukan mesin tik, peralatan dan instruksi terperinci ada di hamparan luas Internet. Karena itu, untuk memikirkan ini saya tidak melihat alasan.

Lebih jauh, muncul kebutuhan untuk otonomi perangkat, yang dibangun (dari cara yang diimprovisasi) sebagai "stasiun pengisian", dan mengamankan kontak pegas di depan robot. Kekuatan utama robot dipilih 4.2V untuk kemungkinan pengisian daya dari catu daya 5V. Untuk meningkatkan arus pengisian, dua modul TP4056 disolder secara paralel. Semua ekonomi ini dikelola melalui Internet melalui telepon, melalui peramban.


Setelah cukup bermain dengan model yang saya putuskan, saya harus melanjutkan. Sayangnya, saya tidak menemukan cara (saya pikir semuanya masih di depan) untuk mengelola perangkat berdasarkan satu, pengendali utama.
Karena peralatan ini tidak memungkinkan komunikasi audio dua arah, saya tidak bisa menemukan cara yang lebih baik bagaimana menggunakan kamera pengintai DS-2CD2432F-IW, kamera ini dengan dukungan perangkat lunak pihak ketiga di android (tinyCam PRO) memungkinkan pemantauan video dan audio dua arah. Awalnya, ada ide (gila) untuk terhubung ke konektor teknik kamera untuk membaca uart, menggunakan perangkat lunak kamera standar untuk mengontrol pergerakan gerobak robot. Gunakan kamera PTZ untuk bergerak. Saya berencana untuk mempertimbangkan tim mana yang berbaring di atas ketika saya menekan kiri, kanan, bawah, atas oleh kamera yang tidak berputar, kemudian menggerakkan perintah-perintah ini ke uart arduino nano, yang seharusnya mengendalikan motor, jadi saya ingin menyelesaikan masalah utama untuk diri saya sendiri, bukan menulis perangkat lunak. Idenya tidak berhasil, pabrikan memblokir perintah-perintah ini, kecuali untuk pesan "ptz not support" ketika Anda mengklik tombol PTZ di uart tidak ada yang datang.
Karena itu, "kamera di atas roda" dan bukan robot telepresence adalah hasil dari upaya saya.
Untuk mengontrol perangkat dari ponsel, saya menggunakan kemampuan untuk membuka beberapa aplikasi di android, yang disebut "jendela mengambang" (Dalam versi yang lebih baru ini berfungsi tanpa aplikasi pihak ketiga seperti aplikasi mengambang). Anda harus membuka dua aplikasi, tinyCam PRO untuk mengakses antarmuka kamera dan browser untuk mengakses kontrol keranjang.
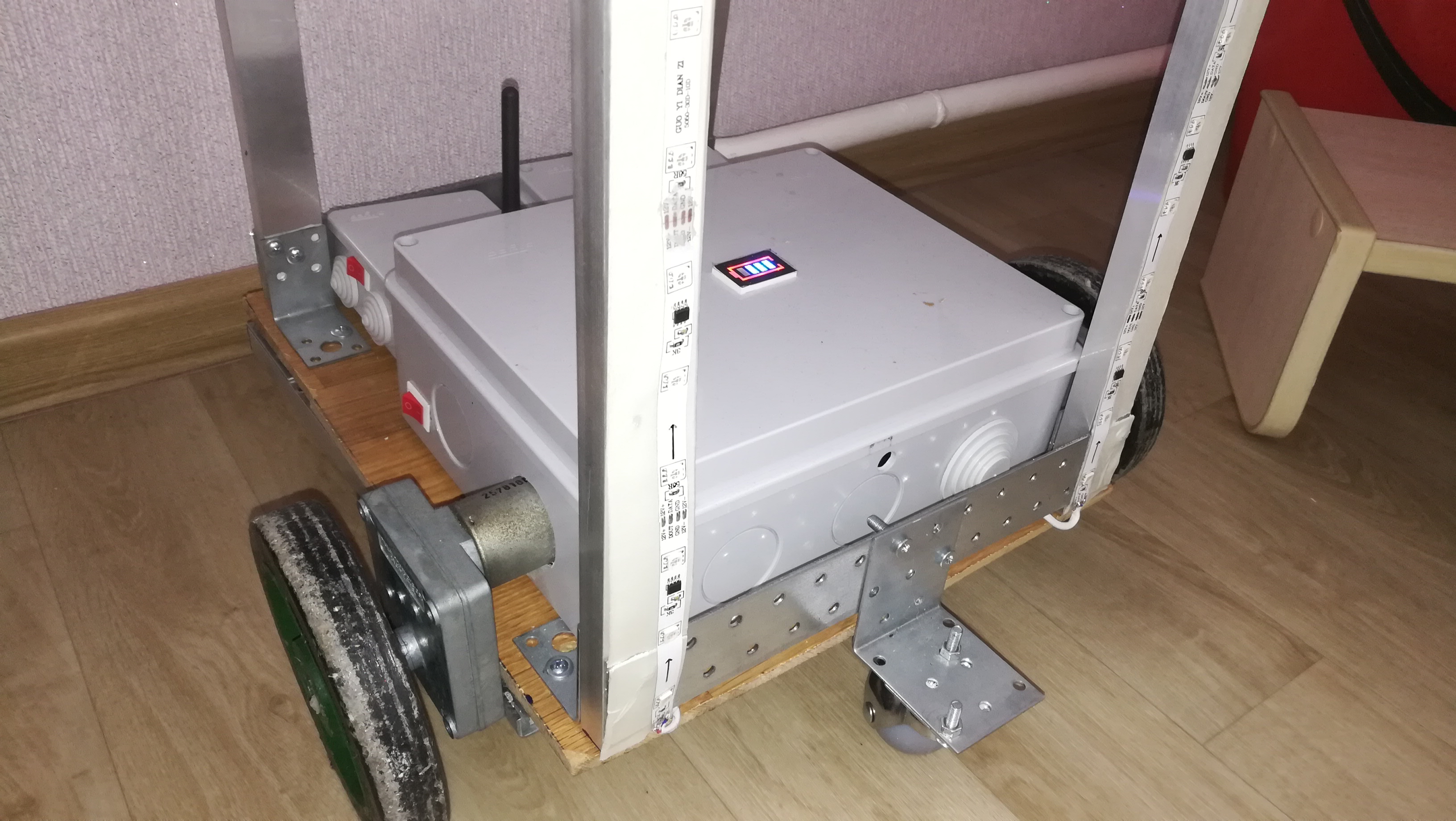
Jadi, hasilnya: kotak sambungan listrik sebagai kotak untuk menampung peralatan tp link 3020 dengan firmware CyberWRT, antena yang disolder, + 10dB dalam kasus saya, arduino nano yang menerima perintah uart dari antarmuka web router, perisai motor monster untuk mengendalikan gearbox motor yang kuat dikeluarkan dari mesin slot lama.

Tinggi robot adalah 165cm, berat sekitar 10 kg, daya 12.6V (rakitan lithium 18650 + pengendali muatan dengan penyeimbang), kaleng mayones alih-alih kepala tempat kamera disembunyikan, speaker penuh-waktu kamera diganti dengan speaker 5-watt sehingga saya dapat mendengar lebih baik . Mata - dua LED yang dimasukkan ke reflektor dari bawah lampu, mata dikontrol dari antarmuka cyberbot, dua strip LED alamat dan pengontrol mini arduino pro tambahan untuk mengendalikannya (terima kasih kepada Alex Guyver, proyeknya "lampu api" robek).
Rekaman itu dikendalikan melalui modul relay, sesuai perintah, juga melalui antarmuka cyberbot.
Penampilan canggung ini disebabkan oleh fakta bahwa robot itu berpakaian dan memberi selamat kepada rekan-rekannya pada 8 Maret. (Robot itu mengendarai musik dari terminator, dikendalikan oleh saya dari tempat terpencil, bingung oleh musik ringan dan dimasukkannya LED dengan mulus, para penonton senang).


Di masa depan saya berencana untuk menguasai pekerjaan dengan manipulator, menghapus semua "tidak perlu", pilih peralatan yang diperlukan (ganti router dan Arduino dengan ESP32) dan perangkat lunak sehingga bahkan nenek saya dapat mengelola "desain" :)) Topik itu tidak sepenuhnya diungkapkan, saya tidak membahas banyak poin agar tidak menunda posting yang panjang, jika Anda menyukai topik tersebut, saya menunggu kritik dan saran Anda.