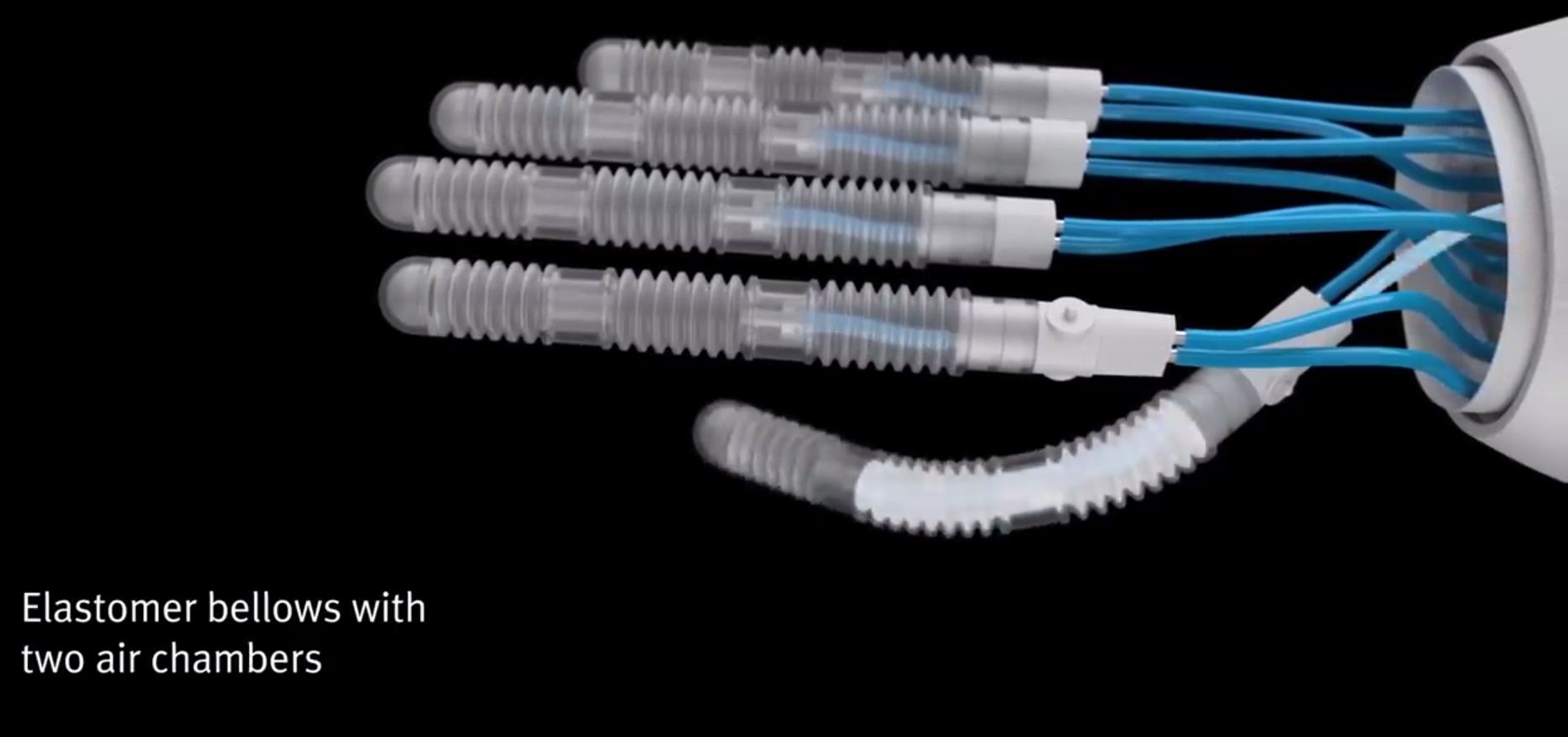
Tidak ada struktur rangka dalam solusi ini, tangan terbuat dari bahan yang lembut dan fleksibel, falang jari terbuat dari kain tekstil tiga dimensi dengan sensor sentuhan dan konduktor fleksibel yang dapat ditekuk menggunakan modul pneumatik. Simpul dengan katup dipasang di pergelangan tangan, yang menggerakkan elemen-elemen tangan, jika perlu, dengan gerakan motorik halus.
Gerakan BionicSoftHand dikendalikan oleh kecerdasan buatan, mampu belajar dengan coba-coba, dan setelah beradaptasi dengan tugas, dengan cepat dan mandiri melakukan tindakan yang diperlukan dengan objek, mirip dengan cara seseorang melakukannya

Tautan ke deskripsi dari produsen solusi
BionicSoftHand di sini .
 Lengan robot BionicSoftHand dilengkapi dengan:
Lengan robot BionicSoftHand dilengkapi dengan:- bellow tiup, di mana ada kain tiga dimensi yang terbuat dari pencetakan 3D yang terbuat dari serat elastis, yang membungkuk bersama dengan gerakan tangan ketika udara dimasukkan ke bellow, mirip dengan kerja otot dan tendon;
- modul putar pneumatik;
- terminal katup untuk 24 katup piezo;
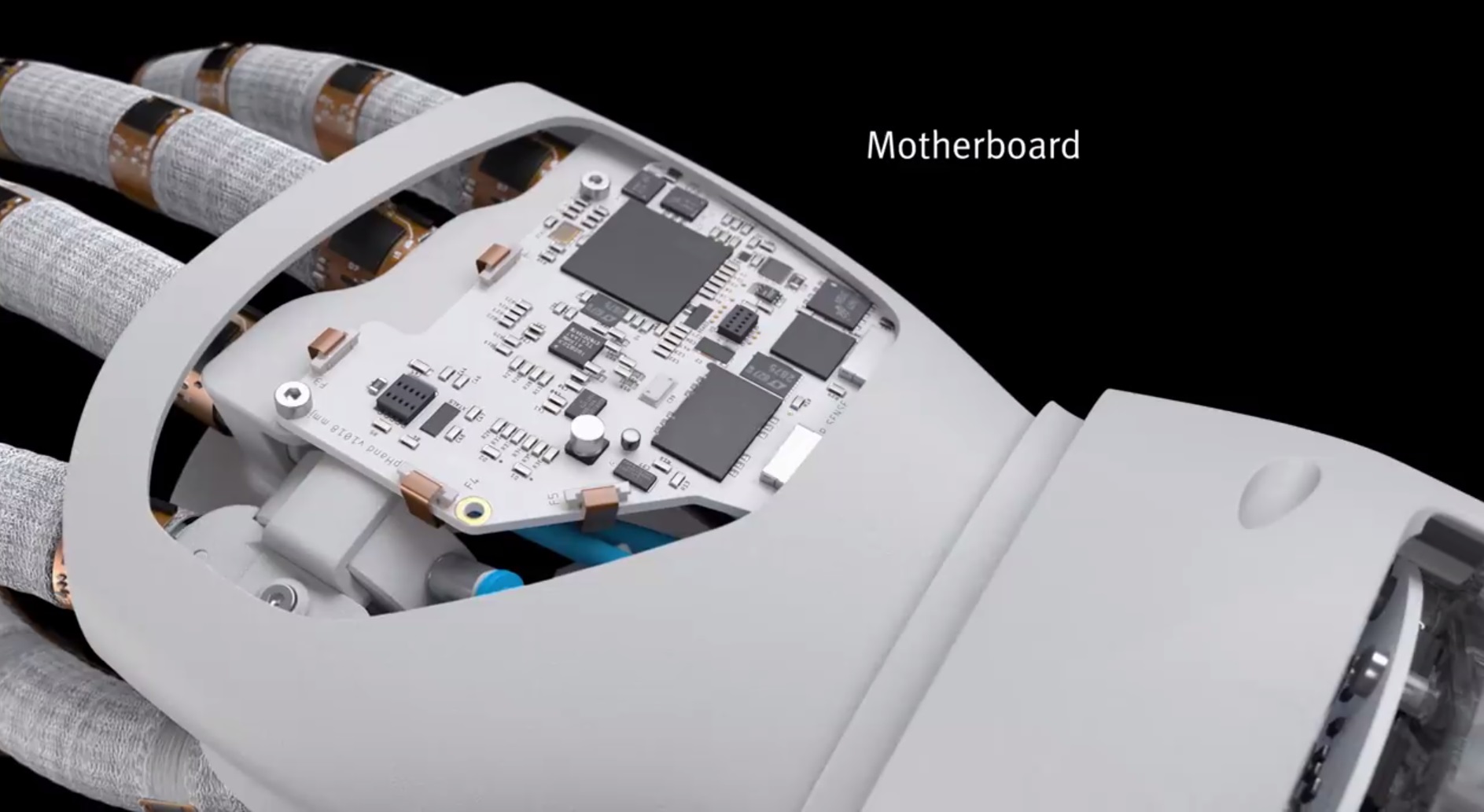
- motherboard onboard, termasuk untuk kontrol gerak otonom;
- sensor inersia (gerakan) dan gaya (dipasang di jari lembut), yang juga dibuat berdasarkan bahan yang fleksibel dan mampu menekuk pada saat gerakan;
- modul AI belajar mandiri, yang mampu secara independen menghitung cara terbaik untuk berinteraksi dengan objek yang berbeda dan melakukan berbagai tindakan, dan dalam waktu sesingkat mungkin, menerima data dari kamera 3D dengan persepsi mendalam untuk menganalisis objek dan gerakan.
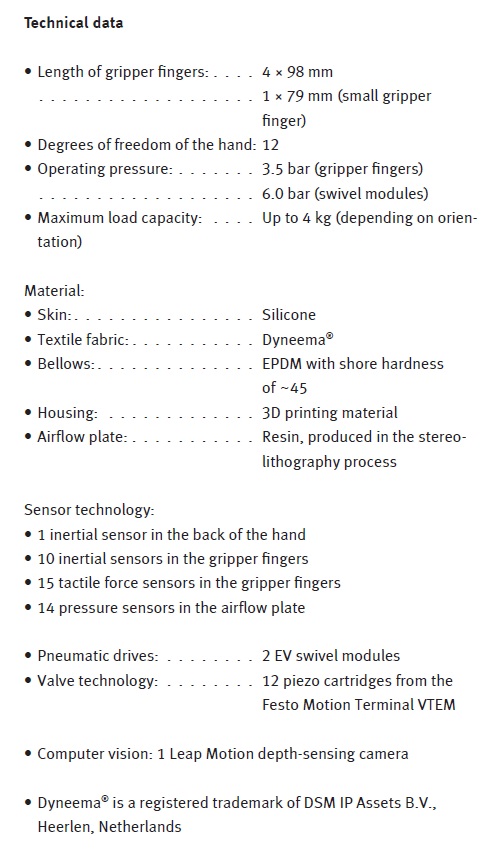
Karakteristik teknis dari komponen perangkat:


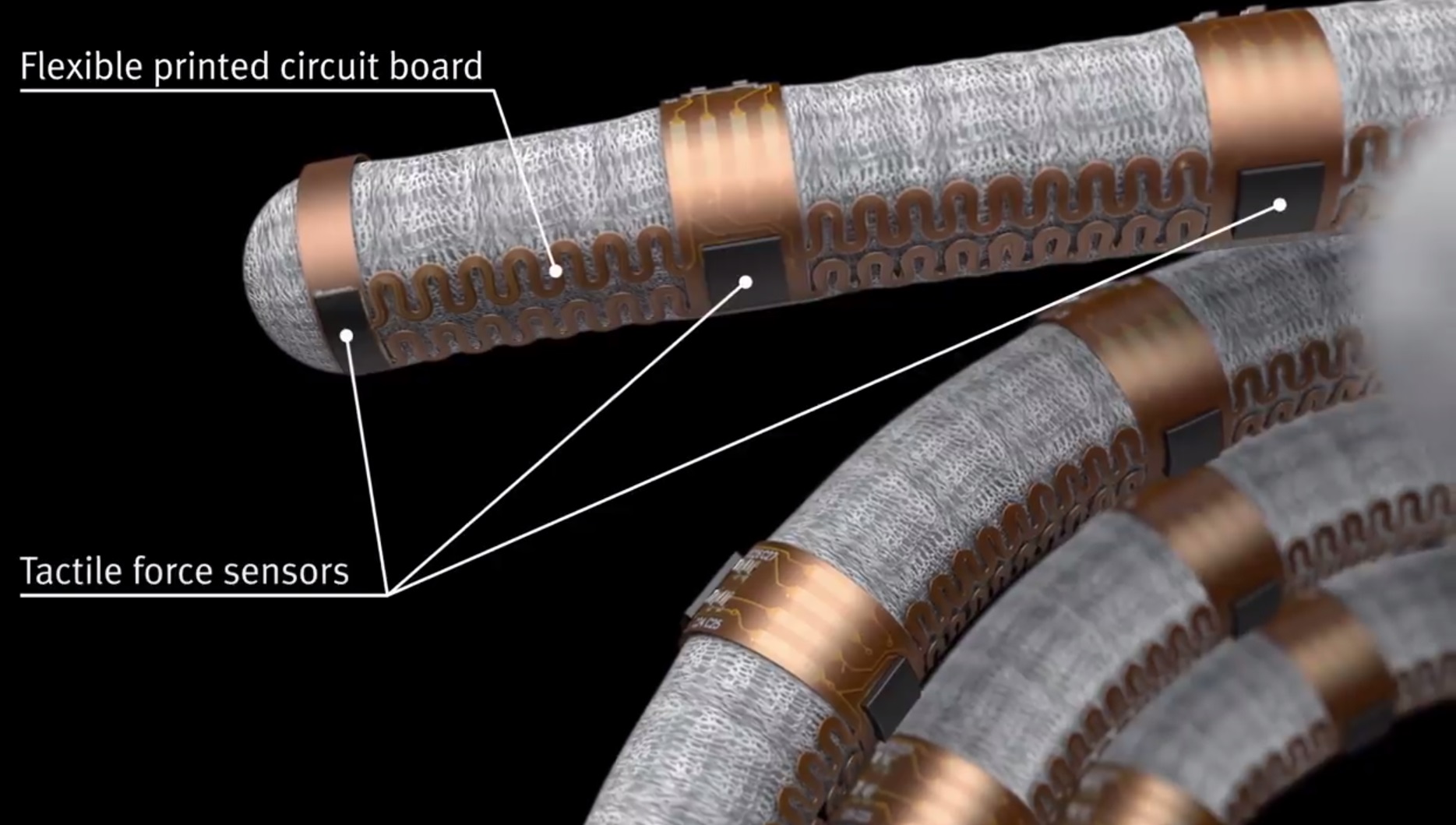





Array sensor sentuh pada jari-jari tangan memberikan umpan balik ke sistem kontrol tangan (dengan komponen AI), melaporkan pergerakan tangan dan jari, serta tentang metode dan gerakan kontak dengan objek yang berbeda, AI yang sama menganalisis informasi tentang apakah itu benar sebuah objek terletak di tangan karena manipulasinya, menggunakan matriks persepsi kontak, meniru indera peraba seseorang. Lebih lanjut, AI menghitung upaya apa yang harus dilakukan untuk memegang subjek, urutan motor apa yang harus dilakukan untuk posisi dan gerakan jari, seberapa lebar untuk membuka telapak tangan, dan sebagainya.

Awalnya, tangan BionicSoftHand tidak diprogram untuk gerakan tertentu, dan AI yang terhubung ke papan kontrolnya dilatih dalam proses melakukan tugas tes menggunakan teknologi pembelajaran paralel, menciptakan dalam lingkungan virtual, seiring waktu memungkinkan lengan robot menjadi hanya "lebih pintar", tetapi untuk solusi masalah baru untuk menggunakan kombinasi gerakan yang telah dipelajari dan diverifikasi dengan tindakan nyata, yang kemudian dioptimalkan untuk tugas-tugas baru.

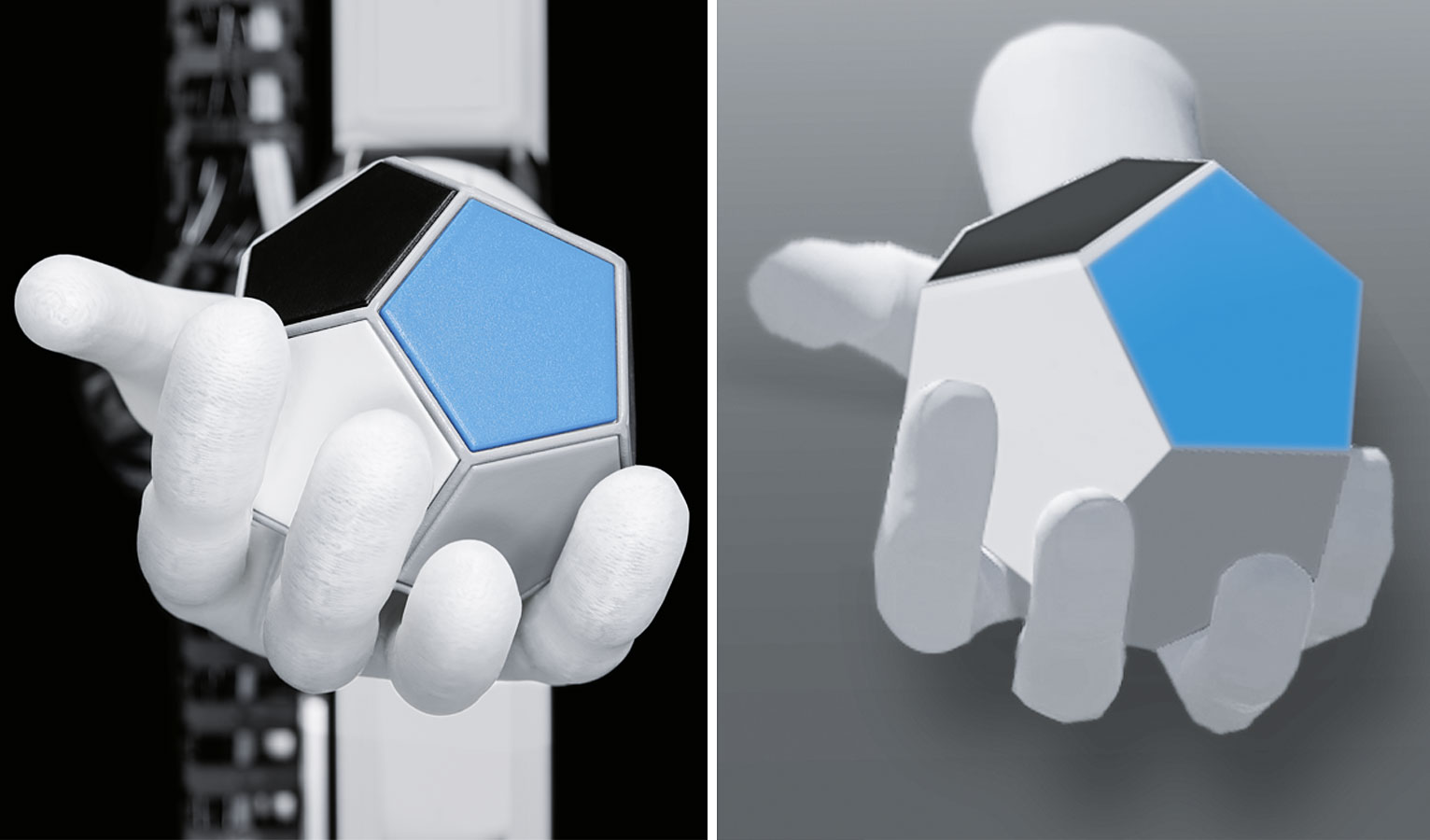

Dalam video demo di bawah ini, AI dengan lengan robot diberi tugas untuk memindahkan objek bersisi 12 yang ditempatkan di tangan sehingga wajah tertentu melihat ke atas, tanpa menjelaskan langkah-langkah untuk menyelesaikan tugas ini.
Pertama, menggunakan kamera 3D dengan persepsi kedalaman, AI membuat salinan digital objek, dan kemudian menempatkannya dalam simulasi virtual dengan banyak tangan virtual yang memanipulasi objek hingga kombinasi yang benar dipilih.
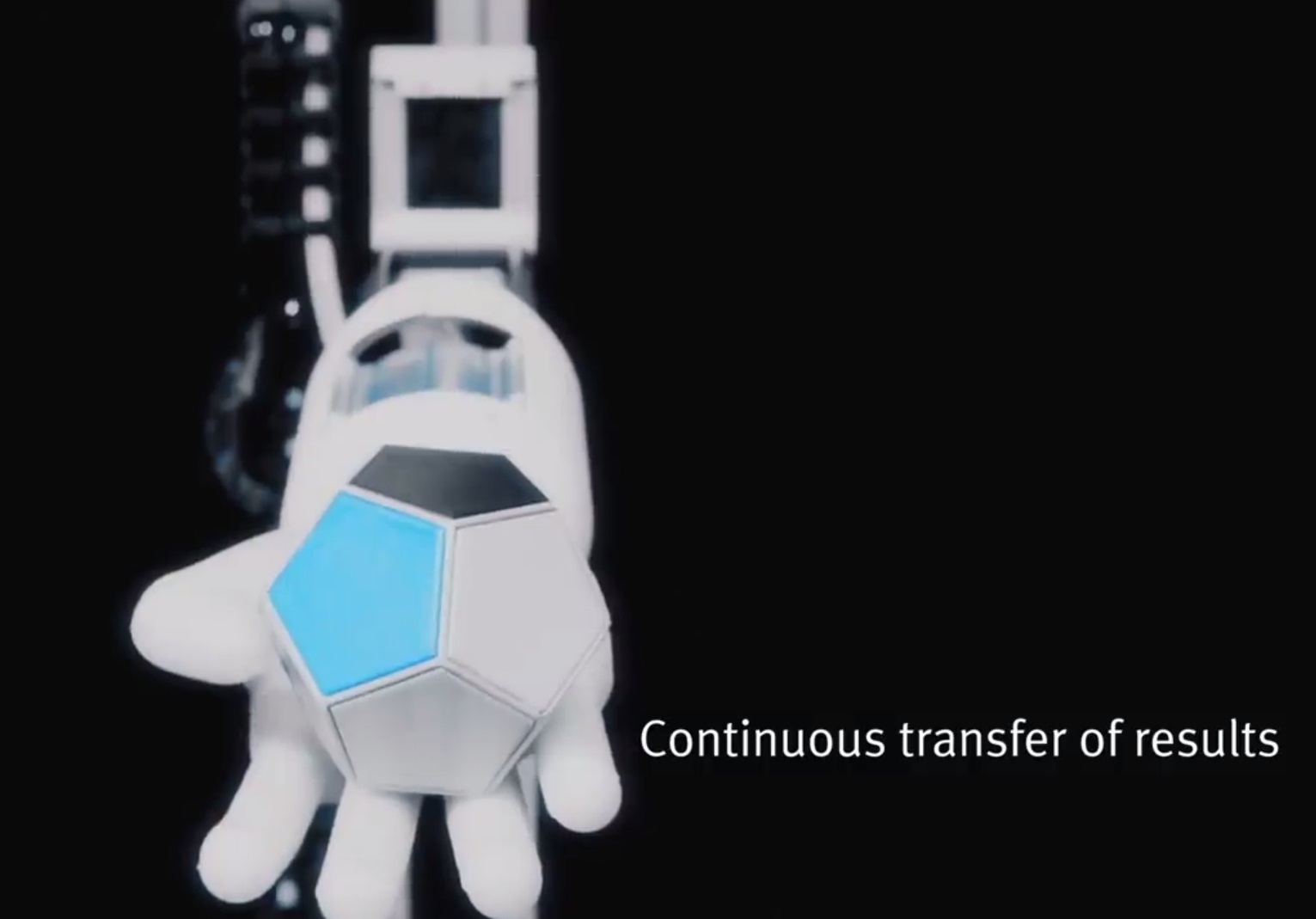
Kemudian AI menghitung pilihan untuk menemukan dan melakukan tindakan optimal yang cepat dengan subjek, dan kemudian melakukannya dalam kenyataan, mengendalikan elemen-elemen BionicSoftHand.
Komponen untuk membuat Elektronik Evgeny Veltistov lebih dekat dan lebih dekat dengan kenyataan.