Untuk memberi manfaat kepada orang, robot perlu belajar cara berjalan seperti yang kita lakukan.

Selama beberapa dekade, robot telah mampu berjalan dengan dua kaki. Saat ini, robot humanoid yang paling canggih dapat berjalan di permukaan yang datar dan miring, memanjat dan menuruni tangga dan melewati medan yang kasar. Beberapa bahkan tahu cara melompat. Namun, terlepas dari kemajuan ini, robot dengan kaki masih tidak dapat dibandingkan dalam hal ketangkasan, efisiensi dan keandalan dengan manusia dan hewan.
Robot berjalan yang ada mengkonsumsi energi dan menghabiskan terlalu banyak waktu untuk pelatihan. Terlalu sering mereka gagal dan pecah. Untuk menjadi asisten robot yang telah lama kita impikan, mesin-mesin ini harus belajar berjalan seperti yang kita lakukan.
Kita pasti perlu membuat robot dengan kaki, karena dunia kita dirancang untuk kaki. Kami melewati kemacetan, kami melewati rintangan, kami naik dan turun tangga. Sulit bagi robot di atas roda atau ulat untuk bergerak di tempat-tempat yang kami sesuaikan untuk tubuh kita.
Dan banyak robot humanoid memiliki kaki yang terlihat seperti milik kita - dengan pinggul, lutut, pergelangan kaki, dan kaki. Tapi di situlah kesamaan berakhir. Jika, misalnya, kita membandingkan gaya dengan mana robot menekan bumi dengan yang sama pada manusia, ternyata sering kali mereka sangat berbeda. Kebanyakan robot humanoid, yang berasal dari contoh awal lengan robot industri, mengendalikan anggota badan sehingga mereka secara akurat bergerak di sepanjang lintasan yang telah ditentukan. Namun, bergerak dengan dua kaki tidak memerlukan kontrol posisi yang lebih banyak daripada kontrol kekuatan, dan menyiratkan berbagai fleksibilitas dan elastisitas - yang dikenal dalam robotika sebagai kepatuhan, yang memungkinkan Anda untuk mengatasi kontak yang tidak terduga.
Banyak kelompok penelitian berusaha membuat robot yang kurang kaku yang dapat bergerak dengan cara yang lebih dinamis dan mirip manusia. Yang paling terkenal di antara proyek-proyek ini mungkin adalah
Atlas dari
Boston Dynamics , humanoid yang mampu berjalan di tanah yang keras dan lunak, melompati batang kayu dan bahkan melakukan backflip. Tetapi sekali lagi, membandingkan pergerakan robot yang paling kompleks dengan hewan, kita melihat bahwa mesin tidak cukup.
Apa yang kita lewatkan? Teknologi bukan masalah terbesar: motor cukup kuat, bahannya cukup kuat, komputer cukup cepat. Keterbatasan, tampaknya, adalah pemahaman kita tentang cara berjalan.
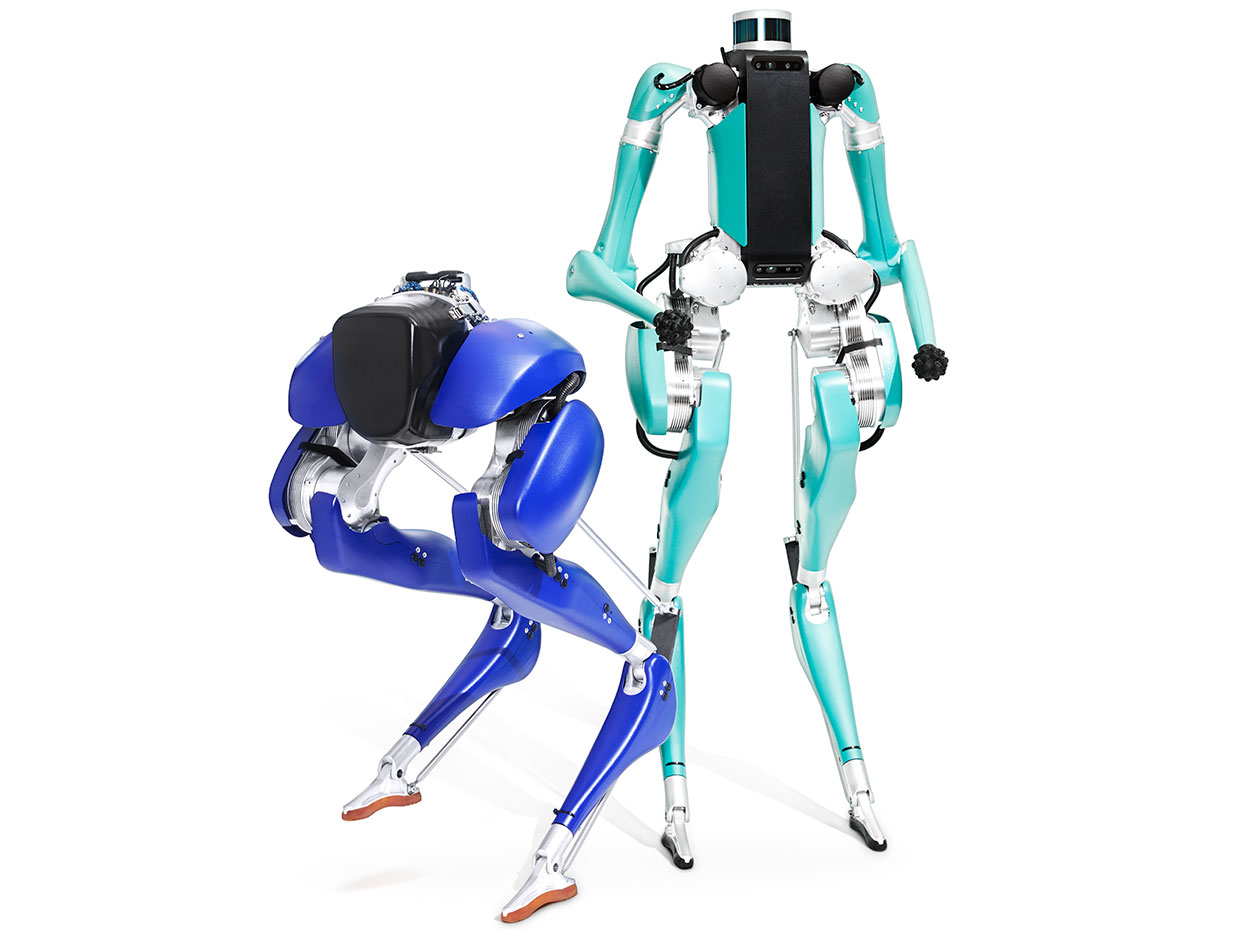 Cassie Robots (kiri) dan Digit dari Agility Robotics
Cassie Robots (kiri) dan Digit dari Agility RoboticsDi Laboratorium Robotika Dinamis Universitas Oregon, saya memimpin tim peneliti yang mencoba mencari tahu prinsip-prinsip dasar berjalan dan menerapkan penemuan ini pada robot. Saya juga merupakan salah satu pendiri dan direktur teknologi
Agility Robotics , sebuah startup di Albany, Oregon, yang mempelajari penggunaan robot berjalan secara komersial. Pada 2017, kami membuka dunia untuk Cassie, platform dua kaki yang kami jual ke beberapa tim peneliti. Segera robot baru kami akan dapat memasuki dunia: Kaki Digit mirip dengan kaki Cassie, tetapi ia memiliki sensor dan sepasang tangan, yang ia gunakan untuk menstabilkan, dan di masa depan untuk manipulasi.
Baik di laboratorium maupun di perusahaan, kami berupaya menciptakan masa depan di mana robot dapat pergi ke mana pun orang bisa. Saya percaya bahwa robot dengan kaki yang dinamis suatu hari nanti akan dapat membantu merawat orang tua di rumah mereka, berpartisipasi dalam operasi penyelamatan jika terjadi kebakaran dan gempa bumi, dan mengirimkan paket ke rumah mereka. Robot kaki juga akan memungkinkan penciptaan exoskeleton dan protesa yang akan membantu meningkatkan mobilitas penyandang cacat. Mereka akhirnya membawa robot fiksi ilmiah menjadi kenyataan.
Beberapa burung berlari lebih baik daripada terbang, atau bahkan tidak terbang sama sekali. Burung unta, kalkun, unggas guinea, dan burung puyuh tidak bisa terbang tinggi seperti elang, tetapi dengan cepat bergerak dengan berjalan kaki. Rekan-rekan saya dari laboratorium dan Monica Daily dari Royal Veterinary College di University of London menghabiskan waktu berjam-jam mengamati burung-burung yang berjalan dan berlari di sekitar laboratorium. Kami ingin memahami bagaimana hewan-hewan ini dapat bergerak dengan gesit dan efisien - namun sebagian besar mesin berbulu ini bekerja pada biji!
Dalam satu percobaan, seekor unggas guinea berjalan di sepanjang jalan, dan kemudian menginjak lubang yang menyamar sebagai selembar serbet. Hewan itu tidak tahu bahwa ia akan memasuki lubang sekitar setengah panjang kakinya, namun, ia tidak tersandung, dan kakinya memanjang dan beradaptasi dengan alur saat berlari. Dalam proses ini, sesuatu yang luar biasa terjadi: otak burung tidak perlu merasakan dan bereaksi terhadap amarah, karena kakinya mengatasinya sendiri.
Ini memberikan ide penting bagi pengembang robot: jika Anda pertama kali membuat robot, dan kemudian memutuskan untuk memprogramnya untuk gerakan lincah, Anda tidak akan berhasil. Seperti halnya dengan unggas guinea, ketangkasan robot sebagian besar akan berasal dari sifat mekanik tubuhnya, dari apa yang disebut robotika dinamika pasif. Dan itu diabaikan di sebagian besar proyek untuk pengembangan robot dengan kaki. Dengan mengembangkan dinamika robot secara hati-hati secara paralel dengan pengisian perangkat lunak, membawanya ke dalam sistem yang terintegrasi, Anda meningkatkan kemungkinan robot mendekati karakteristik hewan.
Perlu dicatat bahwa, meskipun kita mendapatkan inspirasi dari hewan, kita tidak mereproduksi bentuk kaki burung atau konstruksi otot dan tulang di kaki manusia. Kami ingin memahami fisika gerakan hewan dan diturunkan dari itu model matematika abstrak yang dapat dipahami, diverifikasi dalam simulasi komputer, dan diwujudkan dalam robot nyata. Karena ketika membuat robot kita menggunakan logam dan elektronik alih-alih tulang dan otak, mereka bisa sangat berbeda dari hewan, menggunakan fisika yang sama.
Salah satu model matematika paling sederhana menggambarkan titik massa (batang) yang terhubung ke sepasang pegas (kaki) ideal. Model massa pegas ini, tentu saja, disederhanakan; itu menyerupai seorang lelaki kecil dari garis putus-putus dan tidak memperhitungkan keberadaan sendi di kaki, atau fakta bahwa kaki tidak menyentuh tanah pada titik-titik yang terisolasi. Namun, model pegas-massa dapat menghasilkan hasil yang tidak terduga. Dalam simulasi, ia dapat mereproduksi hampir semua jalan yang digunakan orang dan hewan untuk berjalan dan berlari.
 Langkah pertama: kaki-kaki robot ATRIAS bukan manusia, tapi itu adalah mesin pertama yang menunjukkan gaya berjalan mirip manusia
Langkah pertama: kaki-kaki robot ATRIAS bukan manusia, tapi itu adalah mesin pertama yang menunjukkan gaya berjalan mirip manusiaUntuk menguji model massa pegas, kami mengembangkan robot biped
ATRIAS , yang namanya adalah akronim dari asumsi dasar kami:
Asumsikan Robot Adalah Bola [bayangkan bahwa robot itu bola]. Idenya adalah bahwa dinamika pasif robot dapat menciptakan kembali model titik massa dengan pegas seakurat mungkin.
Setiap kaki terbuat dari batang serat karbon ringan yang dirangkai dalam jajar genjang, yang dikenal sebagai empat mata rantai yang diartikulasikan.
Struktur seperti ini meminimalkan massa kaki dan kelembamannya, membawa sistem lebih dekat ke model massa pegas. Kami melengkapi bagian atas kaki dengan pegas fiberglass, secara fisik mewujudkan "pegas" model, memproses tabrakan dengan tanah dan menyimpan energi mekanik.
Pada awalnya, ATRIAS hampir tidak bisa berdiri, dan kami mendukungnya dengan tali pengikat. Tetapi kami meningkatkan pengontrol yang melacak kecepatan dan kemiringan tubuh, dan robot pertama-tama mulai mengambil langkah pertama, dan kemudian dengan bebas berjalan di sekitar laboratorium. Kemudian ATRIAS belajar untuk pulih dari gangguan - dalam satu percobaan, murid-murid saya melemparkan bola kepadanya. Kami juga membawa ATRIAS ke lapangan sepak bola universitas, mempercepatnya hingga kecepatan maksimum 7,6 km / jam, dan kemudian dengan cepat berhenti.
Untuk lebih memahami apa yang dilakukan robot, bayangkan bahwa Anda ditutup matanya, Anda berjalan di atas panggung, dan tubuh Anda terbungkus karpet, dan Anda tidak dapat menggunakan tangan Anda untuk menyeimbangkan. Anda hanya dapat melangkah lebih jauh - inilah yang ATRIAS lakukan. Dia bahkan bisa mengatasi rintangan, misalnya, dengan sekelompok kayu bakar di jalan.
Dan, meskipun ketangkasan adalah komponen penting, itu juga sangat penting untuk menghemat energi. Kami mengkonfirmasi efektivitas biaya robot dengan mengukur parameter yang dikenal sebagai biaya transportasi [COT]. Ini didefinisikan sebagai rasio konsumsi energi (daya) terhadap produk berat dan kecepatan, dan digunakan untuk membandingkan efisiensi energi hewan dan mesin yang bergerak. Semakin rendah COT, semakin baik. Pada orang yang berjalan, SOT adalah 0,2, dan dalam robot humanoid biasa, angka ini jauh lebih tinggi - dari 2 menjadi 3, menurut
beberapa perkiraan . Eksperimen kami
menunjukkan bahwa dalam ATRIAS dalam mode berjalan, COT adalah 1,13, yang menunjukkan
efektivitas robot dinamis. Dan pada kenyataannya, ditenagai oleh beberapa baterai lithium-polimer - seperti yang digunakan pada mobil yang dikendalikan radio - ATRIAS dapat bekerja selama sekitar satu jam.
Kami juga
mengukur kekuatan yang ditekan robot di tanah. Kami menempatkan ATRIAS dengan berat 72,5 kg (sekitar ukuran rata-rata orang) di platform daya - alat ini sering digunakan dalam kedokteran olahraga untuk mengukur gaya berjalan seseorang melalui mengukur kekuatan reaksi. Saat berjalan robot, kami merekam data tentang pasukan. Kemudian salah satu siswa saya menggantikan ATRIAS, dan kami mencatat langkahnya. Setelah membangun grafik ketergantungan reaksi dukungan dalam waktu, kami melihat bahwa itu persis bertepatan dengan grafik robot. Sejauh yang kita tahu, ini adalah implementasi paling realistis dari dinamika kiprah robot manusia saat ini.
Hasilnya menegaskan bahwa sistem pegas-massa dinamis sederhana dapat diimplementasikan dalam robot. Ini memiliki banyak sifat yang berguna, seperti efisiensi, keandalan dan fleksibilitas, dan sampai ke ujung jalan. Saatnya membuat robot berikutnya.
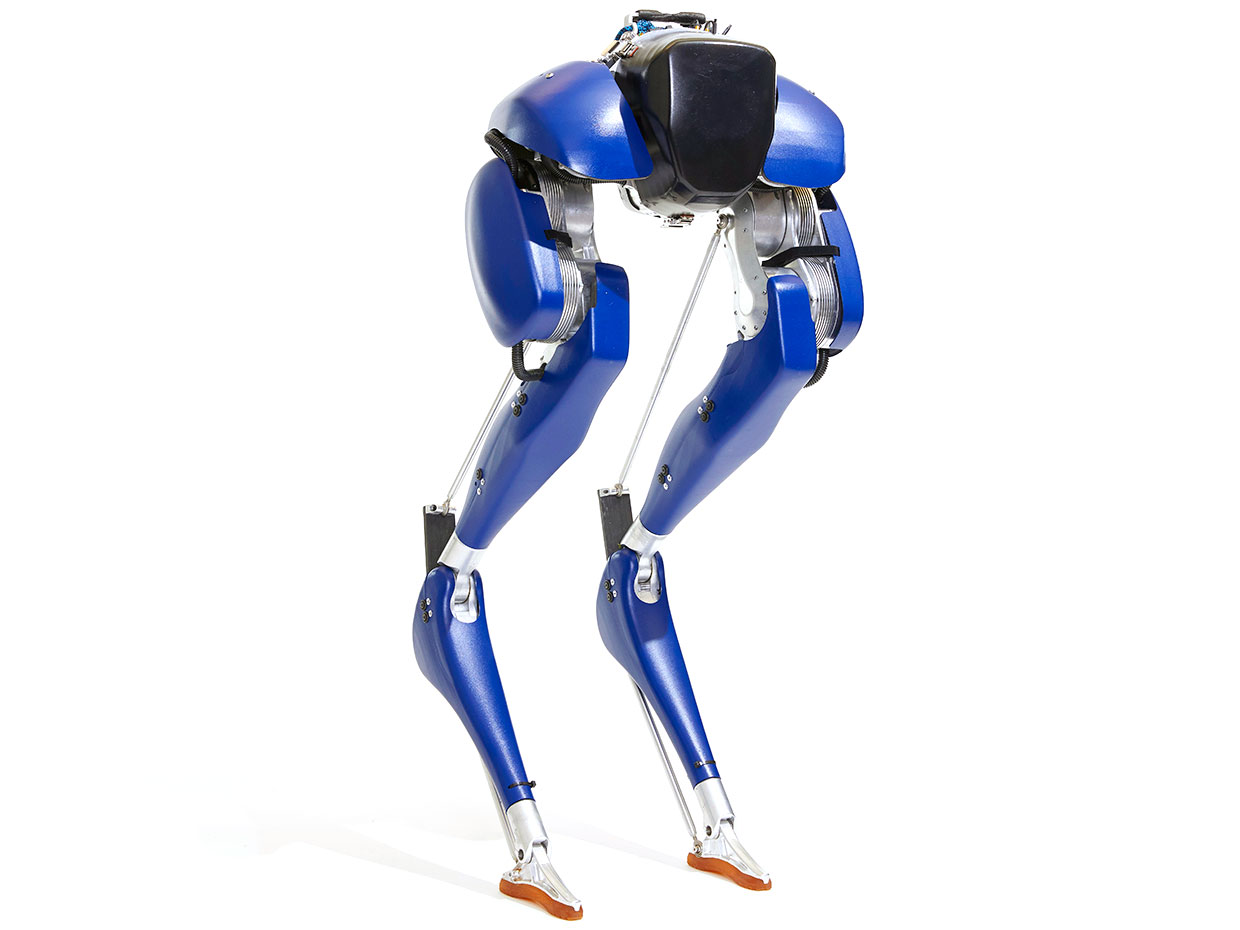 Cassie menggunakan lima motor dan dua pegas di setiap kaki untuk bergerak di sekitar medan yang sulit.
Cassie menggunakan lima motor dan dua pegas di setiap kaki untuk bergerak di sekitar medan yang sulit.Cassie, seperti ATRIAS, adalah robot berjalan yang dinamis. Kami telah mengoptimalkan semua aspek desainnya untuk membuat robot yang andal dan mampu, cocok untuk komersialisasi. Dan kami mengatur standar: kami ingin Cassie dapat berlari melalui hutan, berjalan di atas medan yang kasar dan bekerja selama beberapa jam dengan daya baterai tanpa suspensi pendukung.
Cassie dibangun pada konsep yang sama yang digunakan untuk ATRIAS, tetapi kami memutuskan untuk membuat kakinya yang baru. Sebelumnya, kami menggunakan dua motor untuk memberi daya pada masing-masing empat mata rantai pada setiap kaki. Skema seperti itu meminimalkan massa mereka, tetapi ada kelemahannya: saat berjalan, satu motor memperlambat yang lain, yang menyebabkan hilangnya energi. Saat mengerjakan Cassie, kami
mempelajari konfigurasi kaki lainnya untuk menghilangkan efek ini. Skema baru memungkinkan Anda untuk membuat motor lebih kecil, dan robot menjadi lebih efisien daripada ATRIAS.
Penting untuk dicatat bahwa konfigurasi kaki Cassie adalah hasil analisis ini. Fakta bahwa kaki menyerupai kaki burung unta atau
theropoda lain mungkin mengindikasikan bahwa kita berada di jalur yang benar, tetapi kita tidak berusaha membuat robot yang, setelah ditutup dengan bulu-bulu burung itu, dapat tersesat dalam sekawanan emu.
Setiap kaki Cassie memiliki lima sumbu gerakan - atau derajat kebebasan, berbicara dengan cara robot - dan masing-masing memiliki motorik sendiri. Pinggul memiliki tiga derajat kebebasan, seperti milik kita, yang memungkinkan kaki berputar ke segala arah. Dua motor lain memiliki as roda di lutut dan kaki. Cassie memiliki derajat kebebasan ekstra di tungkai bawah dan pergelangan kaki; mereka pasif, dan tidak dikendalikan oleh motor, tetapi melekat pada pegas, yang memungkinkan robot untuk bergerak melalui medan yang sulit, tidak tunduk pada humanoids kaki datar.
Kaki baru Cassie membutuhkan penciptaan pengendali tingkat rendah yang lebih canggih daripada ATRIAS. ATRIAS merentangkan kakinya, cukup menerapkan kekuatan yang sama dan berlawanan dengan arah torsi dari kedua motor. Dengan Cassie, menggerakkan kaki ke arah tertentu memerlukan menghitung torsi yang berbeda untuk motor yang berbeda. Untuk melakukan ini, pengontrol harus memperhitungkan inersia kaki dan dinamika motor dan gearbox.
 Controller Cassie menggunakan langkah-langkah terencana dan penyeimbangan dinamis
Controller Cassie menggunakan langkah-langkah terencana dan penyeimbangan dinamisYa, tugas pengontrol menjadi lebih sulit, tetapi metode ini memungkinkan Anda berjalan lebih efisien dan menggunakan perilaku yang lebih luas. Cassie dapat berjalan dengan kecepatan hingga 5 km / jam menggunakan salah satu pengendali pertama. Konsumsi daya bervariasi dari 100 watt (berdiri) hingga 300 watt (dalam gerakan), dan pada baterai lithium-ion, dapat berjalan selama 5 jam. Juga, kaki-kaki baru memungkinkan Cassia untuk bermanuver dengan cara yang tidak bisa dilakukan ATRIAS. Dan berkat motor di sendi kaki, ia dapat berdiri tanpa harus terus bergerak, seperti yang dilakukan ATRIAS.
Cassie juga memiliki berat hanya 31 kg, dua kali lebih sedikit dari ATRIAS. Dua Cassie dapat dimuat ke bagasi mobil dalam waktu kurang dari satu menit. Ini juga lebih dapat diandalkan: bagian-bagiannya terbuat dari aluminium dan serat karbon, dan kasing pelindung terbuat dari plastik-polivinil klorida plastik tahan lama, melindunginya dari benturan dan jatuh.
Sejauh ini, Cassie tidak tahu cara berlari menembus hutan. Tetapi kami membawanya keluar tanpa asuransi, dan dia berjalan di tanah, rumput dan daun-daun yang jatuh. Sekarang kita sedang mempelajari masalah mengintegrasikan perilaku dinamis dari robot dengan
perencanaan gerak , yang memungkinkannya, misalnya, untuk naik tangga. Kami juga sedang mengerjakan fitur lain yang akan membuat robot tipe Cassie lebih berguna: tangan.
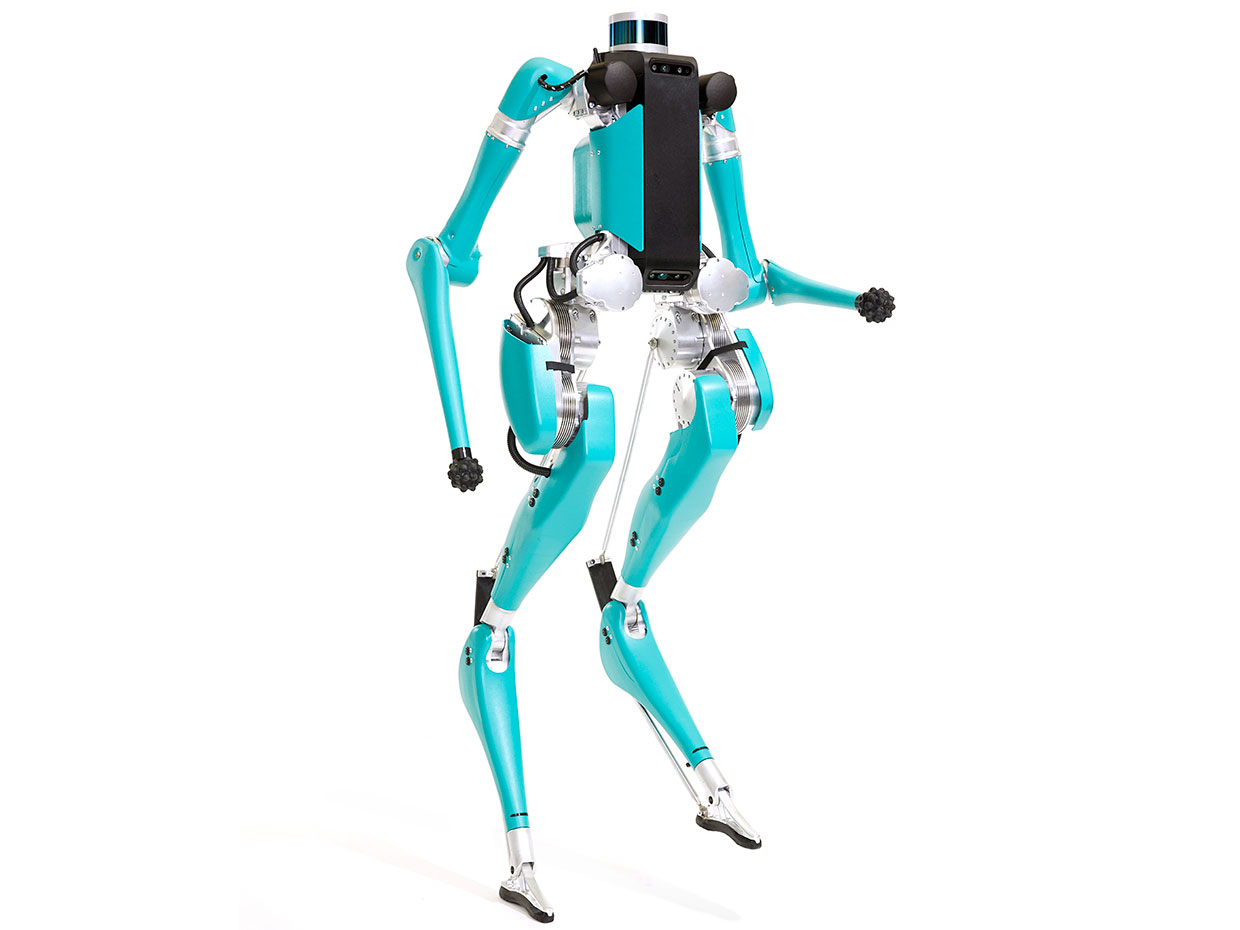 Digit memiliki kaki, seperti Cassie, tetapi ia juga memiliki tubuh dengan sensor di dalam dan sepasang tangan yang membantunya dengan mobilitas dan keseimbangan.
Digit memiliki kaki, seperti Cassie, tetapi ia juga memiliki tubuh dengan sensor di dalam dan sepasang tangan yang membantunya dengan mobilitas dan keseimbangan.Digit adalah keturunan langsung Cassie. Dia memiliki kaki yang serupa, tetapi kami menambahkan batang tubuh dengan sensor di dalam dan sepasang tangan. Mereka secara khusus dibuat untuk membantunya dengan mobilitas dan keseimbangan, dan ayunan sesuai dengan gaya berjalan. Mereka juga memungkinkan Digit untuk menopang dirinya sendiri di musim gugur dan mengarahkan kembali tubuhnya untuk berdiri.
Digit memiliki sesuatu yang tidak dimiliki Cassie: persepsi bawaan. Kami menambahkan banyak sensor untuk itu, termasuk LIDAR di tubuh bagian atas. Sensor membantunya mengumpulkan data, yang memungkinkan robot untuk bergerak di dunia yang penuh rintangan, misalnya, di kamar dan tangga yang berantakan, dan mengandalkan dinamika stabil hanya dalam situasi yang tidak terduga dan dengan kesalahan sensor.
Digit, dan robot dengan kaki yang mengejarnya, harus banyak belajar. Tetapi kami yakin bahwa mereka akan mengubah dunia. Pengaruh mereka dapat dibandingkan dengan mobil dalam hal mengubah gaya hidup orang, pola lalu lintas dan skema perkotaan, di mana robot ini berjanji untuk mengubah logistik dan pengiriman paket.
Dalam waktu dekat, ketika akan ada robomobiles, produsen mobil dan perusahaan yang menyediakan perjalanan bersama seperti Lyft dan Uber akan memiliki armada besar mobil sendiri yang membawa orang, dan lalu lintas maksimum akan berada di jam sibuk, seperti hari ini. Tapi apa yang akan dilakukan mobil-mobil ini di malam hari dan di tengah hari? Mereka mungkin tidak menganggur, tetapi mengangkut paket dari gudang otomatis ke pintu Anda. Namun, mobil-mobil ini hanya akan bisa sampai di trotoar - cukup sulit untuk mengirimkan parsel ke pintu tanpa seseorang. Dan kemudian robot berjalan ikut bermain. Mereka akan mengendarai mobil seperti itu dan berjalan beberapa meter terakhir. Dan meskipun roda dan sayap dapat memainkan beberapa peran ini, di dunia yang dirancang untuk dua kaki, tidak ada platform lain untuk gerakan yang akan sefleksibel robot pada kakinya.
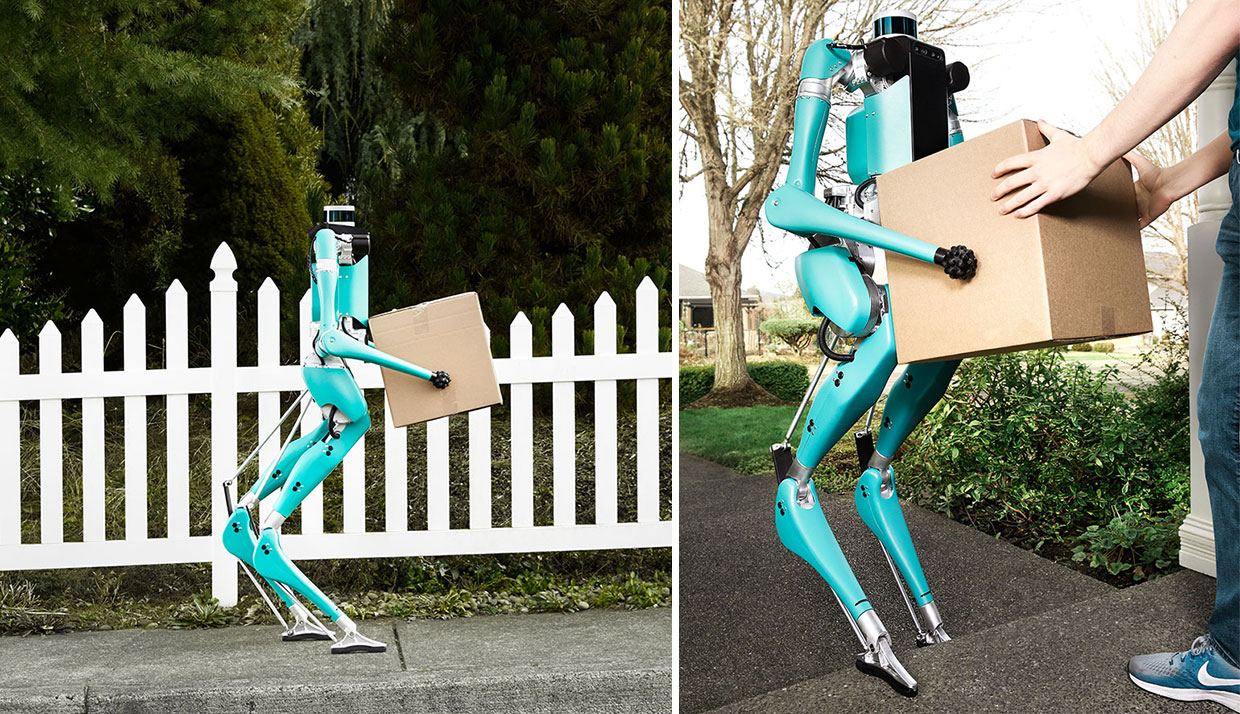 Digit belajar berjalan di medan yang berbeda dan menaiki tangga, sehingga suatu hari ia dapat mengirimkan paket langsung ke pintu
Digit belajar berjalan di medan yang berbeda dan menaiki tangga, sehingga suatu hari ia dapat mengirimkan paket langsung ke pintuRobot pengiriman akan menjadi bagian dari sistem logistik yang semakin otomatis, di mana paket dari pabrikan segera dikirim ke pintu Anda. Sistem ini akan mengurangi biaya pengiriman sehingga pengiriman paket akan lebih murah daripada membelinya di gudang besar, penerangan yang baik, dengan akses manusia. Toko grosir kecil akan menjadi tidak perlu. Orang, tentu saja, akan dapat menikmati berbelanja untuk beberapa hal. Tetapi produk harian akan dikirimkan oleh robot, menghemat waktu dan uang Anda.
Robot Biped akan dapat menembus rumah dan kantor kami. Mereka dapat berjalan di lantai atas dan di kamar yang penuh sesak, berinteraksi dengan orang-orang pada tingkat mata yang aman dan pada skala manusia, yang akan memungkinkan kita untuk menua secara memadai di rumah kita. Mereka akan membantu untuk membawa barang-barang dan akan berfungsi sebagai perangkat kehadiran jarak jauh, yang akan memungkinkan anggota keluarga dan teman-teman untuk menggunakan robot untuk berkomunikasi dengan orang-orang dari jarak jauh dan menemani mereka.
Robot di kaki mereka akan bisa sampai ke tempat orang berbahaya. Mereka akan terjun payung ke dalam kebakaran hutan untuk mengumpulkan data waktu nyata, berlari ke gedung-gedung yang terbakar untuk mencari penduduk, dan memasuki daerah bencana seperti pembangkit listrik tenaga nuklir Fukushima, menjelajahi daerah-daerah yang sulit dijangkau. Mereka akan secara teratur memeriksa interior pembangkit listrik tenaga air dan tambang yang ditinggalkan sehingga kita tidak perlu melakukannya.
Untuk masuk ke masa depan ini, kita perlu menyelesaikan banyak masalah. Tetapi saya yakin bahwa komunitas robot dapat membuat teknologi ini praktis. Ini akan menjadi satu langkah kecil untuk robot dan lompatan besar bagi seluruh umat manusia.