Bagaimana waktu berlalu! Bulan bumi keempat bekerja di sisi jauh bulan modul pendaratan Chang'e-4 dan penjelajah Yutu-2 telah tiba. Perangkat selamat dari periode suhu yang sangat rendah pada malam bulan ketiga, sekarang mereka telah keluar dari mode tidur dan telah memulai studi baru dari permukaan bulan dan luar angkasa.
Kamera apa yang dipasang pada modul Chang'e-4 dan penjelajah Yutu-2, dan apa yang dilakukan kamera pada hari-hari bulan yang panjang?
Materi yang diterbitkan sebelumnya tentang misi Chang'e-4: Saat ini, 88 hari (2212 jam) telah berlalu sejak pendaratan bajak Yutu-2 di permukaan Bulan dan 115 hari (2760 jam) setelah peluncuran bajak Yutu-2 dari kosmodrom Sichan sebagai bagian dari misi Chang'e-4 ke Bulan.
Hari lunar keempat di sisi jauh bulan:
Durasi modul pendaratan yang direncanakan adalah satu tahun, penjelajah - tiga bulan.
Bahkan, bajak Yutu-2 telah mencapai perkiraan masa kerja 2160 jam.
Ini bukan catatan untuk misi bulan Chang'e, pendarat Chang'e-3 pertama, yang telah terlihat di Bulan sejak Desember 2013, masih menunjukkan tanda-tanda kehidupan (telemetri dan data dari berbagai instrumen), tetapi mitranya pendaratan - penjelajah Yut pertama, meskipun kehilangan mobilitas 40 hari setelah dimulainya pekerjaan produktif di permukaan bulan, hingga pertengahan 2016 itu mentransfer data ke MCC dalam mode diam.
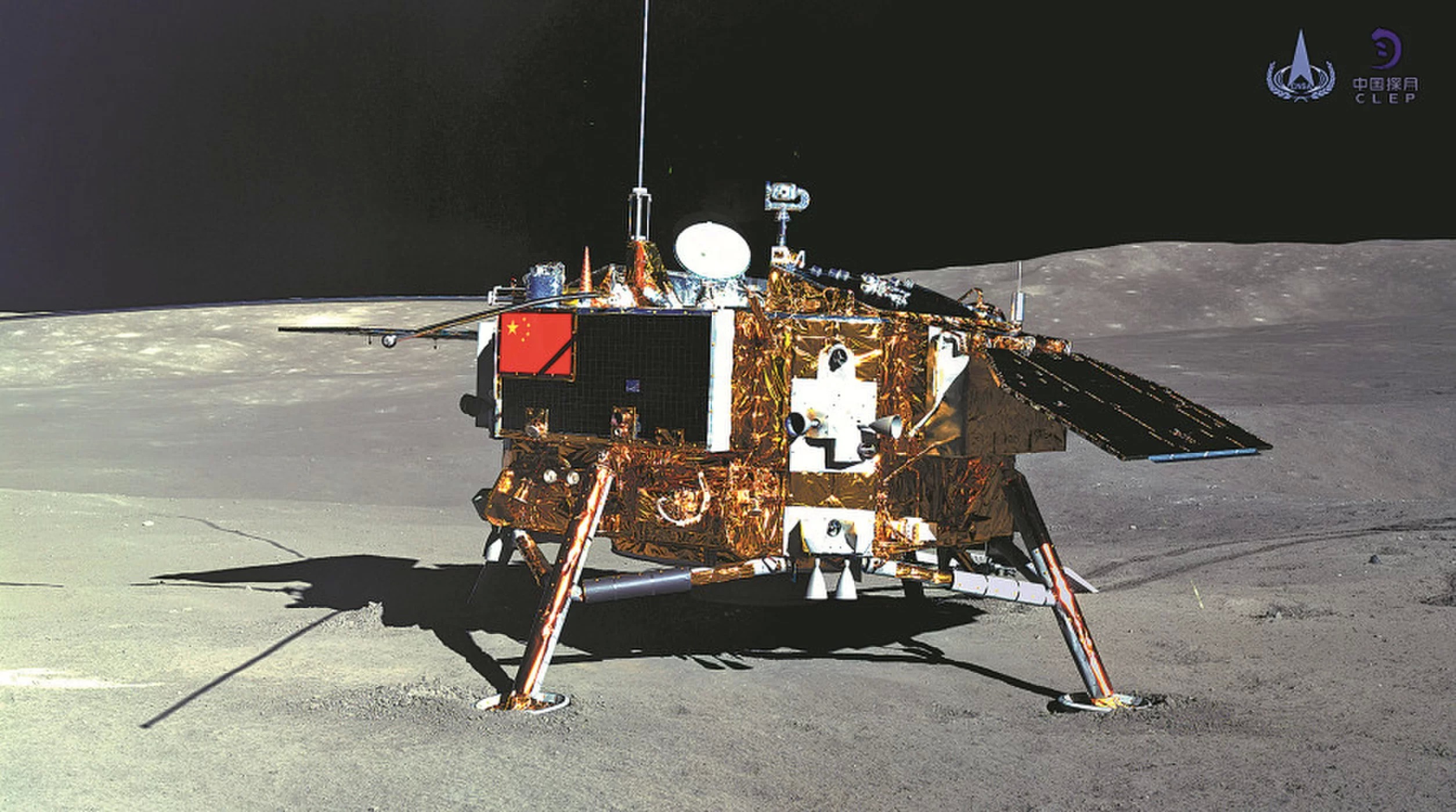
Data pada modul misi bulan "Chang'e-4":- Modul turunan "Chang'e-4" (4,4 meter antara dukungan pendaratan yang berlawanan, berat 1200 kg.);
- Yutu-2 rover (tinggi 1 meter, lebar 1 meter (tanpa panel surya), panjang 1,5 meter, dua panel surya lipat, enam roda, berat 140 kg.).
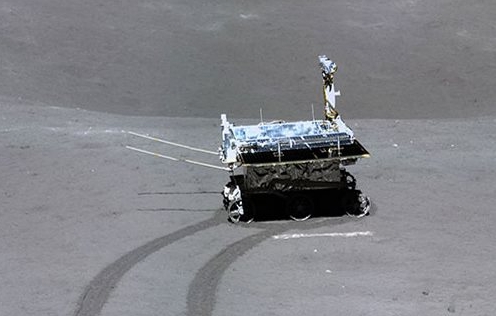
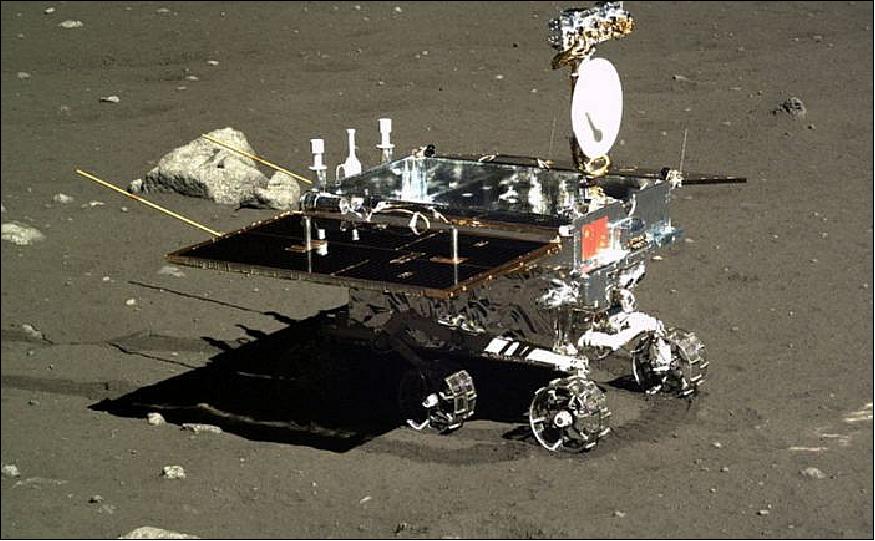 Foto baru dari belakang bulan
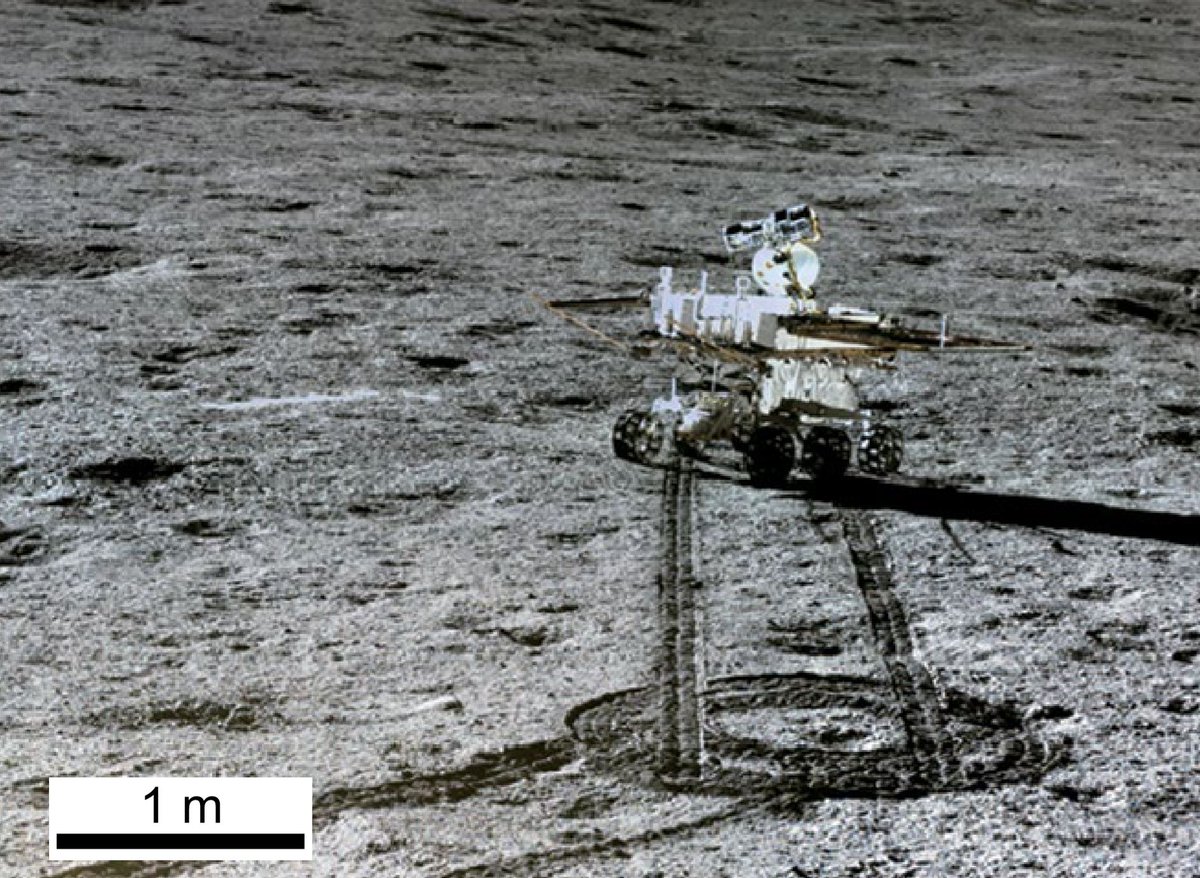
Foto baru dari belakang bulanJejak bulan dari roda rover Yutu-2 dan bayangan dari antena dan platform dengan kamera panorama:

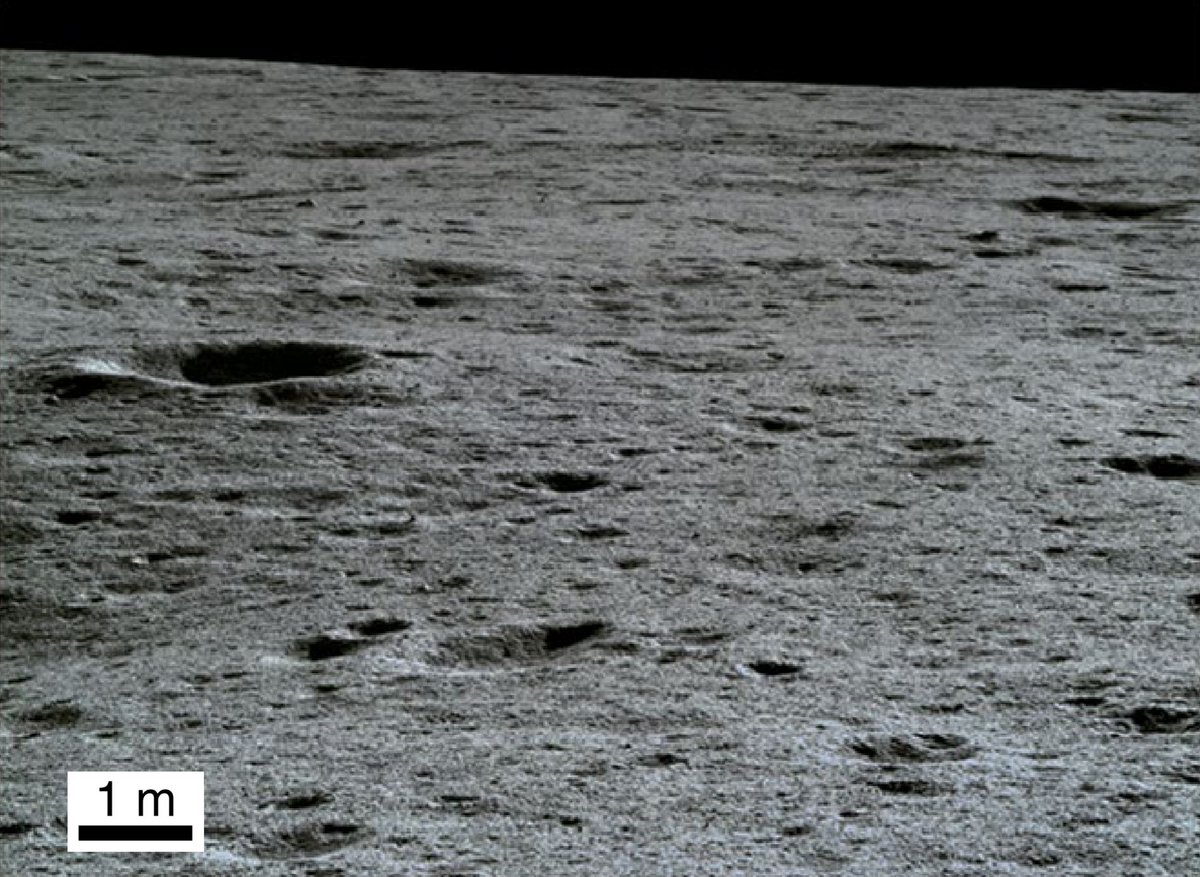
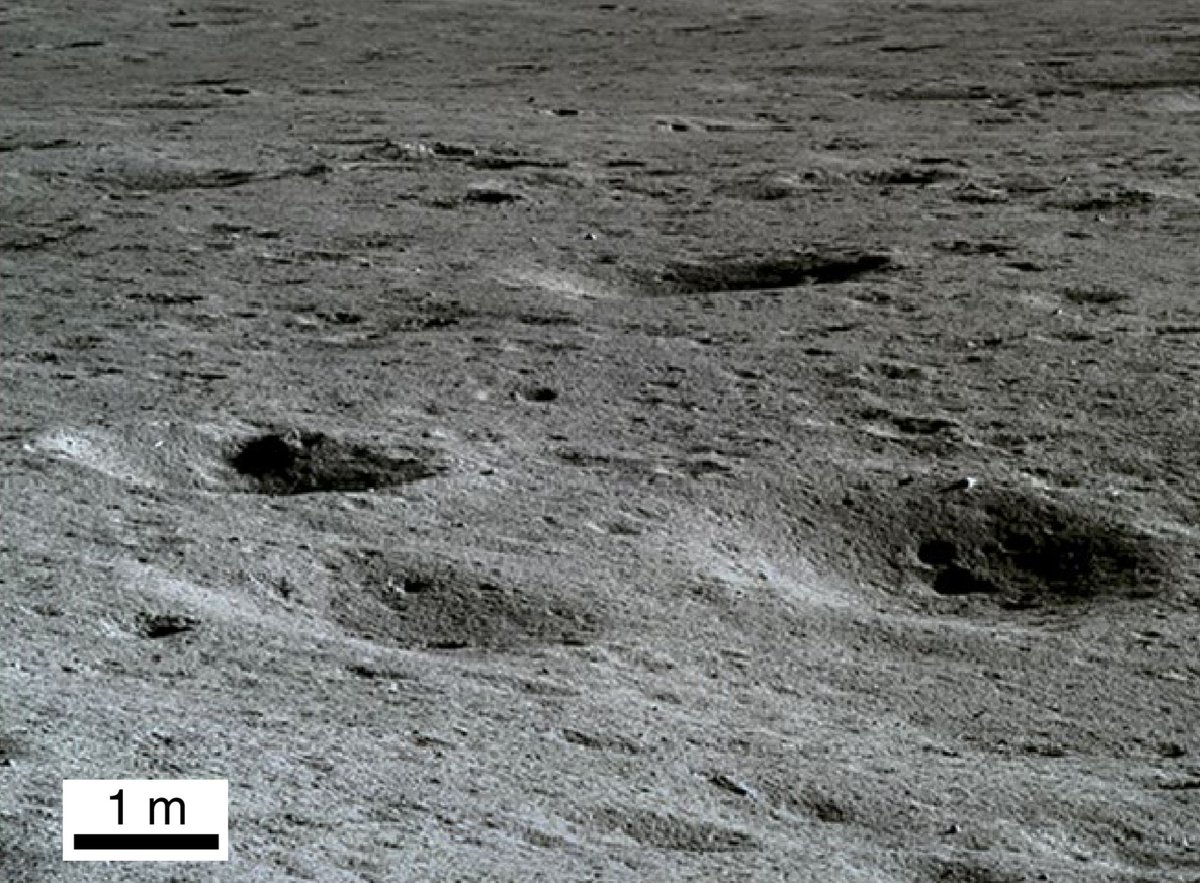
Beberapa kawah (dengan bayangan indah) dan gunung di latar belakang:

Dan ini adalah foto-foto dari artikel ilmiah "Lunar farside yang akan dieksplorasi oleh Chang'e-4" edisi April Nature Geoscience.

Kawah kecil dekat lokasi pendaratan:
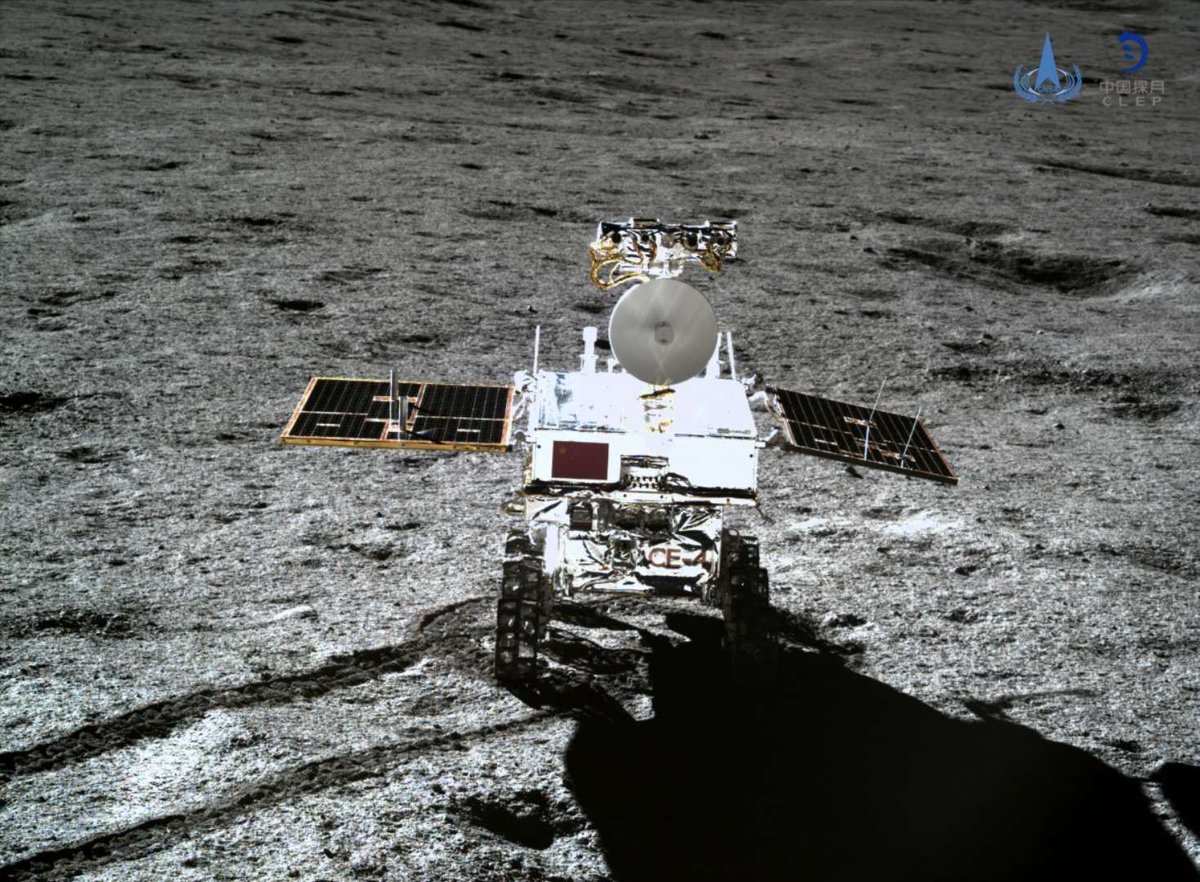
Rover "Yutu-2" menjelajahi permukaan bulan:
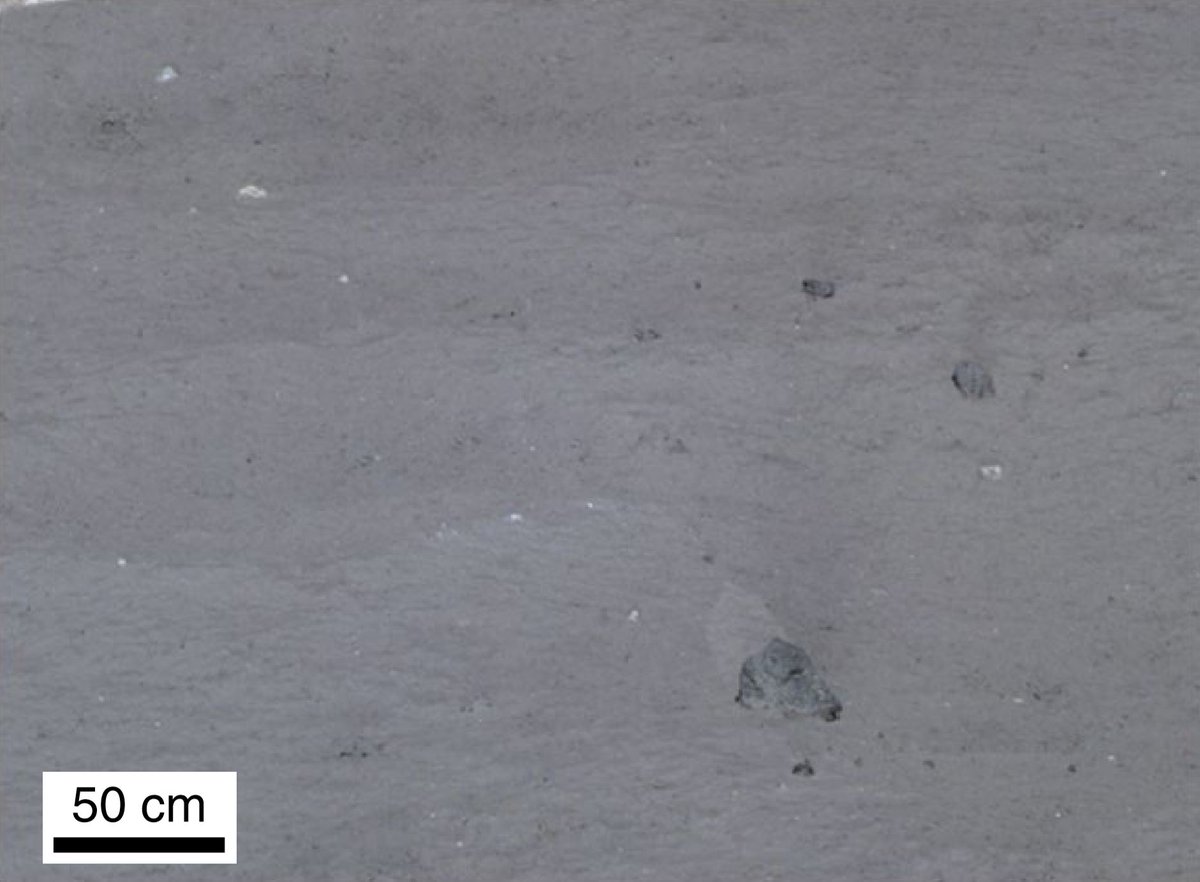
Fragmen batu di kawah kecil (foto dari penjelajah Yutu-2):
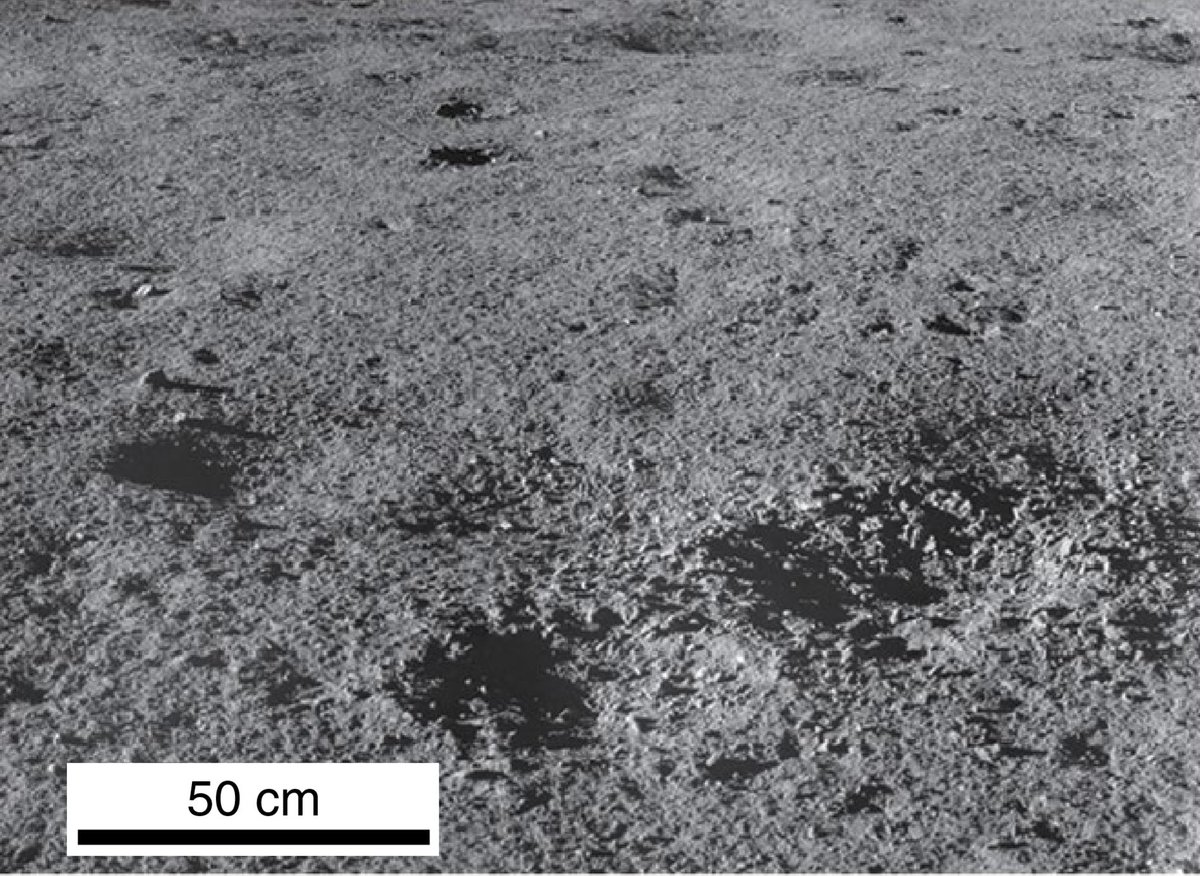
Batu-batu kecil di sepanjang bajak Yutu-2:

Batu gelap yang sangat tidak biasa di dekat lokasi pendaratan:
 Kamera apa yang dipasang pada modul Chang'e-4 dan rover Yutu-2?Dua kamera diinstal pada modul pendaratan Chang'e-4:
Kamera apa yang dipasang pada modul Chang'e-4 dan rover Yutu-2?Dua kamera diinstal pada modul pendaratan Chang'e-4:
- Kamera pendaratan (Kamera pendaratan - LCAM);
- kamera lansekap (Kamera medan - TCAM).Kamera pendaratan LCAM (0,5 kg, ukuran 116x100x70,4 mm) dipasang di bagian bawah modul Chang'e-4, dihidupkan secara otomatis pada ketinggian 12 km di atas permukaan bulan untuk merekam prosedur pendaratan dengan resolusi 1024x1024 piksel, 10 frame per detik.
Video prosedur pendaratan dari kamera LCAM - beberapa ribu frame dikumpulkan dalam satu video
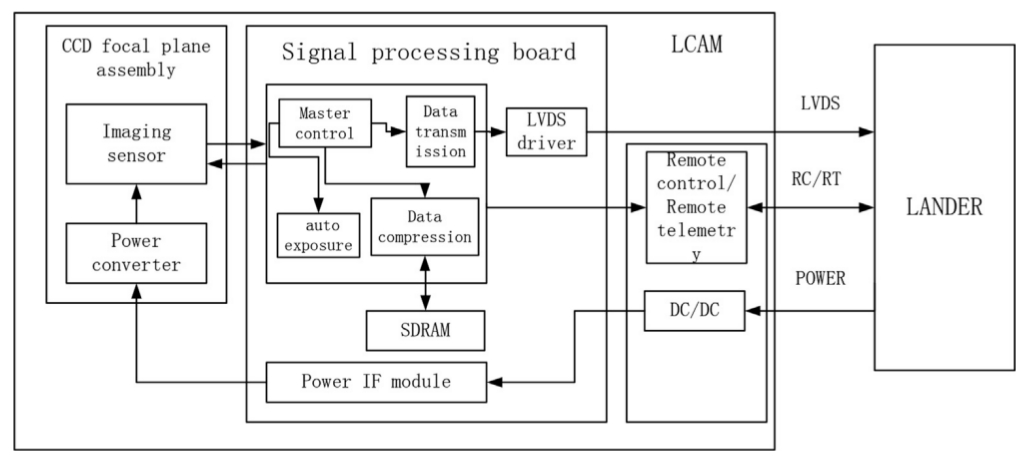
Fitur LCAM Landing Chamber:
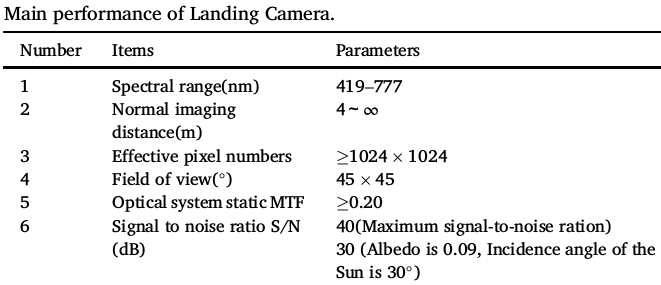
Diagram sirkuit elemen-elemen ruang pendaratan LCAM:
Data ditransmisikan menggunakan antarmuka LVDS (Low Voltage Differential Signaling).
Setelah mendarat di bulan, kamera LCAM hanya menangkap frame yang sama dengan dukungan pendaratan:

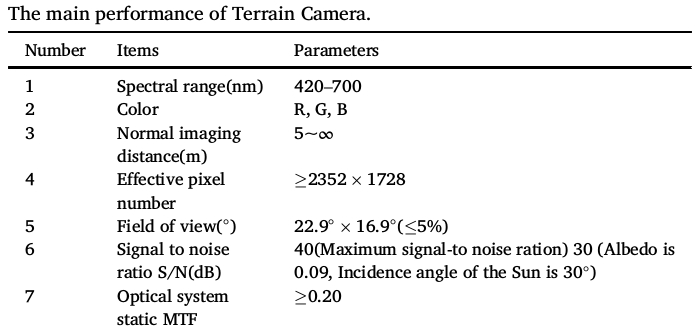
Kamera lansekap TCAM (0,64 kg, ukuran 92x105x118,9 mm) dipasang di titik tertinggi modul pendaratan Chang'e-4 pada braket khusus yang memungkinkan kamera memutar 360 derajat di sekitar porosnya dan dapat memiringkan kamera ke atas atau ke bawah hingga sudut hingga 120. derajat. Foto-foto panorama permukaan dan elemen-elemen modul pendaratan, melacak penjelajah dan menjelajahi area di sekitar zona pendaratan adalah fungsi-fungsi TCAM.
Fitur kamera lanskap TCAM:
Skema komunikasi dari elemen-elemen kamera lanskap TCAM:
Panorama situs pendaratan:

Kamera LCAM dan TCAM pada modul landing:

Modul pendaratan Chang'e-4 bekerja dalam mode stasioner dan foto permukaannya di zona pendaratan pertama-tama sangat penting untuk memahami jenis permukaan apa yang sebenarnya ada di sekitar modul. Bagaimanapun, ada sejumlah besar kawah kecil dan batu, dan mereka dapat mengganggu (dalam kasus terburuk) dengan prosedur untuk menurunkan bajak. Sejak setelah mendarat, modul Chang'e-4 tidak dapat mengubah posisinya dan membuat "lompatan" ke zona lain yang lebih nyaman untuk pendaratan.
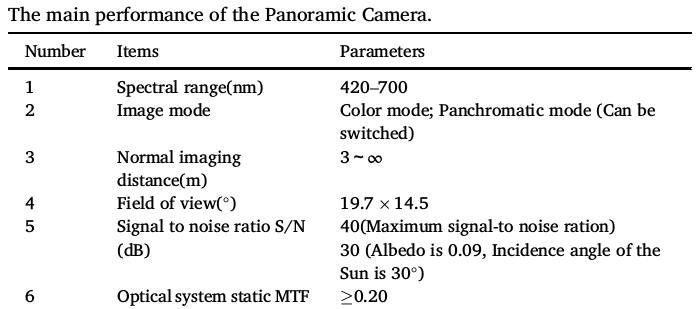
Rover Yutu-2 memiliki kamera panorama ganda (kamera panorama - PCAM).Kamera PCAM panoramik (0,69 kg, ukuran 90x110x120 mm) dipasang pada titik tertinggi rover Yutu-2 pada braket tiang lebar khusus, yang memungkinkan kamera memutar 360 derajat di sekitar porosnya untuk mengambil foto pemandangan panorama permukaan.
Karena kamera terdiri dari dua modul yang identik, mereka digunakan untuk menyusun gambar 3D menggunakan metode pencitraan stereo binokular. Untuk mendapatkan gambar warna dalam kamera PCAM, digunakan filter Bayer (array filter warna).
Fitur kamera PCAM panorama:
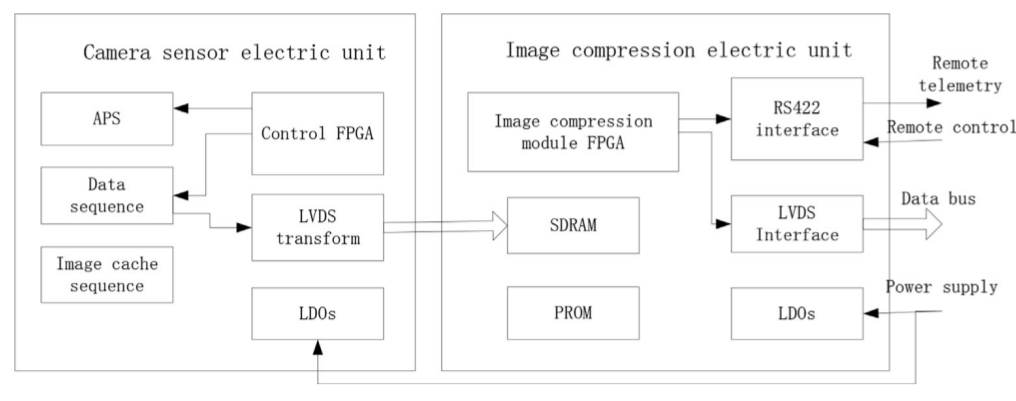
Skema komunikasi dari elemen-elemen kamera PCAM panorama:

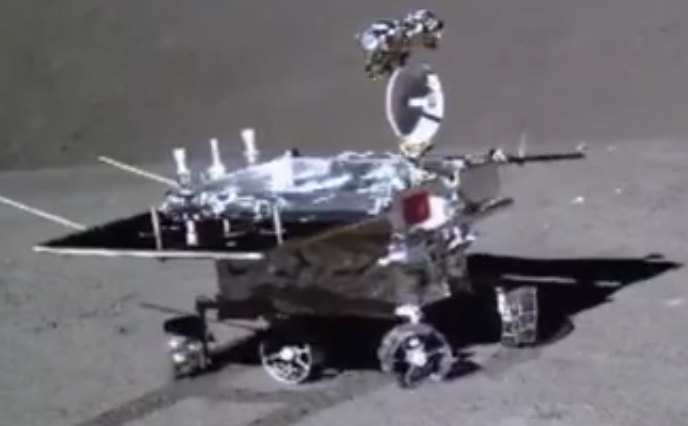
Tampilan umum panorama permukaan dari bajak Yutu-2:

Kamera PCAM di penjelajah:

Pada 3 Januari 2019, setelah semua tahapan prosedur pendaratan yang sukses dan pemasangan saluran komunikasi independen dengan perangkat Chang'e-4 (modul pendaratan dan penjelajah) selesai, era foto studi studi sisi jauh bulan dimulai.
Foto dari kamera:Kamera panorama PCAM (rover): Yutu-2 rover adalah mitra ruang bergerak dan sangat produktif dari modul pendaratan Chang'e-4.
Bajak Yutu-2 melaju lebih dari 160 meter di sepanjang permukaan kompleks sisi jauh bulan.
Jalur bajak Yutu-2 dalam tiga hari lunar:


Sangat menarik bagaimana roda depan bekerja pada bajak Yutu-2 saat berbelok di tempat:

Video peluncuran bajak "Yutu-2"
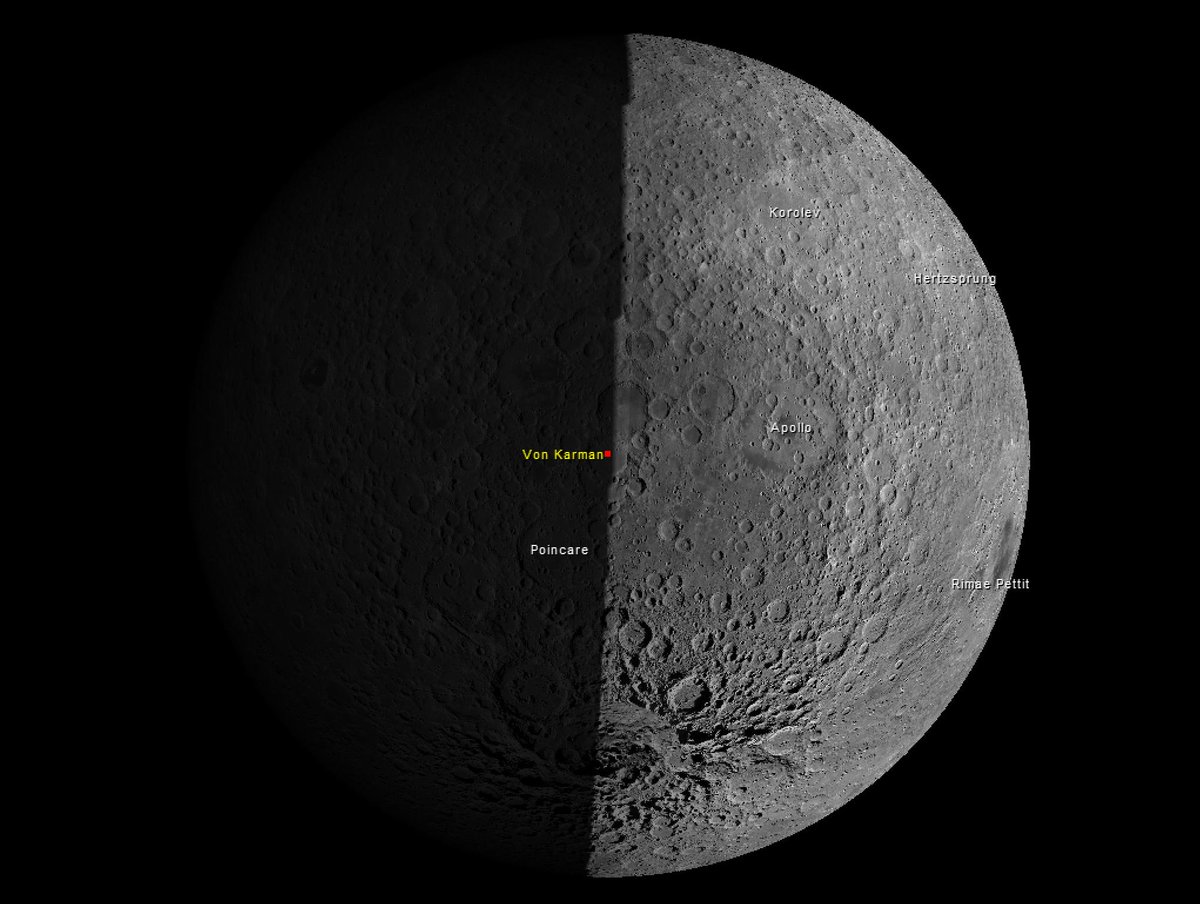
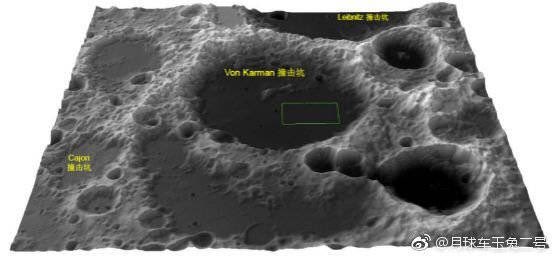
Situs pendaratan misi Chang'e-4: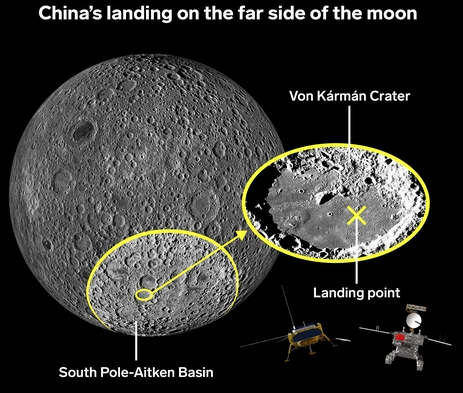
Karena sisi sebaliknya dari bulan juga memiliki relief yang lebih kompleks daripada sisi yang terlihat dari Bumi, dalam proses bergerak di sepanjang permukaan, bajak Yutu-2 mengalami masalah motorik yang lebih serius dan gangguan, dibandingkan dengan yang sebelumnya ditemui oleh pendahulunya, bajak. Yutu ", dikirim ke permukaan bulan pada Desember 2013.
Sayangnya, bajak Yutu pertama misi Chang'e-3, pada 25 Januari 2014, secara teknis tidak bisa bergerak (kegagalan elemen akibat tabrakan) setelah melampaui 114,8 meter di permukaan bulan yang kompleks.
Permukaan bulan di zona pendaratan modul pendaratan Chang'e-4 penuh dengan lipatan, banyak kerikil dan kawah kecil, setelah melakukan setiap gerakan kecilnya, bajak Yutu-2 harus berhenti, mengambil gambar permukaan di sekitar dan mengirim data ini kembali ke Bumi melalui satelit- pengulang.
Para ilmuwan, operator di MCC dan insinyur di Bumi kemudian memproses data ini dan memetakan rute lebih lanjut di mana rover Yutu-2 akan mengikuti.
Antena rover Yutu-2 harus dikonfigurasikan sehingga mengarah ke repeater satelit untuk mengirim dan menerima sinyal kontrol dengan benar, sementara panel surya rover harus dimiringkan secara optimal untuk menerima sejumlah besar sinar matahari untuk memaksimalkan hasil listrik pada saat transfer data.
 Penjelajah roda enam "Yutu-2":
Penjelajah roda enam "Yutu-2":- berat rover total sekitar 140 kg (310 lbs);
- kapasitas muat sekitar 20 kg (44 lbs);
- dapat bergerak di lereng dan memiliki sensor otomatis untuk mencegah tabrakan dengan benda lain;
- Bajak dilengkapi dengan listrik melalui dua panel surya, memungkinkan bajak untuk bekerja selama hari bulan;
- kecepatan maksimum 200 meter per jam (kecepatan di Bulan ini masih belum dapat dicapai - karena elemen di permukaan tidak akan memungkinkan untuk mempercepat dan merusak bajak sebelumnya);
- area penelitian maksimum adalah 3 meter persegi. km;
- Perkiraan waktu kerja - 3 bulan (2160 jam);
- jarak taksiran maksimum - 10 km.
Elemen-elemen roda rover Yutu-2 memang fitur desainnya yang kompleks, yang pada tahap desain harus dikembangkan lebih lanjut oleh para insinyur dari Akademi Teknologi Ruang Angkasa Cina. Mereka menolak untuk menggunakan trek karena ternyata kurang dapat dipertahankan dan rentan dalam pengujian.
Misalnya, jika sebuah batu kecil masuk ke dalam mekanisme lintasan, bajak dapat menjadi macet dan kehilangan jejak. Berbeda dengan implementasi roda, yang lebih andal dan memiliki sumber daya yang meningkat, ia juga dapat dengan aman memindahkan batu hingga setinggi 20 sentimeter.

Namun, jika rover Yutu-2 berguling, ia tidak akan dapat kembali ke posisi kerjanya lagi. Panel surya di sisi baling-baling bulan sangat rapuh, mereka dapat retak atau menjadi berdebu setelah jatuh, yang akan membuatnya tidak dapat digunakan.

Dengan demikian, dalam proses kendali jarak jauh dari rover, perlu untuk berkonsentrasi pada menjaga posisi rover Yutu-2 set stabil mungkin dan tidak membiarkannya jatuh ketika bergerak di sepanjang permukaan.
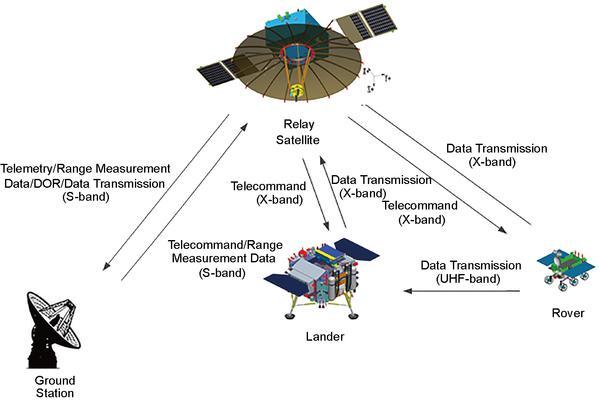
Tetapi bagaimana semua kamera ini pada modul pendaratan Chang'e-4 dan penjelajah Yutu-2 dapat dikendalikan, mengirimkan data dan menerima daya?Tentang pengontrol terpasang dan sistem catu daya modul pendaratan dan bajak.Modul pendaratan Chang'e-4 dan rover Yutu-2 ada di papan pengontrol muatan khusus, yang digunakan untuk menerima, menyimpan, dan mengontrol data ilmiah yang berasal dari berbagai modul dan elemen perangkat.
Selanjutnya, data sinyal kontrol, data ilmiah dan foto menggunakan antarmuka RS-422 (telemetri dan kontrol) dan LVDS (data ilmiah) ditransmisikan ke pengontrol pusat modul pendaratan dan penjelajah, yang mengirimkannya melalui sistem komunikasi ke MCC di Bumi menggunakan satelit. repeater "Tseyuqiao".
Pengontrol payload dari modul pendaratan Chang'e-4 dan rover Yutu-2 dilengkapi dengan prosesor sentral dan susunan FPGA.
Juga, dengan bantuan elemen pengontrol payload, tegangan on-board + 28V dikonversi menjadi tegangan untuk catu daya sekunder + 5V, + -15V, + 3.3V, serta pemantauan konstan nilai tegangan dan suhu modul pengontrol dan perangkat eksternal.
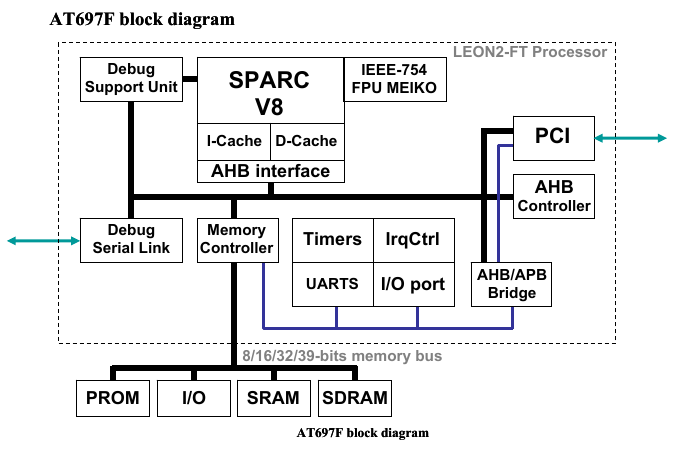
Sebagai mikroprosesor, yang berikut digunakan: ATMEL AT697F (Prosesor Rad-Hard 32 bit SPARC V8).
Sebagai programmable logic integrated circuits (FPGA) digunakan: array enam XILINX XQR2V3000-4CCG717 (Radiasi-Hardened QPro Virtex-II FPGA).
Untuk perlindungan tambahan dari sirkuit mikro terhadap radiasi, digunakan layar aluminium dengan ketebalan minimal 3,8 mm.
Skema peralatan komunikasi dan transmisi data pada modul pendaratan Chang'e-4: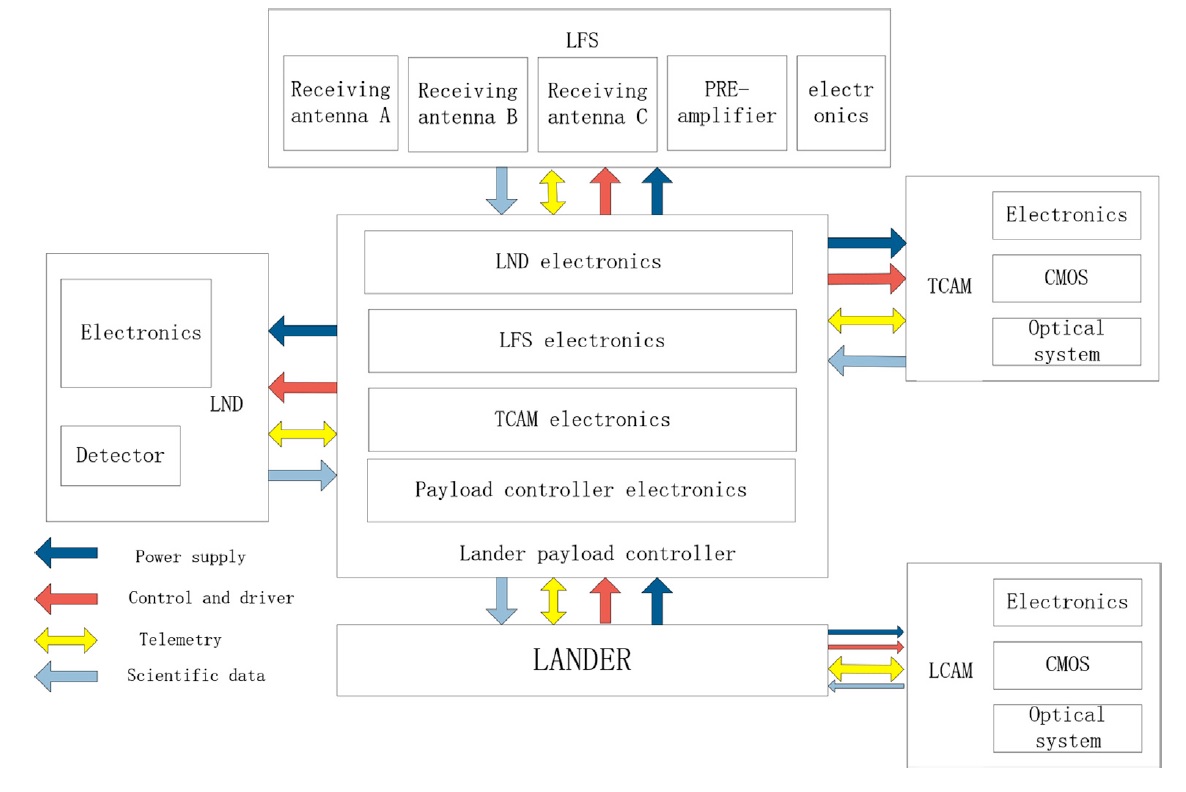
dimana:
- LFS - Spektrometer Frekuensi Rendah;
- LND - Lunar Lander Neutron dan Dosimetri;
- TCAM - Kamera Medan;
- LCAM - Kamera Pendarat.
Skema peralatan komunikasi dan transmisi data pada rover Yutu-2: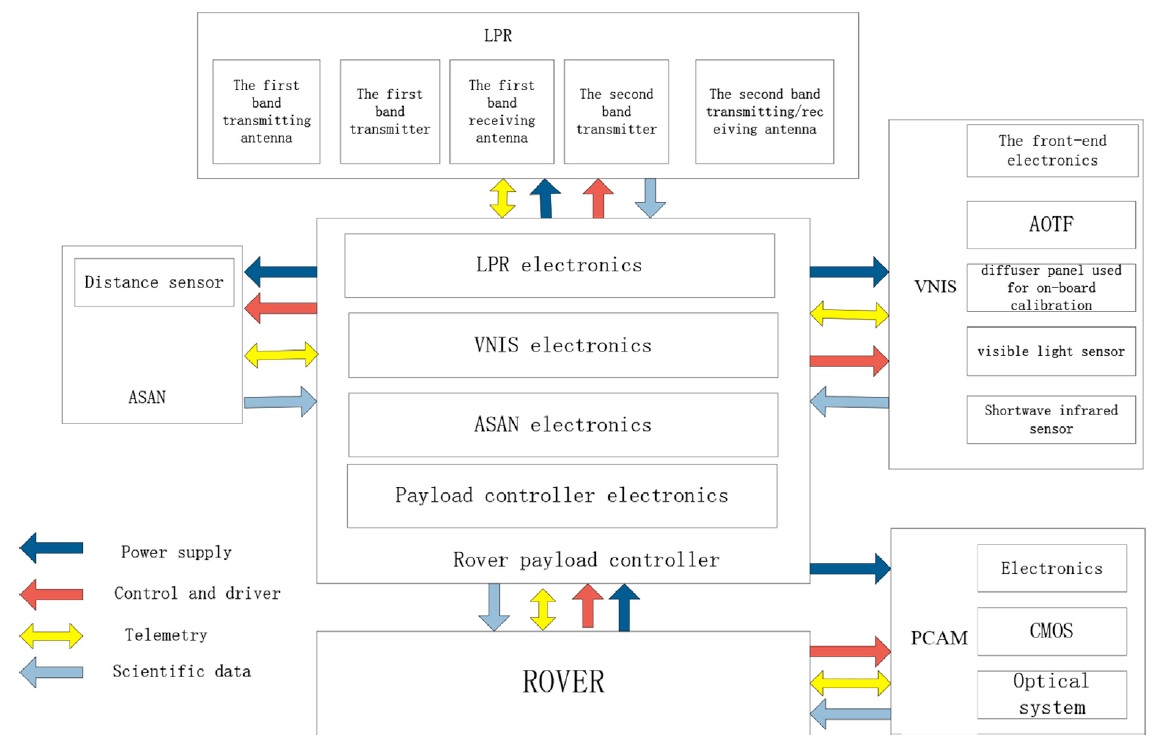
dimana:
- LPR - Radar Penetrasi Lunar;
- ASAN - Penganalisis Kecil Lanjut untuk Netral;
- VNIS - Spektrometer Pencitraan Terlihat dan Hampir Infra Merah;
- PCAM - Kamera Panorama.
Ngomong-ngomong, sebelumnya dalam publikasi saya sudah berbicara tentang hampir semua peralatan ilmiah
modul peluncuran dan
penjelajah , hanya satu perangkat ilmiah yang tetap menyamar - LPR (radar penembus bulan) - yang dapat dilihat secara eksternal, seperti dua "antena" di belakang bajak.
Saya akan mencoba menulis tentang perangkat yang menarik ini sebagai publikasi terpisah.