
Dalam dunia robotika, kerangka kerja perangkat lunak telah berkembang sejak lama dan berhasil yang memungkinkan Anda dengan cepat membuat prototipe sistem robot - Robot Operating System (ROS). Kami di Laboratorium Robotika Sberbank secara aktif menggunakannya dalam pengembangan proyek kami sendiri. Setelah mendapatkan beberapa pengalaman dan mencatat bahwa belum ada satu pertemuan praktis tentang ROS di Rusia, kami memutuskan untuk mengaturnya dan membagikan pengetahuan kami, dan pada saat yang sama mengenal komunitas robot. Pertemuan Rusia ROS 2019 akan diadakan di Skolkovo sebagai bagian dari Forum Robotika 2019 Skolkovo pada 16 April, ini merupakan kesempatan bagi pengembang ROS dan robotika dari semua tingkatan untuk mengabdikan satu hari untuk pertukaran langsung pengalaman dan komunikasi dengan komunitas. Jika Anda terbiasa dengan ROS, maka Anda dapat dengan aman pergi ke
formulir pendaftaran , program dan informasi organisasi juga ditempatkan di sana. Pada pertemuan tersebut, kita akan membahas sejarah ROS dan prinsip-prinsip komunitas, mencurahkan banyak waktu untuk laporan praktis tentang SLAM dan navigasi lidar laser dalam ruangan, dan perencana lintasan robot. Kami akan menunjukkan cara mengontrol manipulator industri melalui ROS, cara menggunakan data sensor, cara bekerja dengan mesin negara SMACH. Dan kami bahkan akan memberi tahu Anda cara memasang ROS tanpa masalah dan mulai mengembangkan robot.
Ngomong-ngomong, partisipasi dalam pertemuan itu gratis, tetapi karena jumlah kursi terbatas, kami meminta Anda untuk menunggu konfirmasi. Dan bagi mereka yang tidak terbiasa dengan ROS, kami menawarkan ikhtisar kecil.
 Pandangan dunia dua dimensi melalui mata ROS
Pandangan dunia dua dimensi melalui mata ROSSistem Operasi Robot adalah kerangka kerja perangkat lunak untuk robot yang mengimplementasikan algoritma dasar untuk membangun robot kompleks. Ini mencakup seperangkat alat, perpustakaan, dan standar yang dirancang untuk menyederhanakan tugas menciptakan perilaku robot yang kompleks dan andal di berbagai platform robot.
Ideologi utama dari proyek ini adalah prinsip-prinsip open source, dokumentasi paket, penggunaan kembali kode dan komunitas global robotika.
Mengapa itu dibuat?
Membuat perangkat lunak robot universal yang benar-benar andal memang sulit. Dari sudut pandang robot, masalah yang tampaknya sepele bagi orang tersebut menghasilkan kompleksitas tinggi pengembang pemrograman sistem robot. Sangat sulit untuk bekerja dengan tugas-tugas ini sehingga kadang-kadang tidak mungkin untuk menyelesaikannya sendiri atau dalam tim kecil.
Akibatnya, ROS dibuat dari bawah ke atas untuk merangsang pengembangan perangkat lunak kolaboratif untuk robotika. Misalnya, satu laboratorium mungkin memiliki ahli SLAM dalam ruangan dan dapat menawarkan sistem SLAM kelas dunia. Grup lain dapat memiliki pakar dalam menggunakan SLAM untuk navigasi, dan grup lain dapat mengembangkan pendekatan visi komputer yang berfungsi dengan baik untuk mengenali objek kecil di lingkungan yang berantakan. ROS dirancang khusus untuk kelompok-kelompok tersebut untuk berkolaborasi dan membangun kerja masing-masing.
Latar belakang pendek
ROS adalah proyek besar dengan sejarah dan sejumlah besar peserta. Kebutuhan akan sistem kolaborasi terbuka diperlukan oleh banyak orang di komunitas riset robotika, dan banyak proyek diciptakan untuk tujuan ini.
Pada pertengahan 2000-an, Universitas Stanford melakukan berbagai upaya terkait dengan penggunaan AI dalam robotika, misalnya, program Robot AI STanford (STAIR) dan program Personal Robots (PR) untuk membuat prototipe khusus dari sistem perangkat lunak dinamis yang dirancang untuk digunakan dalam robotika . Pada 2007, Willow Garage menyediakan sumber daya yang signifikan untuk lebih mengembangkan konsep-konsep ini dan membuat prototipe. Upaya tersebut didukung oleh para peneliti yang tak terhitung jumlahnya yang berbagi waktu dan pengalaman mereka baik untuk berkontribusi pada ide dasar ROS, dan paket perangkat lunak utama. Semua perangkat lunak dikembangkan menggunakan lisensi sumber terbuka BSD dan secara bertahap menjadi platform yang banyak digunakan dalam komunitas peneliti robotika.
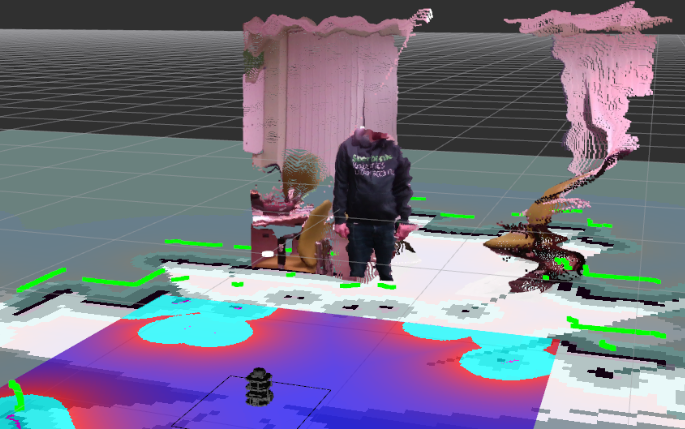 Pandangan dunia tiga dimensi melalui mata ROS
Pandangan dunia tiga dimensi melalui mata ROS
Komunitas ROS Global
Sejak awal, ROS dikembangkan di beberapa institusi dan untuk beberapa robot, termasuk banyak institusi yang menerima robot PR2 dari Willow Garage. Meskipun akan lebih mudah bagi semua peserta untuk meng-host kode mereka di server yang sama, seiring waktu model "federasi" telah menjadi salah satu kekuatan ekosistem ROS. Setiap grup dapat menjalankan repositori kode ROS mereka sendiri di server mereka sendiri, dan mereka sepenuhnya memilikinya dan mengendalikannya. Mereka tidak membutuhkan izin siapa pun. Jika mereka memutuskan untuk membuat repositori mereka tersedia untuk umum, mereka dapat memperoleh pengakuan dari komunitas yang mereka layak dapatkan atas pencapaian dan manfaat dari penguji dan saran untuk perbaikan, seperti semua proyek sumber terbuka.
Selama beberapa tahun terakhir, ROS telah berkembang dan sekarang mencakup komunitas besar pengguna di seluruh dunia. Secara historis, sebagian besar pengguna telah di laboratorium penelitian, tetapi mereka semakin muncul di sektor komersial, terutama di industri dan layanan robotika.
Komunitas ROS sangat aktif dan memiliki lebih dari 3.000 anggota dalam daftar discourse.ros.org, lebih dari 8.000 pengguna di wiki dokumentasi bersama dan sekitar 22.500 pengguna di situs untuk jawaban atas pertanyaan ROS. Wikipedia berisi lebih dari 22.000 halaman, dan kecepatan pengeditan sekitar 30 per hari.
Saat ini, jumlah pengguna ROS berbahasa Rusia ada di peringkat 15 di antara negara-negara lain menurut ROS Metrics Report 2018. Mari kita bertemu, berdiskusi, dan memperbaikinya. Anda juga dapat mempelajari tentang kemampuan ROS untuk proyek Anda, tentang praktik nyata pengembangan robot.
Untuk berpartisipasi sebagai pendengar, isi
formulir .
Dan jika Anda memiliki pesan yang menarik untuk komunitas,
Anda masih
bisa menjadi pembicara .
Program: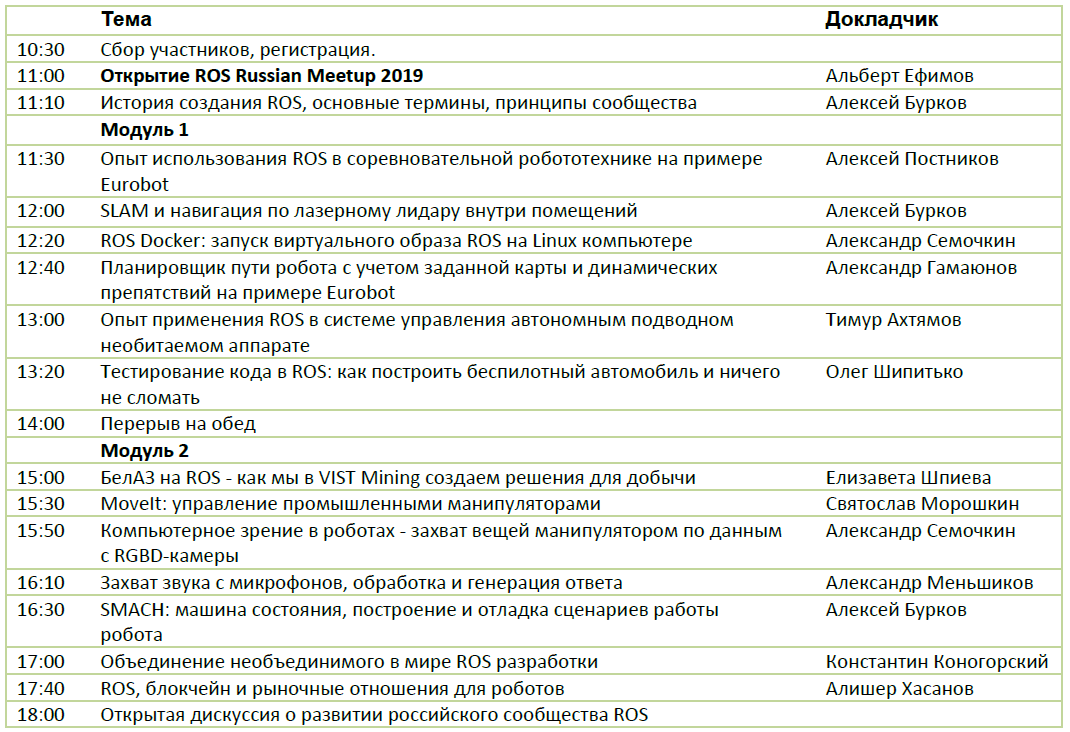
Acara ini diselenggarakan oleh Laboratorium Robotika Sberbank.