Halo semuanya! Pengembangan hexapod hampir menyelesaikan versi pertempuran pertama, dan sekarang saatnya untuk menggambarkan semua pengisian elektroniknya. Saya juga menambahkan HC-SR04 untuk mendeteksi hambatan yang sangat kurang untuk kepuasan visual dalam penampilan hexapod. Akan ada sedikit video baru dan Anda memiliki kesempatan untuk menendang saya secara elektronik.
Tahapan pengembangan:Bagian 1 - DesainBagian 2 - perakitanBagian 3 - KinematikaBagian 4 - lintasan dan urutan matematikaBagian 5 - ElektronikBagian 6 - transisi ke pencetakan 3DBagian 7 - perumahan baru, perangkat lunak aplikasi, dan protokol komunikasiLihat dengan menginstal HC-SR04 Awalnya, kasing dirancang untuk papan daya dan kontrol yang terpisah, sehingga yang ditempatkan di tengah kasing lebih dekat ke baterai, dan kasing kedua dibawa untuk memudahkan debugging. Jadi mari kita mulai.
Unit kontrol
Unit kontrol adalah "otak" dari hexapod berdasarkan pada pengontrol SAM3X8E dan terdiri dari dua papan: papan dengan pengontrol dan papan distribusi. Papan dengan pengontrol sudah digunakan (gambar di bawah), tetapi papan distribusi harus dibuat. Mungkin di masa depan saya akan memesan papan di pabrik dengan tempat untuk controller untuk menghapus sandwich.
Tujuan utama papan distribusi adalah untuk memberi daya pada perangkat periferal "ringan", pengontrol, dan mendistribusikan sinyal di antara pin-pinnya. Saya telah menyusun daftar persyaratan saya untuk forum ini:
- Kemampuan untuk menginstal di papan HLK-RM04 (konverter UART-WIFI);
- Kemampuan untuk menghubungkan layar I2C;
- Kemampuan untuk menghubungkan HC-SR04;
- Kemampuan untuk mengukur tegangan baterai = tegangan suplai papan;
- Kemampuan untuk mengukur tegangan suplai periferal dan HLK-RM04;
- Hubungkan tweeter untuk menunjukkan daya baterai;
- Indikasi LED keadaan sistem: sesuatu yang penting jatuh (konfigurasi tidak benar atau sesuatu yang lain), sesuatu yang tidak penting jatuh (tampilan misalnya), semuanya OK;
Setelah memutuskan sedikit pada dasar unsur dan menghargai kemungkinan telur sarang saya dengan bubuk longgar, saya segera mulai memasang papan tanpa membuat diagram sirkuitnya. Itu bekerja pertama kali dan saya tidak menemukan tiang tembok dalam pekerjaan. Kabel adalah sebagai berikut:
Dia secara khusus membuat trek lebar sehingga tidak ada masalah dalam proses pembuatan. Saya memutuskan untuk membuat papan dengan LUT, ternyata hanya 2 kali. Di bawah spoiler foto untuk membandingkan opsi yang gagal dan berhasil (di sebelah kiri tidak berhasil, di sebelah kanan berhasil).
Nah, maka semuanya sesuai dengan instruksi - kita menipu papan, mengebor lubang dan membuang komponen. Hasilnya tidak lama datang:
HLK-RM04 dimasukkan di tengah, loop ke papan daya dimasukkan ke sisir di sebelah kanan, daya disuplai ke kiri. Tegangan di papan diukur dengan pembagi tegangan sederhana. Selama operasi jangka panjang (30-40 menit), regulator tegangan untuk HLK-RM04 memanas secara signifikan dan saya hanya memasang radiator.
Papan daya
Konsumsi total saat ini (puncak) drive sekitar 30A (rata-rata ~ 1,3A per drive) di bawah beban berat, saat berjalan 10-13A, saat istirahat - 5-6A. Pengukuran dilakukan secara empiris dengan multimeter.
Saya memutuskan untuk membuat daya terpisah untuk setiap drive berdasarkan regulator tegangan linier, yaitu 18 regulator tegangan linier - satu untuk setiap drive. Sebagai regulator linier digunakan LM317D2T-TR yang dikonfigurasi untuk output 5V. Ada beberapa alasan untuk menggunakan 18 regulator tegangan linier dan menggunakan regulator pada prinsipnya:
- Anda tidak dapat langsung menghubungkan drive ke baterai, untuk mereka tegangan suplai maksimum yang diijinkan adalah 6V;
- Kemandirian relatif kecepatan \ upaya drive dari tegangan input;
- Regulator linier ditumpuk. Saya pernah membeli mereka paket 70pcs pada Ali (item membuat kontribusi terbesar untuk solusi);
- Saya tidak menemukan regulator tegangan linier untuk arus seperti itu;
- Saya tidak menemukan sirkuit DC-DC yang ringkas dan ringan untuk arus seperti itu;
- Opsi menghubungkan regulator secara paralel agak meragukan;
- Opsi "regulator linear + transistor penguatan" menghilangkan rangkaian daya dari semua fungsi pelindung yang disediakan oleh regulator linier (setidaknya itulah yang ditulis orang dan dalam hal ini saya setuju dengan mereka);
- Saya sangat miskin dalam merancang switching pasokan listrik;
Papannya sangat sederhana dan saya tidak mulai menggambar diagram sirkuit untuknya, dan keinginan untuk segera melihat hasilnya juga membuatnya terasa. Kabel adalah sebagai berikut:
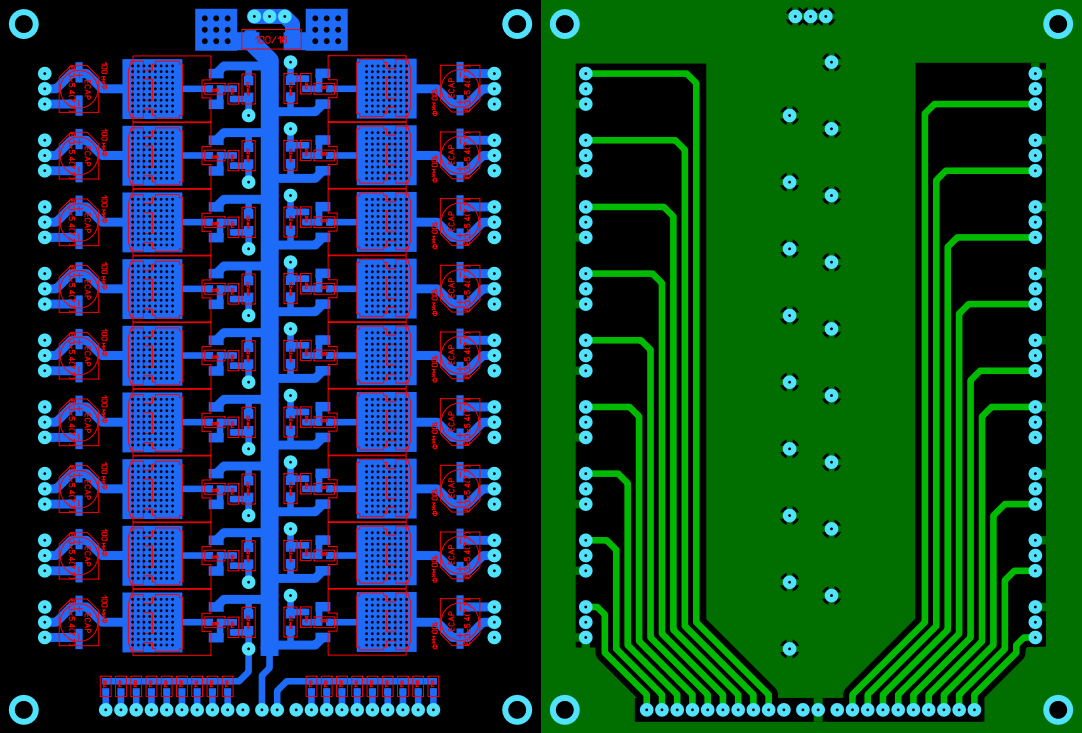
Di atas ada bantalan kontak untuk menyolder kawat untuk baterai, dari bawah sisir untuk kabel dan daya ke unit kontrol, dan drive terhubung di sisi. Awalnya, saya juga ingin memungkinkan untuk mengukur jumlah arus yang dikonsumsi oleh setiap servo drive dan mengukur suhu papan, tetapi memutuskan untuk tidak menyulitkannya.
Papannya sederhana dan dapat diandalkan, tidak ada yang bisa dipatahkan. Melakukan uji beban pada tegangan input 11.1V (3S LiPo) dan 7.4V (2S LiPo). Pada tegangan input 11.1V, seperti yang diharapkan, pengontrol terlalu panas dan perlindungan suhu dipicu saat berjalan (radiator tidak menghemat, dan pengontrol SMD juga), yang memaksa saya untuk menurunkan tegangan input. Pada tegangan 7.4V, regulatornya hangat dan dengan berjalan lama, perlindungannya tidak berfungsi lagi - itulah yang Anda butuhkan.
Papan juga membuat LUT dan ternyata cukup baik untuk pertama kalinya. Sayangnya, hanya ada foto versi eksperimental dari papan, dan saya tidak benar-benar ingin mengambil yang baru sekitar 4 jam di suatu tempat dan tidak ingin membongkar itu demi fotografi (saya perlu membongkar sekitar 70% dari kasus). Perbedaan antara yang lama dan yang baru hanya dengan tidak adanya lubang di garis tengah papan (percobaan lucu dilakukan).
Beberapa video
Pengujian Kinerja HC-SR04
Sikap kucing saya terhadap hexapod