Seekor monyet (simpanse) mengeluarkan rayap dari rayap menggunakan tongkat. Di foto kedua, gorila menggunakan tongkat untuk mengumpulkan rumput yang dia butuhkan.
Seekor monyet (simpanse) mengeluarkan rayap dari rayap menggunakan tongkat. Di foto kedua, gorila menggunakan tongkat untuk mengumpulkan rumput yang dia butuhkan.Pengembang dari Amerika Serikat
membuat algoritma khusus untuk robot , yang memungkinkan
robot untuk menggunakan alat tambahan untuk menyelesaikan tugas. Dan itu relatif sederhana - dengan cara tertentu untuk memindahkan objek dari titik A ke titik B.
Algoritma terdiri dari dua bagian. Yang pertama memungkinkan robot untuk memindahkan objek secara acak, melakukan semacam eksperimen. Bagian kedua memungkinkan untuk menilai konsekuensi dari tindakan tertentu menggunakan jaringan saraf. Ternyata, robot, yang bekerja sesuai dengan algoritma, secara efektif menggunakan alat bantu tanpa pelatihan.



Seseorang menggunakan banyak alat tambahan setiap hari. Hewan juga mampu melakukan hal ini - burung beo, gagak, monyet, dan beberapa makhluk hidup lainnya dapat menggunakan tongkat, kerikil, dan duri untuk mencapai tujuan yang diinginkan (misalnya, mengambil larva kumbang dari bawah kulit kayu).
Bagi kami, penggunaan pisau untuk mengiris roti cukup jelas. Tetapi untuk robot yang perlu menjelaskan setiap tindakan dalam bentuk bahasa mesin - tidak sama sekali.
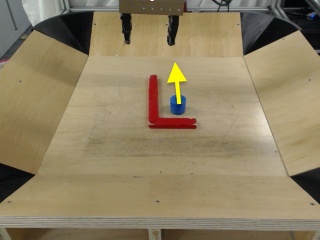
Para ilmuwan dari University of California di Berkeley telah mengembangkan cara untuk melatih robot untuk menggunakan alat bantu dan membuat keputusan pada aplikasi mereka dalam situasi tertentu. Algoritma "memvisualisasikan" tugas, menunjukkan robot ke arah mana contoh harus dipindahkan. Dan sudah robot (ini adalah manipulator robot biasa) mengambil instrumen dan memindahkan objek. Semua gerakan dilacak di kamera.

Algoritma ini didasarkan pada jaringan saraf. Program khusus menghitung urutan tindakan yang berbeda untuk robot yang "dimasukkan" ke jaringan saraf. Itu menghasilkan video yang menunjukkan apa yang akan terjadi sebagai hasil dari pelaksanaan tindakan tertentu.
Manipulator diberi perintah untuk melakukan suatu tindakan. Jika hasil nyata bertepatan dengan yang direncanakan, tugas dihitung. Dalam perjalanan kerja, berbagai opsi video dibandingkan dengan gambar yang disediakan oleh pengguna dan menampilkan hasil akhir dari tugas tersebut. Setelah urutan tindakan optimal ditemukan, robot melanjutkan untuk menyelesaikan masalah.


Proyek ini menggabungkan pendekatan pembelajaran mesin seperti pembelajaran
non-demonstrasi dan pelatihan simulasi . Dalam kasus pertama, robot memilih opsi secara acak. Akibatnya, sampel data yang signifikan dihasilkan, yang membantu untuk mencapai hasil yang optimal. Yang kedua, pengembang dengan jelas menunjukkan robot bagaimana menggunakan alat dalam satu kasus atau yang lain. Dalam situasi inilah solusi referensi direkam pada kamera yang dengannya robot membandingkan konsekuensi dari tindakannya.
Dalam beberapa kasus, robot "memahami" bahwa yang terbaik adalah menyelesaikan tugas tanpa elemen tambahan - dan melakukannya. Alat digunakan tanpa pelatihan, bahkan jika robot belum pernah ditampilkan sebelumnya.