Halo habratchitel sayang!Bahkan belum empat tahun berlalu sejak model kerja pertama dari
GPS bawah laut kami melihat cahaya, sejak itu kami
makan satu pon garam dan membuat banyak tumpukan berbagai sistem dan perangkat, tetapi dengan kehendak takdir, satu tes penting sejauh ini telah melewati anak sulung kami. Dalam artikel ini saya akan memberi tahu Anda bagaimana hasilnya.
Semua orang yang peduli dengan topik robot bawah air, kendali dan navigasi mereka - selamat datang di kucing dengan kayak beku kami di perairan April reservoir Volgograd!

(Akhtung! Ada banyak foto di bawah potongan!)
"... tempat kapal yang sebenarnya, meskipun diketahui, tetapi itu tidak disengaja,
memang, tetapi tidak diketahui pada titik apa. "
Aleksishin V.G. dan navigasi Praktis lainnya, 2006. hlm. 71.
Tentang apa semua ini?
Bagi mereka yang sama sekali tidak punya waktu untuk membaca, saya akan menjelaskan secara singkat masalahnya:
GPS tidak menangkap air, dan komunikasi radio tidak berfungsi, hampir semua navigasi dilakukan menggunakan akustik, dan komunikasi dilakukan menggunakan akustik, kabel, dan sangat sering di air jernih, menggunakan
cahaya .
Untuk pendatang baru, secara tradisional saya akan memberikan tautan ke publikasi kami sebelumnya di hub, di mana kami memberi tahu segalanya tentang komunikasi dan navigasi bawah laut: dari sejarah membuat GPS bawah air kami dan mentransmisikan suara "video" melalui air dan ke instruksi tentang cara membuat antena hidroakustik sederhana dari sampah:
-
GPS bawah laut dari awal per tahun-
Kami membuat modem sonar terkecil di dunia-
Tentang efek cyanobacteria pada fungsi bicara presiden-
Membuat antena sonar sederhana dari tempat sampah-
Sesi transmisi suara video melalui air dengan pencahayaan-
"GPS" bawah air pada dua transceiver-
Navigasi di bawah air: Bantalan bukan bantalan - Anda ditakdirkan untuk sukses-
GPS Bawah Air: lanjutanDrone terbang dan berguling, merangkak di tanah dan mengambang di permukaan mengirimkan video dari kamera mereka secara real time, dan kadang-kadang koordinat GPS, dan operator selalu tahu di mana perangkatnya berada, apalagi, sering kali operator dapat melihatnya.
Dengan kendaraan bawah air (TNPA atau ROV), semuanya agak berbeda. Membiarkan perangkat masuk ke perairan gelap, Anda hanya bisa memastikan satu hal - pasti di bawah air.
Sedikit lebih dalam ke masalah
Perangkat datang dalam kelas yang berbeda, dibagi berdasarkan ukuran dan tugas. Yang paling sederhana dan terkecil (seperti milik kita), inspeksi hanyalah kamera video pada kabel dengan motor. Yang lebih kompleks dan lebih besar dapat dilengkapi dengan manipulator dan adaptasi menarik lainnya,
beberapa spesimen berukuran gazelle dilengkapi dengan kapal khusus,
bajak laut ,
dan awak pesawat serta memiliki total kapasitas lebih dari 200 hp. Panjang kabel bisa dari puluhan hingga ratusan meter di perangkat kecil dan mencapai ribuan meter di perangkat besar besar.
TNLA secara nominal dikendalikan oleh umpan balik visual - melihat gambar yang ditransmisikan dari kamera kamera melalui kabel, kadang-kadang dilengkapi dengan sonar, karena terkadang air
selalu berawan.
Pendekatan ini persis memiliki satu kelemahan: melihat di monitor gambar elemen lanskap yang menarik, benar-benar mustahil untuk mengatakan dengan tepat di mana ia berada.
Navigasi bawah laut
Mereka berjuang dengan kelemahan ini menggunakan sistem penentuan posisi akustik. Sebagai aturan, mereka menempatkan pinger (secara berkala memancarkan sinyal khusus) atau suar transponder pada perangkat. Sinyal pinger terdeteksi, jarak ditentukan, dan kemudian, dengan sudut (atau dua sudut - horizontal dan vertikal) dari kedatangan sinyal dan jarak, lokasi perangkat ditentukan. Sistem semacam itu disebut UKB (kependekan dari Ultrashort-Base). Mereka berhubungan dengan rangefinder goniometrik dan memiliki seluruh daftar kerugian, terutama yang berkaitan dengan tugas ini. Yang asing paling sederhana
biayanya dari
17.000 euro , kita
juga ada di sana , tidak lebih buruk dan lebih terjangkau, tetapi masih tidak gratis.
Untuk menentukan sudut horisontal (dan dalam sistem lama dan vertikal, pada pinger baru mentransmisikan kedalamannya) sinyal kedatangan responden atau pinger, diperlukan antena penunjuk arah. Perangkat itu sendiri tidak sederhana dan memerlukan instalasi pada batang, yang harus dipasang di kapal. Dengan rentang, kedalaman, dan sudut horizontal (atau rentang dan dua sudut), hanya posisi relatif dari peralatan yang ditentukan. Dalam hal ini, keakuratan menurun dengan meningkatnya jarak.
Keakuratan menentukan sudut tergantung pada:
- karakteristik antena itu sendiri dan biasanya berjumlah sekitar 0,5-3 °, dan dalam sistem yang paling canggih itu mencapai 0,03 °, tetapi itu sepadan dengan kesenangan hanya dengan uang iblis. Biarkan saya mengingatkan Anda bahwa 1 ° pada jarak 1000 meter memberikan sebaran 17 meter (mis. ± 17 meter).
- tentang seberapa baik posisi antena itu sendiri ditentukan (roll and trim);
- dari kondisi hidrologi tertentu. Sebagai contoh, adalah mungkin untuk mendeteksi bukan sinyal langsung, tetapi beberapa refleksi atau jumlahnya, sehingga menentukan sudut kedatangan sinyal yang dipantulkan. Dan dia bisa bercermin dari apa pun - termasuk dari arah yang sama sekali berbeda.
Setelah jarak dan sudut kedatangan sinyal ditentukan, Anda harus mengikat semua ini dengan geografi. Artinya, Anda perlu mengetahui posisi geografis antena penunjuk arah dan arah nol relatif terhadap arah ke utara. Kemudian Anda dapat memecahkan
masalah geodesi langsung dan menentukan posisi kendaraan bawah air dalam koordinat geografis. Artinya, Anda tetap harus memiliki kompas dan GPS di antena.
Secara umum, saya yakin bahwa UHF harus diterapkan hanya di tempat yang sangat tidak mungkin untuk menggunakan sistem basis panjang.
Saya tekankan - tentu saja. Misalnya, ketika objek derek diposisikan, dan Anda harus menempuh jarak yang sangat jauh. Dalam hal ini, akan perlu untuk memindahkan elemen-elemen dari pangkalan yang panjang sangat sering dan ini akan menyebabkan biaya terlalu banyak waktu dan usaha, atau, untuk contoh lain, tidak mungkin untuk memasang pelampung dari pangkalan yang panjang di permukaan karena kedalaman yang besar - tali yang sangat panjang dan, pada umumnya, skema penahan akan diperlukan sangat rumit. Dalam semua kasus lain, saya menyulap Anda: gunakan basis yang panjang - lebih mudah, lebih dapat diandalkan dan lebih akurat.
UKB baik dan sangat diperlukan di mana Anda perlu menemukan sesuatu, secara bertahap mendekati dan meningkatkan akurasi. Tampaknya saya menentang UHF dan untuk DB, tetapi saya hanya meminta penggunaan peralatan sesuai dengan tujuan yang dimaksudkan. Pada akhirnya, kami juga melakukan KGB, dan mengingat ini, sulit untuk menuduh saya bias.
Sistem jarak jauh (DB) - ini adalah ketika ada beberapa penerima atau pemancar jarak jauh (misalnya, GPS adalah sistem jarak jauh). Mereka mempertahankan keakuratannya di dalam basis, mereka jauh lebih rentan terhadap pelemparan dan umumnya memberikan hasil yang lebih baik, karena mereka berhubungan dengan sistem pengintai atau pengintai diferensial.
Untuk waktu yang lama saya tidak bisa menjawab pertanyaan - mengapa semua orang mencoba memalu palu dengan sekop? Tetapi seiring berjalannya waktu, saya dan kolega saya sampai pada kesimpulan yang mengecewakan: pertama, orang berpikir dengan sangat sederhana - satu antena dan satu pinger lebih mudah daripada beberapa elemen dari basis panjang yang terpisah satu sama lain. Kedua, sampai saat ini, sistem DB hanya diwakili oleh yang disebut dasar, instalasi yang membutuhkan waktu dan uang yang sangat serius.
Kami telah lama berada dalam perang melawan
buta huruf pengguna urutan hal-hal yang mapan. Yang dimulai ketika kami membuat contoh pertama dari GPS bawah laut kami, yang merupakan sistem pangkalan panjang dengan permukaan daripada pangkalan bawah.
GPS di bawah air
Mari kita kembali ke pahlawan ujian hari ini. Sistem navigasi diwakili oleh basis navigasi itu sendiri, dibentuk oleh empat
repeater pelampung apung
dari sinyal GNSS:

Pelampung sebelum pekerjaan mulai dipasang di kolam dengan bantuan jangkar dan tali
batu . Semua yang perlu dilakukan adalah melepaskan pelampung di jangkar, sebelum itu dengan mengklik sakelar. Itu benar-benar semua yang perlu dilakukan.
Elemen lain dari sistem adalah penerima navigasi yang terletak di objek bawah air:
 Penerima
Penerima navigasi
RedNODE (silinder kuning kecil) dipasang di bagian belakang unit. Didukung oleh jaringan robot dan mengirimkan data melalui kabel perangkat.
Karena pelampung hanya memancarkan, dan penerima hanya menerima (beroperasi sesuai dengan skema rentang diferensial) dan tidak ada yang mengganggu siapa pun, maka pada satu set pelampung di satu wilayah perairan, sejumlah penerima tersebut dapat bekerja. Artinya, secara teoritis seluruh armada kendaraan bawah laut dan penyelam dalam jumlah dan proporsi berapa pun dapat ditelusuri secara teoritis.

Karena tergesa-gesa, kami agak santai menyematkan penerima navigasi dan menambahkan daya apung yang terbuat dari bahan isolasi panas padat.
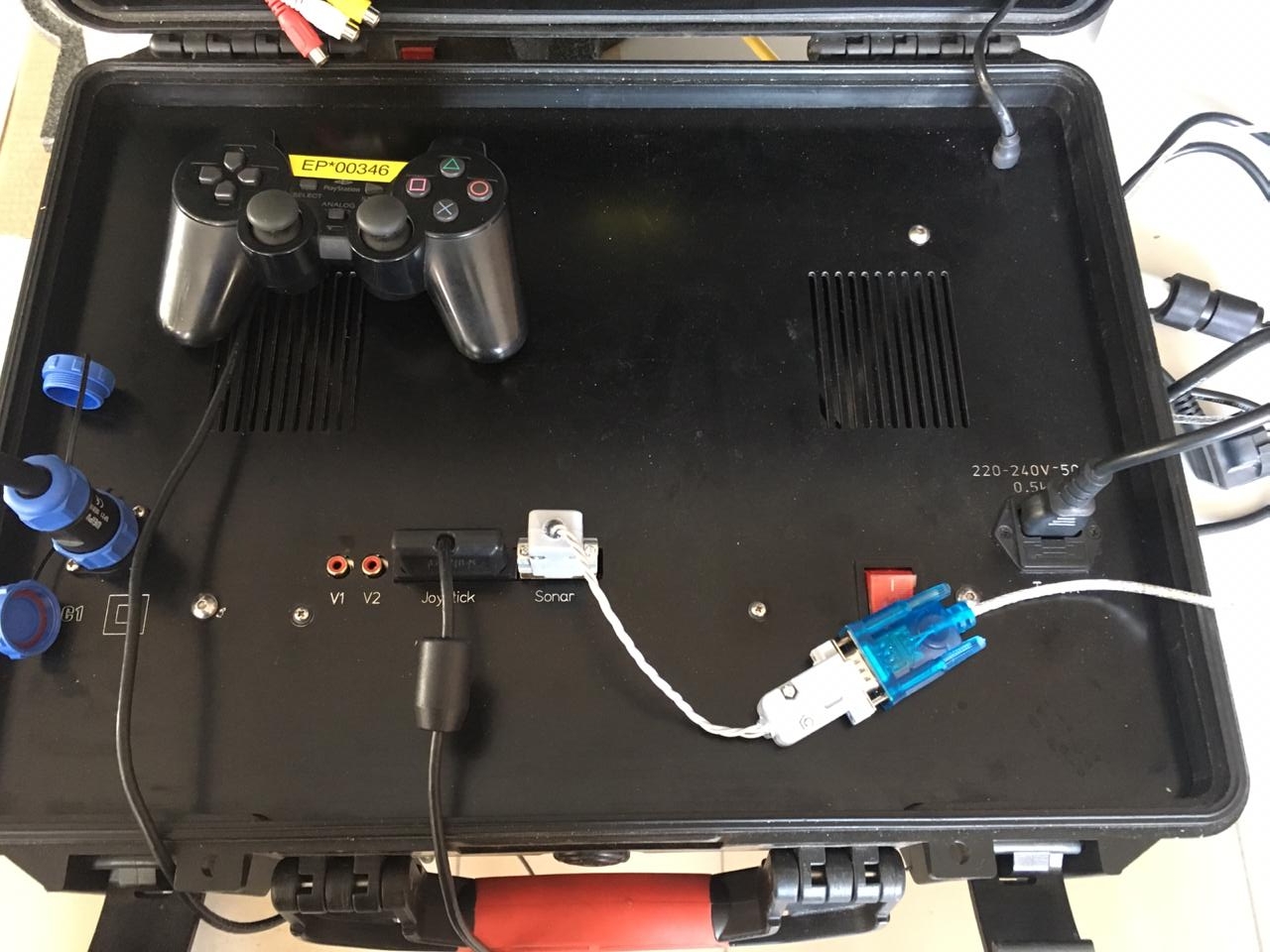
Data dari receiver masuk ke case kontrol dan dimasukkan ke laptop manapun melalui RS232 <-> USB converter (konektor "Sonar" di foto).
Koordinat dalam sistem ini dihasilkan di penerima (mis., Secara terminologis, sistem ini adalah sistem navigasi dan bukan sistem penentuan posisi). Tetapi karena TNLA beroperasi pada kabel, pada prinsipnya, seharusnya tidak ada masalah dalam mentransfer lokasi yang dihitung pada perangkat ke kabel ke atas. Omong-omong, penerima navigasi mengemulasi penerima GNSS biasa dan dapat langsung dihubungkan sebagai penerima GPS permukaan yang paling biasa, misalnya, ke aplikasi
SAS.Planet , yang kami lakukan.
Penempatan robot bawah air adalah gagasan utama yang menangkap kami pada tahun 2015, ketika kami mulai mengembangkan GPS bawah air kami. Ironi takdirnya adalah aplikasi inilah yang tetap tidak diklaim hingga 2018 - sistem ini terutama digunakan dalam kinerja penyelaman.
Hal ini sebagian disebabkan oleh kenyataan bahwa produsen TNLA sangat enggan untuk memodifikasi perangkat mereka, sebagian karena fakta bahwa pengguna memiliki prasangka yang sangat kuat bahwa mengatur pelampung sulit dan memakan waktu.
Sekarang peralatan kelas ujian sedang dilakukan oleh semua orang, secara harfiah, kita sudah kehilangan hitungan. Berikut ini daftar yang jauh dari lengkap untuk kejelasan:
- Seluruh
TOP-10 2019- Dan
TOP-12 2019 lainnya-
Dan bahkan TOP lain , kali ini perangkat anggaran
-
ROVBUILDER Kami
-
OpenROV yang diakui-
Aparat Kanada
-
GNOM Domestik
- Mencurigai sesuatu yang mengingatkan pada
Blueye-
Perangkat lain
Ada sekitar selusin atau dua tim universitas yang berbeda, ditambah jika Anda melihat, masih ada banyak proyek serupa, mengingat bahwa kami bahkan belum menyentuh perangkat kelas pekerja yang lebih besar dan perangkat otonom apa pun (yang disebut AUV atau AUV).
Mereka sedikit berbeda satu sama lain, dan memiliki fungsi yang sangat mirip. Kami percaya bahwa produsen robot yang akan melengkapi perangkat mereka dengan sistem navigasi yang sederhana dan dapat diandalkan akan menerima keuntungan yang menentukan.
Ketika kami memulai kami bertiga, salah satu dari kami (
Pencipta ) berada di Moskow, mengurus semua masalah organisasi, keuangan, dan pemasaran, dan saya dan
StDmitriev berada di Volgograd, dan kami dengan air dingin selutut menempatkan 4 pelampung dari sebuah perahu karet yang dibeli. di dasalomba. Akhirnya, kami membutuhkan waktu 15 hingga 30 menit. Ini adalah sebagian alasannya, ketika mereka memberi tahu saya bahwa menempatkan pelampung itu sulit dan panjang,
tangan saya meraih Mauser dan wajah saya biasanya menunjukkan kebingungan.
Lebih dalam lagi
Jadi kali ini, dengan melakukan empat tes, kami memasukkan semuanya ke dalam dua mobil penumpang:

Bagasi semacam itu diperlukan untuk pengujian:
- ROVBUILDER RB-150 kendaraan bawah laut dengan kabel 100 meter dan kotak kontrol
- Kasing dengan empat pelampung RedBASE
- Generator bensin 800 watt
- Kayak tiup ganda "Shuya"
- Meja lipat dengan empat kursi lipat
- Empat pelat paving dengan tali 20 meter sebagai jangkar
- laptop
- Stok makanan selama 5-6 jam untuk empat orang
Dengan semua kesederhanaan yang tampak, kita tidak akan dapat bekerja dengan sistem UHF dengan seperangkat kapal - untuk memasang antena UHF, Anda memerlukan perahu dengan dasar yang keras dan batang. Pada saat yang sama, harus berada di atas air sepanjang waktu. Misalnya, pada 0 ° udara tidak terlalu nyaman, dan kadang-kadang tidak mungkin (lihat "angin, ombak, pelemparan").
"Pos kontrol" dikerahkan sekitar 10 menit, dan dalam kasus kami terlihat seperti ini:

Secara tradisional, semua tes yang membutuhkan reservoir yang agak luas dilakukan di
mulut Sungai Pichuga , di tempat mengalirnya ke Waduk Volgograd.
Selam lebih jauh
Saya menyebutkan bahwa pelampung biasanya dipasang dalam 15-30 menit dan kali ini tidak terkecuali. Terlebih lagi, saya secara khusus menyalakan stopwatch, dan dua orang yang menggunakan kayak berhasil melakukannya dalam 24 menit, dengan dayung, bertarung dengan angin dan kegembiraan, seperti Papanin asli.

Foto menunjukkan bagaimana pelampung berada di kayak tiup kecil. Keempat bagian.
Anda mungkin berpikir bahwa alat itu juga dicelupkan ke dalam perahu, tetapi tidak sama sekali: alat itu dibawa ke air dari pantai dengan bantuan orang yang dilengkapi dengan sepatu karet:

Dan inilah foto-foto pertama dunia bawah laut:

Ya, ini bukan Laut Merah untuk Anda :-) Airnya terlihat transparan, tetapi kenyataannya jarak pandang dekat pantai tidak melebihi 1-2 meter.
Masalah serius segera menjadi jelas - pada layar operator di hari yang cerah, tidak ada yang terlihat jelas (kecuali untuk pantulannya):

Pada saat yang sama, GoPRO HERO3 + diinstal sebagai kamera pada robot. Kami kesal dan berkecil hati dengan fakta ini, tapi itu benar-benar mustahil untuk mengontrol gambar, mengingat layar yang berkedip-kedip. Mungkin beberapa layar akan menghilangkan kelemahan ini. Beberapa pembuat robot, omong-omong, melengkapi produk mereka dengan kacamata VR.
Setelah faktanya, ketika mengunggah video dari kamera kamera, frustrasi kita menjadi lebih dalam: gambarnya, pada prinsipnya, sangat bagus, dan sangat mungkin untuk bekerja dengannya. Sayang sekali bahwa kami tidak melihat semua ini dalam proses!
Dan inilah sentuhan pertama bagian bawah dan elemen-elemen lanskap “bulan” pada kedalaman 13 meter:

Secara harfiah beberapa detik kemudian, setelah berlayar sedikit ke depan, perangkat itu menabrak batang kayu yang banjir, ditumbuhi cangkang kecil:

Pada kenyataannya, kualitas gambar sedikit lebih baik, tetapi saya harus mengambil tangkapan layar dari video yang diambil menggunakan GoPRO on-board.
Pada gambar berikut, jika Anda melihat lebih dekat, di sudut kanan atas Anda dapat melihat ikan pertama yang ditemui di jalan
pos penyaliban :

Dalam proses pengujian, kami belum tahu bahwa kamera sedang menulis gambar yang bagus dan terkadang sangat baik dan sangat bingung dengan perlunya mengontrol perangkat secara membabi buta.
Meskipun demikian, mereka memutuskan untuk tetap berpegang pada skenario yang telah ditentukan. Seharusnya membanjiri benda yang mudah terlihat dari kapal, menyimpan koordinat tempat ini dengan bantuan telepon GPS, dan kemudian mencoba datang ke tempat ini dengan robot, dipandu oleh indikasi sistem navigasi kami.
Karena teks biasanya dibaca secara diagonal tanpa memperhatikan detail, saya menyimpulkan bahwa dalam sistem ini dalam pemancar akustik pelampung, belitan transformator step-up harus terbuat dari kayu, sedangkan kayu EMF akan diinduksi di dalamnya dan arus kayu akan mengalir.
Di salah satu lorong di atas bagian bawah, kamera kamera menangkap jaring ikan yang tenggelam:
Pada titik ini, pemandangan yang kami dapatkan di bawah air dalam proses pengujian berakhir.
Siapa yang ingin mengevaluasi kualitas video dengan matanya sendiri, kami lampirkan tautan ke
salah satu rekaman di youtube . Catatan diberikan tanpa pemrosesan dan pengeditan. Mereka yang ingin secara mandiri dapat sampai pada kesimpulan tentang kenyamanan mengelola dan melakukan tindakan yang berarti di bawah air (misalnya, mencari sesuatu) hanya dengan gambar dari kamera, tanpa navigasi.
Kami sampai pada kesimpulan bahwa sama sekali tidak mungkin untuk mengontrol perangkat hanya menggunakan gambar; Pada dasarnya, kami hanya dipandu oleh sistem navigasi kami, yang secara online menunjukkan lokasi perangkat saat ini di peta.
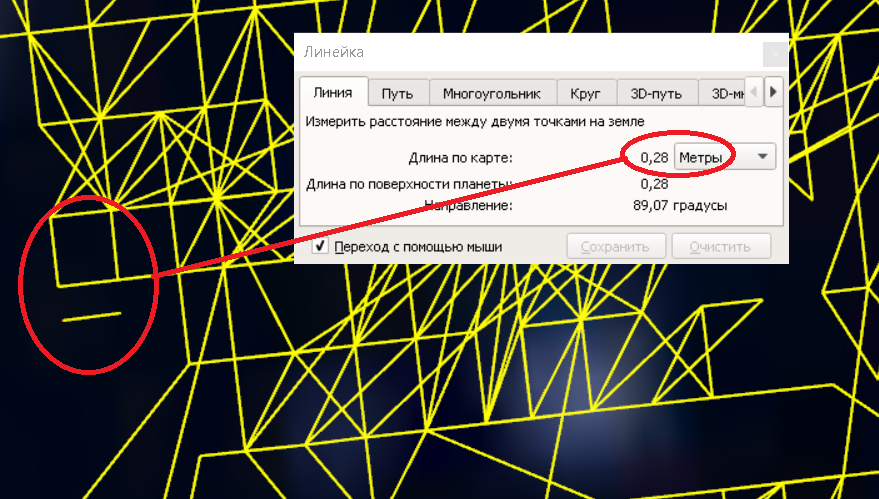
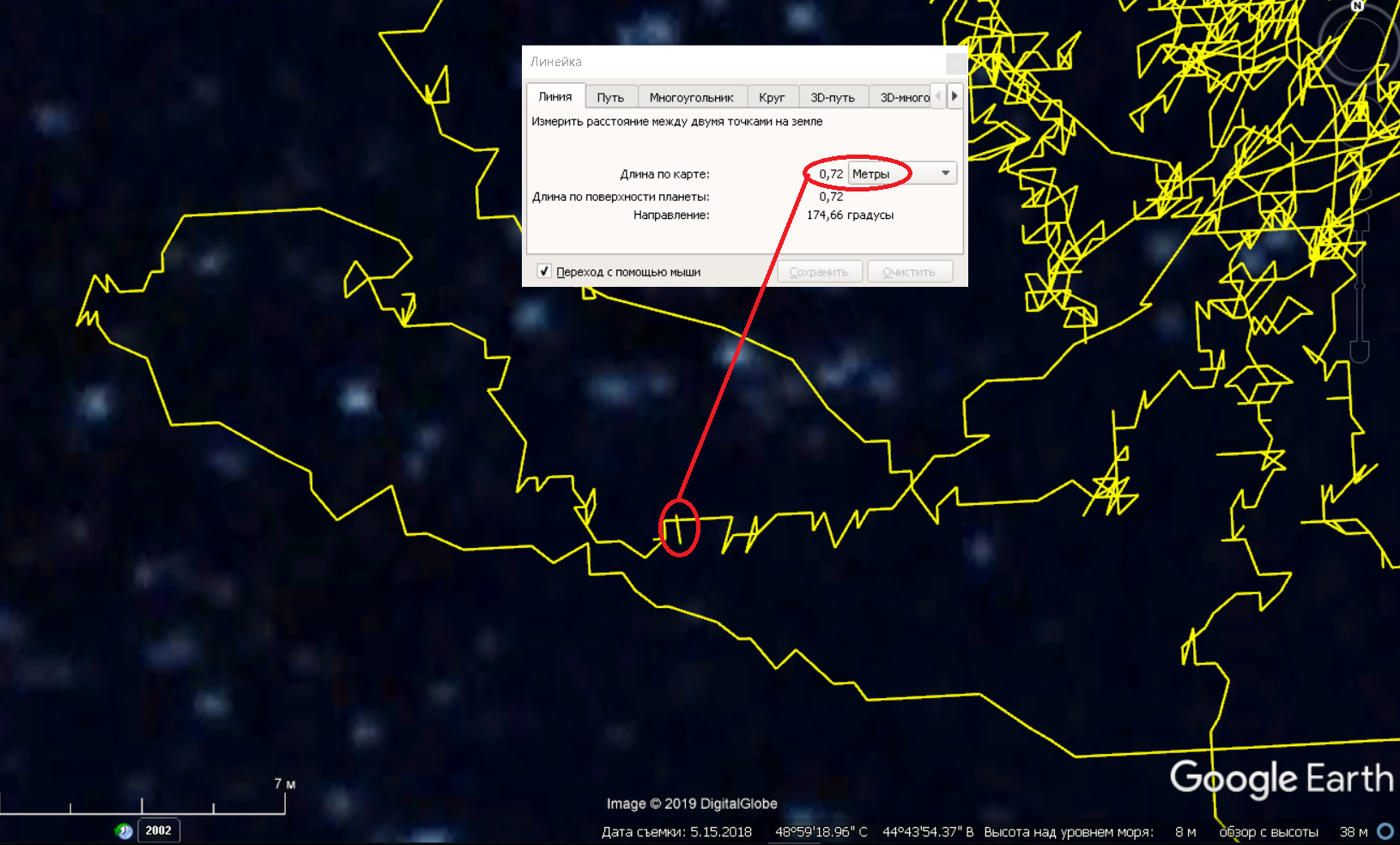
Resolusi sistem dalam reservoir nyata, yaitu sekitar 30 sentimeter, menyenangkan, seperti yang dapat dilihat dari grid yang ditarik oleh trek:
Seperti dalam kasus lain, penyebaran titik selama pergerakan terletak pada kisaran 1-1,5 meter:
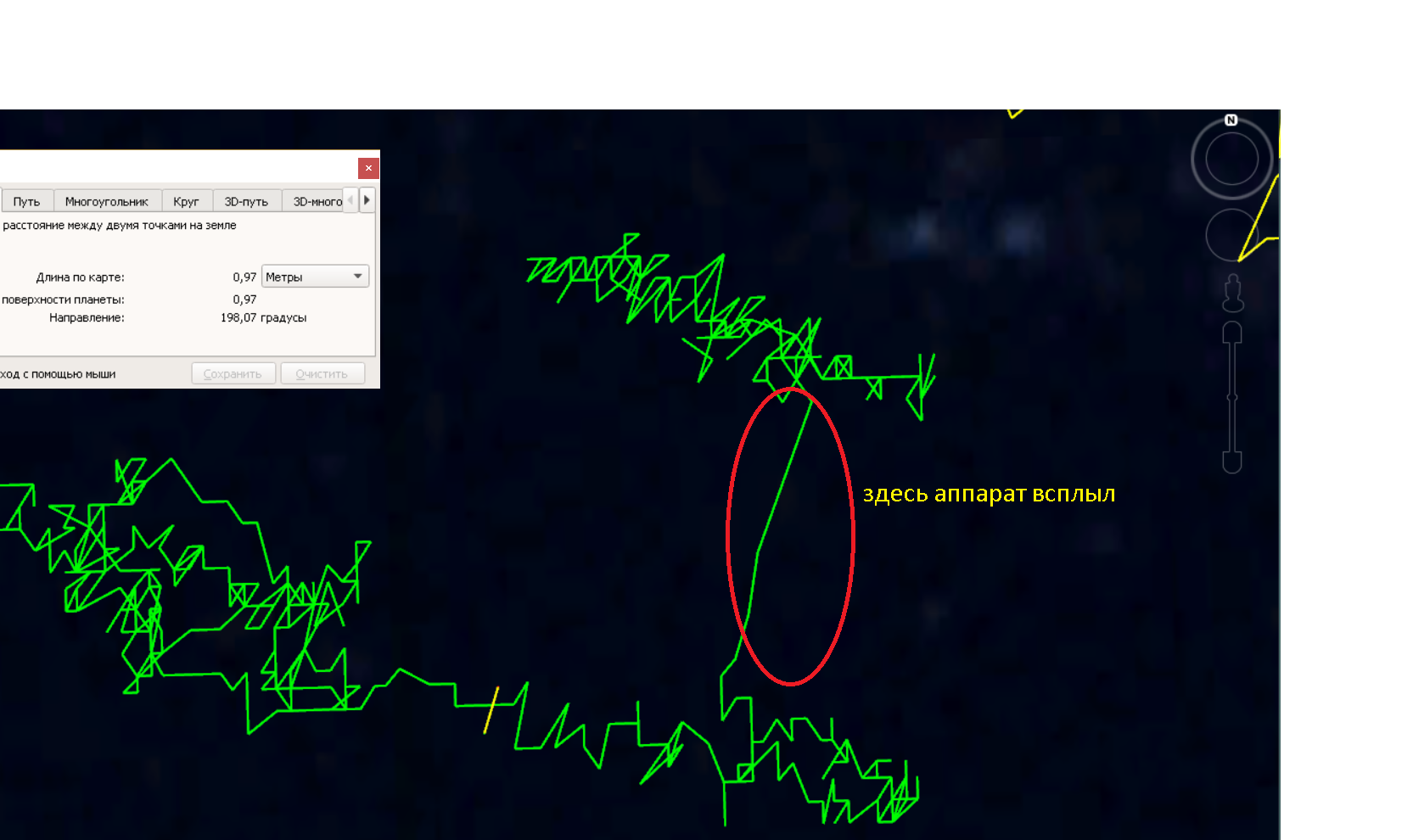
Lagu terakhir dari gerakan perangkat terlihat seperti ini:
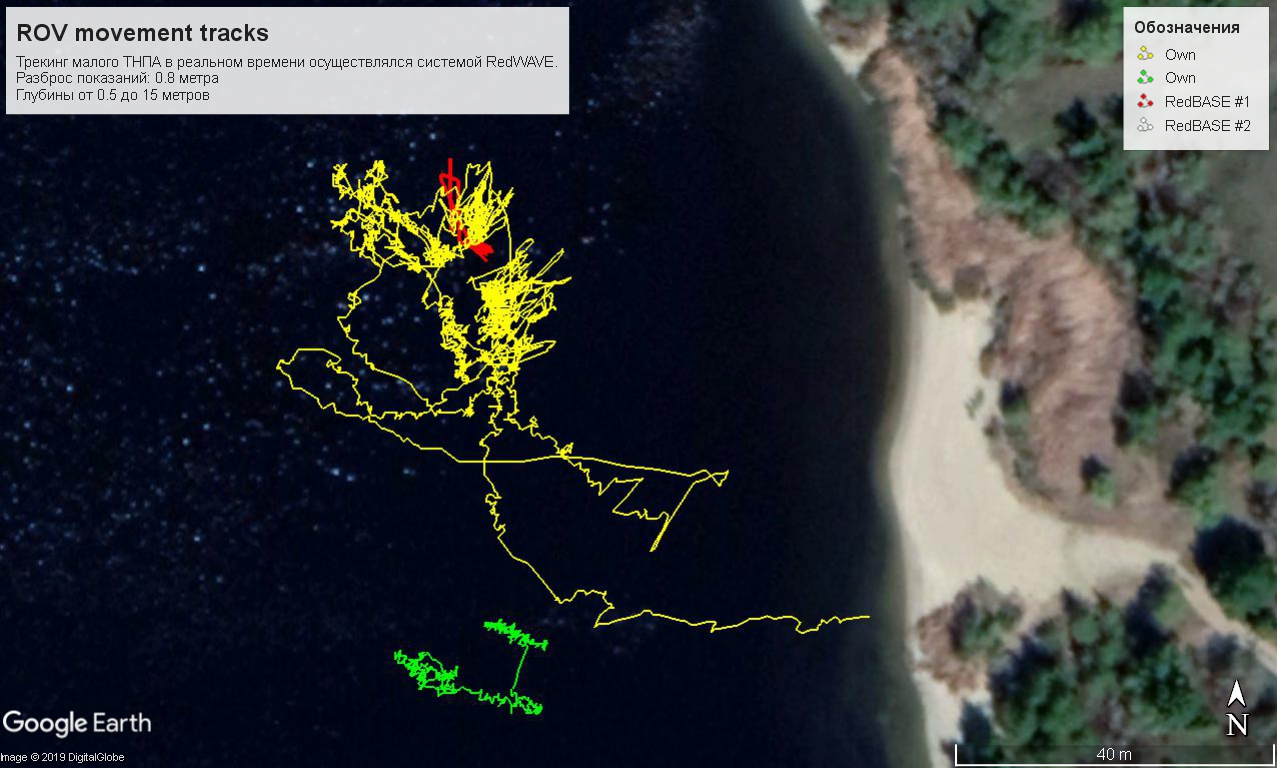
Terlepas dari kenyataan bahwa kami tidak menghitung tempat kerja sedikit dan hampir setengah dari trek (bagian kiri dari garis merah) terletak di luar pangkalan, mis. di luar angka pelampung, di mana sistem harus bekerja jauh lebih buruk. Namun, dengan pengecualian beberapa emisi, sistem bekerja dengan normal.
Dan di salah satu gang, perangkat itu sangat dekat dengan situs yang diusulkan untuk membanjiri objek:

Tapi dengan hati-hati menonton satu jam atau lebih dari video yang direkam oleh kamera on-board kendaraan, kami tidak pernah melihat objek yang diinginkan.
Mungkin ada beberapa alasan untuk ini: pertama, bagi kami, ini benar-benar pengalaman pertama mengendalikan perangkat di badan air yang nyata, dan kedua, layar silau membuat kami tidak memiliki kesempatan untuk "menonton" apa yang terjadi di air dekat perangkat online. Ketiga, perangkat itu bereaksi
keras, dengan ganas panik terhadap "putaran roda kemudi" dan sangat sulit untuk mengontrolnya dari posisi yang tidak biasa, bahkan sulit untuk mempertahankan gerakan langsung.
Untuk jaga-jaga, saya lampirkan
trek yang dihasilkan sehingga mereka yang tertarik sendiri dapat memutarnya.
Bawah
Sebagai kesimpulan, saya ingin mengatakan bahwa kita semua seperti batu yang jatuh dari jiwa - kita akhirnya menguji sistem untuk tujuan yang dimaksudkan.
Kami mendapat hasil yang sangat baik (dan pengalaman!), Mengontrol kendaraan bawah air, memasak sup jamur dengan arang, mengambil foto dan umumnya memiliki hari yang positif.Terima kasih atas perhatian Anda, seperti biasa, kami akan sangat berterima kasih atas umpan balik dan kritik yang membangun!UPD!
Kami mengumpulkan video pendek dengan beberapa penjelasan . Termasuk proses menampilkan lintasan perangkat secara real time di SAS.Planet