Jika Anda pernah menulis perangkat lunak untuk mengendalikan lengan robot atau mekanisme seperti robot secara umum dengan lebih dari tiga derajat kebebasan, Anda tahu bahwa sebagian besar waktu yang diperlukan untuk memprogram gerakan itu sendiri. Sekarang bayangkan Anda membuat lengan robot dengan menghubungkan tautan dan drive sesuka Anda, dan perangkat lunak menentukan panjang tautan, lokasi mereka, sudut rotasi, dan sebagainya.
Itulah yang dilakukan oleh para peneliti Columbia Research ketika
mereka menulis perangkat lunak yang
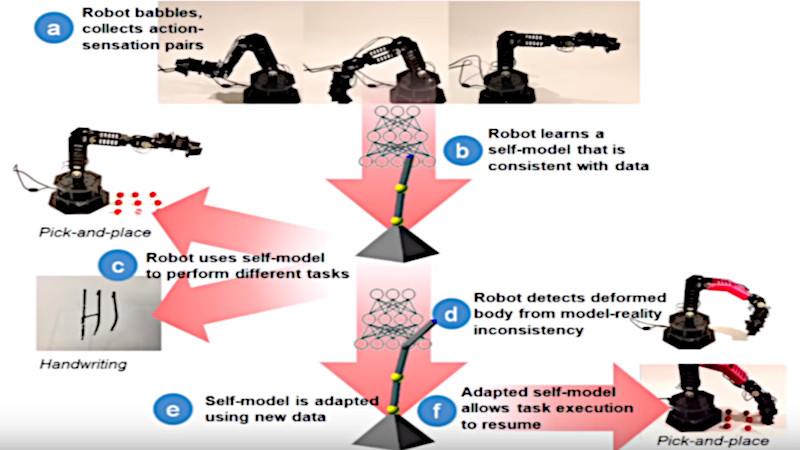
mempelajari cara mengatur lengan robot yang dikendalikan olehnya , tidak memiliki gagasan awal mengenai fisika, geometri, atau karakteristik mesin yang dinamis. Segera setelah peluncuran pertama, dia tidak tahu apa bentuk robot, bagaimana mesinnya bekerja, bagaimana dan apa yang masing-masing mempengaruhi. Selama sekitar satu setengah hari, pada awalnya membuat gerakan hati-hati yang tampak acak, dan menerima umpan balik tentang apa yang terjadi, perangkat lunak, menggunakan pembelajaran mendalam, mengkonfigurasi simulator yang dibangun di dalamnya sehingga robot virtual sebanyak mungkin fisik.
Manajer proyek Lipson dan mahasiswa pascasarjananya Robert Kwiatkowski sedang bereksperimen dengan lengan robot yang diartikulasikan dengan empat derajat kebebasan. Pada awal pelatihan perangkat lunak, modelnya tidak akurat, dan urutan menghubungkan tautan tidak ditentukan. Setelah 35 jam pelatihan, model tersebut sesuai dengan kenyataan dengan akurasi tidak lebih buruk dari empat sentimeter. Kemudian, perangkat lunak memaksa roboruk untuk mengambil dan memindahkan objek, sementara ada kalibrasi ulang tambahan setelah setiap gerakan sesuai dengan model yang hanya dibentuk oleh pelatihan independen.
Untuk menentukan apakah perangkat lunak tersebut dapat mendeteksi kerusakan pada lengan robor, yang serupa tetapi cacat khusus dicetak di tempat salah satu bagian. Perangkat lunak menentukan bahwa itu telah berubah dan membuat perubahan yang sesuai dengan model. Segera, itu melakukan tugas mengangkat dan memindahkan benda hanya sedikit lebih buruk.
Karena ide internal perangkat lunak tentang perangkat robot tidak statis, ini memungkinkan tidak hanya bertindak lebih baik dan lebih baik, tetapi juga untuk beradaptasi dengan kerusakan dan perubahan struktural. Selain itu, semuanya akan terus bekerja dengan keausan suku cadang secara bertahap dan penggantiannya dengan bentuk yang sedikit berbeda.
Tentu saja, roboruk yang dikelola oleh perangkat lunak seperti itu tidak akan segera menjadi seakurat
Dexter, roboruk dengan perangkat lunak tradisional yang memberikan hadiah kepada para pengembangnya di kompetisi Hackaday 2018 , tetapi menarik untuk melihat cara kerjanya: