Terjemahan dari bagian pertama presentasi Tesla Autonomy Investor Day tentang pengembangan Full Self-Driving Computer untuk Tesla autopilot. Kami mengisi kesenjangan antara ulasan tesis untuk presentasi dan isinya.Teks presentasi diterjemahkan dekat dengan aslinya. Pertanyaan untuk pembicara - selektif dengan singkatan.Tuan rumah: Halo semuanya. Maaf sudah terlambat. Selamat datang di hari pertama mengemudi mandiri. Saya harap kami bisa melakukan ini lebih teratur agar Anda selalu mendapat informasi terbaru tentang perkembangan kami.
Sekitar tiga bulan lalu, kami sedang mempersiapkan laporan pendapatan kuartal keempat dengan Ilon dan eksekutif lainnya. Saya kemudian mengatakan bahwa kesenjangan terbesar dalam percakapan dengan investor, antara apa yang saya lihat di dalam perusahaan dan apa persepsi eksternalnya, adalah kemajuan kita dalam mengemudi secara mandiri. Dan ini bisa dimengerti, selama beberapa tahun terakhir kita berbicara tentang peningkatan produksi Model 3, di mana ada banyak kontroversi. Bahkan, banyak yang telah terjadi di latar belakang.
Kami bekerja pada chip baru untuk autopilot, sepenuhnya mendesain ulang jaringan saraf visi mesin, dan akhirnya mulai merilis Full Self-Driving Computer (FSDC). Kami pikir itu adalah ide yang baik untuk hanya membuka tabir, mengundang semua orang dan menceritakan semua yang telah kami lakukan selama dua tahun terakhir.
Sekitar tiga tahun yang lalu kami ingin menggunakan, kami ingin menemukan chip terbaik untuk mengemudi mandiri. Kami menemukan bahwa tidak ada chip yang dirancang dari bawah ke atas untuk jaringan saraf. Oleh karena itu, kami mengundang rekan kerja saya Pete Bannon, wakil presiden desain sirkuit terintegrasi, untuk mengembangkan chip semacam itu bagi kami. Dia memiliki sekitar 35 tahun pengalaman dalam pengembangan chip. Termasuk 12 tahun di PASemi, yang kemudian diakuisisi oleh Apple. Dia bekerja pada banyak arsitektur dan implementasi yang berbeda, dan merupakan desainer kepala Apple iPhone 5, tak lama sebelum bergabung dengan Tesla. Juga bergabung dengan kami di Elon Musk. Terima kasih
Ilon: Sebenarnya, saya akan memperkenalkan Pete, tetapi karena mereka sudah melakukan ini, saya akan menambahkan bahwa dia hanyalah sistem terbaik dan arsitek sirkuit terintegrasi di dunia yang saya tahu. Merupakan suatu kehormatan bagi Anda dan tim Anda di Tesla. Tolong beri tahu kami tentang pekerjaan luar biasa yang telah Anda lakukan.
Pete: Terima kasih Ilon. Saya senang berada di sini pagi ini dan sangat menyenangkan untuk memberi tahu Anda tentang semua pekerjaan yang telah saya dan rekan saya lakukan di sini di Tesla selama tiga tahun terakhir. Saya akan memberi tahu Anda sedikit tentang bagaimana semuanya dimulai, dan kemudian saya akan memperkenalkan Anda ke komputer FSDC dan memberi tahu Anda sedikit cara kerjanya. Kami akan menyelidiki chip itu sendiri dan mempertimbangkan beberapa detail. Saya akan menjelaskan bagaimana akselerator jaringan saraf khusus yang kami desain bekerja dan kemudian menunjukkan beberapa hasil, dan saya berharap bahwa pada saat itu Anda belum akan tertidur.
Saya dipekerjakan pada Februari 2016. Saya bertanya kepada Ilon apakah dia siap untuk menghabiskan sebanyak yang diperlukan untuk menciptakan sistem khusus ini, dia bertanya: "Apakah kita akan menang?" . Kami mempekerjakan sekelompok orang dan mulai berpikir tentang seperti apa bentuk chip yang dirancang khusus untuk mengemudi sepenuhnya otonom. Kami menghabiskan delapan belas bulan mengembangkan versi pertama, dan pada Agustus 2017 merilisnya untuk produksi. Kami mendapat chip pada bulan Desember, itu bekerja, dan benar-benar bekerja dengan sangat baik pada percobaan pertama. Pada bulan April 2018, kami membuat beberapa perubahan dan merilis versi B nol Rev. Pada bulan Juli 2018, chip tersebut disertifikasi, dan kami memulai produksi skala penuh. Pada bulan Desember 2018, tumpukan mengemudi otonom diluncurkan pada peralatan baru, dan kami dapat melanjutkan dengan konversi mobil perusahaan dan pengujian di dunia nyata. Pada Maret 2019 kami mulai memasang komputer baru dalam model S dan X, dan pada bulan April - dalam Model 3.
Jadi, keseluruhan program, dari mempekerjakan karyawan pertama hingga peluncuran penuh di ketiga model mobil kami, membutuhkan waktu lebih dari tiga tahun. Ini mungkin program pengembangan sistem tercepat yang pernah saya ikuti. Dan itu benar-benar berbicara tentang manfaat integrasi vertikal yang tinggi, memungkinkan Anda untuk melakukan desain paralel dan mempercepat penyebaran.
Dalam hal tujuan, kami sepenuhnya berfokus hanya pada persyaratan Tesla, dan ini sangat menyederhanakan kehidupan. Jika Anda memiliki satu pelanggan tunggal, Anda tidak perlu khawatir tentang orang lain. Salah satu tujuannya adalah untuk menjaga daya di bawah 100 watt sehingga kami dapat mengkonversi mesin yang ada. Kami juga ingin menurunkan biaya untuk menyediakan redundansi untuk keamanan yang lebih besar.
Pada saat kami menjulurkan jari ke langit, saya berpendapat bahwa mengendarai mobil akan memerlukan kinerja jaringan saraf setidaknya 50 triliun operasi per detik. Karena itu, kami ingin mendapatkan setidaknya, dan lebih baik, lebih banyak. Ukuran kumpulan menentukan jumlah item yang Anda kerjakan secara bersamaan. Misalnya, Google TPU memiliki ukuran paket 256, dan Anda harus menunggu hingga Anda memiliki 256 item untuk diproses sebelum Anda bisa memulai. Kami tidak ingin menunggu dan mengembangkan mesin kami dengan ukuran satu paket. Segera setelah gambar muncul, kami segera memprosesnya untuk meminimalkan penundaan dan meningkatkan keamanan.
Kami membutuhkan prosesor grafis untuk melakukan beberapa post-processing. Pada awalnya, ini cukup banyak digunakan, tetapi kami mengasumsikan bahwa seiring waktu akan menjadi lebih kecil, karena jaringan saraf semakin baik. Dan itu benar-benar terjadi. Kami mengambil risiko dengan menempatkan prosesor grafis yang agak sederhana dalam desain, dan itu ternyata ide yang bagus.
Keamanan sangat penting, jika Anda tidak memiliki mobil yang dilindungi, Anda tidak dapat memiliki mobil yang aman. Oleh karena itu, banyak perhatian diberikan pada keamanan dan, tentu saja, keamanan.
Dalam hal arsitektur chip, seperti yang disebutkan Ilon sebelumnya, pada tahun 2016 tidak ada akselerator yang awalnya dibuat untuk jaringan saraf. Semua orang hanya menambahkan instruksi ke CPU, GPU atau DSP mereka. Tidak ada yang melakukan pengembangan dengan 0. Oleh karena itu, kami memutuskan untuk melakukannya sendiri. Untuk komponen lain, kami membeli CPU dan GPU industri IP standar, yang memungkinkan kami untuk mengurangi waktu pengembangan dan risiko.
Hal lain yang agak tidak terduga bagi saya adalah kemampuan untuk menggunakan perintah yang ada di Tesla. Tesla memiliki tim pengembang catu daya yang sangat baik, analisis integritas sinyal, desain perumahan, firmware, perangkat lunak sistem, pengembangan papan sirkuit, dan program validasi sistem yang sangat baik. Kami dapat menggunakan semua ini untuk mempercepat program.

Ini adalah tampilannya. Di sebelah kanan Anda melihat konektor untuk video yang berasal dari kamera mobil. Dua komputer penggerak otonom di tengah papan, di sebelah kiri - catu daya dan konektor kontrol. Saya suka ketika solusi turun ke elemen dasarnya. Anda memiliki video, komputer dan daya, sederhana dan jelas. Berikut ini adalah solusi Hardware 2.5 sebelumnya, yang termasuk komputer, dan yang kami instal dua tahun terakhir. Ini adalah desain baru untuk komputer FSD. Mereka sangat mirip. Ini, tentu saja, disebabkan oleh keterbatasan program modernisasi mobil. Saya ingin menunjukkan bahwa ini sebenarnya komputer yang agak kecil. Itu ditempatkan di belakang kompartemen sarung tangan, dan tidak menempati setengah dari bagasi.
Seperti yang saya katakan sebelumnya, ada dua komputer yang sepenuhnya independen di papan tulis. Mereka disorot dalam warna biru dan hijau. Di sisi masing-masing SoC Anda dapat melihat chip DRAM. Di kiri bawah Anda melihat chip FLASH yang mewakili sistem file. Ada dua komputer independen yang melakukan boot dan berjalan di bawah sistem operasi mereka sendiri.
Ilon: Prinsip umumnya adalah jika ada bagian yang gagal, mesin dapat terus bergerak. Kamera, sirkuit daya, salah satu chip komputer Tesla gagal - mesin terus bergerak. Kemungkinan kegagalan komputer ini secara signifikan lebih rendah daripada kemungkinan bahwa pengemudi akan kehilangan kesadaran. Ini adalah indikator utama, setidaknya urutan besarnya.
Pete: Ya, jadi salah satu hal yang kami lakukan untuk menjaga komputer tetap berjalan adalah catu daya yang berlebihan. Chip pertama berjalan pada satu sumber daya, dan yang kedua pada yang lain. Hal yang sama berlaku untuk kamera, setengah dari kamera pada catu daya ditandai dengan warna biru, separuh lainnya pada warna hijau. Kedua chip menerima semua video dan memprosesnya secara independen.
Dari sudut pandang mengemudi, urutannya adalah untuk mengumpulkan banyak informasi dari dunia di sekitar Anda, kami tidak hanya memiliki kamera, tetapi juga radar, GPS, peta, gyro stabilizer (IMU), sensor ultrasonik di sekitar mobil. Kami memiliki sudut kemudi, kami tahu seperti apa akselerasi mobil seharusnya. Semua ini bersatu untuk membentuk rencana. Ketika paket sudah siap, kedua komputer bertukar versi paket mereka untuk memastikan mereka cocok.
Dengan asumsi rencananya sama, kami mengeluarkan sinyal kontrol dan drive. Sekarang Anda bergerak dengan kontrol baru, Anda tentu ingin mengujinya. Kami memverifikasi bahwa sinyal kontrol yang dikirimkan sesuai dengan apa yang kami maksudkan untuk dikirim ke aktuator di dalam mobil. Sensor digunakan untuk memverifikasi bahwa kontrol benar-benar terjadi. Jika Anda meminta mobil untuk mempercepat, atau memperlambat, atau berbelok ke kanan atau kiri, Anda dapat melihat accelerometer dan memastikan bahwa ini benar-benar terjadi. Ada redundansi dan duplikasi signifikan pada data kami dan kemampuan pemantauan data kami.
Mari kita bicara tentang chip. Dikemas dalam BGA 37,5 mm dengan 1600 pin, yang sebagian besar adalah daya dan ground. Jika Anda melepas penutup, Anda dapat melihat media dan kristal di bagian tengah. Jika Anda memisahkan kristal dan membaliknya, Anda akan melihat 13.000 tonjolan C4 tersebar di permukaan. Di bawah ini adalah dua belas lapisan logam dari sirkuit terintegrasi. Ini adalah proses CMOS FinFET 14-nanometer berukuran 260 mm, sirkuit kecil. Sebagai perbandingan, chip ponsel konvensional adalah sekitar 100 mm2. Prosesor grafis berkinerja tinggi sekitar 600-800 mm.kv. Jadi kita ada di tengah. Saya akan menyebutnya emas berarti, ini adalah ukuran yang nyaman untuk perakitan. Ada 250 juta elemen logika dan 6 miliar transistor, yang, meskipun saya telah kerjakan selama ini, membuat saya takjub. Chip ini diproduksi dan diuji sesuai dengan standar otomotif AEC Q100.
Saya hanya akan berkeliling chip dan menjelaskan semua bagiannya. Saya akan pergi dalam urutan yang sama dengan piksel yang berasal dari kamera. Di sudut kiri atas Anda dapat melihat antarmuka kamera. Kami dapat mengambil 2,5 miliar piksel per detik, yang lebih dari cukup untuk semua sensor yang tersedia. Jaringan yang mendistribusikan data dari sistem memori ke pengontrol memori di tepi kanan dan kiri chip. Kami menggunakan operasi LPDDR4 standar pada kecepatan 4266 gigabit per detik. Ini memberi kami throughput maksimum 68 gigabytes per detik. Ini adalah bandwidth yang cukup bagus, tetapi tidak berlebihan, kami mencoba untuk tetap berada di jalan tengah. Prosesor gambar memiliki pipa internal 24-bit, yang memungkinkan kita untuk sepenuhnya menggunakan sensor HDR yang ada di dalam mobil. Ini melakukan pemetaan Nada tingkat lanjut, yang membantu menyoroti detail dan bayangan lebih baik, dan juga melakukan pengurangan noise tingkat lanjut, yang hanya meningkatkan kualitas keseluruhan gambar yang kami gunakan dalam jaringan saraf.
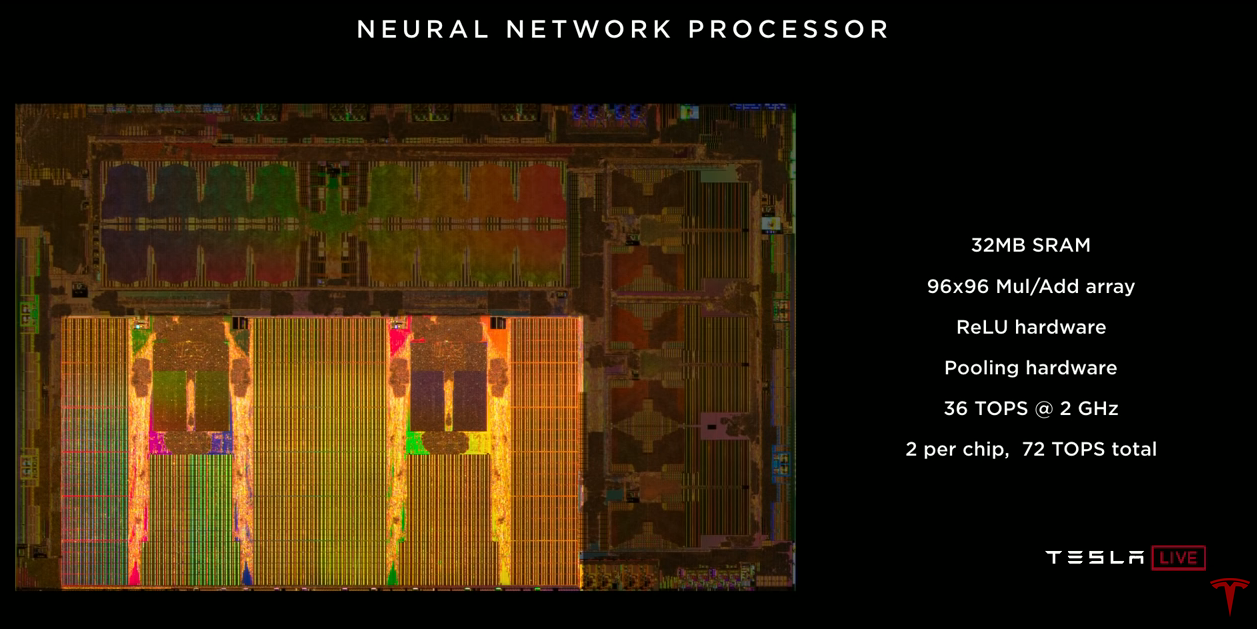
Akselerator jaringan saraf itu sendiri. Ada dua chip. Masing-masing memiliki 32 megabita SRAM untuk menyimpan hasil sementara. Ini meminimalkan jumlah data yang perlu kita transfer ke chip dan sebaliknya, yang membantu mengurangi konsumsi daya. Masing-masing berisi larik pengganda 96x96 dengan akumulasi, yang memungkinkan kami melakukan hampir 10.000 operasi MUL / ADD per siklus. Ada akselerator ReLU khusus, akselerator penyatuan. Masing-masing dari mereka menyediakan 36 triliun operasi per detik yang beroperasi pada frekuensi 2 GHz. Dua akselerator pada sebuah chip memberikan operasi 72 triliun per detik, yang secara nyata lebih tinggi dari target 50 triliun.
Encoder video, video yang kami gunakan di mobil untuk banyak tugas, termasuk mengeluarkan gambar dari kamera tampak belakang, merekam video, serta untuk merekam data ke cloud, Stuart dan Andrew akan membicarakan hal ini nanti. Prosesor grafis yang agak sederhana terletak pada chip. Ini mendukung angka floating point 32 dan 16 bit. Juga 12 prosesor A72 serba guna 64-bit. Mereka beroperasi pada frekuensi 2,2 GHz, yang kira-kira 2,5 kali lebih tinggi dari kinerja solusi sebelumnya. Sistem keamanan berisi dua prosesor yang beroperasi dalam mode berbaris. Sistem ini membuat keputusan akhir apakah aman untuk mengirimkan sinyal kontrol ke drive kendaraan. Di sinilah kedua pesawat bersatu, dan kami memutuskan apakah aman untuk bergerak maju. Dan akhirnya, sebuah sistem keamanan yang tugasnya memastikan bahwa hanya chip perangkat lunak Tesla yang ditandatangani secara kriptografi yang digunakan pada chip ini.
Saya katakan banyak indikator kinerja yang berbeda, dan saya pikir akan berguna untuk melihat masa depan. Kami akan mempertimbangkan jaringan saraf dari kamera kami (sempit). Dibutuhkan 35 miliar operasi. Jika kita menggunakan 12 CPU untuk memproses jaringan ini, kita bisa melakukan 1,5 frame per detik, ini sangat lambat. Sama sekali tidak cukup untuk mengendarai mobil. Jika kami menggunakan GPU dengan 600 GFLOP untuk jaringan yang sama, kami akan mendapatkan 17 frame per detik, yang masih belum cukup untuk mengendarai mobil dengan 8 kamera. Akselerator jaringan saraf kami dapat menghasilkan 2100 frame per detik. Anda dapat melihat bahwa jumlah komputasi dalam CPU dan GPU dapat diabaikan dibandingkan dengan akselerator jaringan saraf.
Mari kita beralih ke berbicara tentang akselerator jaringan saraf. Saya hanya akan minum air. Di sebelah kiri di sini adalah gambar jaringan saraf untuk memberi Anda gambaran tentang apa yang sedang terjadi. Data tiba di atas dan melewati masing-masing blok. Data ditransmisikan di sepanjang panah ke berbagai blok, yang biasanya berbelit-belit atau berbelit-belit dengan fungsi aktivasi (ReLUs). Blok hijau menggabungkan lapisan. Adalah penting bahwa data yang diterima oleh satu blok kemudian digunakan oleh blok berikutnya, dan Anda tidak lagi membutuhkannya - Anda dapat membuangnya. Jadi semua data sementara ini dibuat dan dimusnahkan ketika melewati jaringan. Tidak perlu menyimpannya di luar chip dalam DRAM. Karena itu, kami hanya menyimpannya di SRAM, dan dalam beberapa menit saya akan menjelaskan mengapa ini sangat penting.
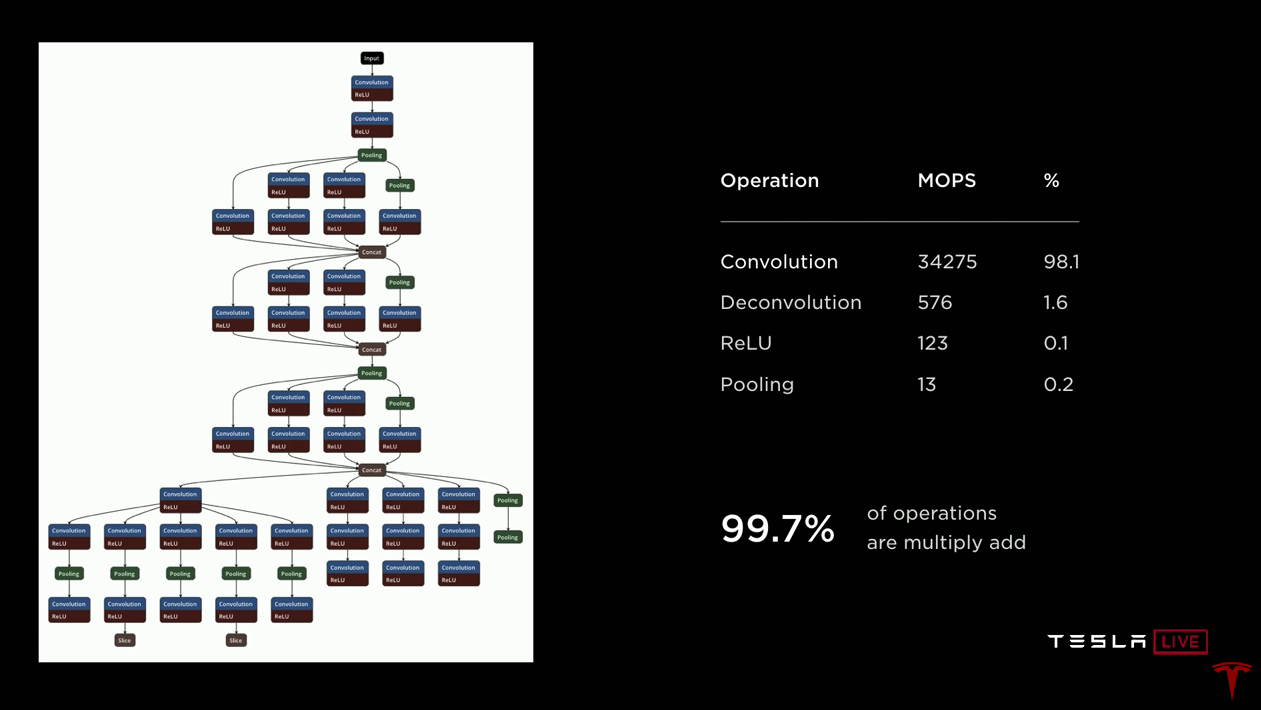
Jika Anda melihat sisi kanan, Anda akan melihat bahwa dalam jaringan 35 miliar operasi ini, hampir semua adalah konvolusi, pada dasarnya produk skalar, sisanya adalah dekonvolusi (konvolusi balik), juga didasarkan pada produk skalar, dan kemudian ReLU dan pooling relatif sederhana operasi. Karena itu, jika Anda mengembangkan akselerator, Anda fokus pada penerapan produk skalar berdasarkan penambahan dengan akumulasi dan mengoptimalkannya. Tetapi bayangkan Anda mempercepat operasi ini sebanyak 10.000 kali dan 100% berubah menjadi 0,1%. Tiba-tiba, operasi ReLU dan pooling menjadi sangat signifikan. Oleh karena itu, implementasi kami mencakup akselerator khusus untuk pemrosesan dan pengumpulan ReLU.
Chip beroperasi dalam anggaran panas terbatas. Kami harus sangat berhati-hati tentang bagaimana kami membakar tenaga. Kami ingin memaksimalkan jumlah aritmatika yang bisa kami lakukan. Oleh karena itu, kami memilih penambahan integer 32 bit, yang mengkonsumsi energi 9 kali lebih sedikit daripada penambahan floating point. Dan kami memilih perkalian bilangan bulat 8-bit, yang juga mengkonsumsi energi secara signifikan lebih sedikit daripada operasi perkalian lainnya, dan mungkin memiliki akurasi yang cukup untuk mendapatkan hasil yang baik. Adapun ingatannya. Mengakses DRAM eksternal sekitar seratus kali lebih mahal dalam hal konsumsi daya daripada menggunakan SRAM lokal. Jelas bahwa kami ingin memaksimalkan SRAM lokal.
Dari sudut pandang manajemen, berikut adalah data yang diterbitkan dalam sebuah artikel oleh Mark Horowitz, di mana ia secara kritis memeriksa berapa banyak energi yang diperlukan untuk menjalankan satu instruksi pada prosesor integer biasa. Dan Anda melihat bahwa operasi penambahan hanya mengkonsumsi 0,15% dari total daya. Yang lainnya adalah overhead untuk manajemen dan banyak lagi. Oleh karena itu, dalam desain kami, kami berusaha keras untuk menyingkirkan semua ini sebanyak mungkin. Yang benar-benar menarik bagi kita adalah aritmatika.

Jadi inilah desain yang sudah kami selesaikan. Anda dapat melihat bahwa di dalamnya tempat utama ditempati oleh 32 megabita SRAM, mereka berada di kiri, kanan, di tengah dan di bawah. Semua perhitungan dilakukan di bagian tengah atas.
Setiap siklus, kita membaca 256 byte data aktivasi dari array SRAM, 128 byte bobot dari array SRAM dan menggabungkannya dalam array 96x96, yang melakukan 9000 penambahan dengan akumulasi per siklus pada 2 GHz. Ini hanya 36,8 triliun. operasi. Sekarang kita sudah selesai dengan produk skalar, kita mengunggah data, meneruskannya melalui ReLU khusus, secara opsional melalui penarikan, dan akhirnya memasukkannya ke dalam buffer tulis, di mana semua hasil digabungkan. Dan kemudian kita menulis 128 byte per jam kembali ke SRAM. Dan semua ini terjadi terus menerus. Kami bekerja dengan produk skalar, sementara kami membongkar hasil sebelumnya, melakukan menarik dan menulis hasilnya kembali ke memori. Jika Anda menumpuk semuanya pada 2 GHz, Anda akan membutuhkan 1 terabyte per detik dari bandwidth SRAM untuk mendukung operasi. Dan besi menyediakan ini.Satu terabyte per detik bandwidth per akselerator, dua akselerator per chip - dua terabyte per detik.Akselerator memiliki seperangkat perintah yang relatif kecil. Ada operasi baca DMA untuk memuat data dari memori, operasi penulisan DMA untuk mengunggah hasil kembali ke memori. Tiga instruksi konvolusi (konvolusi, dekonvolusi, produk dalam). Dua operasi yang relatif sederhana adalah operasi shift dan elementwise (eltwise). Dan tentu saja, operasi berhenti ketika perhitungan selesai.Kami harus mengembangkan kompiler jaringan saraf. Kami mengambil jaringan saraf yang dilatih oleh tim pengembangan kami, dalam bentuk yang digunakan dalam perangkat keras lama. Ketika Anda mengkompilasinya untuk digunakan pada akselerator baru, kompiler melakukan fusi lapisan, yang memungkinkan kami untuk meningkatkan jumlah perhitungan untuk setiap panggilan ke SRAM. Ini juga melakukan perataan akses memori. Kami melakukan bantalan saluran untuk mengurangi konflik antar bank memori. Alokasi memori juga memperhitungkan bank SRAM. Ini adalah kasus ketika pemrosesan konflik dapat diimplementasikan dalam perangkat keras. Tetapi dengan implementasi perangkat lunak, kami menghemat perangkat keras karena beberapa kompleksitas perangkat lunak. Kami juga secara otomatis memasukkan operasi DMA sehingga data tiba untuk perhitungan tepat waktu, tanpa menghentikan pemrosesan. Pada akhirnya, kami menghasilkan kode,bobot data, kompres, dan tambahkan checksum CRC untuk keandalan. Jaringan saraf dimuat ke SRAM saat startup dan ada di sana sepanjang waktu.Jadi, untuk memulai jaringan, Anda menentukan alamat buffer input, yang berisi gambar baru yang baru saja tiba dari kamera; mengatur alamat buffer output; atur pointer ke berat jaringan; ayo pergi. Akselerator “masuk ke dalam dirinya sendiri” dan secara berurutan akan melewati seluruh jaringan saraf, biasanya untuk satu atau dua juta siklus clock. Setelah selesai, Anda menerima interupsi dan dapat memposting proses.Beralih ke hasilnya. Tujuan kami adalah untuk memenuhi 100 watt. Pengukuran pada mobil yang mengendarai dengan setumpuk autopilot penuh telah menunjukkan bahwa kami menghamburkan daya 72 watt. Ini sedikit lebih besar dari pada proyek sebelumnya, tetapi peningkatan kinerja yang signifikan adalah alasan yang bagus. Dari 72 watt ini, sekitar 15 watt dikonsumsi dalam jaringan saraf. Biaya solusi ini adalah sekitar 80% dari yang kami bayar sebelumnya. Dalam hal kinerja, kami mengambil jaringan syaraf (sempit) kamera, yang telah saya sebutkan, dengan 35 miliar operasi, kami meluncurkannya pada peralatan lama dan menerima 110 frame per detik. Kami mengambil data yang sama dan jaringan yang sama, mengkompilasinya untuk komputer FSD yang baru dan, menggunakan keempat akselerator, kami dapat memproses 2.300 frame per detik.Ilon:Saya pikir ini mungkin slidePete yang paling signifikan : Saya belum pernah bekerja pada proyek di mana peningkatan produktivitas lebih dari 3. Jadi itu cukup menyenangkan. Dibandingkan dengan solusi nvidia Drive Xavier, chip yang ada menyediakan 21 triliun. operasi, sedangkan FSDC kami dengan dua chip - 144 triliun. operasi.Jadi, sebagai kesimpulan, saya pikir kami telah menciptakan solusi yang memberikan kinerja luar biasa dari 144 triliun. operasi untuk memproses jaringan saraf. Ini memiliki karakteristik kekuatan yang luar biasa. Kami berhasil memasukkan semua produktivitas ini ke dalam anggaran panas yang kami miliki. Ini memungkinkan Anda untuk menerapkan solusi duplikasi. Komputer memiliki biaya yang moderat, dan apa yang benar-benar penting, FSDC akan memberikan tingkat keselamatan dan otonomi baru pada mobil Tesla, tanpa memengaruhi biaya dan jarak tempuh mereka. Kita semua menantikannya.Ilon: Jika Anda memiliki pertanyaan tentang peralatan, tanyakan pada mereka sekarang.Alasan saya meminta Pete untuk melakukan perincian, jauh lebih mendetail daripada mungkin kebanyakan orang akan menghargai menyelam ke komputer Tesla FSD adalah sebagai berikut. Sepintas rasanya luar biasa bagaimana hal itu bisa terjadi bahwa Tesla, yang belum pernah merancang chip seperti itu sebelumnya, menciptakan chip terbaik di dunia. Tapi inilah yang terjadi. Dan bukan hanya yang terbaik dengan selisih kecil, tetapi yang terbaik dengan selisih besar. Semua Tesla yang diproduksi sekarang memiliki komputer ini. Kami beralih dari solusi Nvidia untuk S dan X sekitar sebulan yang lalu dan mengganti Model 3 sekitar sepuluh hari yang lalu. Semua mobil yang diproduksi memiliki semua perangkat keras yang diperlukan dan semua yang diperlukan untuk mengemudi sepenuhnya otonom. Saya akan mengatakannya lagi: semua mobil Tesla diproduksi sekarang,memiliki semua yang Anda butuhkan untuk mengemudi otonom penuh. Yang harus Anda lakukan adalah meningkatkan perangkat lunak. Kemudian hari ini, Anda dapat mengendarai mobil dengan versi untuk pengembang perangkat lunak mengemudi otonom yang lebih baik. Anda akan melihatnya sendiri. PertanyaanT: apakah Anda memiliki kemampuan untuk menggunakan fungsi aktivasi selain ReLU?Pete: ya, kami memiliki sigmoid, misalnyaT: mungkin layak beralih ke proses manufaktur yang lebih ringkas, mungkin 10 nm atau 7 nm?Pete: pada saat kami mulai mendesain, tidak semua IP yang kami inginkan tersedia dalam 10 nmIlon: perlu dicatat bahwa kami menyelesaikan desain ini sekitar satu setengah tahun yang lalu dan mulai generasi berikutnya. Hari ini kita tidak berbicara tentang generasi berikutnya, tetapi kita sudah setengah jalan. Semua itu jelas untuk chip generasi berikutnya, kami lakukan.T: Komputer dirancang untuk bekerja dengan kamera. Bisakah saya menggunakannya dengan LIDAR?Ilon:Lidar adalah keputusan yang gagal, dan siapa pun yang bergantung pada lidar akan dikutuk. Kiamat. Mahal Sensor sayang yang tidak dibutuhkan. Ini seperti memiliki banyak aplikasi mahal yang tidak perlu. Satu yang kecil bukan apa-apa, tetapi banyak sudah menjadi mimpi buruk. Ini bodoh, Anda akan lihat.T: Dapatkah Anda menilai dampak konsumsi energi pada jarak tempuh?Pete: Untuk Model 3, konsumsi target adalah 250 watt per mil.Ilon:Tergantung pada sifat mengemudi. Di kota, efeknya akan jauh lebih besar daripada di jalan raya. Anda berkendara di kota selama satu jam dan Anda memiliki solusi hipotetis yang menghabiskan 1 kW. Anda akan kehilangan 6km pada Model 3. Jika kecepatan rata-rata adalah 25km / jam, maka Anda kehilangan 25%. Konsumsi sistem memiliki dampak besar pada jarak tempuh di kota di mana kami pikir akan ada sebagian besar pasar robotax, jadi listrik sangat penting.T: Seberapa andalkah teknologi Anda dalam hal IP, apakah Anda tidak akan membagikan IP secara gratis?Pete: Kami telah mengajukan selusin paten untuk teknologi ini. Ini pada dasarnya adalah aljabar linier, yang saya pikir Anda tidak dapat mematenkan. (Ilon tertawa)T:sirkuit mikro Anda dapat melakukan sesuatu, mungkin mengenkripsi semua bobot sehingga kekayaan intelektual Anda tetap di dalam, dan tidak ada yang bisa mencurinyaIlon: Oh, saya ingin bertemu seseorang yang bisa melakukan ini. Saya akan mempekerjakannya dalam sekejap. Ini adalah masalah yang sangat sulit. Bahkan jika Anda dapat mengekstrak data, Anda akan membutuhkan sejumlah besar sumber daya untuk menggunakannya.Keuntungan besar yang berkelanjutan bagi kami adalah armada. Tidak ada yang punya armada. Bobot terus diperbarui dan ditingkatkan berdasarkan miliaran mil yang ditempuh. Tesla memiliki mobil seratus kali lebih banyak dengan perangkat keras yang diperlukan untuk pelatihan daripada yang lainnya digabungkan. Pada akhir kuartal ini, kami akan memiliki 500.000 kendaraan dengan 8 kamera dan 12 sensor ultrasonik. Dalam setahun kami akan memiliki lebih dari satu juta mobil dengan FSDC. Ini hanyalah keuntungan data yang sangat besar. Ini mirip dengan bagaimana mesin pencari Google memiliki keuntungan besar, karena orang menggunakannya, dan orang benar-benar melatih Google dengan pertanyaan mereka.Tuan rumah:Satu hal yang perlu diingat tentang komputer FSD kami adalah ia dapat bekerja dengan jaringan saraf yang jauh lebih kompleks untuk pengenalan gambar yang jauh lebih akurat. Sudah waktunya untuk berbicara tentang bagaimana kita benar-benar mendapatkan gambar-gambar ini dan bagaimana kita menganalisisnya. Di sini kami memiliki direktur senior AI - Andrey Karpaty, yang akan menjelaskan semua ini kepada Anda. Andrei adalah PhD dari Stanford University, di mana ia belajar ilmu komputer dengan penekanan pada pengakuan dan pembelajaran yang mendalam.Ilon: Andrey, mengapa Anda tidak memulai saja, ayolah. Banyak dokter keluar dari Stanford, itu tidak masalah. Andrey mengajar kursus visi komputer di Stanford, yang jauh lebih penting. Tolong beritahu tentang dirimu.
(Terjemahan ternyata bukan masalah yang cepat, saya tidak tahu apakah saya memiliki cukup untuk bagian kedua tentang sistem pelatihan jaringan saraf, meskipun menurut saya yang paling menarik.)