Hai, Habr. Pada artikel ini saya akan berbicara tentang robot merangkak terkontrol sederhana yang terbuat dari CD-drive lama. Saya hanya ingin menyampaikan ide, bukan desain tertentu, sehingga setiap orang dapat membuat sesuatu yang mirip dengan detail yang tersedia jika mereka mau. Artikel ini memiliki banyak gambar ringan dan tiga gif berukuran 25 MB.
Jika seseorang lebih suka menonton video,
inilah video tentang robot ini .
Banyak penggemar elektronik berpikir tentang apa yang dapat dilakukan dari drive CD yang ketinggalan zaman di zaman kita. Aplikasi yang paling umum adalah pengukir laser dari kepala laser penulis DVD dan tabel koordinat dua gerakan dari kepala ini. Pintu otomatis biasanya dibuat dari meja geser untuk disk (misalnya, untuk kucing atau hamster). Saya membuat dua mainan dari meja tarik: "mobil tidak berguna" dan robot merangkak. Saya tidak akan berbicara tentang mobil yang tidak berguna, karena sangat sederhana. Siapa peduli, Anda bisa menonton
video tentangnya .
Namun, gagasan robot merangkak juga sangat sederhana. Jika seseorang tidak terbiasa dengan desain drive CD,
Anda dapat membacanya di Wikipedia .
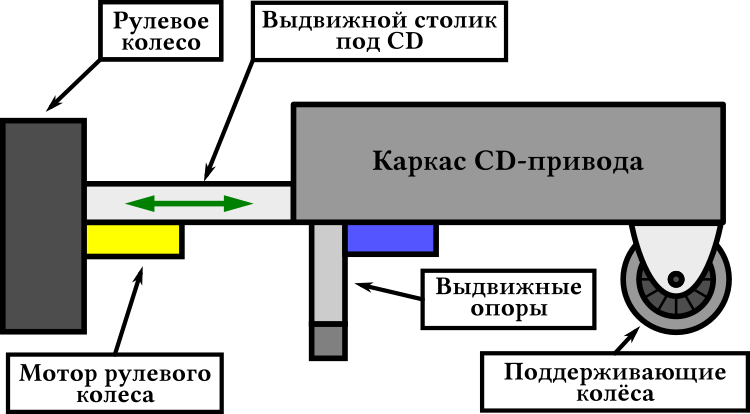
Saya akan mulai dengan deskripsi teoretis. Gambar di bawah ini menunjukkan drive CD merangkak di samping. Dia memiliki dua roda yang berputar bebas di bagian belakang, yang disebut "roda pendukung". Di depan ada "setir" dengan mesinnya sendiri. Di bawah ini ada dua penyangga yang dapat diperpanjang untuk menaikkan setir.
Pada gambar berikut, tampilan depan, ternyata sedikit dipahami.

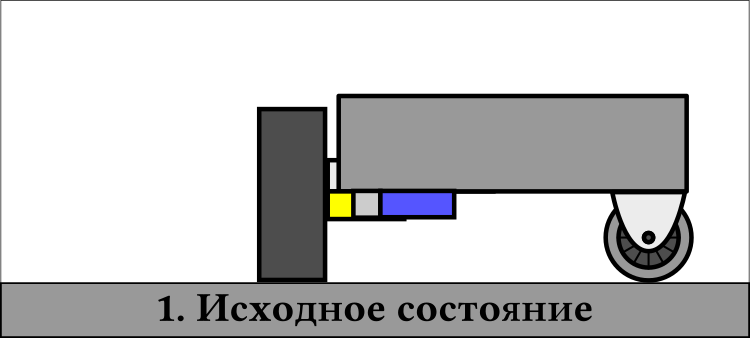
Bagaimana sistem ini merayap juga ditunjukkan dalam gambar. Jadi, ada keadaan awal ketika meja geser dari CD dan pendukung didorong masuk. Dari posisi ini, robot mulai bergerak maju, mundur dan melakukan pergantian.
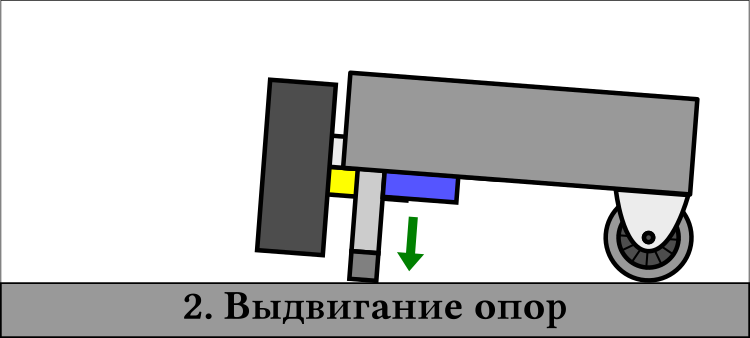
Untuk bergerak maju, penopang pertama memanjang, sehingga meningkatkan setir.
Kemudian meja CD memanjang bersama dengan setir.
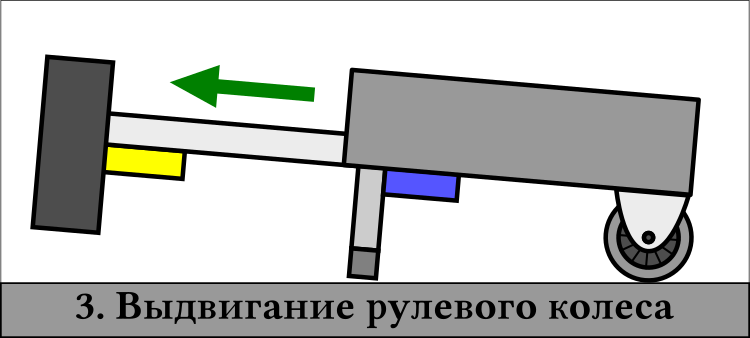
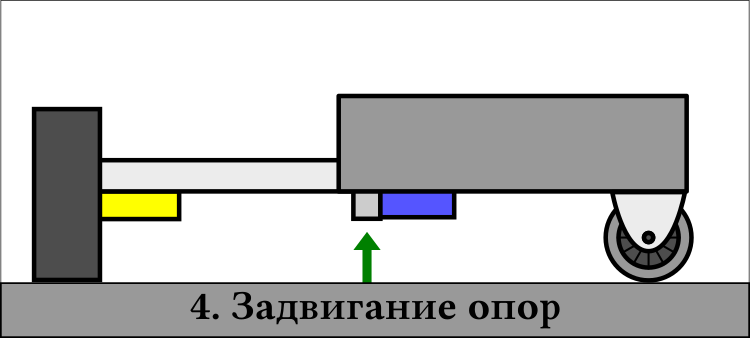
Lebih lanjut, penopang menarik dan roda kemudi lebih rendah.
Sekarang tinggal kembali ke kondisi semula dengan menggeser meja untuk CD.
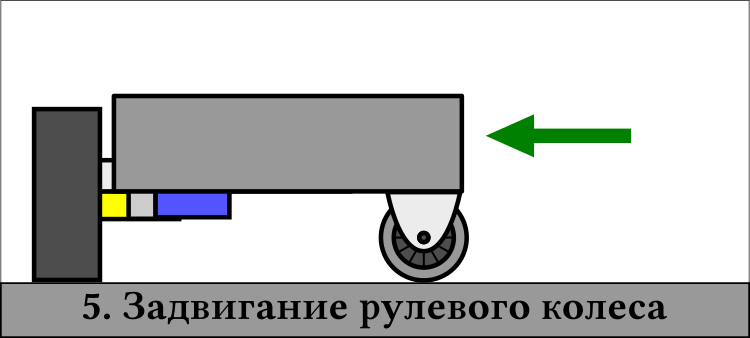
Dalam hal ini, roda kemudi menempel pada permukaan lantai, sehingga seluruh rangka drive CD ditarik ke roda kemudi. Selanjutnya, siklus berulang.
Untuk menghidupkan robot dalam keadaan awal, motor roda kemudi dihidupkan, sementara seluruh sistem mulai berputar 360 derajat di sekitar sumbu yang terletak di suatu tempat di antara roda pendukung.
Jika Anda memahami bagaimana hal ini bekerja, maka tidak akan sulit bagi Anda untuk membayangkan bagaimana gerakan mundur dilakukan.
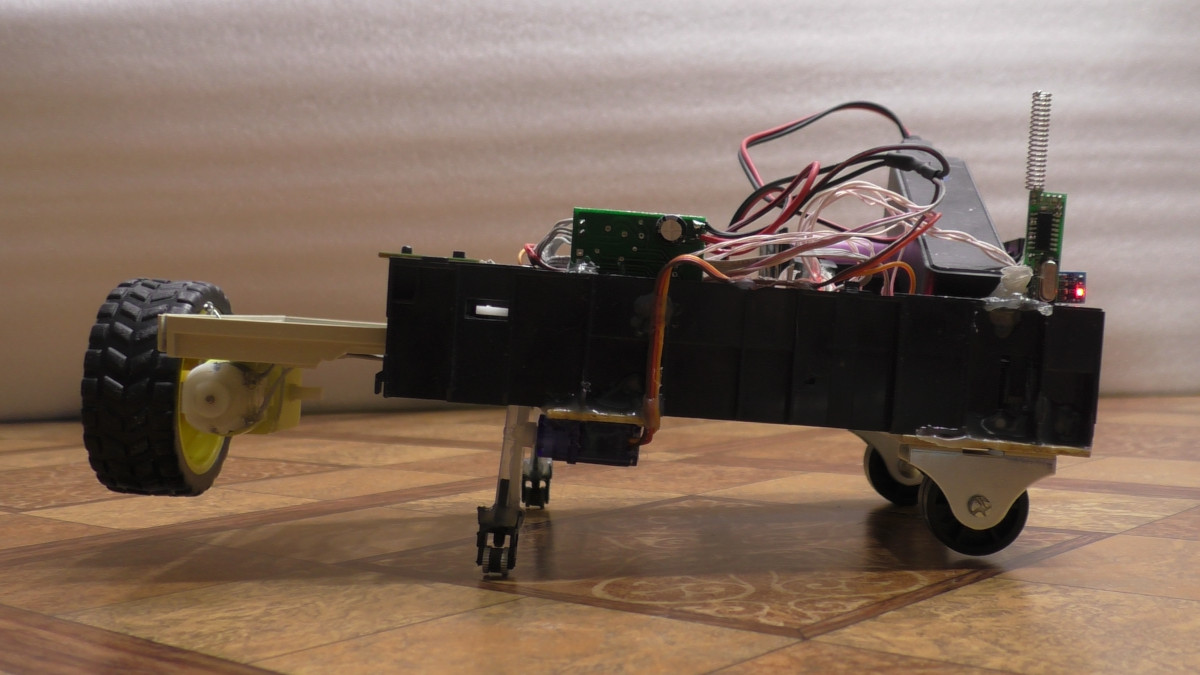
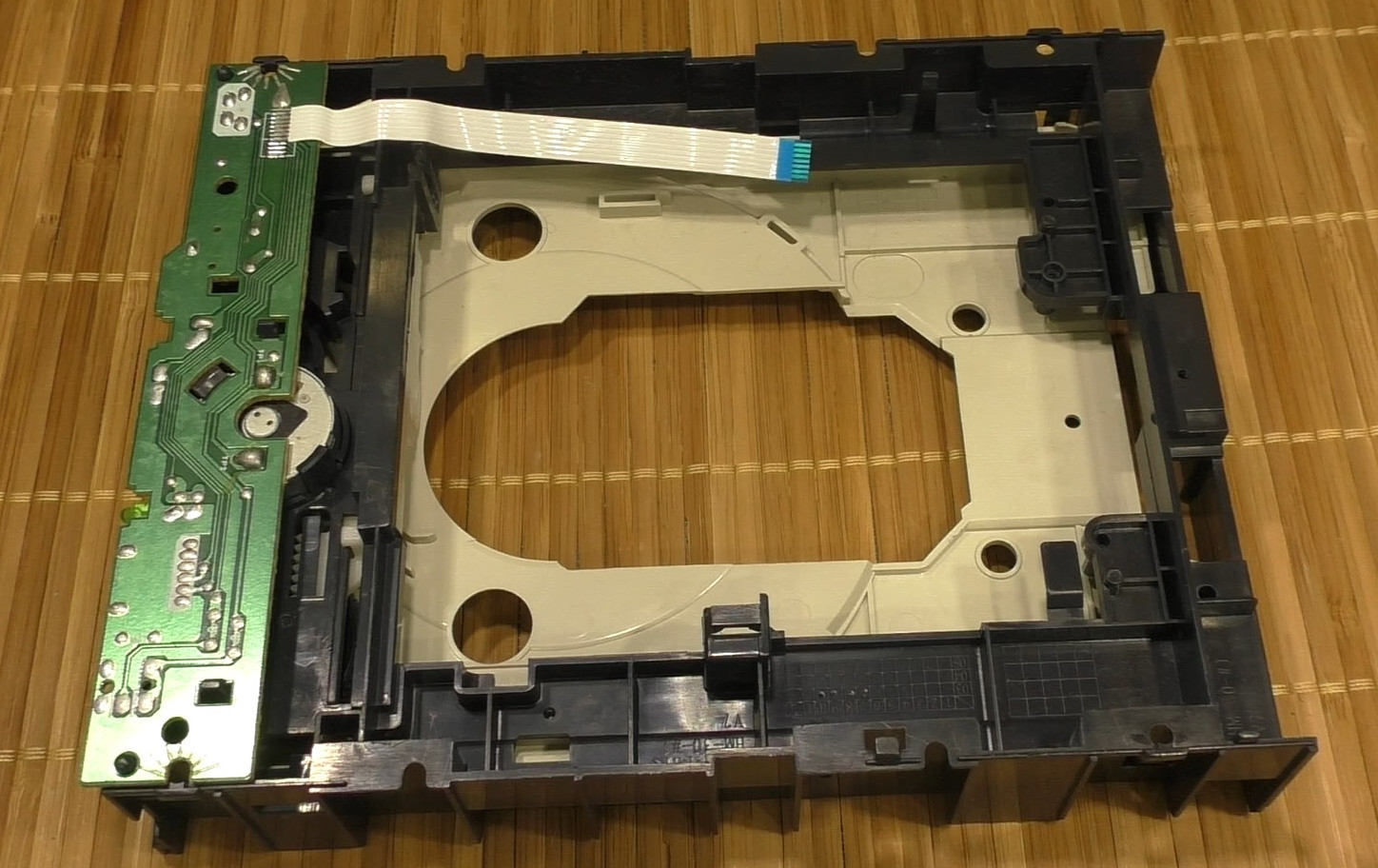
Sekarang sedikit tentang implementasi saya. Saya tidak akan memberi tahu secara rinci, karena semuanya dilakukan dengan cara yang serampangan, hanya demi memeriksa kapasitas kerja ide. Saya menggunakan CD-drive sederhana sebagai dasarnya, mengeluarkan semua optik dengan slide dari sana, hanya ada bingkai plastik dengan meja ditarik, motor dan tombol-tombol untuk meja.
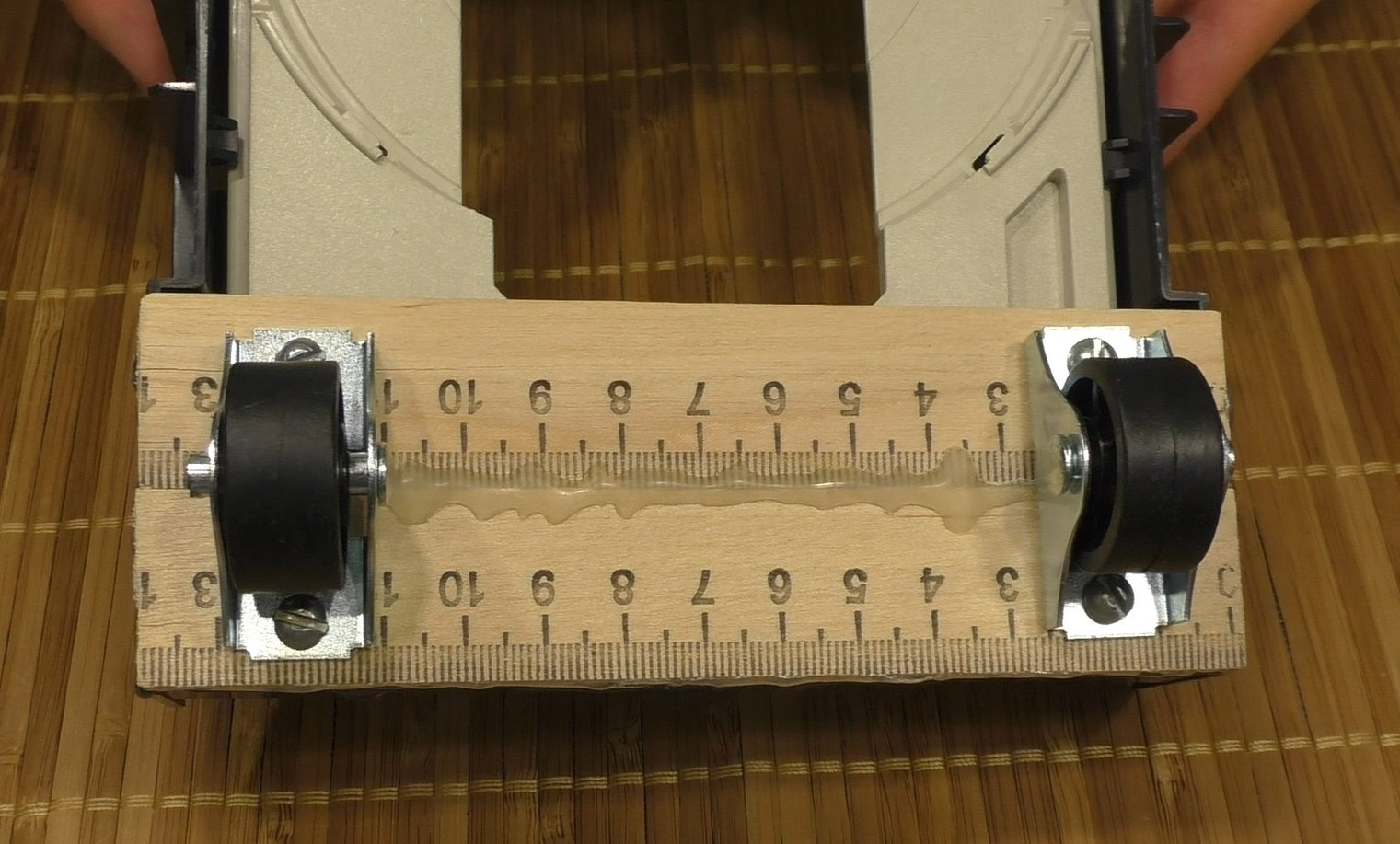
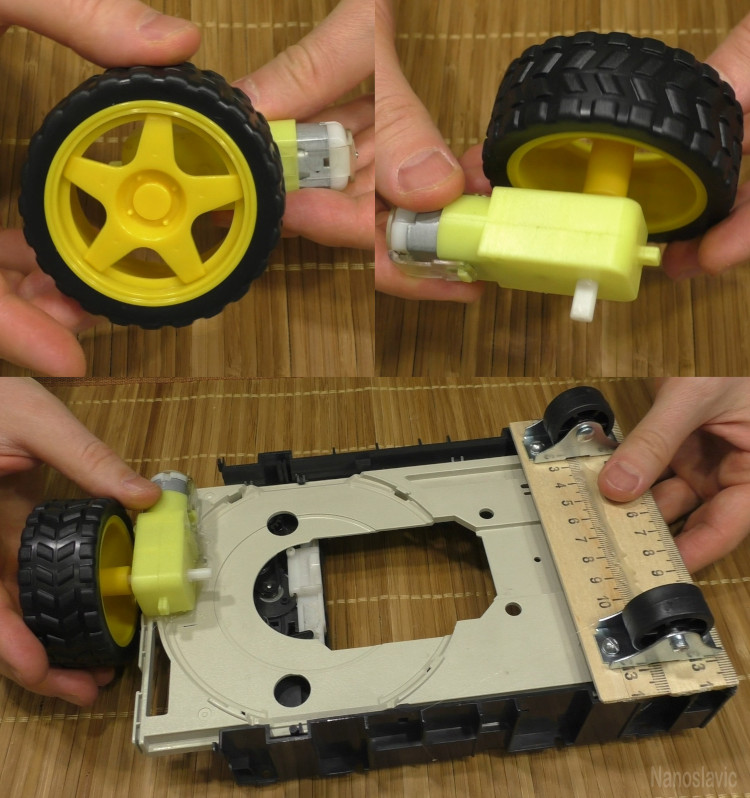
Melampirkan roda furnitur sebagai roda pendukung.
Saya membeli setir secara terpisah di suatu tempat di Internet. Dia memiliki motor dan gearbox plastik.
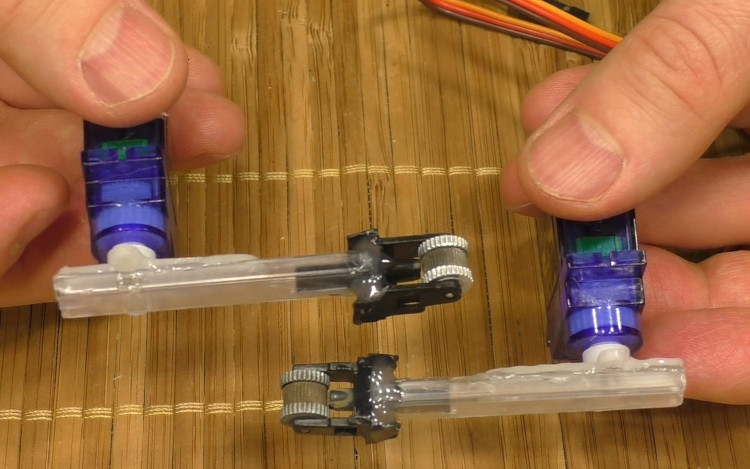
Dukungan ditarik yang terbuat dari tabung plastik, yang dijual dalam chip massal di perumahan SO8. Saya menempelkan kursi dari korek api ke mereka, setelah sebelumnya melepas batu dan pegas dari mereka, sehingga kursi bisa berputar bebas. Untuk memperpanjang dukungan digunakan dua servos murah. Semuanya dirakit terutama pada perekat panas meleleh.
Elektronik itu terbuat dari apa itu, sehingga sangat tidak optimal. Untuk mengontrol motor dari meja CD dan roda kemudi, sirkuit jembatan dengan transistor digunakan. Ini memungkinkan untuk mengubah arah rotasi. Sebagai logika - semacam papan Arduino. Untuk mengendalikan pergerakan, ia mengambil kunci fob dan sirkuit respons penerima pada frekuensi 434 MHz.

Untuk menyalakan motor, saya menghubungkan tiga baterai lithium-ion secara seri tanpa perlindungan, jadi saya menyalakannya dengan hati-hati, kadang-kadang memeriksa muatannya. Untuk menghidupkan bagian digital dan radio, saya menggunakan bank daya murah kecil yang mengeluarkan 5 V.
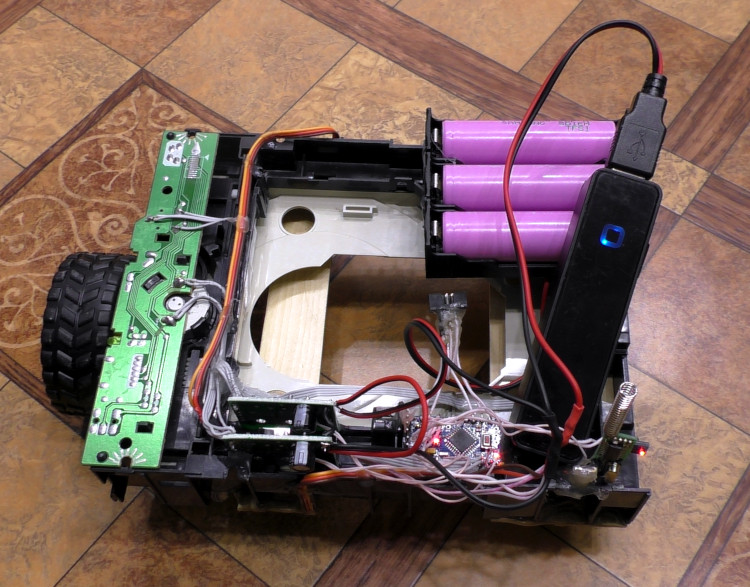
Baterai di belakang sangat berguna, karena setirnya jauh lebih berat daripada saat mendorong ke depan.
Program kontrol, ketika dinyalakan, memeriksa titik akhir dari laci CD dan mengembalikan sistem ke keadaan semula. Untuk kontrol 4 tombol digunakan. Ketika Anda menekan tombol "Maju", gerakan maju dimulai. Berhenti dan kembali ke keadaan awal sistem terjadi ketika Anda menekan tombol apa saja pada remote control. Ketika tombol "Kembali" ditekan, itu bergerak mundur, juga dengan berhenti ketika tombol apa pun ditekan. Tombol Kiri dan Kanan hanya berfungsi pada kondisi awal dan hanya saat ditekan.
Hasilnya, ternyata hanya gerakan maju yang bekerja secara normal. Saat bergerak mundur, pusat gravitasi sangat bergeser ketika kemudi diperpanjang, sehingga penopang tidak dapat mengangkatnya secara normal. Perlu servos yang lebih kuat. Karena sistem selalu kembali ke kondisi semula, perpindahan hanya dimungkinkan dengan "langkah-langkah" yang ditentukan oleh panjang tabel untuk CD, tetapi ini adalah batasan perangkat lunak murni.
Dan akhirnya, beberapa gif.
Gerakan maju, tampilan samping, 6,8 MB Gerakan maju, tampilan atas, 7,8 MB Putar, lihat dari atas, 6,3 MB Saya pikir bahwa keseluruhan sistem dapat disederhanakan dengan membuat panel kontrol pada satu lingkaran, dan mengendalikan motor dengan tombol dan sakelar. Untuk mengontrol servos Anda dapat membuat generator sederhana pada timer 555. Daya dapat dibuat dari baterai biasa dan menempatkannya di remote control, mengurangi berat robot. Remote control semacam itu akan memungkinkan Anda untuk mengendalikan robot sepenuhnya secara manual.
Terima kasih semua atas perhatian dan kerajinan yang baik untuk Anda.