
Masih sedikit lebih dari dua bulan sebelum peluncuran robot FEDOR di ISS, dan proses transformasi menjadi kosmonot cyber hampir selesai.
Sebagai
kelanjutan dari publikasi ini .
Robot Fedor atau FEDOR (Final Experimental Demonstration Object Research) adalah robot antropomorfik yang dikembangkan oleh Android Technique NGO dan Advanced Research Foundation (FPI), dan harus menggantikan seseorang di tempat berisiko tinggi.
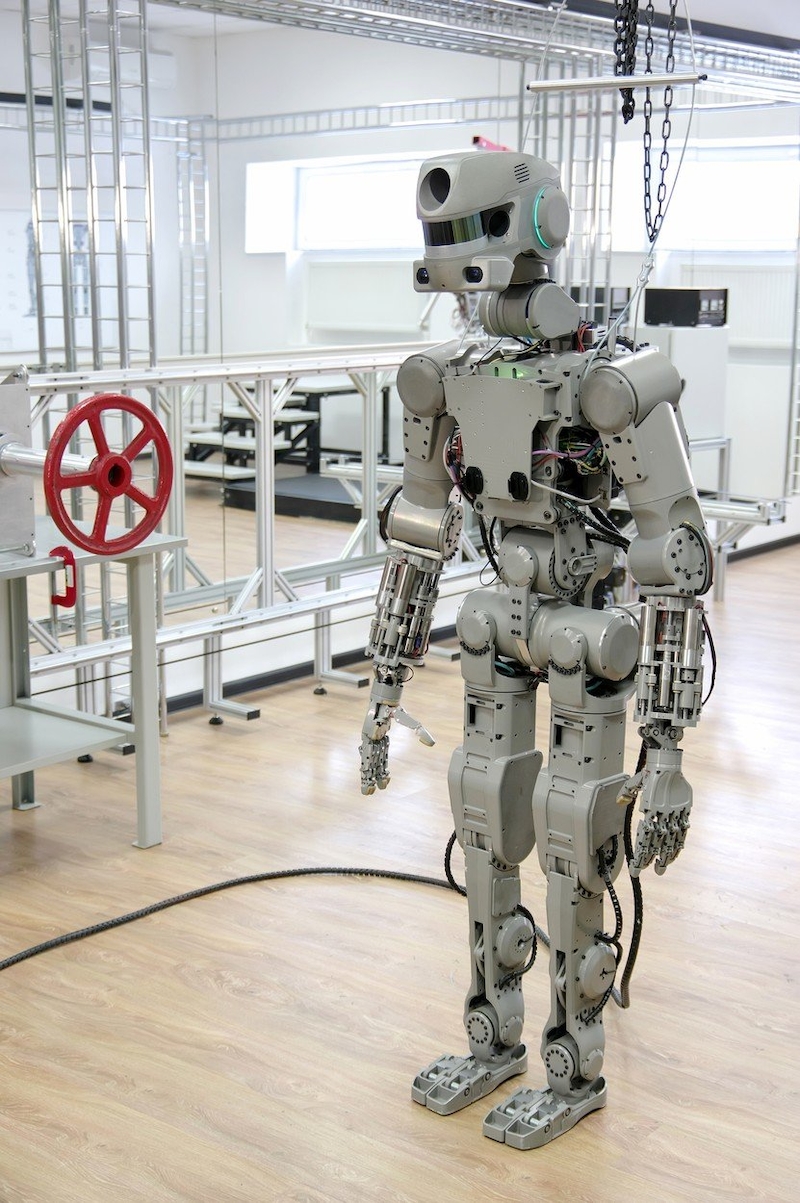 Fitur dari robot FEDOR:
Fitur dari robot FEDOR:- hampir 190 cm;
- berat hingga 160 kg (tergantung pada modul yang digunakan);
- daya hingga 13,5 kW (20 tenaga kuda), baterai - jenis tas eksternal atau daya kabel;
- terdiri dari 15 ribu bagian;
- perangkat lunak: sistem operasi waktu-nyata yang dikembangkan di St. Petersburg berdasarkan Linux, mengendalikan perangkat lunak dalam C ++, C # dan Python;
- pekerjaan offline hingga 1 jam;
- dilengkapi dengan dua kamera, imager termal, mikrofon, GPS, GLONASS, 15 jenis laser pengintai dan sistem khusus untuk menentukan posisi tubuh Anda;
- saluran video dari sistem penglihatan stereoskopis robot dapat bekerja secara bersama-sama dan secara terpisah (kerja bersama saluran memungkinkan Anda untuk menentukan jarak ke objek, dan terpisah - selesaikan setidaknya dua tugas fungsional pada saat yang bersamaan, misalnya, melakukan aksi kerja dengan dua alat berbeda pada saat yang bersamaan);
- mode operasi: berdiri sendiri, menyalin (persis mengulangi tindakan operator);
- mekanik robot dapat mereproduksi hampir semua gerakan tubuh manusia, dan perangkat lunak, termasuk perpustakaan yang diisi ulang, memungkinkan Anda untuk memperluas keterampilan profesional robot.
Ternyata di Roscosmos mereka berencana mengirim dua robot FEDOR ke ISS secara bersamaan dengan kendaraan tak berawak Soyuz MS pada 22 Agustus 2019.
Proyek uji ruang ini disebut Cyber Crew. Namun, implementasi penuh dari proyek ini masih dipertanyakan.
Masalahnya adalah bahwa robot FEDOR dalam hal ini lolos sesuai dengan perhitungan desain bukan sebagai peralatan ilmiah yang dapat ditempatkan secara padat di kompartemen kargo dan dibongkar dan digunakan di atas ISS, tetapi sebagai konstruksi humanoid yang perlu ditempatkan seperti astronot biasa di dalam kapal. "Union MS-14."
Karena, pertama, para astronot di ISS tidak dilatih untuk merakit perangkat yang sedemikian kompleks, dan menurut instruksi dari Bumi, mereka akan dapat merakitnya, tetapi waktu ruang yang berharga akan dihabiskan untuk itu.
Kedua, penerbangan uji pertama dari "awak cyber" dalam hal apa pun harus mengungkapkan banyak masalah dan masalah yang akan diselesaikan baik di papan ISS dalam mode operasional saat ini dan diperhitungkan dan dianalisis untuk menyesuaikan proyek-proyek ilmiah misi selanjutnya.
Jadi segera ada kebutuhan untuk menyelesaikan elemen struktural robot untuk standar ruang.
Setelah versi pertama dari robot FEDOR dipindahkan ke Roscosmos dan SP Korolev Rocket dan Space Corporation Energia (RSC Energia) untuk mempelajari kemungkinan penggunaannya dalam program berawak, insinyur ruang angkasa dari Roscosmos memiliki tugas baru - untuk mempersiapkan Robot FEDOR untuk misi luar angkasa dalam waktu yang cukup singkat.
Kompleks yang ditransfer ke Roscosmos mencakup elemen: robot seluler, panel kontrol, alat integrasi, dan segmen tanah.
Persyaratan ruang untuk astronot:
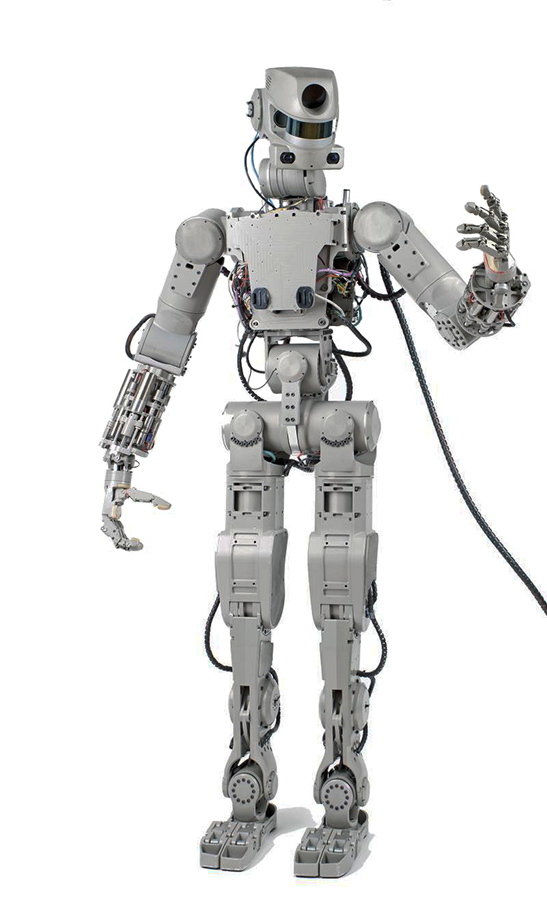
 Versi ruang dari robot FEDOR, tidak seperti yang sipil, telah mengalami peningkatan:
Versi ruang dari robot FEDOR, tidak seperti yang sipil, telah mengalami peningkatan:- berat robot berkurang menjadi 105 kg;
- korset bahu dikurangi beberapa sentimeter (untuk meningkatkan jarak sepanjang diameter palka, yang enam sampai tujuh sentimeter, dan dalam tes ternyata tidak nyaman untuk melepasnya);
- Baterai biasa diganti untuk memenuhi persyaratan keselamatan penerbangan luar angkasa;
- drive baru terpasang;
- Desain robot diuji pada dudukan bergetar.
Saat ini, semua sistem robot yang diadaptasi dari versi FEDOR-kosmonot sudah beroperasi dan siap untuk terbang.
Tetapi dengan selesainya kursi biasa untuk robot FEDOR, insinyur RSC Energia harus mengotak-atik.

Saat ini, masalah ini telah diatasi, astronot FEDOR akan terbang ke ISS di pesawat ruang angkasa Soyuz MS-14 yang tidak ada di penginapan reguler astronot (ternyata itu tidak cukup untuk robot bahkan di negara yang paling disesuaikan), tetapi dalam “rangka kursi” yang dibuat khusus. dari paduan aluminium, yang akan melindungi komponen dan mekanisme robot dari pengaruh luar selama penerbangan.
Versi pertama dari "kursi-rangka" untuk robot terlihat seperti ini:
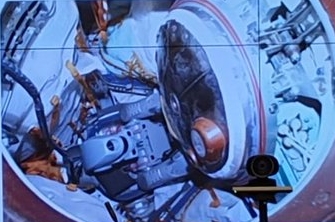
Setelah bergabung dengan ISS, dalam gravitasi nol, para astronot harus memindahkan robot dari pesawat ruang angkasa ke ISS tanpa adaptasi apa pun dan terus bekerja dengannya, oleh karena itu, di Roscosmos dan RSC Energia mereka berusaha memfasilitasi tugas ini sebanyak mungkin dan meminimalkan waktu transportasi robot seperti pada tahap pembongkaran, dan di masa depan saat diuji dalam kondisi ruang.
Secara umum, robot antropomorfik Fedor belum naik ke ISS, tetapi telah menetapkan banyak tugas untuk kedua insinyur di Bumi dan astronot di atas kompleks orbital.
Peluncuran kendaraan peluncuran Soyuz-2.1a dengan kendaraan tak berawak Soyuz MS-14 dijadwalkan pada 22 Agustus 2019. Pesawat ruang angkasa akan tetap berada di ISS selama sekitar satu setengah minggu, dan kemudian secara otomatis kembali ke Bumi.
Ngomong-ngomong, dalam kerangka uji terbang ini, direncanakan untuk menguji interaksi sistem kendali rudal digital dan "isian" analog dari sistem penyelamatan darurat. Jika terjadi kesalahan, maka robot harus tetap berfungsi.
Dan ISS sekarang memutar kru.
Kosmonot Rusia Oleg Kononenko, David Saint-Jacques Kanada dan Anne McClain dari Amerika akan kembali ke Bumi dari ISS. Mereka tiba di stasiun pada Desember 2018.
Pintu palka transisi antara ISS dan Soyuz akan ditutup pada 24 Juni pukul 23.10 waktu Moskow. Pembongkaran dari stasiun dijadwalkan pada 25 Juni 2019 pukul 2.25, dengan memasukkan mesin kapal untuk turun dari orbit pada 4,54.
20 Juli 2019 direncanakan untuk mengirim ISS ke atas awak pesawat ruang angkasa Soyuz MS-13 yang terdiri dari: Alexander Skvortsov, Andrew Morgan dan Luca Parmitano.
Dengan demikian, Alexei Ovchinin (Rusia), Tyler Nicholas Haig dan Kristina Koch (keduanya dari AS) dan tiga astronot baru dari peluncuran Juli akan bertemu robot FEDOR di ISS.
Astronot FEDOR dikendalikan dalam tiga cara: melalui radio, serat optik, atau kabel listrik biasa.
Robot dapat dikontrol bukan hanya oleh para astronot di atas ISS, tetapi teknisi di Bumi, yang terhubung ke robot melalui saluran komunikasi eksternal dan menggunakan setelan "kontrol" khusus dengan kacamata 3D untuk melihat situasi melalui mata robot.
Sangat menarik apa tugas ilmiah dan percobaan yang direncanakan dan akan dilakukan pada ISS dengan robot FEDOR.
Meskipun kembali pada tahun 2016, dinyatakan bahwa robot FEDOR akan dapat pergi ke luar angkasa, melakukan pemeliharaan dan pekerjaan terjadwal lainnya.
Dan setelah menyelesaikan tes tambahan pada kompatibilitas elektromagnetik dari robot pada ISS, saluran komunikasi akan diuji dan kosmonot FEDOR akan menjalankan serangkaian perintah yang datang dari Bumi.
