
Sebuah robot robot kecil ukuran nirkabel tanpa kabel yang terbang "Bumble" dari proyek Astrobee mulai menjalani tes penerbangan di atas kapal ISS.
2019 adalah tahun robot di ISS. FEDOR belum tiba, tetapi tes pertempuran robot dari proyek Astrobee telah dimulai.

Dua robot sudah berada di stasiun - ini adalah Bumble dan Honey, dan pada bulan Juli robot ketiga, Queen, diharapkan tiba di ISS.

Nama mereka tidak begitu mudah dikaitkan dengan miniatur dan memiliki disposisi "lebah".
Ini adalah layanan robot otonom kecil yang dirancang khusus untuk bekerja dalam gravitasi nol di dalam modul ISS, dirancang dan dibuat oleh
NASA di pusat penelitian Ames , yang seharusnya seperti lebah untuk mengambil bagian dari tugas ruang angkasa rutin dan membebaskan awak ISS dari tindakan sederhana namun sering.
Dengan demikian, proyek Astrobee adalah sistem terbang bebas dari kompleks robot, tujuan utamanya adalah untuk menguji platform otomatis berukuran kecil dalam kondisi tanpa gravitasi dengan penerimaan dan analisis data dalam kondisi nyata dan kemungkinan untuk meningkatkan lebih lanjut dan meningkatkan perangkat lunak dan fungsi robot untuk melakukan tugas saat ini dan baru di ISS.

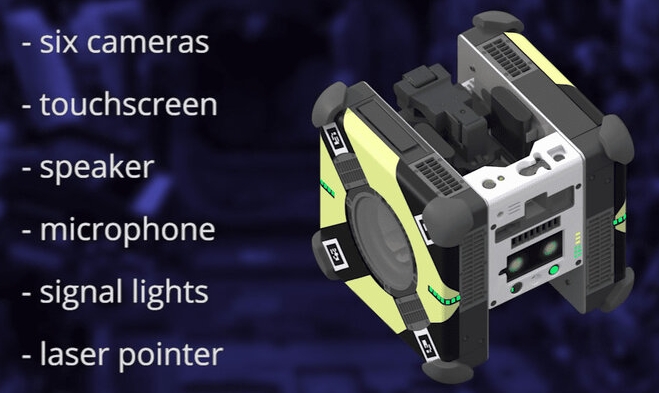
 Karakteristik robot dari proyek Astrobee:
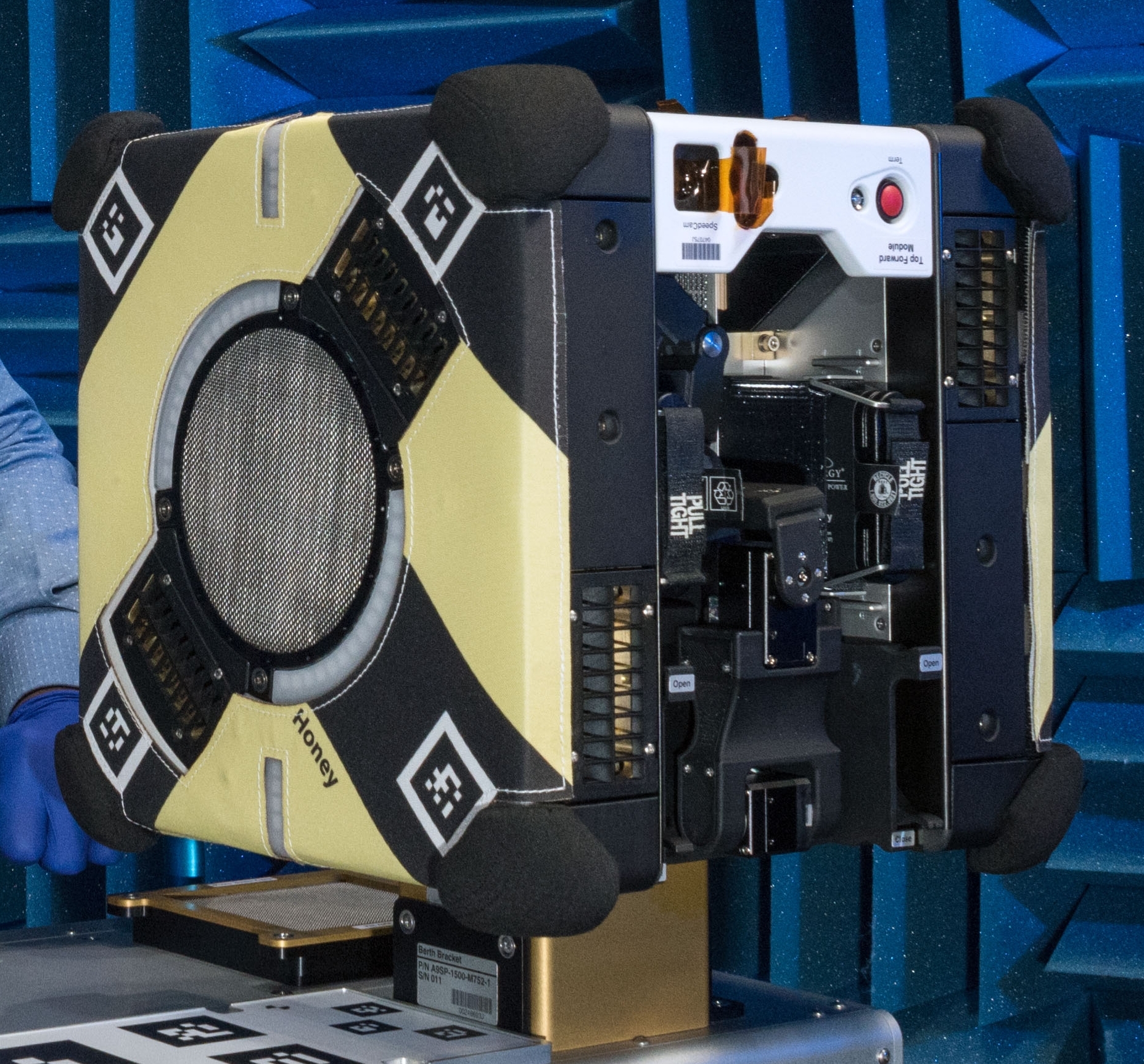
Karakteristik robot dari proyek Astrobee:- ukuran satu robot adalah 30x30x30 sentimeter (1x1x1 kaki);
- tubuh robot ditutupi dengan bahan lunak untuk meminimalkan kemungkinan kerusakan ketika mengenai benda atau elemen pada ISS;
- bagian dari wajah robot dirancang untuk bekerja dengan beban kecil, bahkan ada sistem untuk menangkap dan memperbaiki objek dengan manipulator lipat sehingga robot dapat memegang dan dengan aman memindahkan objek dari satu ujung stasiun ke yang lain, dengan bantuan tangkapan ini robot dapat memperbaiki posisinya ketika perlu, menangkap di pegangan tangan atau elemen lain dari ISS;

- robot memiliki stasiun pengisian eksternal yang terpisah, yang berfungsi untuk mengisi baterai robot dan mengambil data telemetri;

- robot hanya dapat bergerak di dalam ISS dalam kondisi tanpa gravitasi hanya jika ada atmosfer dalam modul kerja dengan robot, sistem reaktif mereka menggunakan udara stasiun untuk bergerak;
- setiap robot memiliki sistem kontrol komputer sendiri untuk sistem kipas onboard, yang memungkinkan Anda untuk menangkap dan mengeluarkan udara melalui 12 nozel ke arah yang berlawanan dengan vektor gerakan yang dimaksudkan, yang memungkinkan robot untuk bergerak ke segala arah dan terbang bebas di sekitar ISS dalam gravitasi nol;
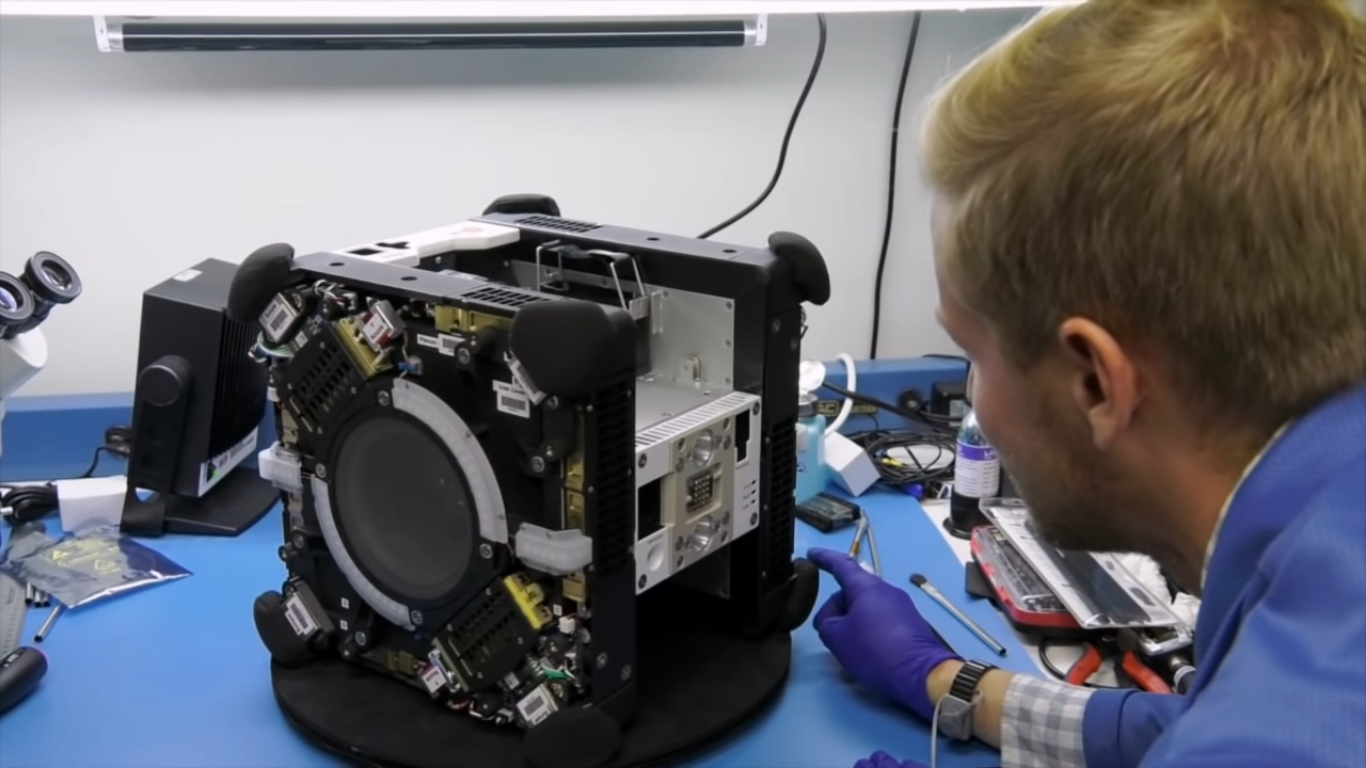
- Penggemar robot terletak di belakang dinding pelindung khusus pada permukaan kubusnya;
- sistem komputer robot berjalan di Linux, dan modul yang bertanggung jawab untuk bekerja dengan objek dan memindahkannya bekerja berdasarkan Android, yang memungkinkan Anda untuk dengan cepat memperluas fungsionalitas sistem jika diperlukan;
-
Tautan ke repositori github dengan perangkat lunak proyek Astrobee.
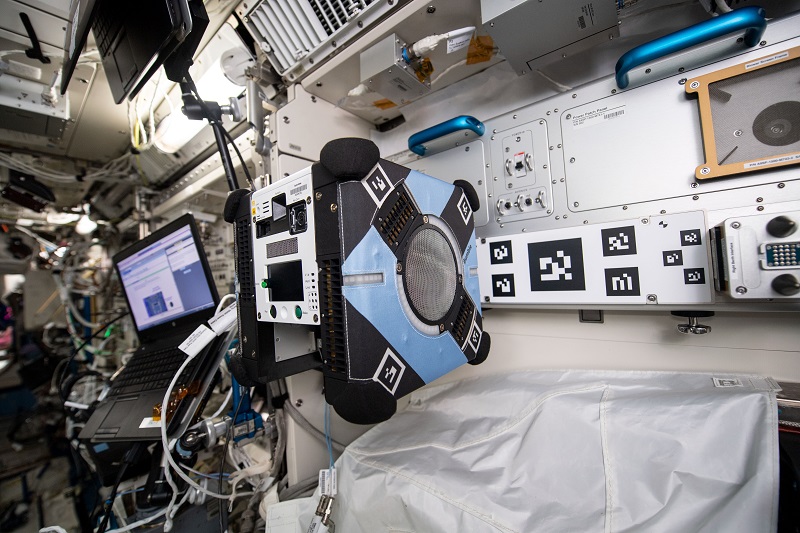
- masing-masing robot memiliki papan: kamera navigasi utama dengan bidang pandang 116 °, beberapa kamera HD dengan fokus otomatis yang mampu mentransmisikan informasi dari ISS ke Bumi secara real time, dan kamera Pico Flexx CamBoard on-board memungkinkan robot untuk mengenali objek dan rintangan dari jarak empat meter;
-
setiap robot memiliki detektor optik untuk menentukan kecepatan dan prosedur penghentian darurat;
- mode operasi robot: otonom, mereka juga dapat dikendalikan dari jarak jauh, mengambil dengan aman, dikenakan biaya jika perlu, matikan.
 Fungsi robot dari proyek Astrobee:
Fungsi robot dari proyek Astrobee:- tugas utama robot adalah untuk membantu kru di ISS, melakukan sejumlah tugas rutin sehingga staf dapat fokus pada tugas yang lebih penting (melakukan eksperimen dan berbagai penelitian);
- melakukan inventarisasi, mendokumentasikan percobaan, memeriksa sistem ISS dan memindahkan beban, objek dan alat melalui koridor stasiun sempit dan antar modul;

- melakukan pemeliharaan modul ISS ketika tidak ada personil di dalamnya atau di tempat-tempat di mana kru tidak dapat dengan cepat mencapai;
- memantau pengoperasian sistem dan sensor ISS;
- memantau kualitas udara, menganalisis tingkat konsentrasi karbon dioksida di berbagai tempat ISS sesering yang diperlukan.
 Sejarah penampilan robot dari proyek Astrobee di ISS:
Sejarah penampilan robot dari proyek Astrobee di ISS:- Stasiun pengisian dikirimkan ke ISS pada 17 November 2018 dan dipasang pada 15 Februari 2019;


Pemutus sirkuit ABB digunakan:

- Robot Bumble and Honey diluncurkan dari Bumi ke ISS pada 17 April 2019;

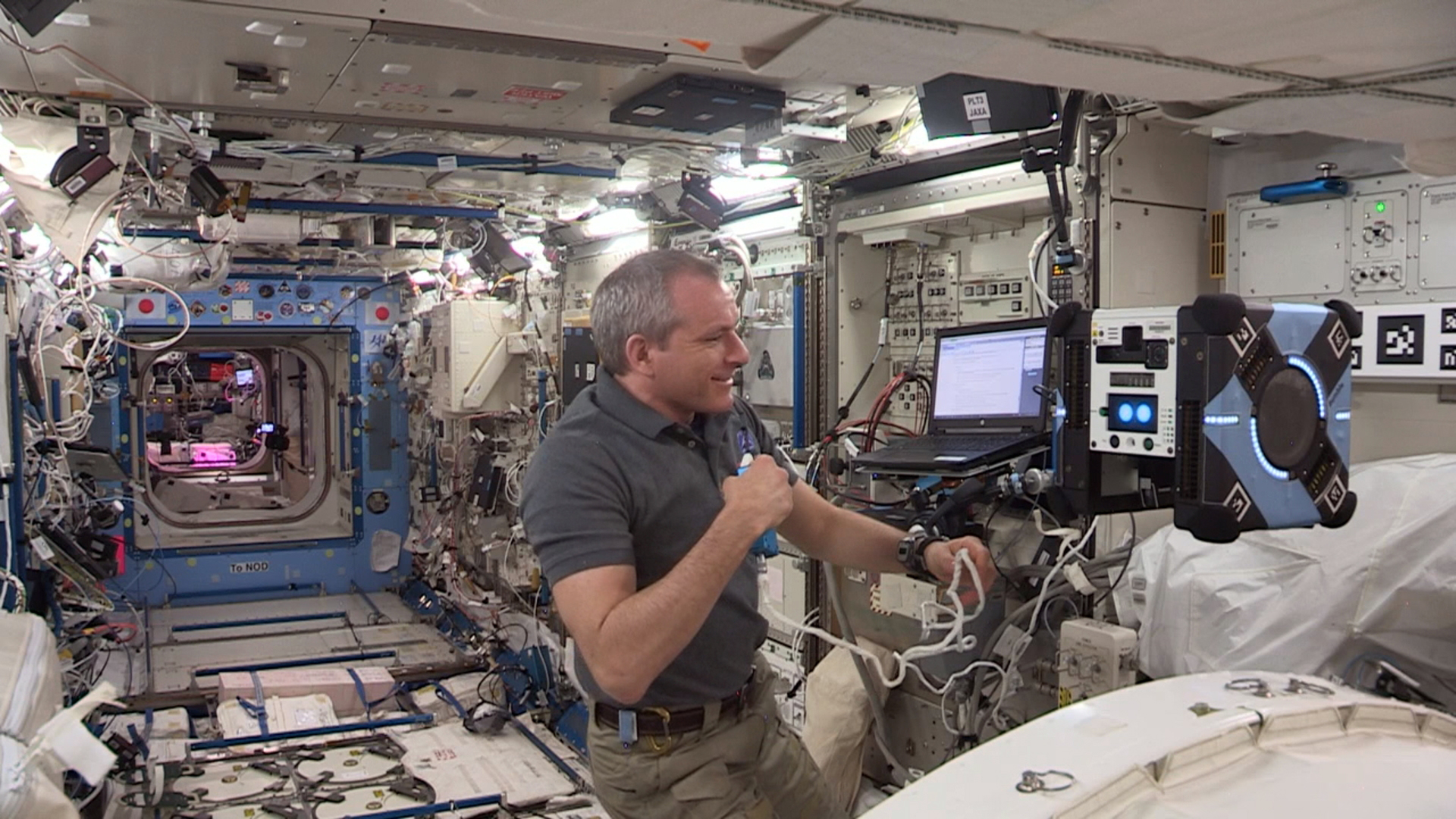
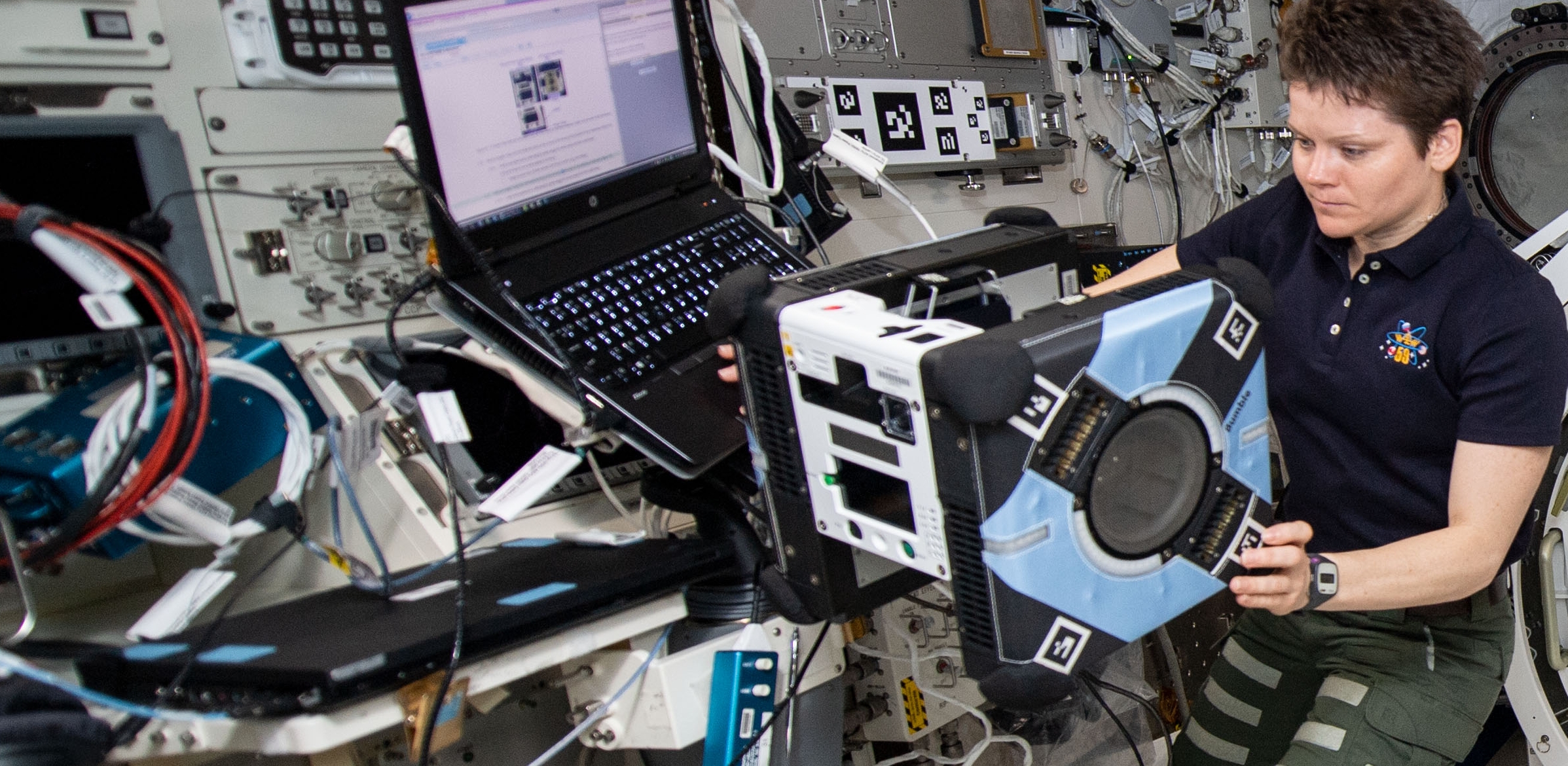
- Pada 30 April 2019, Ann McClain (astronot ISS) membongkar sebuah kotak dengan robot Bumble dan, dengan dukungan tim pengembangan NASA dari proyek Astrobee, yang terletak di Ames Research Center, menguji semua sistem bantu robot - avionik, kamera video, sistem pendorong, dan transfer data dan pengisian baterainya;





- Pada 14 Juni 2019, tes penerbangan dengan robot Bumble dimulai;
- Juli 2019 - robot Ratu ketiga diharapkan tiba di ISS.
Tentang
penerbangan pertama robot Astrobee
Bumble di ISS:
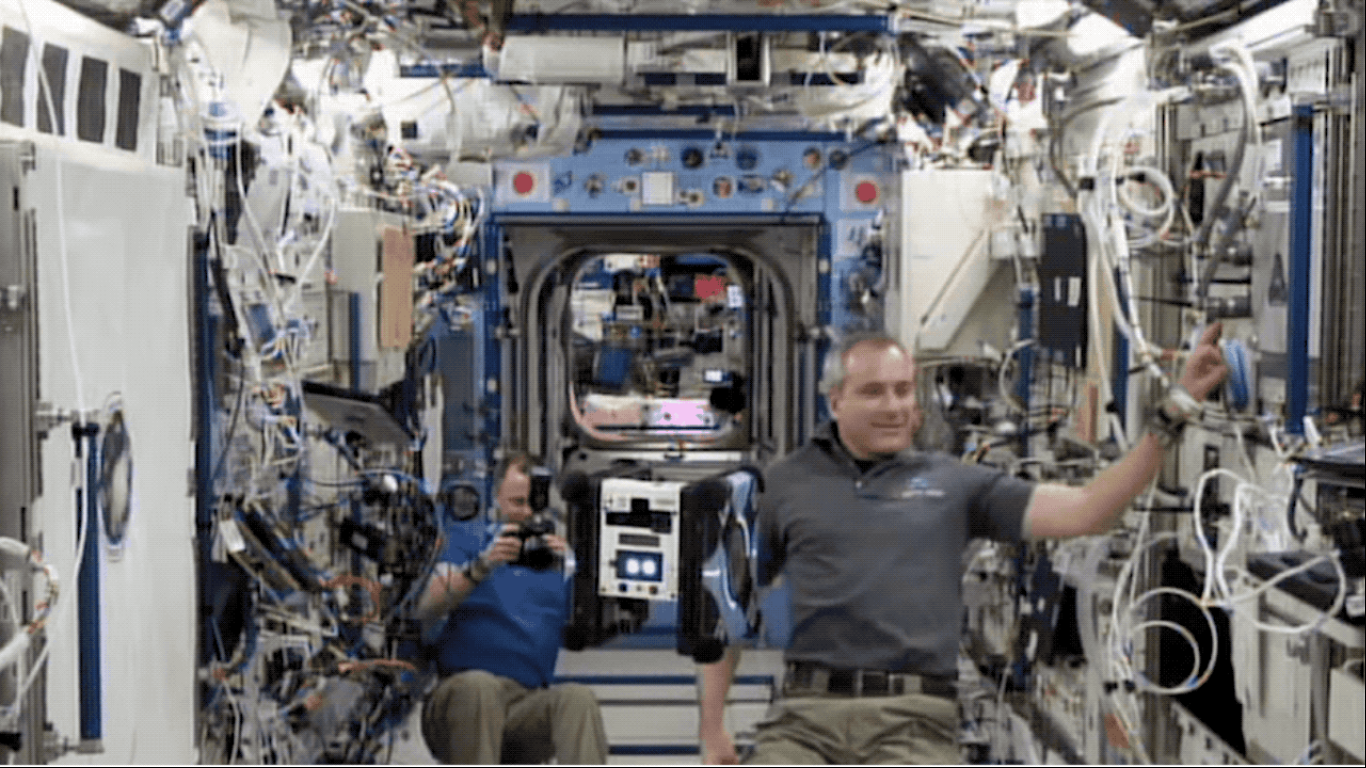
Pada 14 Juni 2019, robot Bumble menjadi robot pertama dari proyek Astrobee, yang melakukan uji terbang pertama dalam gravitasi nol.
Sebelum penerbangan pertama robot Bumble, tim proyek Astrobee di Ames Research Center dari jarak jauh memeriksa semua sistemnya, menerima konfirmasi dari Bumi bahwa robot dapat mengidentifikasi lokasi dan siap untuk bernavigasi di dalam ISS.
Astronot Badan Antariksa Kanada David Saint-Jacques memberikan bantuan langsung dengan tes preflight dengan secara manual memindahkan robot Bumble ke dalam laboratorium sains ISS dalam modul Kibo untuk memungkinkan sistem navigasi robot untuk mengkalibrasi di lingkungan baru setelah fakta.
Sistem navigasi robot Bumble menggunakan kamera penuh waktu untuk memantau dan memantau ruang eksternal dan kemudian membandingkan gambar yang diterima dengan peta interior ISS yang sebelumnya dimuat ke dalam robot.

Robot dari proyek Astrobe dirancang untuk bergerak ke segala arah dan memutar sumbu mereka di ruang angkasa di atas ISS.
Selanjutnya, tes dimulai pada pengoperasian sistem penerbangan robot Bumble dalam mode otomatis dan mode terkontrol (jauh dari Bumi).
Selama uji terbang pertama robot Bumble, operasi komponen utama di udara diperiksa dan kompleks gerakan dasar dilakukan, seperti "terbang 11,8 inci (30 cm) ke depan" atau "memutar 45 derajat ke kanan", orientasi dalam ruang ISS dan sebagainya.

NASA berencana untuk terus menguji kemampuan penerbangan robot Bumble dengan serangkaian manuver yang semakin kompleks untuk menentukan seberapa baik elemen-elemennya dapat bekerja dalam gravitasi nol dan penyesuaian apa yang perlu dilakukan terhadap perangkat lunak untuk penggunaan lebih lanjut.
Berdasarkan hasil kompleks dari tes penerbangan ini, pengaturan dasar akan dibuat untuk sistem propulsi robot dari proyek proyek Astrobe, dengan bantuan yang direncanakan untuk membantu robot Bumble, Honey dan Queen bersiap untuk mengambil peran sebagai anggota awak ISS baru.
Penerbangan pertama dari robot "Bumble" 
