Salah satu bencana teknologi paling serius dalam sejarah umat manusia terjadi pada 26 April 1986. Dan kemudian hampir berulang pada 12 Maret 2011. Seperti yang Anda duga, kita berbicara tentang kecelakaan di pembangkit listrik tenaga nuklir Chernobyl di Uni Soviet dan pembangkit listrik tenaga nuklir Fukushima-1 di Jepang. Serial Chernobyl, yang difilmkan oleh HBO, sekali lagi memicu minat akan sejarah kecelakaan Chernobyl dan mengingat betapa sulitnya menghentikan pelepasan radionuklida dari reaktor yang hancur ke atmosfer. Secara terpisah, mereka berbicara tentang kegagalan penggunaan robot dan permintaan paksa untuk bantuan orang. Jepang melakukan banyak percobaan dengan berbagai robot yang dapat menunda kebutuhan untuk menarik orang ke pemberantasan.
Kecelakaan di pembangkit listrik tenaga nuklir Chernobyl dan Fukushima memiliki penyebab yang berbeda dan kronik peristiwa yang berbeda, tetapi mereka memiliki satu kesamaan - area luas di sekitar stasiun terinfeksi, yang membuatnya tidak mungkin bagi mereka untuk hidup dengan aman untuk waktu yang lama, dan tidak ada pertanyaan tentang pembersihan lengkap unit-unit listrik. Dalam kedua kasus itu, manusia tidak siap untuk likuidasi konsekuensinya - ratusan ribu orang di Uni Soviet bekerja pada dekontaminasi zona eksklusi dan pembangunan sarkofagus pelindung di atas reaktor. Di Jepang, mereka pergi ke arah lain.
Referensi: standar paparan
Ungkapan tentang latar belakang radiasi dari seri Chernobyl berhasil menjadi meme di Internet asing: "3,6 x-ray tidak ada yang baik, tetapi tidak mengerikan." Memang, apakah pantas untuk takut dengan sinar-x 3,6 yang sama ini per jam, atau apakah ini benar-benar bukan latar belakang yang mengerikan? Untuk lebih memahami pengukuran dari Fukushima yang diberikan pada posting di bawah ini, Anda harus terlebih dahulu memahami skala dosis dan pengaruhnya terhadap tubuh.
X-ray (P), yang terkenal di Rusia, adalah satuan pengukuran latar belakang radiasi yang tidak digunakan yang tidak termasuk dalam sistem SI. Sekarang Sievert (Sv) digunakan sebagai gantinya. Sederhananya, 1 Sv sama dengan 100 R. Artinya, 3,6 R / jam adalah 0,036 Sv / jam atau 36 mSv / jam. Di Rusia, di beberapa lembaga penelitian Anda dapat melihat panel dengan latar belakang saat ini, diukur dalam x-ray. Rata-rata, latar belakang perkotaan di negara kita berfluktuasi pada level 12-20 μR / jam atau 0,12-0,2 μSv / jam. Seseorang menerima dosis sekitar 2,4 mSv per tahun dari latar belakang radiasi alami di planet kita (tergantung pada negara dan ketinggian). Radiasi ini berasal dari luar angkasa, berasal dari tanah, air, ada di udara, berkat gas radon.
Dan sekarang sebuah meja kecil dengan dosis yang kami terima sepanjang hidup kami (paparan tunggal yang ditunjukkan di bawah ini adalah penerimaan dosis yang sesuai hingga 4 hari):


Mari kita kembali ke 3,6 R / jam yang disebutkan dalam seri. 0,036 Sv / jam (36 mSv / jam) benar-benar bukan latar belakang yang mengerikan jika terjadi kecelakaan, untuk pengembangan penyakit radiasi ringan perlu untuk tinggal di zona bahaya selama lebih dari satu hari, dan pekerjaan perbaikan selama beberapa jam cukup aman dan dapat diterima. Dan sekarang kita ingat bagaimana sedikit kemudian mereka mengatakan dalam seri bahwa latar belakang di reaktor tidak 3,6, tetapi 15.000 x-ray (150 Sv / jam). Empat menit dengan latar belakang seperti itu memerlukan kematian yang tak terhindarkan. Setelah dua menit, hanya perawatan medis tercepat yang dapat memberikan kesempatan keselamatan, dan 25 detik sudah cukup untuk mendapatkan penyakit radiasi.
Toshiba di Fukushima
Kemitraan antara Toshiba dan Perusahaan Energi Tokyo (TEPCO) dimulai sejak tahap konstruksi pembangkit listrik tenaga nuklir Fukushima-1. Toshiba bertanggung jawab atas pembangunan reaktor tipe BWR untuk unit tenaga ketiga dan kelima, yang ditugaskan masing-masing pada tahun 1976 dan 1978. Di antara kelebihan reaktor BWR adalah tekanan uap yang lebih rendah di sirkuit primer daripada, misalnya, Soviet VVER, dan suhu pengoperasian yang lebih rendah. Kerugiannya termasuk kerumitan pembuatan, kebutuhan akan wadah berukuran sangat besar, kerumitan kendali dan radiolisis dalam elemen bahan bakar, yang memerlukan pembangkitan hidrogen eksplosif.
Jika kecelakaan di pembangkit listrik tenaga nuklir Chernobyl disebabkan oleh kurangnya desain reaktor RBMK, yang membuat dirinya terasa selama pelanggaran selama pengujian, maka dua bencana alam menyebabkan insiden Fukushima. Gempa bumi dengan rekor 9.0-9.1 menyebabkan penutupan reaktor, dan tsunami berikutnya membanjiri wilayah Fukushima-1 dan generator darurat memasok pompa pendingin reaktor. Reaktor stasiun, yang bahkan dalam hal penghentian darurat, tidak segera dingin, dibiarkan tanpa masuknya air dingin, yang menyebabkannya mendidih, meningkatkan tekanan uap dan suhu di dalam, menghasilkan hidrogen karena kontak dengan zirkonium uap dalam elemen bahan bakar (reaksi steam-zirconium) dan ledakan selanjutnya. . Di unit daya pertama, kedua dan ketiga, teras reaktor meleleh dan bahan bakar nuklir bocor. Di Fukushima, radionuklida mengalir ke laut bersama dengan air pendingin, di pembangkit listrik tenaga nuklir Chernobyl saat kebakaran, mereka memasuki atmosfer dan menyebar ke seluruh Eropa.
 Kronik tentang apa yang terjadi pada tiga unit daya. Unit tenaga keempat juga terpengaruh, tetapi tidak ada bahan bakar nuklir di reaktornya, jadi hanya ada api. Sumber: Roulex_45 / Wikimedia
Kronik tentang apa yang terjadi pada tiga unit daya. Unit tenaga keempat juga terpengaruh, tetapi tidak ada bahan bakar nuklir di reaktornya, jadi hanya ada api. Sumber: Roulex_45 / Wikimedia
Untuk menghilangkan kecelakaan Fukushima, perlu untuk menyusun peta kerusakan, menemukan bahan bakar cair dan titik kebocorannya, menghilangkan bahan bakar nuklir bekas dari reaktor dan kolam penampungan, membongkar puing - yaitu, melakukan pekerjaan luar biasa di bawah latar belakang radiasi yang sama kolosalnya. Sekarang pekerjaan di FAES ini dilakukan oleh robot dan mobil yang dikendalikan dari jarak jauh - mengirim orang ke zona kecelakaan terlalu berbahaya, di beberapa tempat stasiun latar belakang dapat membunuh seseorang hanya dalam beberapa menit.
Toshiba, bersama-sama dengan Lembaga Penelitian Internasional untuk Dekomisioning Reaktor Nuklir (IRID), sedang mengembangkan robot untuk tugas-tugas khusus - inspeksi unit daya Fukushima dan dekontaminasi (pembersihan) kamar dari kontaminasi radioaktif. Kami akan berbicara tentang beberapa robot Toshiba paling terkenal yang telah membuat kontribusi kecil namun penting bagi penyebab kecelakaan itu.
Ngomong-ngomong, ada pendapat keliru bahwa likuidasi Fukushima tidak memperhitungkan pengalaman berharga Chernobyl. Ini pada dasarnya salah. Segera setelah kecelakaan itu, sekelompok ahli Jepang-Rusia di bidang energi nuklir diciptakan untuk menangani konsekuensi dari kecelakaan Fukushima-1, di antaranya adalah Larion Aleksandrovich Lebedev, seorang peserta langsung di pembangkit listrik tenaga nuklir Chernobyl sejak musim panas 1986, yang merupakan anggota Institut Teknik Fisika Moskow, yang memberikan kontribusi besar dalam studi kondisi radiasi dan pembangunan sarkofagus. Setelah kecelakaan di Jepang, Larion Lebedev meningkatkan teknologi untuk pemisahan tritium dari air radioaktif, yang memungkinkan kami untuk mulai membersihkan sejumlah besar air berat yang tersisa setelah pendinginan reaktor yang hancur. Atas nama pemerintah Jepang, Larion Alexandrovich dianugerahi Order of the Rising Sun, dianugerahkan atas jasa militer dan sipil.
Pramuka berkaki empat
Robot Toshiba pertama yang memasuki FAES adalah pesawat tanpa awak berkaki empat tanpa nama, yang pengembangannya dimulai segera setelah kecelakaan. Misinya, seperti semua robot yang diluncurkan di pembangkit listrik pada tahun-tahun awal, adalah pengintaian radiasi dan penilaian kerusakan di dalam unit daya.
Dosimeter dan enam kamera dipasang pada sasis untuk memeriksa lokasi stasiun. Elektronik yang dilindungi dirancang untuk beroperasi dengan radiasi 100 mSv / jam selama satu tahun (dengan 10 jam hari kerja) dan dengan latar belakang yang jauh lebih besar untuk periode pendek. Benar, satu pengisian baterai hanya cukup untuk 2 jam keberadaan otonom. Robot bergerak dengan kecepatan sekitar 1 km / jam, yang cukup ketika memeriksa unit daya yang hancur. Manajemen dilakukan di udara dengan redundansi jika terjadi gangguan.
Di bagian bawah perangkat, sebuah drone pengintai kecil terpasang, yang dapat melepaskan diri dari pembawa dan merangkak ke tempat-tempat sempit di mana robot tinggi tidak bisa melewatinya. Itu seharusnya digunakan untuk mencari kebocoran air pendingin di bawah pipa reaktor.
Ini bukan untuk mengatakan bahwa harapan tinggi disematkan pada robot: bahkan pada tahap demonstrasi, para jurnalis menunjukkan lambatnya mesin - butuh satu menit untuk memanjat setiap langkah tangga, dan ketika meletakkan kaki di permukaan yang tidak stabil, robot dapat berguling di sisinya.
Namun, mekanisme Toshiba eksperimental pertama untuk FAES masih berhasil menembus pembangunan unit daya kedua dan melakukan sedikit pengintaian. TEPCO menerbitkan laporan pada 11 Desember 2012. Robot itu mengambil gambar salah satu pipa, mengkonfirmasi tidak adanya kebocoran. Pada Maret 2013, ia masuk lima kali lagi. Namun segera, ketika mencoba untuk memeriksa lebih lanjut tempat, robot kehilangan keseimbangan di tangga dan jatuh ke sisinya. Karena tidak adanya mekanisme belok, pramuka berkaki empat tetap berbaring di blok kedua.
Lipat Kalajengking Explorer
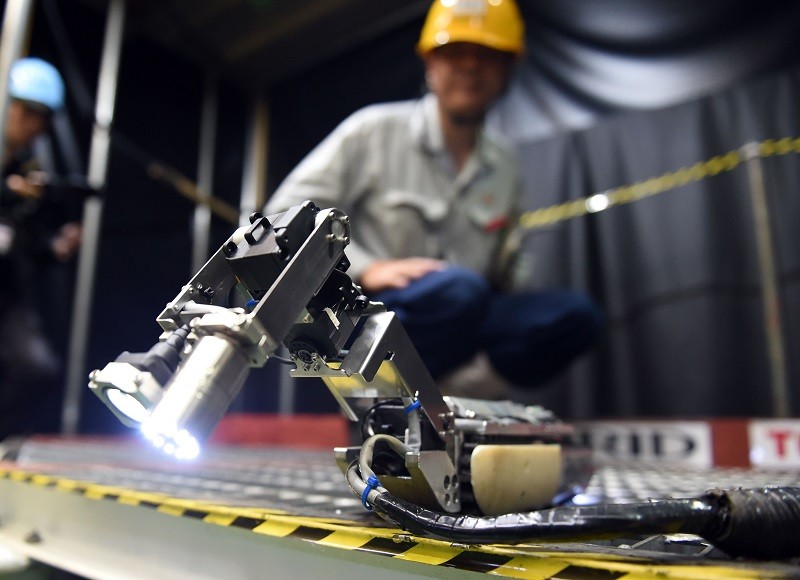
Robot perusahaan berikutnya, yang memperhitungkan semua kekurangan dari model sebelumnya, adalah Toshiba Scorpion, dinamai demikian karena bentuknya (judul foto). Ini dikembangkan untuk tugas yang sangat sulit - untuk mempelajari bagian bawah reaktor dan mencari batang bahan bakar, dan misi ini melibatkan bekerja dengan latar belakang radiasi yang sangat besar. Scorpion tidak menggunakan kaki, yang digantikan oleh trek, dan untuk kekompakan, desainnya lipat - mobil seharusnya dilemparkan ke dalam reaktor melalui lorong-lorong untuk memuat batang bahan bakar. Dalam mode operasi, robot mengangkat manipulator ekornya, bergerak di sepanjang tiga sumbu dengan cara kalajengking, di ujung mana kamera dan LED backlight diadaptasi bukannya sengatan. Kamera lain dipasang di bagian depan dan selalu melihat ke depan.
Scorpion dikendalikan oleh operator melalui kabel, sehingga tidak ada masalah dengan transmisi daya dan sinyal. Selain itu, robot dibuat kembali, tidak boleh tetap di reaktor setelah kesaksian dikirimkan. Memberi tip padanya tidak takut, "ekor" dengan kamera mengembalikan robot ke posisi normal.
Selama beberapa tahun, Scorpion diselesaikan untuk akhirnya masuk ke dalam FAES - seiring waktu, ia menerima meriam air kecil untuk membersihkan jalan setapak, ember dan pemotong untuk bekerja dengan corium. Pada Februari 2017, robot pergi ke reaktor, di mana dia mengukur latar belakang dan merekam video. Dosimeter menunjukkan 210 Sv / jam (21.000 R) yang mengesankan. Di kamar sebelah, di mana ada pekerja memuat robot ke dalam pipa, latar belakangnya adalah 6 mSv / jam.
ROV: kapal selam kecil
 Kapal selam kecil dengan kamera video, yang memiliki harapan tinggi. Sumber: Toshiba
Kapal selam kecil dengan kamera video, yang memiliki harapan tinggi. Sumber: Toshiba
Alat bawah air yang dikendalikan dari jarak jauh, atau disingkat ROV, adalah robot terapung Toshiba pertama yang dibuat untuk mempelajari reaktor unit daya ketiga, yang bagian bawahnya tersembunyi di bawah kolom air enam meter. Kapal selam kecil ini dengan dimensi 30 x 13 cm dan berat 2 kg membawa dua kamera dan lampu latar, dikendalikan oleh kabel dan dapat bergerak di bawah air ke segala arah dengan akurasi tinggi. Perangkat dikendalikan oleh operator, dan sinyal serta daya disuplai melalui kabel panjang. Untuk mencegah kawat kusut dan menempel pada puing-puing, Toshiba mengembangkan lapisan khusus dengan gesekan minimal, dan dua mesin kuat dipasang pada ROV itu sendiri, sehingga robot dapat dengan mudah menarik kabel bersamanya.
Ngomong-ngomong, diameter ROV 14 cm adalah karena lubang masuk yang sempit di kapal reaktor dari unit daya ketiga, sehingga insinyur Toshiba harus bekerja keras untuk menyesuaikan elektronik, perlindungan dan mesin ke dalam casing yang sedemikian kompak. Pada akhir kursus pelatihan intensif selama dua bulan untuk operator, Toshiba ROV pergi ke FAES. Robot mengunjungi reaktor pada 19, 21 dan 22 Juli 2017 dan berhasil memeriksa isi perut yang hancur.
Magnetik SC-ROV
Tempat lain yang tidak dapat diakses di mana air dengan radionuklida terakumulasi adalah ruang pelepas tekanan toroidal yang terletak di bawah reaktor. Itu perlu untuk mengirim robot untuk mencari kebocoran di bawah kamera, tetapi masalah ini rumit oleh kenyataan bahwa penahanannya dibanjiri - robot diminta untuk memeriksa pipa yang terbenam dalam air berlumpur. Alat pengapung tidak cocok untuk ini, diperlukan sebuah probe yang akan diperbaiki pada pipa dan dapat berjalan sepanjang tanpa meluncur bahkan pada sudut yang besar.
Bagaimana cara memperbaiki robot pada pipa baja sehingga tidak menggulung? Dengan bantuan magnet. Toshiba SC-ROV dirancang khusus untuk ruang pelepas tekanan. Ini adalah sasis dengan roda yang terbuat dari magnet neodymium yang kuat. Dengan menggunakan empat kamera dan spidol, operator dapat bergerak di sepanjang permukaan pipa yang terendam air dan menandai lubang yang ditemukan.
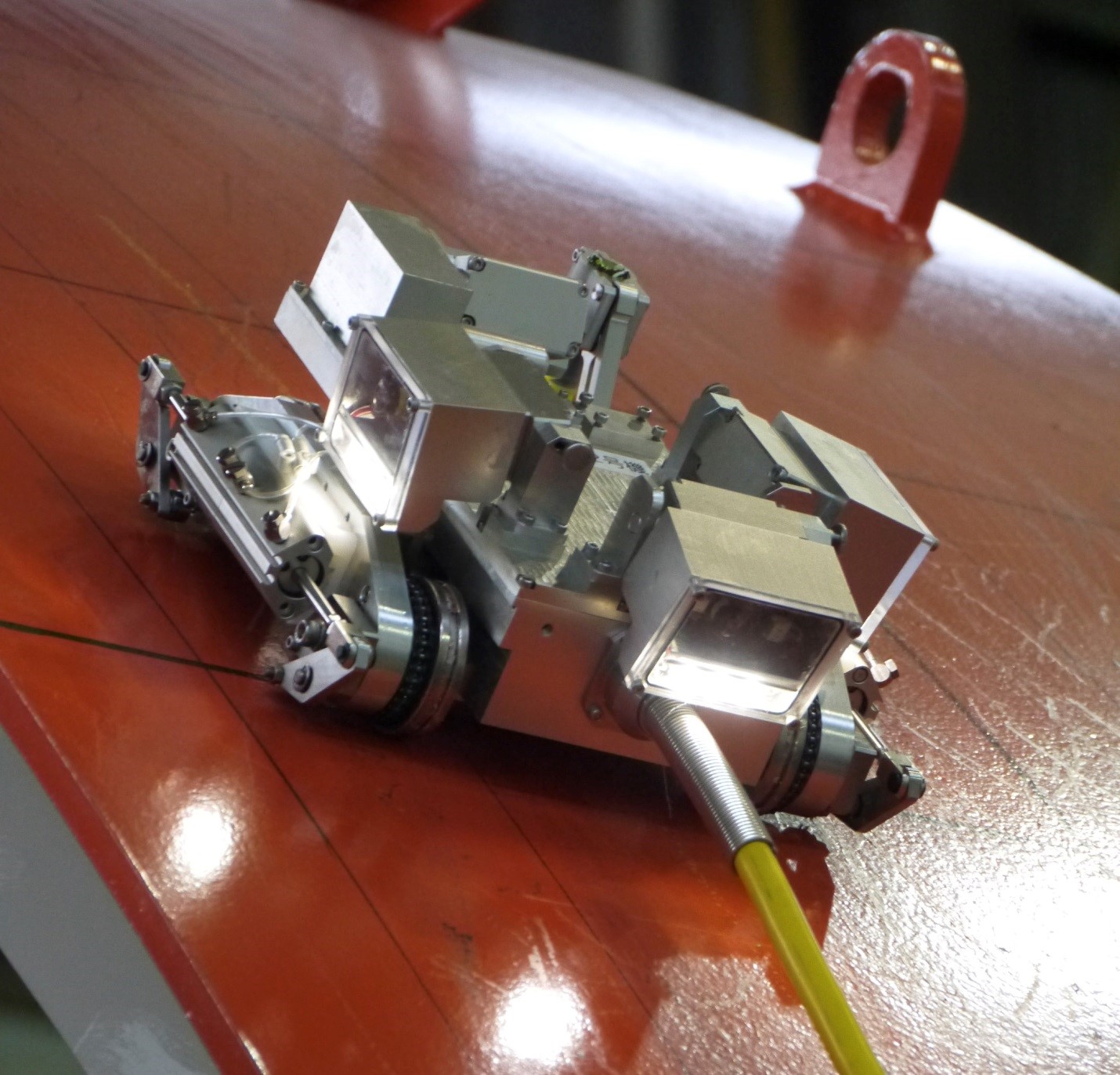 Selama demonstrasi, SC-ROV memegang magnet dengan sempurna ke permukaan miring. Tetapi kondisi sebenarnya jauh lebih sulit. Sumber: IRID
Selama demonstrasi, SC-ROV memegang magnet dengan sempurna ke permukaan miring. Tetapi kondisi sebenarnya jauh lebih sulit. Sumber: IRID
Menurut hasil SC-ROV pada tahun 2014, tidak ada kebocoran yang ditemukan, tetapi masalah ditemukan dalam pengoperasian perangkat. Pertama, karena kekeruhan air, jangkauan visibilitas tidak melebihi 30-35 cm, yang secara signifikan memperlambat pencarian. Kedua, karena beberapa cacat pada permukaan pipa, robot tetap meluncur dari itu ketika dimiringkan ke 120 °.
Kamera Pencarian Corium
Misi pencarian sebelumnya telah menunjukkan gambar yang menyedihkan - bahan bakar nuklir di reaktor unit daya kedua telah melampaui kapal reaktor. Foto-foto dari perapian yang meleleh di bagian bawah wadah memastikan bahwa bahan bakar sudah ada di suatu tempat di bagian bawah. Tetapi apakah penahanan itu menahannya atau apakah corium itu tenggelam ke tanah? Itu perlu untuk mengirim robot baru ke "neraka" mantan reaktor untuk bahan bakar yang sangat memudar.
 Parut yang meleleh di dalam wadah reaktor kedua persis di atas drive batang sistem kontrol dan perlindungan. Sumber: TEPCO
Parut yang meleleh di dalam wadah reaktor kedua persis di atas drive batang sistem kontrol dan perlindungan. Sumber: TEPCO
Robot crawler hanya bekerja di lantai yang rata, dan kapal selam membutuhkan ketebalan air. Toshiba datang dengan kamera telecontrol yang dipasang di ujung tabung teleskopik lima meter. Terlepas dari sudut masuknya pipa ke kontainmen, kamera mengambil posisi yang benar-benar vertikal - unit utama dipegang oleh kabel kontrol, artinya, kamera tampaknya "tergantung pada kabel." Lensanya berputar 360 ° secara horizontal dan 120 ° secara vertikal. Bahkan, ada dua kamera pada perangkat sekaligus - langsung bekerja dan kamera untuk orientasi. Selain lensa, lampu latar, dosimeter, dan termometer dipasang pada unit. Perangkat menahan dosis yang diserap hingga 1000 abu-abu.
Versi pertama kamera bekerja di Fukushima pada Januari 2018, di mana ia berhasil menemukan corium dan mengukur latar belakang pada 530 Sv / jam (53.000 x-ray). Tapi pekerjaan itu tidak berakhir di sana - itu diperlukan untuk mengambil sampel untuk dianalisis. Dalam versi perangkat yang diperbarui, lampu latar ditingkatkan dan lengan geser ditambahkan. Pada bulan Februari 2019, kamera remote-control Toshiba pertama kali menerima sampel corium dari unit daya kedua.
Mesin pembersih
Tempat unit daya harus dinonaktifkan cepat atau lambat, tetapi pertama-tama Anda perlu membuat peta polusi. Hasil dari berbagai misi penelitian menunjukkan gambaran yang sangat suram: bertentangan dengan harapan, sebagian besar radionuklida menetap tidak di lantai atau di dinding, tetapi pada elemen tingkat atas, seperti pipa dan ventilasi - mereka menyumbang hingga 70% dari semua radiasi. Dekontaminasi lantai relatif sederhana, dindingnya sedikit lebih rumit, tetapi bagaimana Anda sampai pada kotoran di langit-langit dan di seluk-beluk pipa, mengingat ketinggian langit-langit di lantai pertama adalah 7-8 meter?
 "Pembersih" Toshiba radionuclide - tingginya 8 meter dan dengan rajin mengikis dinding. Sumber: IRID
"Pembersih" Toshiba radionuclide - tingginya 8 meter dan dengan rajin mengikis dinding. Sumber: IRID
Toshiba telah mengembangkan robot yang mengoperasikan meriam dengan es kering - bubuk es menutupi permukaan, mengikat partikel radioaktif, dan robot tersebut mengikisnya dan menyerapnya sendiri. Mekanisme menaikkan struktur ke ketinggian 8 meter. Karena ini adalah mesin telecontrolled lain, operatornya menerima gambar dari 22 kamera pada saat yang sama. Mesin mulai membersihkan unit daya pada Januari 2016. Produktivitasnya kecil, tetapi bahkan kontribusi kecil untuk dekontaminasi stasiun sangat berharga.
Membantu tetapi bukan solusi
33 tahun telah berlalu sejak kecelakaan di pembangkit listrik tenaga nuklir Chernobyl, sejak itu teknologi telah membuat terobosan luar biasa. Sekarang puluhan robot dan jenis peralatan konstruksi telecontrolled berpartisipasi dalam penghapusan konsekuensi di Fukushima. Situs web TEPCO telah memposting banyak laporan, data yang darinya secara keseluruhan membentuk gambar yang sangat menyedihkan: ada robot dan ada teknologi, tetapi semuanya tidak mendekati keefektifan likuidator Chernobyl. Pengembangan dan pengujian robot membutuhkan waktu berbulan-bulan dan bertahun-tahun, dan hasil pekerjaan mereka meningkat selusin meter, pengumpulan data dosimetri, video berlumpur dan seringnya pemutusan misi karena masalah yang tidak terduga.
Setiap robot di Fukushima adalah orang yang diselamatkan, dan setiap nyawa manusia layak untuk terlibat dalam pengembangan robot. Tetapi rencana TEPCO saat ini memperjelas bahwa, menurut perkiraan konservatif, itu akan memakan waktu setidaknya 30-40 tahun untuk menangani konsekuensi dari kecelakaan itu. Dan ini hanya menegaskan kepahlawanan dan skala prestasi likuidator Soviet Chernobyl.