
Para kru berangkat ke ISS pada 20 Juli 2019, melewati sesi pelatihan dengan robot FEDOR di pusat pelatihan kosmonot (CPC).
Sebagai kelanjutan dari publikasi ini:
Menetas pesawat ruang angkasa Soyuz MS-14 ternyata sempit untuk robot FEDORCara memodifikasi robot FEDOR dan kursi penerbangan ISSPara kru sekarang pindah ke ISS, minggu ini ISS kembali ke Bumi dari ISS: kosmonot Rusia Oleg Kononenko, David Saint-Jacques Kanada dan Anne McClain dari Amerika.
Sekarang di stasiun ada: Alexey Ovchinin (Rusia), Tyler Nicholas Haig dan Christina Koch (keduanya dari Amerika Serikat).

20 Juli 2019 direncanakan untuk mengirim ISS ke atas awak pesawat ruang angkasa Soyuz MS-13 yang terdiri dari: Alexander Skvortsov, Andrew Morgan dan Luca Parmitano.
Dengan demikian, dua kosmonot Rusia Alexander Skvortsov dan Alexei Ovchinin akan bekerja dengan robot FEDOR pada ISS, dan kolega asing mereka akan membantu mereka.

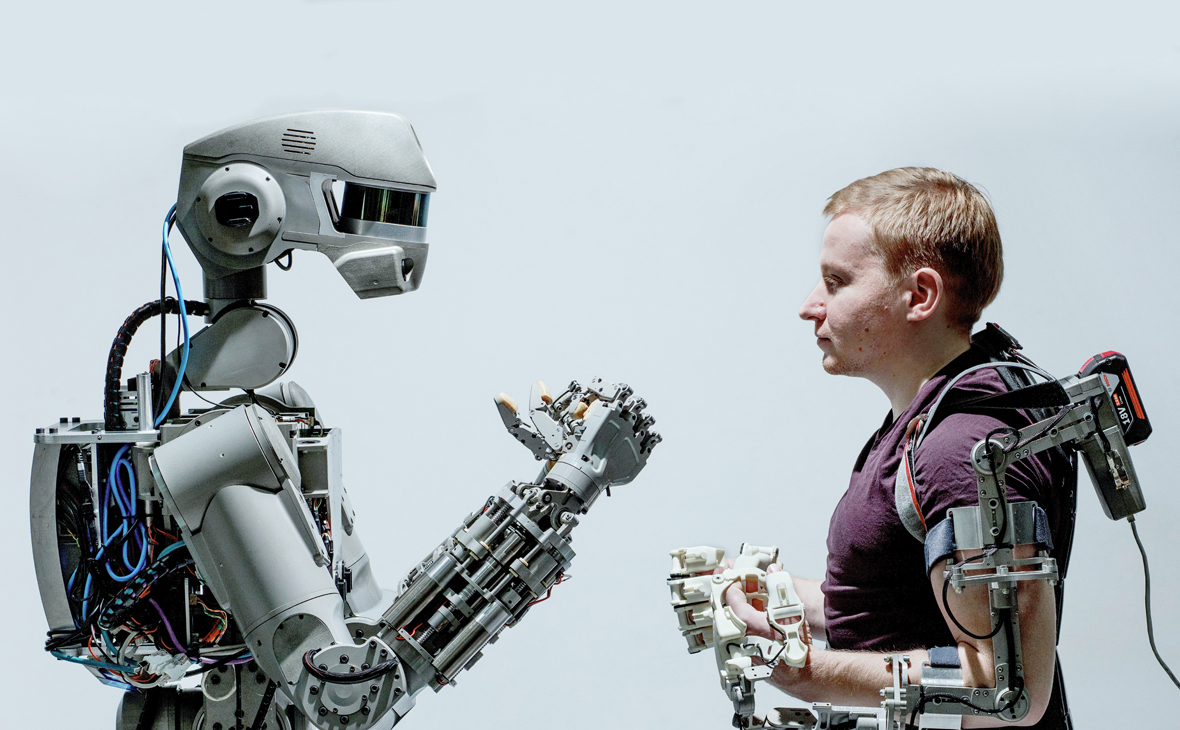
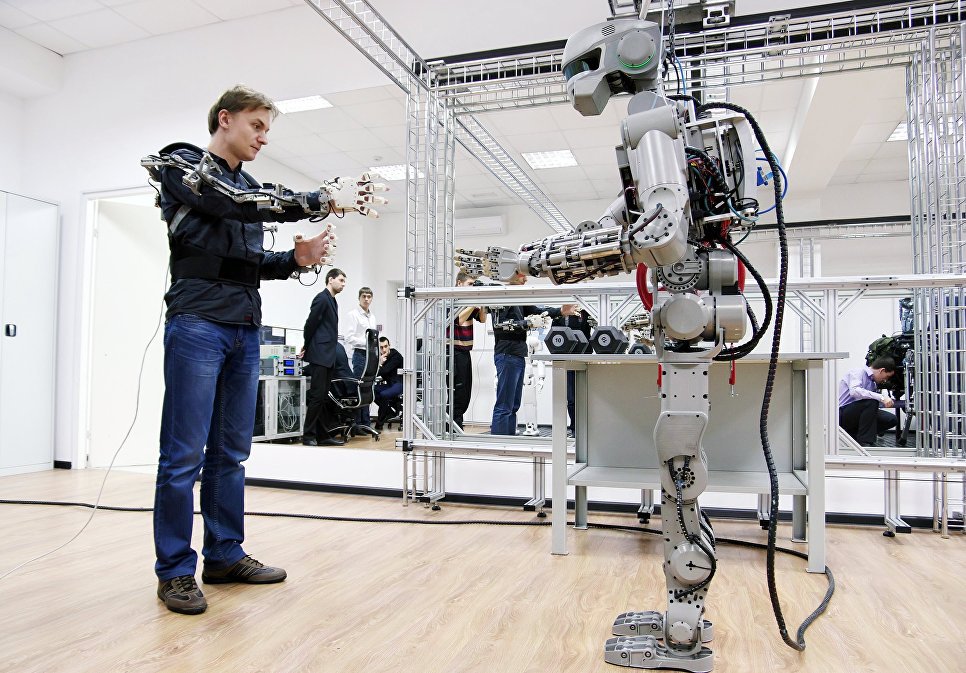
Sesi pelatihan pelatihan pertama dengan sistem kontrol robot FEDOR telah diadakan di Star City, termasuk studi tentang cara mengoperasikannya dalam gravitasi nol.
Berdasarkan hasil dari acara pelatihan ini, kru ISS baru memiliki komentar pada beberapa elemen robot FEDOR, yang akan dihilangkan oleh pengembang dan insinyur dari Roscosmos dan RSC Energia sebelum penerbangan.
 “Kami memiliki kelas dengannya, tugas ini muncul sangat tidak terduga, saya harus menyelesaikannya segera. Ada beberapa komentar tentang persiapan, tetapi ini adalah komentar yang dipahami oleh astronot yang tahu apa itu bobot. Ini adalah beberapa nuansa, saya yakin mereka akan dihilangkan dan saya berharap bahwa hasil dari bekerja dengan FEDOR akan menjadi positif dan menarik, dan pancake pertama tidak akan kental. Anda akan melihat ini dari pembuatan film kami
“Kami memiliki kelas dengannya, tugas ini muncul sangat tidak terduga, saya harus menyelesaikannya segera. Ada beberapa komentar tentang persiapan, tetapi ini adalah komentar yang dipahami oleh astronot yang tahu apa itu bobot. Ini adalah beberapa nuansa, saya yakin mereka akan dihilangkan dan saya berharap bahwa hasil dari bekerja dengan FEDOR akan menjadi positif dan menarik, dan pancake pertama tidak akan kental. Anda akan melihat ini dari pembuatan film kami , ”kata astronot Alexander Skvortsov, tanpa merinci sifat komentar tersebut.
Robot FEDOR pada ISS akan dikontrol dalam mode avatar. Sekarang kosmonot Alexander Skvortsov hanya melatih dan menjalani pelatihan untuk mempelajari penggunaan robot, belajar mengendalikan gerakannya dengan bantuan setelan khusus yang menangkap gerakan manusia dan memindahkannya ke sensor robot.
"Ternyata itu dalam rezim seperti avatar," kata Alexander Skvortsov, menjawab pertanyaan apakah FEDOR akan menjadi mekanisme android pertama di stasiun.
“Dia (FEDOR) efisien, tapi mari kita tetap sedikit intrik. Tugas yang berdiri di depannya berkurang, tidak akan ada banyak waktu. Saya tidak akan menyuarakan tugas - apa yang akan saya lakukan, dan dia - harus dilakukan dengan saya. Sangat menarik, Anda akan melihat segalanya, "Aleksanr Skvortsov tertarik.
Ternyata ISS telah menyiapkan tempat untuk robot FEDOR, sehingga penempatannya di stasiun dan commissioning tidak akan memakan banyak waktu.
Setelah docking, ia akan dipindahkan dari kapal ke segmen stasiun Rusia.
Catu daya robot FEDOR selama penerbangan di dalam pesawat ruang angkasa Soyuz dan pada ISS akan dilakukan dari baterai eksternal, dan bukan melalui kabel dari sistem kelistrikan kapal dan stasiun.
Pada gilirannya, kepala Cosmonaut Training Center (CPC) Pavel Vlasov mengkonfirmasi bahwa percobaan utama dengan robot FEDOR akan dilakukan oleh kru yang berangkat ke ISS pada 20 Juli 2019, sesuai dengan jadwal kerja.
"Dari yang baru, apa yang akan dievaluasi awak untuk pertama kalinya, dan kami akan mengamati kemungkinan fungsi sistem robot serius pertama seperti robot FEDOR ," kata Pavel Vlasov, berbicara tentang tugas ekspedisi berikutnya ke ISS.
Dalam kondisi ISS, para astronot akan mengevaluasi kebenaran perhitungan desain ketika membuat robot FEDOR dan prospek untuk pelaksanaan proyek ini untuk memberikan dukungan robot untuk kru stasiun dengan prospek penerbangan panjang.
Namun, sejauh ini belum ada
pembicaraan tentang robot FEDOR yang memasuki luar angkasa , tetapi sebenarnya menarik bagi para astronot untuk ini.
“Kami akan memakan gajah di beberapa bagian. Pertama-tama, itu dibuat persis sebagai dukungan untuk kru dalam kegiatan ekstra-kapal. Bergerak di permukaan stasiun dengan ukuran saat ini dengan lapangan sepak bola tidaklah mudah dan cepat. Dukungan dapat berupa transportasi dasar dari beberapa jenis alat, tetapi ada banyak aplikasi yang memungkinkan , ”kata Pavel Vlasov.
Sekarang kami sedang mengerjakan dan menyesuaikan rencana tugas yang harus dilakukan oleh robot FEDOR.
Sebelumnya, ia telah menetapkan pelaksanaan dua belas percobaan, namun, kemungkinan besar, hanya empat hingga enam tugas yang akan diulang robot FEDOR setelah orang tersebut akan dimasukkan dalam program akhir.
Saya ingin tahu apakah akan ada tugas yang, bersama dengan robot proyek Astrobee,
yang sudah ada di ISS , dapat diimplementasikan dengan FEDOR.
Tentang penerbangan robot FEDORSkema penerbangan dua hari akan diterapkan ketika meluncurkan pesawat ruang angkasa Soyuz MS-14 dengan robot FEDOR Soyuz-2.1a.
Peluncuran kendaraan pengangkut Soyuz MS-14 pada kendaraan peluncuran Soyuz-2.1a dijadwalkan pada Agustus 2019.
Penerbangan kapal akan berlangsung dalam mode tak berawak, yang akan meningkatkan muatan beberapa kali karena kurangnya beberapa instrumen dan rakitan yang diperlukan untuk memastikan kru bekerja.
Kapal tanpa awak Soyuz MS bukanlah modifikasi baru dari kapal berawak. Versi Soyuz MS ini dibedakan dari kapal serial yang biasa dengan sistem kendali gerak dan navigasi yang ditingkatkan (SUDN) dan penyempurnaan yang sesuai dari masing-masing sistem udara.
Selama penerbangan, sistem ini akan diuji, dan integrasi pesawat ruang angkasa Soyuz MS-14 dengan kendaraan peluncuran Soyuz 2.1a akan diuji.
Kendaraan peluncuran Soyuz-2.1a akan diganti sebagai sarana untuk mengantarkan orang ke orbit Soyuz-FG dengan sistem kontrol Ukraina. Stok rudal ini hampir habis.