Banyak jenis tanaman dan tanaman masih dikumpulkan hanya dengan tangan.
Insinyur dari University of Cambridge (Inggris Raya) menciptakan prototipe kerja pemanen robot yang dapat secara independen mengenali kepala selada utuh yang siap untuk dipotong, serta secara akurat memproses dan mengumpulkannya.
Untuk mengumpulkan hasil panen yang baik dalam mode otomatis, Anda perlu menyelesaikan beberapa masalah teknologi yang kompleks, seperti:
- posisi yang akurat dan benar di tempat pertemuan, sinkronisasi tindakan dengan kolektor lain;
- analisis dan pemilihan algoritma yang tepat untuk digunakan dengan budaya yang berbeda;
- pengakuan buah matang (daun, beri);
- pembuangan elemen yang rusak atau tidak berkecambah;
- Tangkapan akurat dan pemotongan tanaman siap panen tanpa kerusakan;
- pemilahan dan penumpukan tanaman yang dipanen;
- logging aksi dan kemampuan belajar mandiri;
- memeriksa kebenaran tindakan saat ini dan meminimalkan kerusakan pada situs pengumpulan.
Selain itu, perlu untuk melakukan semua tugas ini dengan kecepatan tinggi dan dalam kondisi dunia nyata yang terus berubah (angin, hujan, serangga, binatang, dan sebagainya).
Sekelompok insinyur di Universitas Cambridge berhasil memecahkan beberapa masalah ini dan menerbitkan penelitian mereka dalam pekerjaan ini:
Tautan ke artikel ilmiah di
Journal of Field Robotics .
Mereka menciptakan prototipe otonom kecil dari pemanen robot independen yang kecil dan sejauh ini, mampu menganalisis dan memilih elemen yang tepat untuk dipanen.
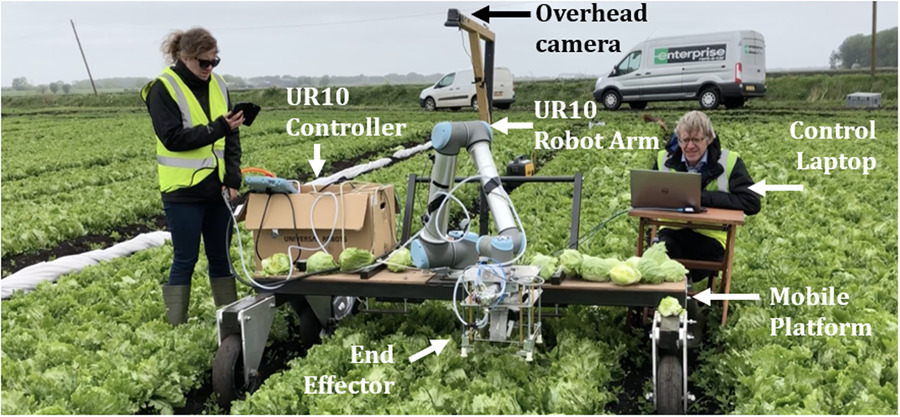
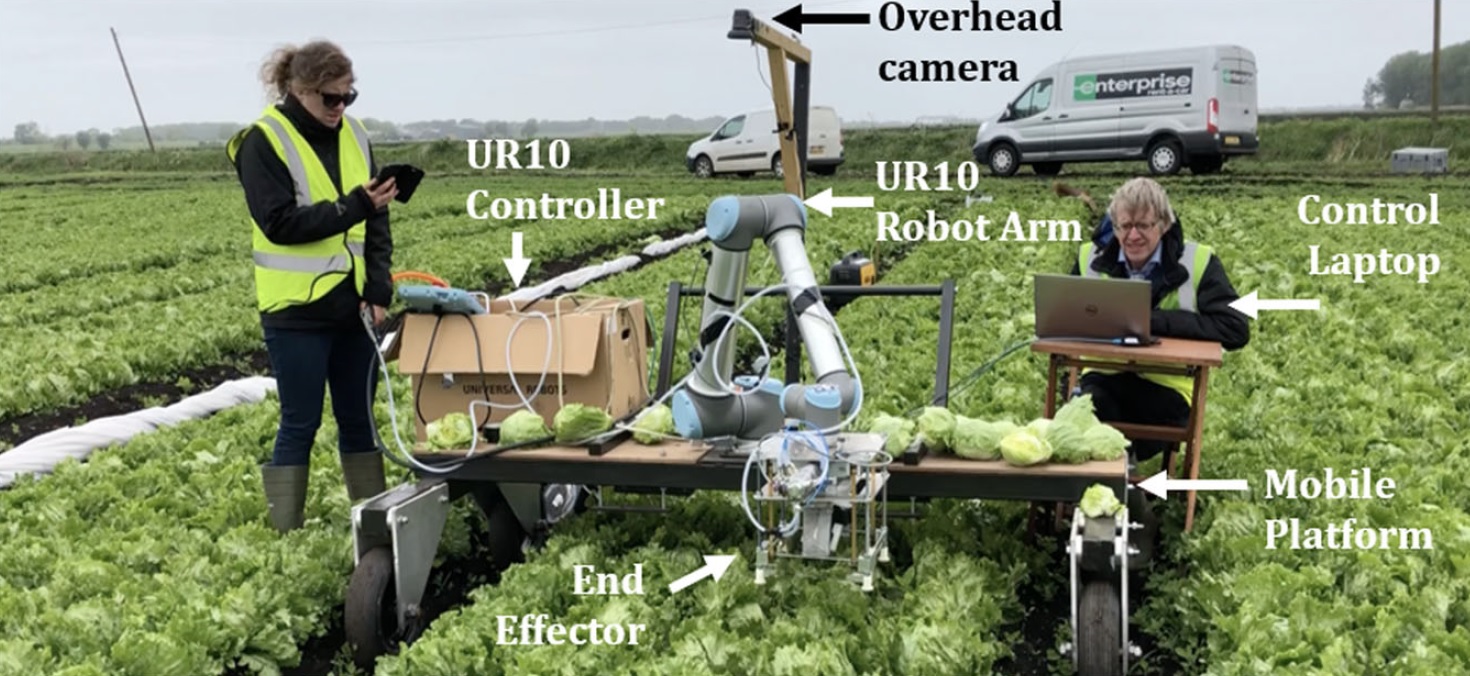
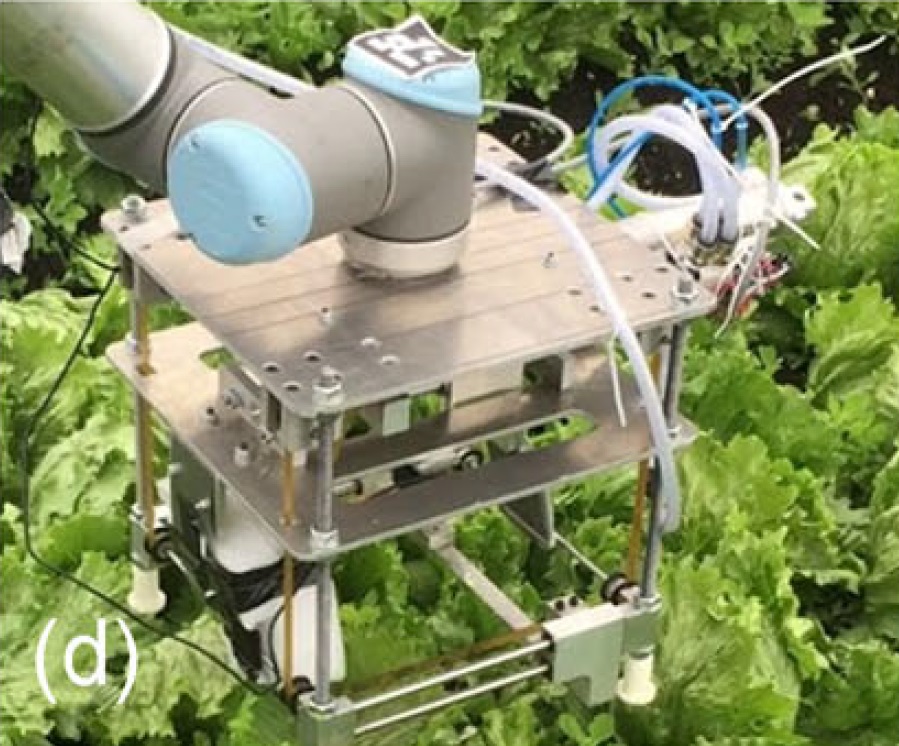
Robot-assembler ini adalah manipulator pada platform beroda dengan lebar satu tempat tidur. Manipulator dilengkapi dengan pegangan, pisau untuk memotong dan kamera video, kamera video tambahan terletak di bagian atas platformnya.
Karena ini hanyalah sebuah prototipe, yang untuk penggunaan massal akan ditingkatkan secara signifikan baik secara elemen maupun fungsional, para insinyur hanya memasang semua komponen robot yang mereka butuhkan untuk melakukan pengujian lapangan pada platform roda pasif, secara manual dipindahkan oleh operator.
Tugas mereka adalah mengajarkan robot untuk memahami proses panen dan mengotomatiskan tindakannya menggunakan pembelajaran mesin.
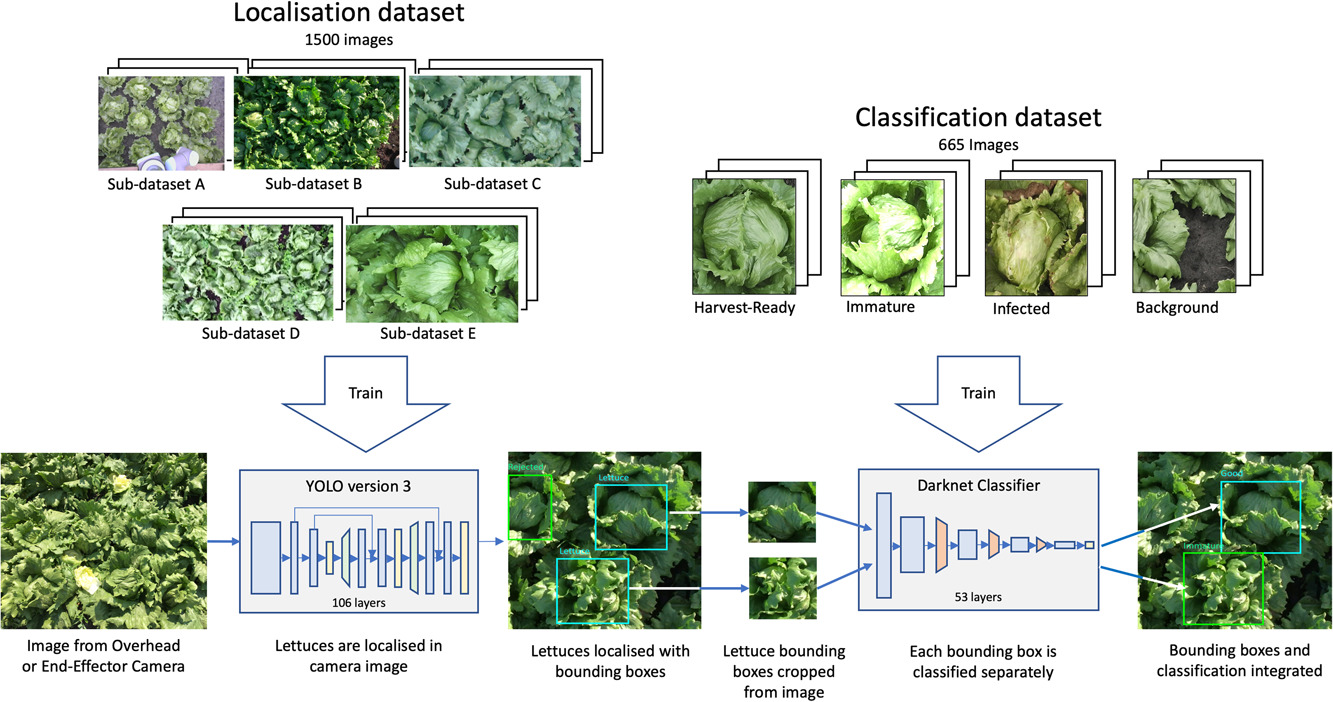
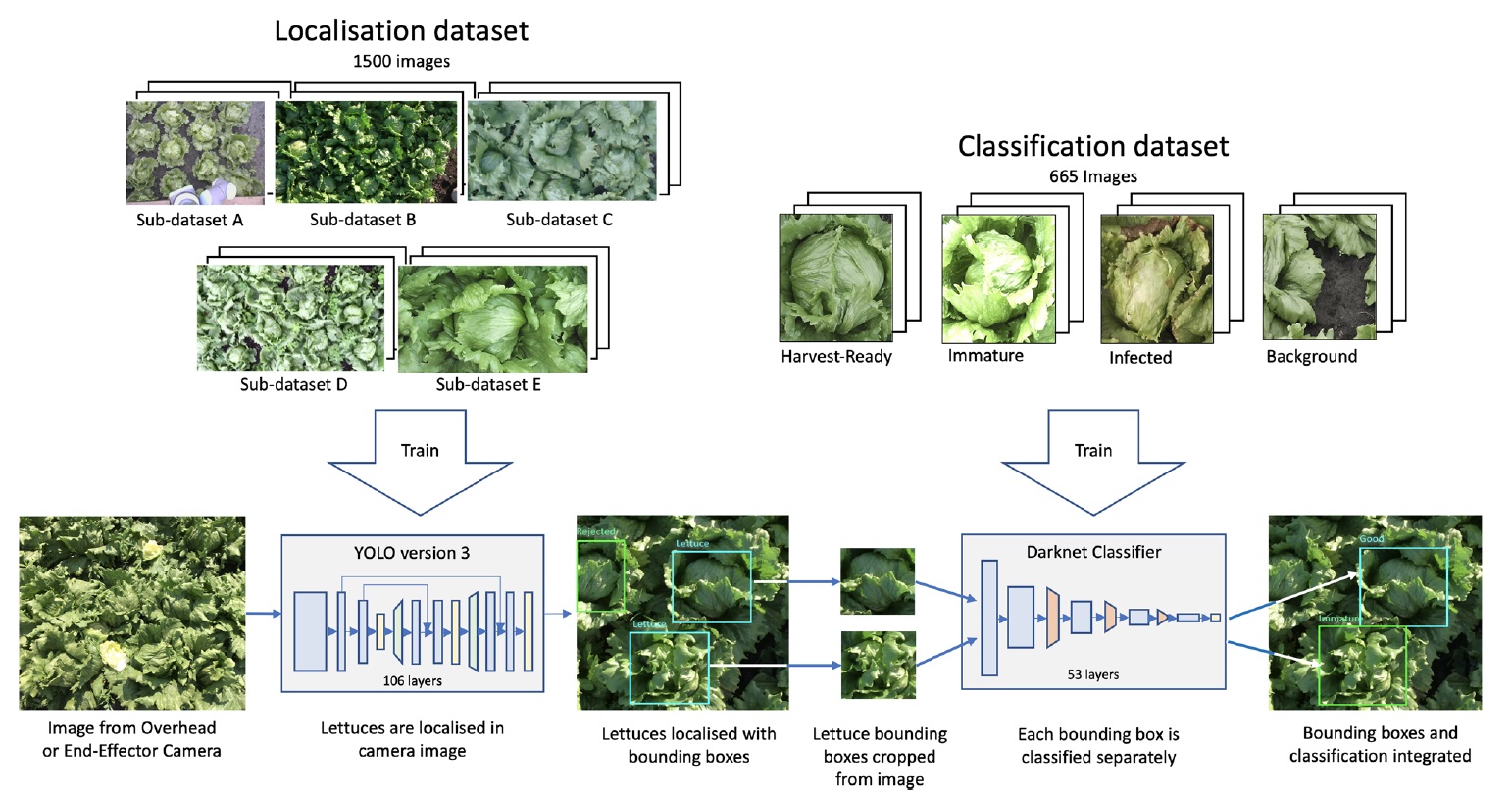
Setelah robot melewati kepala selada baru, proses pengenalan dan klasifikasi kepala selada diaktifkan menggunakan kamera video dan jaringan saraf.
Gambar dari kamera video pada manipulator dan platform digunakan untuk:
- lokalisasi kepala selada di depan kamera video - menggunakan jaringan saraf convolutional YOLO versi 3, untuk pelatihan yang menggunakan 1.500 foto;
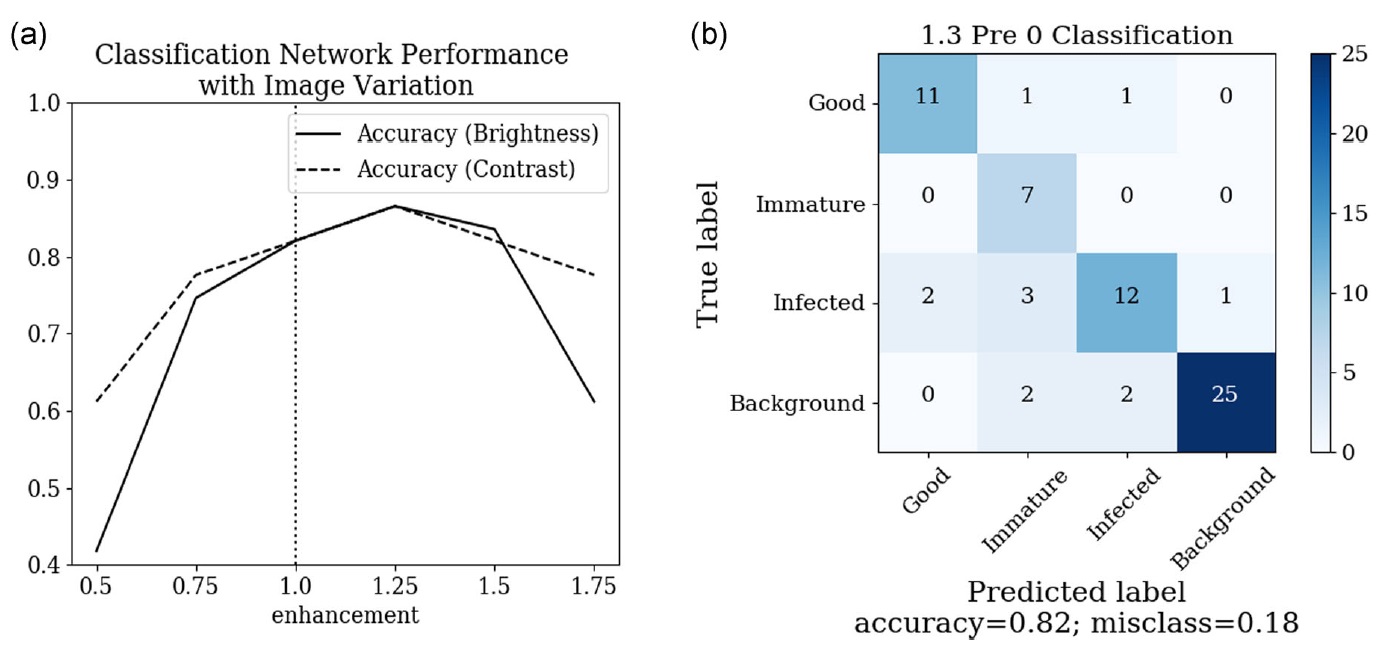
- Klasifikasi kepala selada menurut empat jenis (elemen matang, elemen mentah, elemen yang terinfeksi / rusak, menggunakan elemen) menggunakan jaringan nevolusi objek Klasifikasi Obyek Darknet Network, untuk pelatihan yang menggunakan 665 foto.
Uji coba lapangan dari robot rakitan telah menunjukkan bahwa ia mampu:
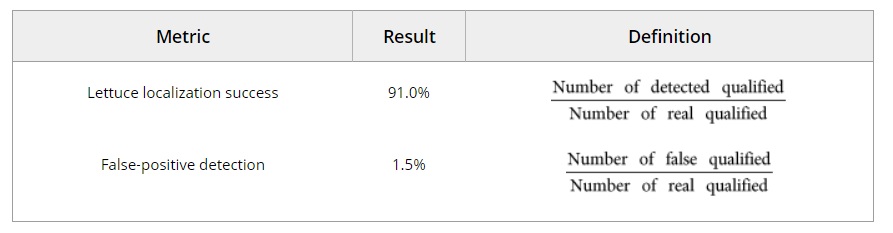
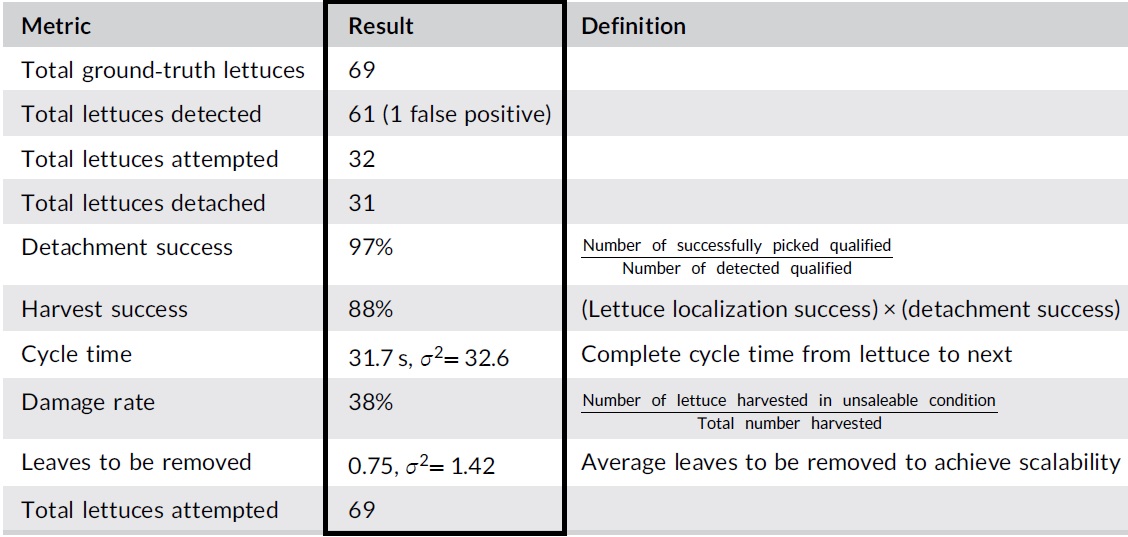
- mengidentifikasi kepala salad di depan Anda dengan akurasi 91%;
- mengklasifikasikan kepala selada dengan benar dengan akurasi 85%.
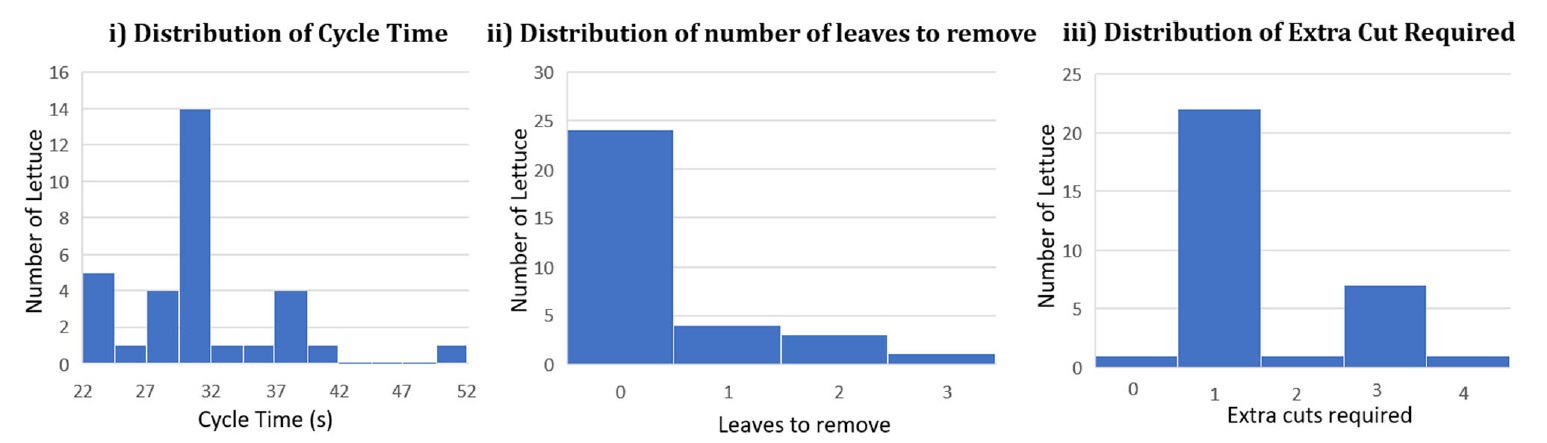
- waktu satu siklus kerja (transisi dari satu kepala selada ke yang lain) adalah 32 detik, yang banyak, tetapi saat ini masih akan diselesaikan.
Ternyata tempat tidur itu sendiri sangat ditumbuhi dan perkecambahan kepala selada sangat sulit untuk dilokalisasi dan diklasifikasi:

Oleh karena itu, salad dihapus secara manual dengan cepat, tetapi semuanya berturut-turut tanpa seleksi khusus dan cermat:

Dan sulit untuk membuat platform kecil dengan robot pembersih, karena perangkat harus dapat digerakkan, tetap cukup stabil di permukaan pada tanah yang longgar dan tidak menghancurkan tempat tidur dengan komponennya.
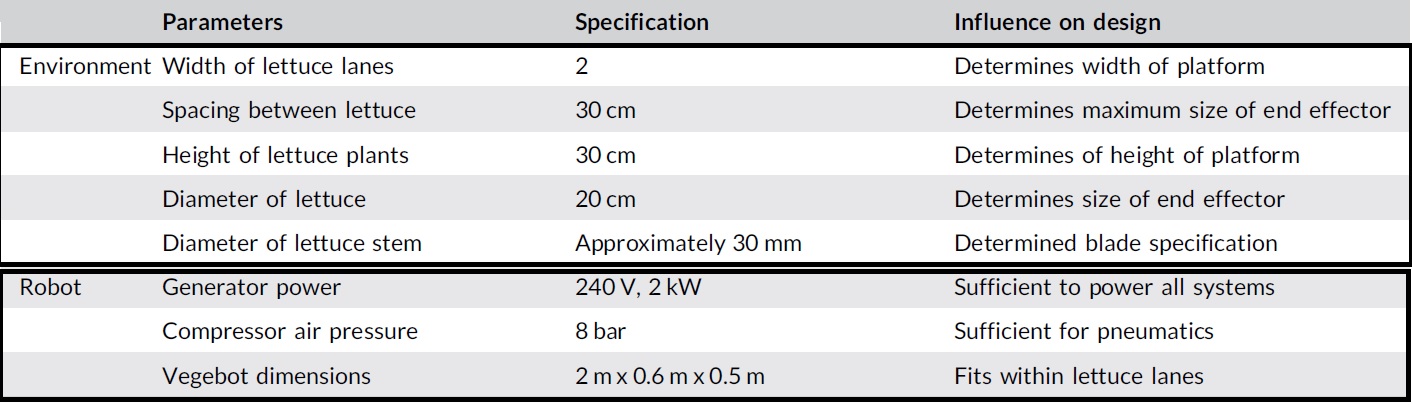
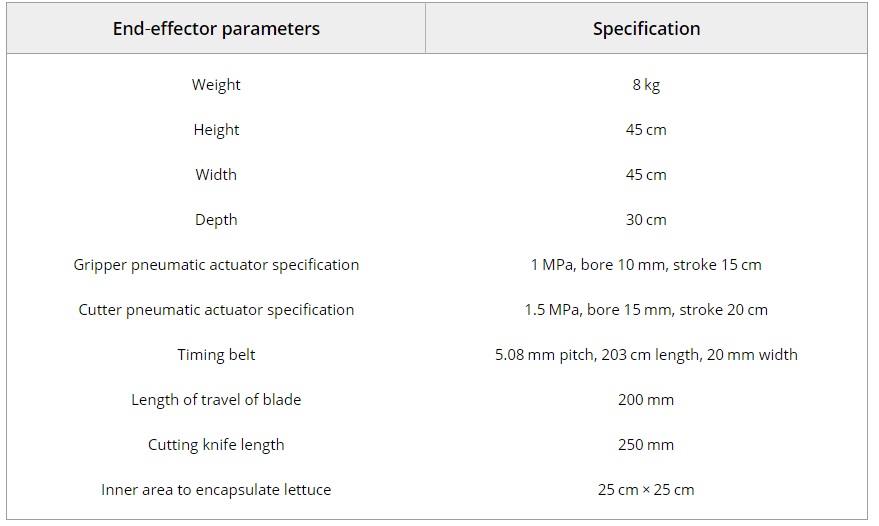
Berikut adalah batasan ukuran untuk elemen dan parameter robot perakitan prototipe:
Apa yang terjadi sebagai hasil uji coba lapangan setelah pertemuan:
Omong-omong, platform dengan robot itu disebut
Vegebot .
Diagram blok interkoneksi komponen platform Vegebot:
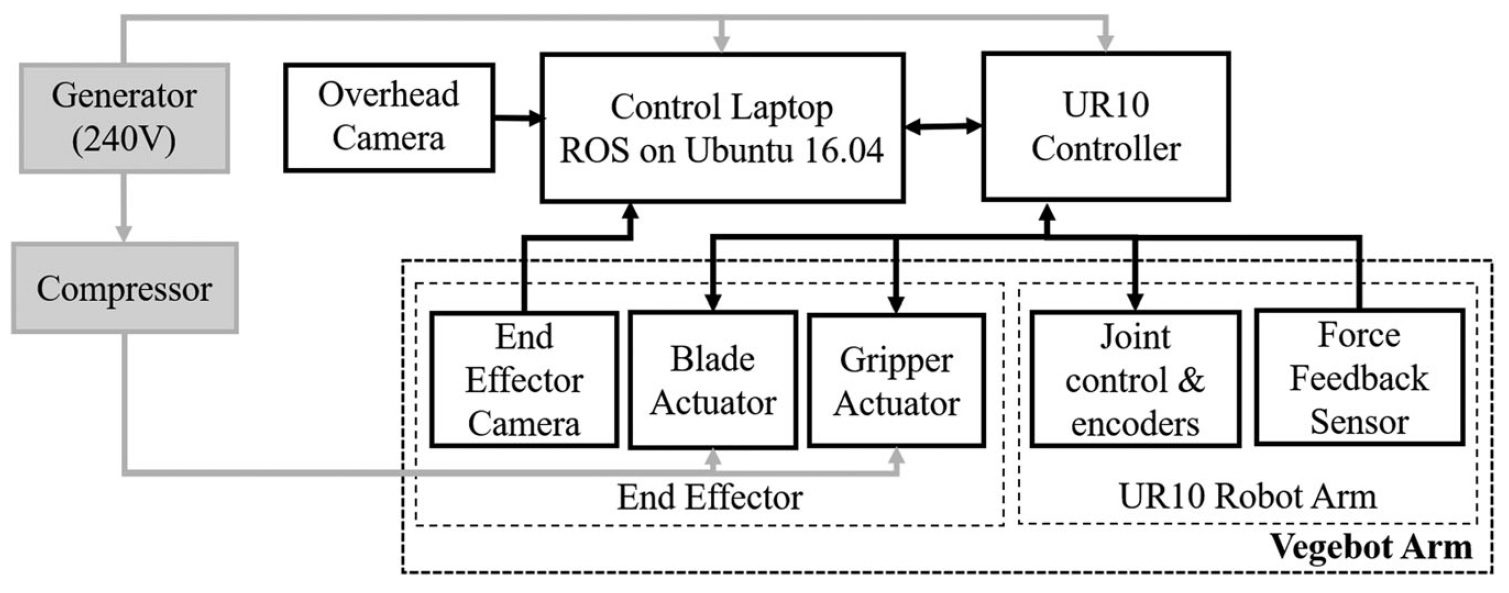
Selain itu, kedua kamera dalam solusi ini adalah webcam USB paling sederhana dan termurah.
Bagian perangkat lunak Vegebot (arsitektur dan antarmuka web), digunakan oleh Robot Operating System (ROS):
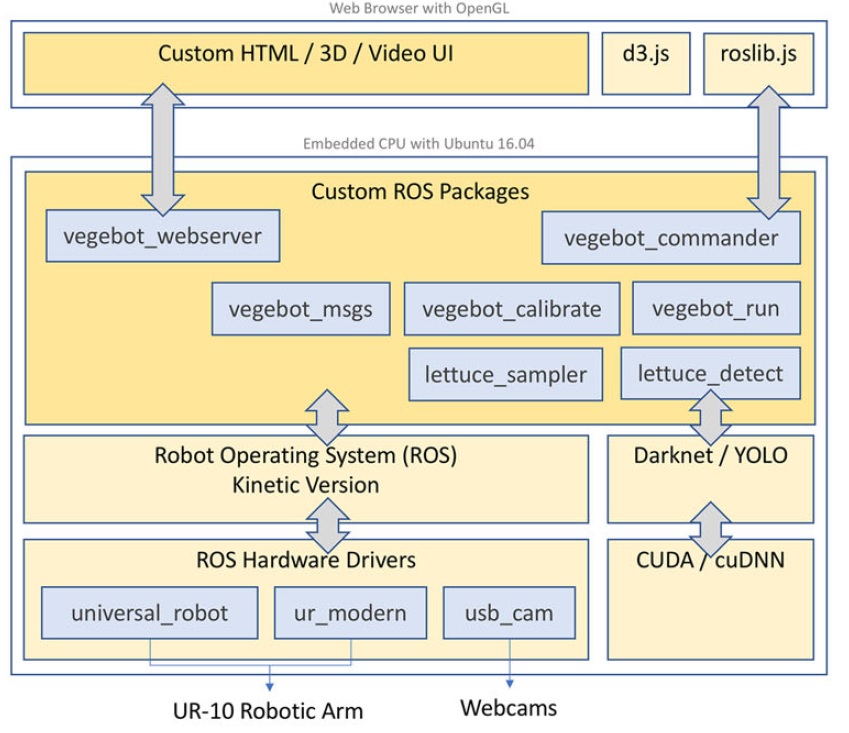
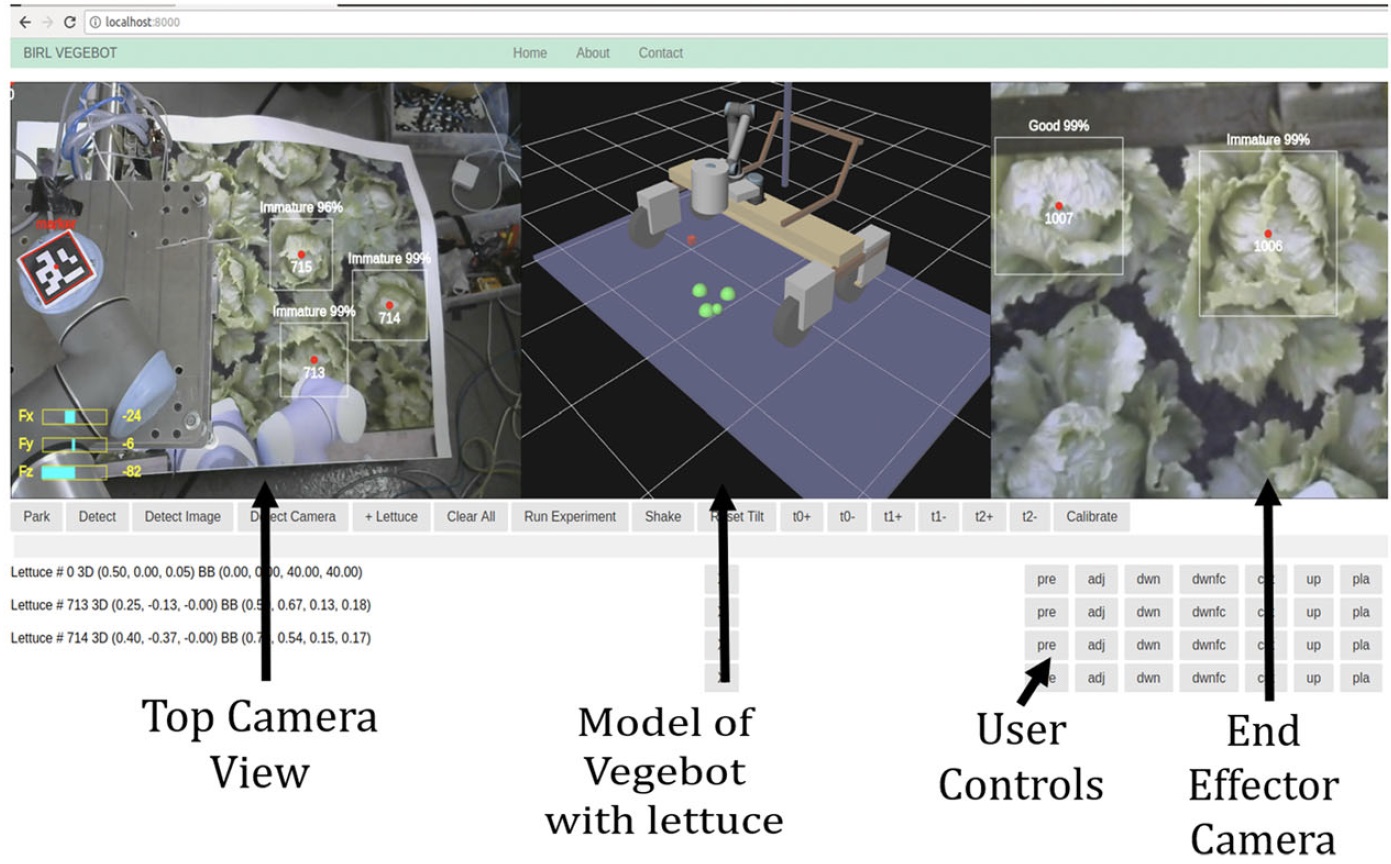
Diagram siklus kerja Vegebot (pelatihan, siklus pengumpulan):

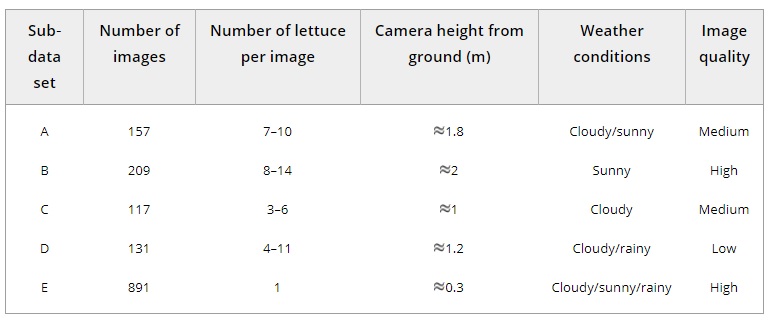
Persiapan untuk uji coba lapangan, studi tempat tidur dan analisis kepala selada dari ketinggian kamera yang berbeda:

Tapi apa tali pengikat untuk laptop! Memahami teknik dalam bisnis!

Meja dengan berbagai jenis foto untuk pelokalan kepala selada di depan kamera video (untuk pelatihan jaringan saraf convolutional YOLO versi 3):
Tabel dengan berbagai jenis foto untuk mengklasifikasikan kepala selada sesuai dengan empat jenis (elemen matang, elemen mentah, elemen yang terinfeksi, kurangnya elemen) untuk melatih jaringan saraf convolutional jaringan Darknet Object Classification Network:

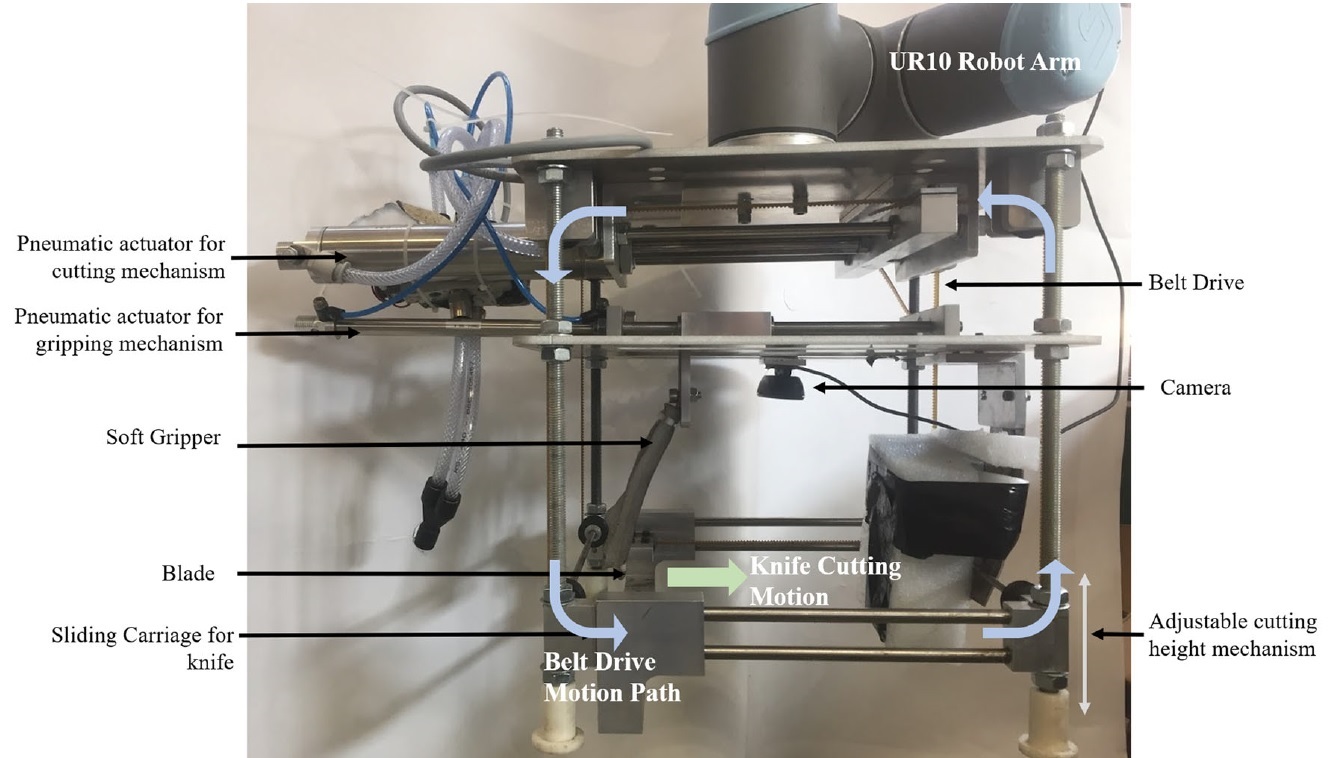
Mekanisme dan elemen opsi perantara Vegebot:

Kepala ganda untuk mengumpulkan kepala salad (ambil dan pisau):

Motor putar DC (kiri), penggerak linier dengan mekanisme pisau (kanan):

Pemotong pneumatik:
Versi terakhir dari mekanisme penangkapan dan pemanenan dengan drive sabuk dan sistem drive pneumatik ganda:
Fitur dan dimensi gripper Vegebot:
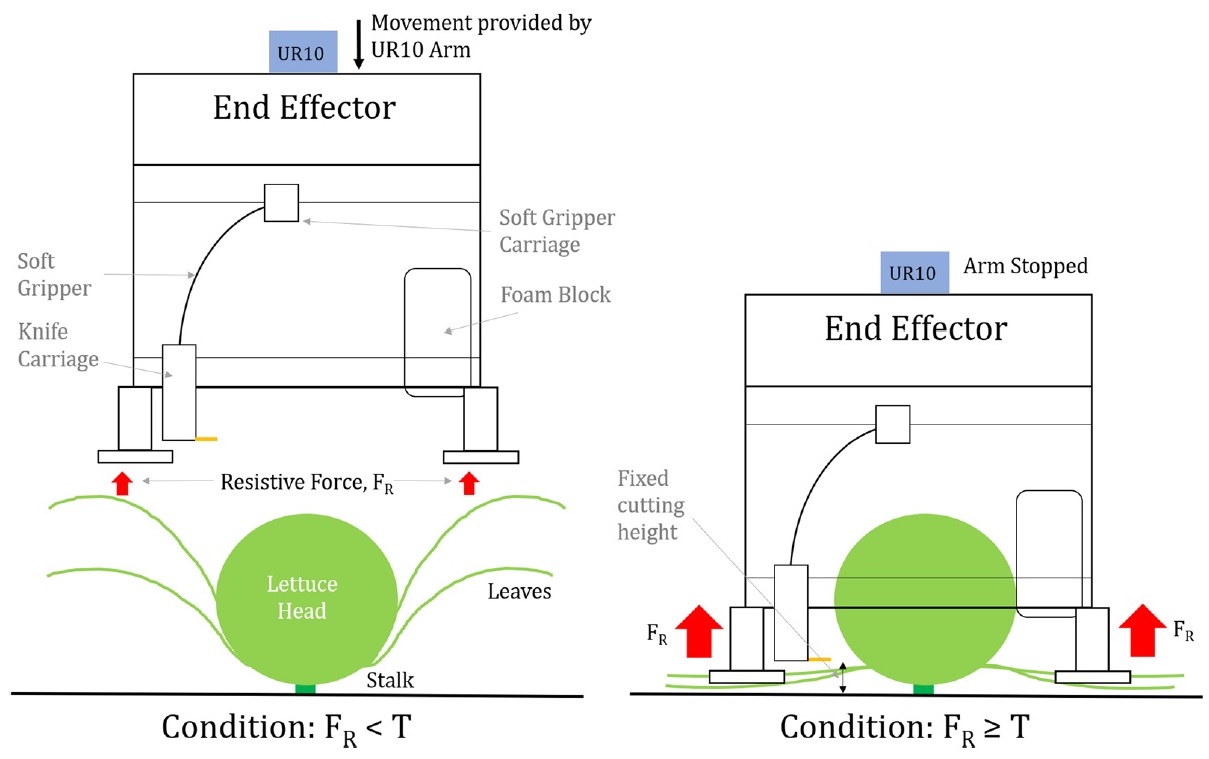
Prinsip operasi mekanisme penangkapan Vegebot (ambang batas gaya - T, gaya reaksi FR - ground):
Memposisikan mekanisme penangkapan Vegebot menggunakan dua kamera terpasang:
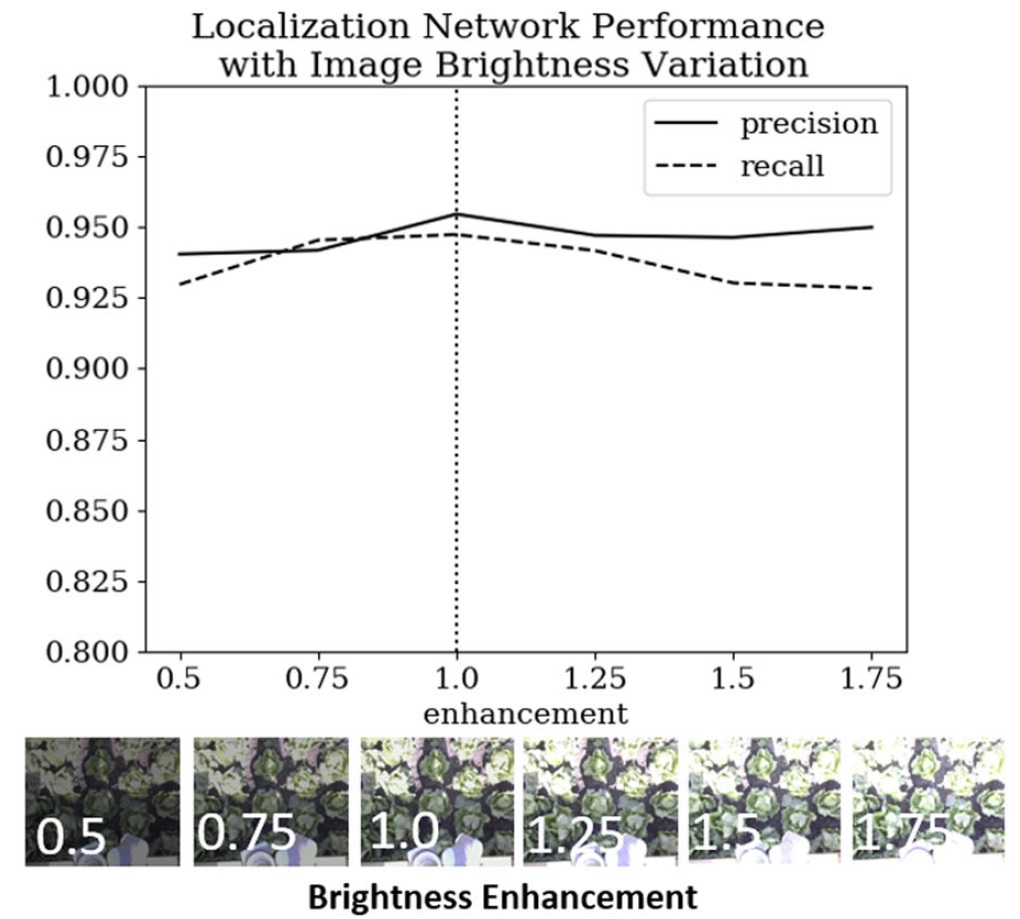
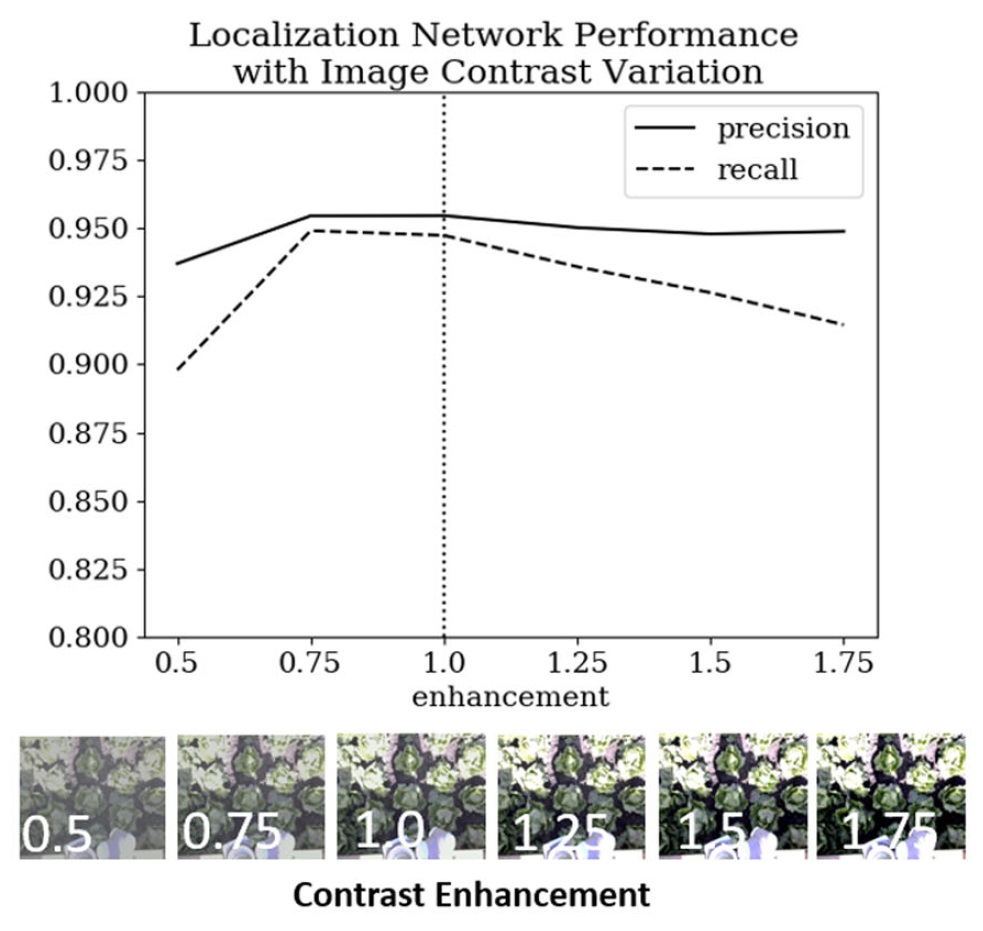
Kompensasi faktor pencahayaan eksternal dan parameter gambar dari kamera video untuk lokalisasi kepala selada yang optimal:
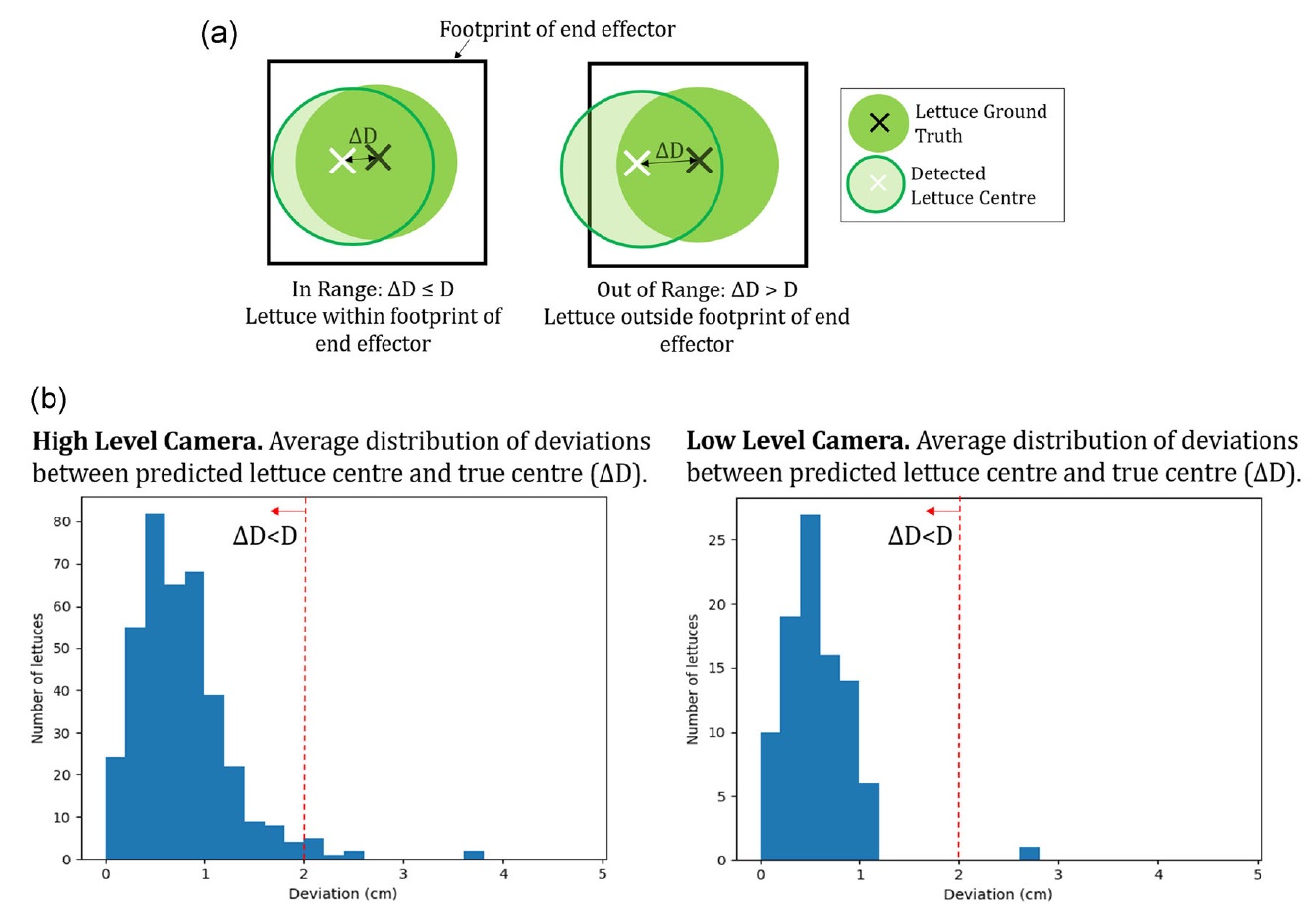
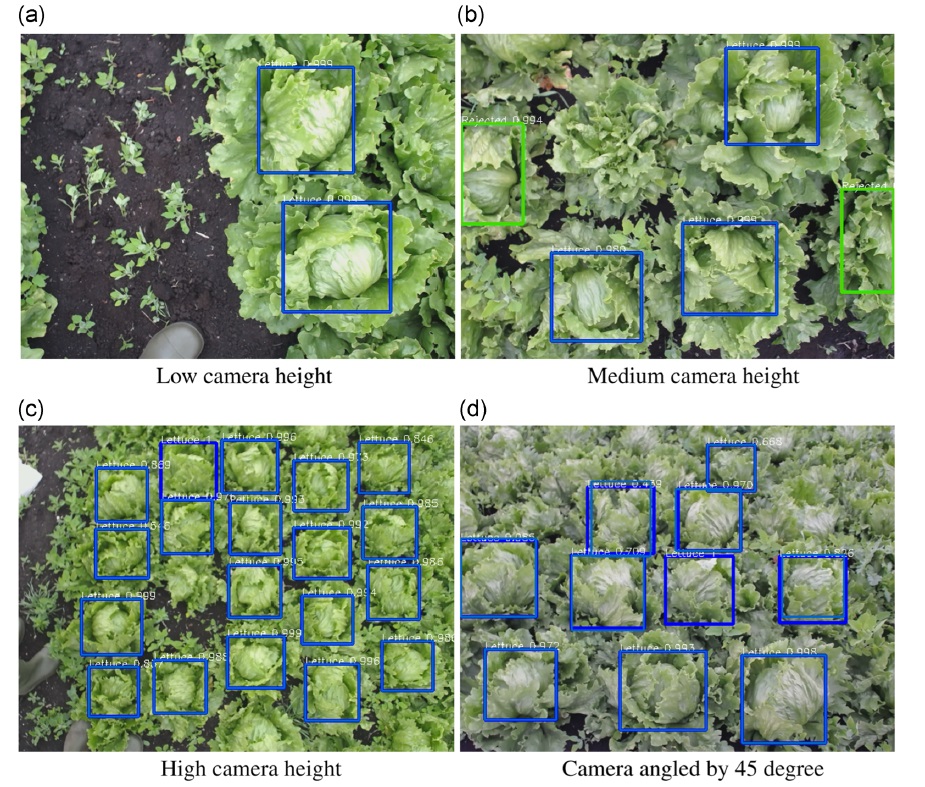
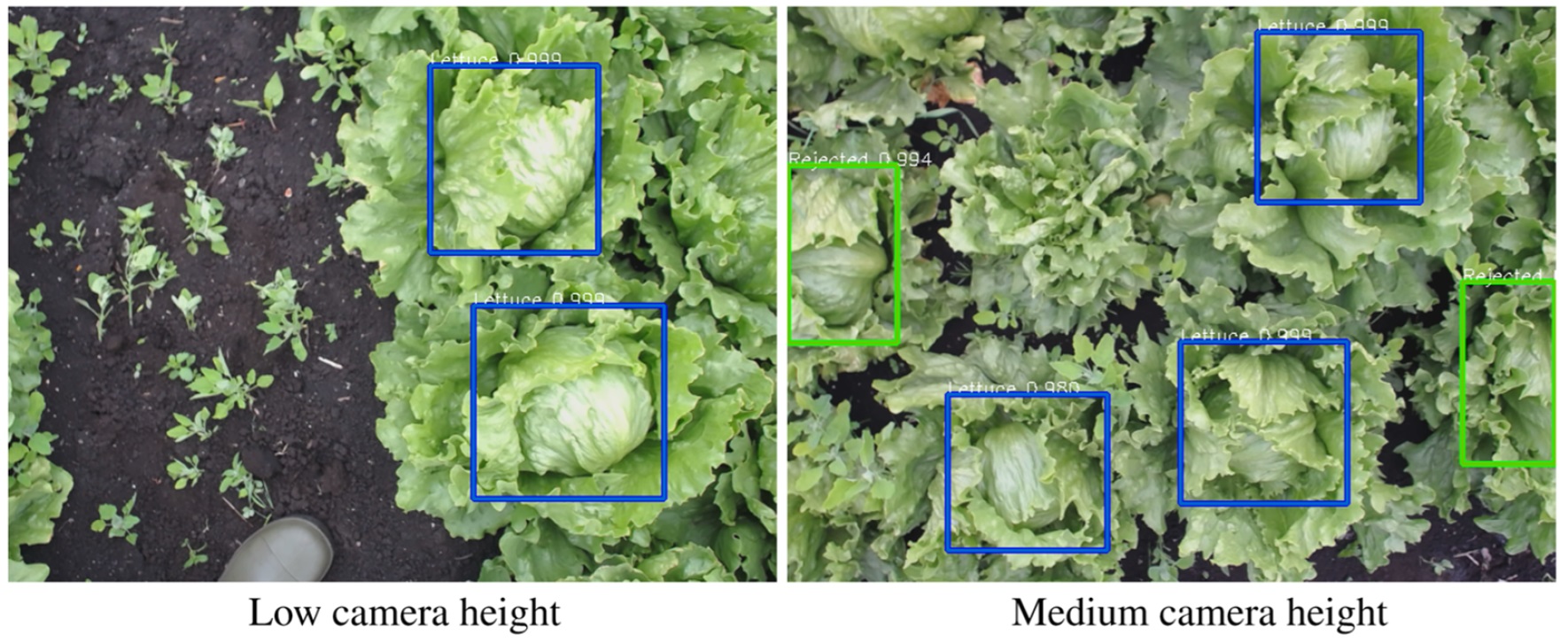
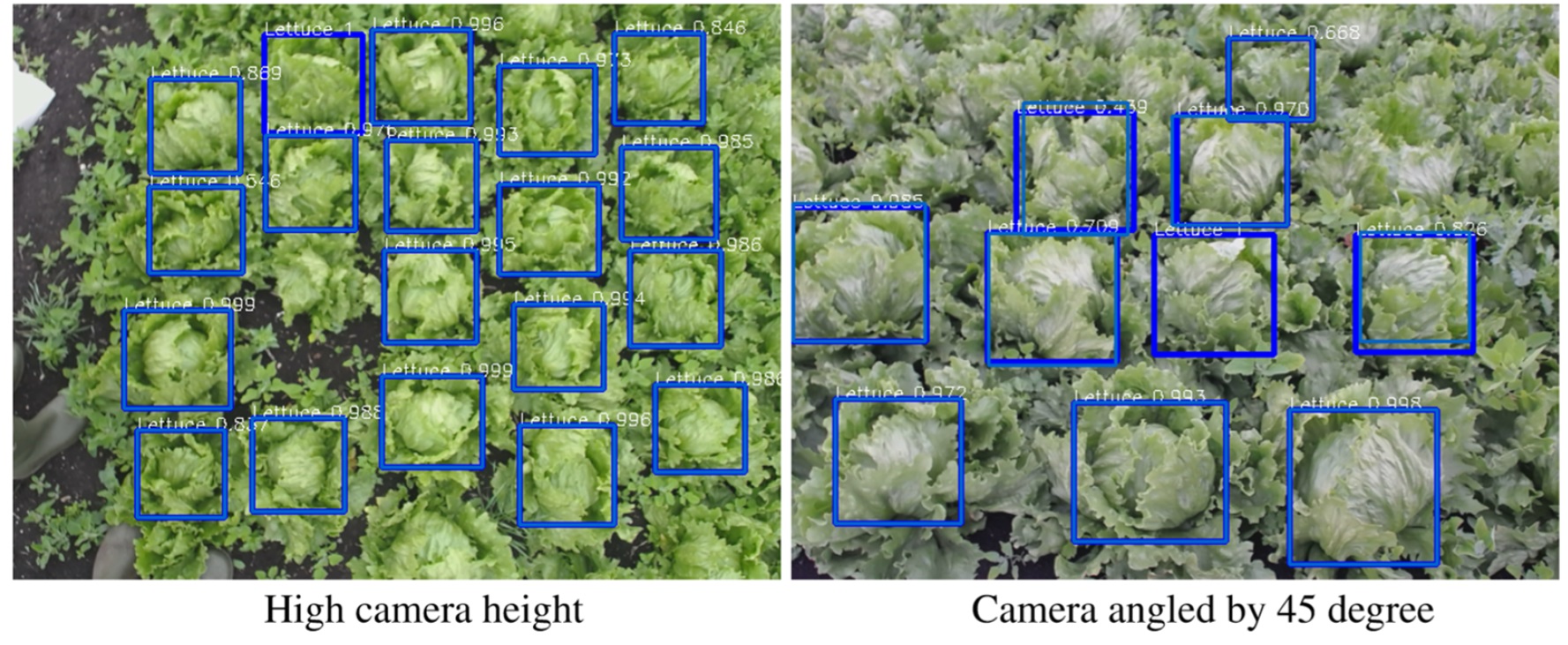
Contoh lokalisasi (pengenalan) kepala selada pada gambar dari kamera video pada ketinggian yang berbeda dan pada sudut yang berbeda:
Memperoleh data lapangan tentang pelokalan (pengenalan) kepala selada menggunakan Vegebot (berdasarkan pada 60 upaya yang dilakukan oleh Vegebot untuk mengenali kepala selada):
Parameter gambar dan matriks untuk klasifikasi kepala selada:
Waktu pengoperasian dan lintasan mekanisme penangkapan Vegebot:
Ada masalah dalam proses melakukan uji coba lapangan dengan menentukan jumlah daun yang tidak perlu (mencuat) pada daun selada setelah pengumpulan, yang harus dihilangkan.
Berikut adalah beberapa pilihan: kepala selada yang dipotong sempurna tanpa daun lengket, kepala selada dengan satu daun mencuat, kepala selada dengan dua daun mencuat, kepala selada dengan daun yang rusak.

Bergantung pada jumlah daun berlebih di kepala selada dan kebutuhan untuk mengenali dan menghapusnya, siklus tugas Vegebot juga berubah:
Rangkuman Total Prototipe Robot Pemanen Vegebot Ringkasan:
Tentu saja, prototipe ini masih jauh dari penggunaan pertanian industri, tetapi ini hanya awal dari penelitian.