
Entah bagaimana saya membutuhkan pompa air untuk produk-produk rumahan di masa depan. Ya, ini tidak sederhana - dengan batasan dimensi - ketebalan hingga 25mm, lebar hingga 50mm (panjang - Anda sudah dapat bervariasi). Dari karakteristik yang diinginkan - tekanan 1m dan laju aliran 100l / jam. Tidak menemukan apa yang dia inginkan dalam penjualan (terutama dalam hal ukuran), dalam sifat
keras kepala yang
keras kepala dia mulai menerapkan solusinya untuk masalah ini!
Perhatian - banyak foto!"Otak" dan sedikit latar belakang:
Sebenarnya, gagasan menggunakan motor HDD untuk pompa bukanlah hal baru. Sejak 2009, seluruh cabang telah dikelola di
satu forum terkenal . Jadi, awalnya ditujukan untuk membuat pompa dari hard drive "laptop" dan menemukan driver yang cocok dengan tombol daya terintegrasi dan kontrol sensorless.
Tapi "di luar kotak" saya tidak bisa belajar dari pengalaman. Serangkaian tes dengan driver yang berbeda (MTD6501C, DRV11873 dan sejumlah kerajinan Cina lainnya) memberikan hasil yang mengecewakan: motor yang lebih besar dari 3,5 drive bekerja dengan sempurna. Tetapi dengan motor kecil, paling-paling, mereka berhasil memulai unit, dan mereka bekerja sangat tidak stabil. Dengan hasil yang mengecewakan, sebuah ide lama ditinggalkan dan hampir terlupakan.
Tetapi relatif baru-baru ini saya menemukan driver yang agak menarik dari TI -
DRV10987 . Dengan dimensinya yang sederhana, ia memiliki potensi yang agak mengesankan:
- Tegangan operasi dari 6v ke 28v
- Konverter step-down 5v terintegrasi (Anda dapat memberi daya pada MK untuk kontrol)
- Arus pengoperasian konstan hingga 2A (puncak - 3A)
- Sejumlah besar parameter yang ditentukan perangkat lunak (pengaturan nilai register konfigurasi pada bus I2C) untuk mengontrol operasi motor
- Restart motor secara otomatis setelah berhenti / gagal darurat (jika kondisi untuk kegagalan telah lewat)
- Lebih dari perlindungan saat ini
- Perlindungan lonjakan
- Deteksi berhenti / kunci rotor
- Matikan saat pengontrol terlalu panas
Berbekal
arduinka (biarkan teknisi elektronik lokal memaafkan saya untuk ini) untuk mengatur parameter yang dibuat oleh papan LUT untuk driver ini, saya pergi lebih dalam ke eksperimen tentang memulai motor. Nah, controller ini tidak mengecewakan saya! Meskipun metode "poking ilmiah" yang diterapkan dalam pemilihan parameter, adalah mungkin untuk menemukan pendekatan untuk motor apa pun dari HDD!
Membantu saya dalam
konfigurator pengaturan online buatan sendiri ini. Gunakan untuk kesehatan!)
Berikut ini adalah sketsa tentang menuangkan parameter melalui Arduino:#include <Arduino.h> #include <Wire.h> #define I2C_DRV10983_Q1_ADR 0x52 #define Fault_Reg 0x00 #define MotorSpeed_Reg 0x01 #define DeviceIDRevisionID_Reg 0x08 #define SpeedCtrl_Reg 0x30 #define EEPROM_Access_Code_Reg 0x31 #define EEPROM_EeReady_Reg 0x32 #define EEPROM_Iindividual_Access_Adr_Reg 0x33 #define EEPROM_Individual_Access_Data_Reg 0x34 #define EEPROM_Access_Reg 0x35 #define EECTRL_Reg 0x60 void setup() { Serial.begin(9600); Wire.begin(); } byte readByAdress(byte reg_adr, unsigned int &result) { //I2C write 2-byte register byte i = 0, err = 0; byte bytes[2] = {0, 0}; Wire.beginTransmission(I2C_DRV10983_Q1_ADR); Wire.write(reg_adr); err = Wire.endTransmission(); if(err!=0) return err; Wire.requestFrom(I2C_DRV10983_Q1_ADR, 2); while(Wire.available()) { bytes[i] = Wire.read(); i++; } result = ((bytes[0] << 8) | bytes[1]); return 0; } byte writeByAdress(byte reg_adr, unsigned int value) { //I2C read 2-byte register byte bytes[2]; bytes[1] = value & 0xFF; bytes[0] = (value >> 8) & 0xFF; Wire.beginTransmission(I2C_DRV10983_Q1_ADR); Wire.write(reg_adr); Wire.write(bytes,2); return Wire.endTransmission(); } boolean flag = true; void loop() { if(flag){ unsigned int onReady = 0; writeByAdress(EECTRL_Reg, 0xFFFF); writeByAdress(EEPROM_Access_Code_Reg, 0x0000); //Reset EEPROM_Access_Code_Reg writeByAdress(EEPROM_Access_Code_Reg, 0xC0DE); //Set EEPROM_Access_Code_Reg while(onReady == 0){ // Wait EEPROM ready readByAdress(EEPROM_EeReady_Reg, onReady); } Serial.println("EEPROM_Access."); onReady = 0; //Write values on shadow registers //writeByAdress(EEPROM_Access_Reg, 0x1000); //Not use EEPROM storage. Store values in shadow registers writeByAdress(0x90, 0x154F); writeByAdress(0x91, 0x042C); writeByAdress(0x92, 0x0090); writeByAdress(0x93, 0x09EA); writeByAdress(0x94, 0x3FAF); writeByAdress(0x95, 0xFC33); writeByAdress(0x96, 0x016A); writeByAdress(EEPROM_Access_Reg,0x0006); //EEPROM mass access enabled && update while(onReady == 0 ){ // Wait EEPROM ready readByAdress(EEPROM_EeReady_Reg, onReady); } Serial.println("EEPROM_Update."); writeByAdress(EECTRL_Reg, 0x0000); //Run motor flag = false; } }
Kemudian, syal yang lebih rapi dipesan di Kerajaan Tengah:

Setelah pendaftaran (yah, ini yang mereka butuhkan) Anda dapat mengunduh file proyek secara gratis. Atau segera pesan papan di
sini .
Tentang "transplantasi jantung"
Satu-satunya yang tersisa adalah mengeluarkan motor dari penutup HDD, yang omong-omong, dalam 2,5 disk (dan sebagian besar 3,5) merupakan bagian integral darinya. Secara singkat, Anda dapat menggambarkan proses dengan frasa terkenal "
Saw, Syura, saw! ":
 Panduan eksternal untuk mahkota logam dengan pengikat ke kasing disk terbuat dari kayu lapis. Untuk keamanan, kabel motor dilekatkan ke alasnya sehingga tidak terputus oleh mahkotaSetelah pengeboran kami berkeliling dengan motor. Setelah pemrosesan file, kami memperoleh diameter dasar sekitar 25 mm.
Panduan eksternal untuk mahkota logam dengan pengikat ke kasing disk terbuat dari kayu lapis. Untuk keamanan, kabel motor dilekatkan ke alasnya sehingga tidak terputus oleh mahkotaSetelah pengeboran kami berkeliling dengan motor. Setelah pemrosesan file, kami memperoleh diameter dasar sekitar 25 mm.Persiapan penerima untuk transplantasi:
Otak dan jantung pompa masa depan rukun satu sama lain dan siap untuk menemukan habitat baru. Jadi sudah waktunya untuk memikirkan casing dan impeller.
Karena perlu untuk mendapatkan tekanan tinggi dengan volume kerja kecil, impeller dirancang dengan 7 sinar:
 Pencetakan 3D dengan polycarbonateModel 3D
Pencetakan 3D dengan polycarbonateModel 3DPolycarbonate adalah hal yang hebat untuk kasus ini. Tetapi mencetak seluruh bangunan itu mahal untuk mereka. Potongan lembaran tebal sangat sulit ditemukan dan penggilingan tidak gratis (bagi saya). Namun untuk terima kasih kepada pengiklan, Anda dapat meminta memo dari lembaran 4 mm dan 2 mm. Jadi case ini dirancang untuk pemotongan laser selanjutnya dari bagian-bagian dan menempelkannya ke dalam satu unit tanpa perlu milling. Hanya lubang pengeboran untuk alat kelengkapan dan mur yang diperlukan.
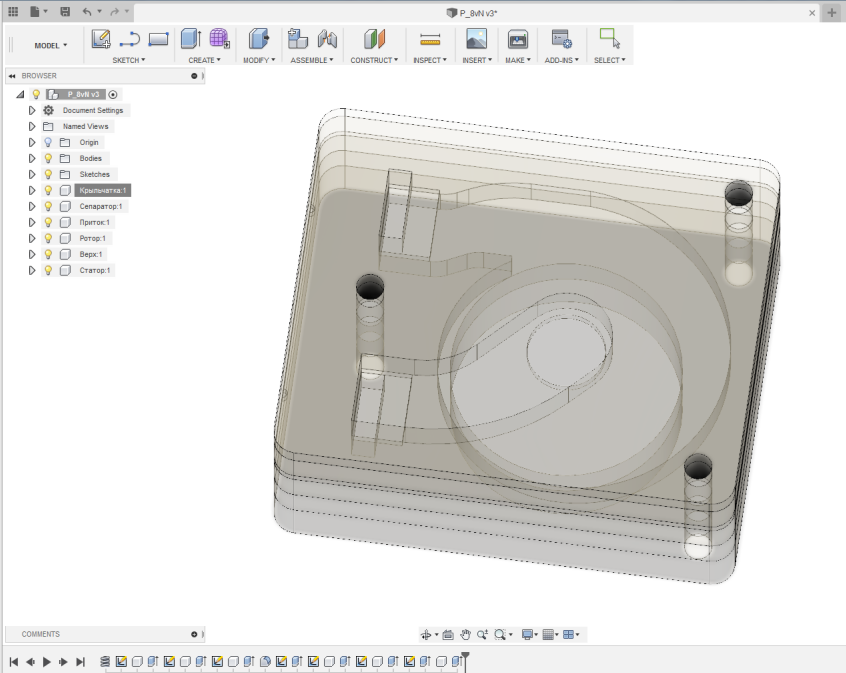 Tampilan model 3DModel 3D
Tampilan model 3DModel 3D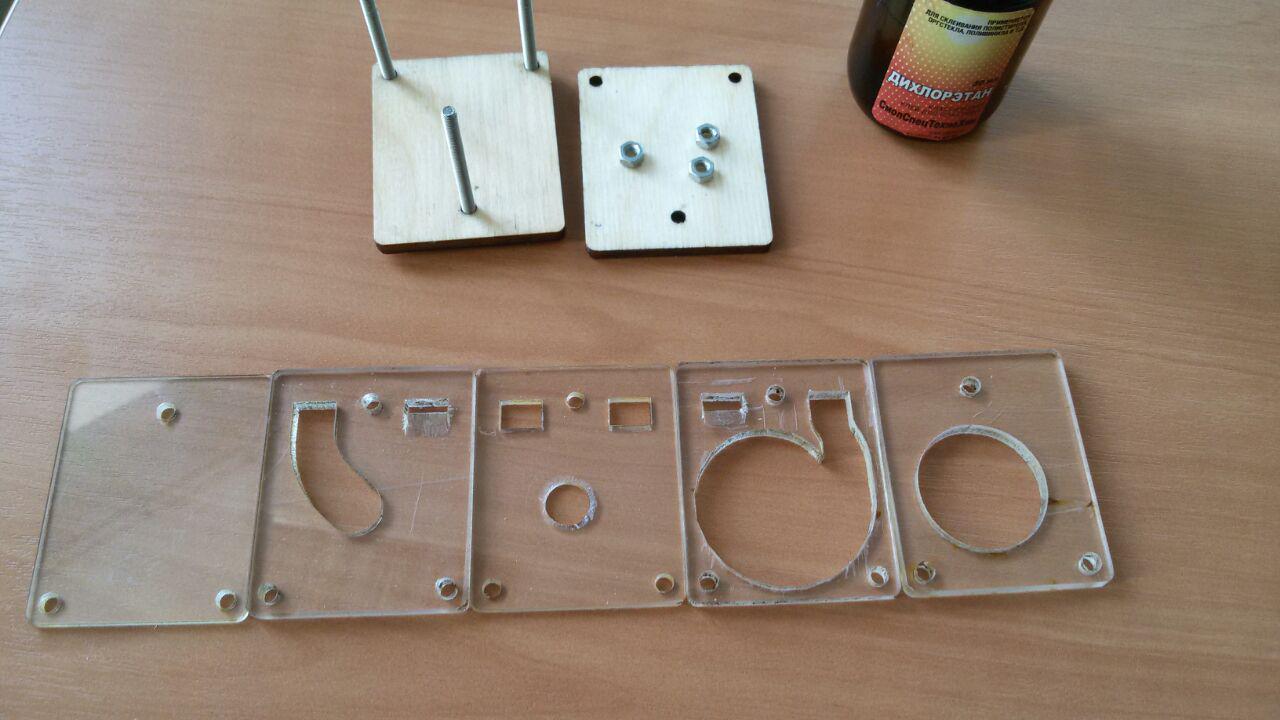 Satu set komponen untuk menempelkan "bagian atas" pompa. Di tempat-tempat di mana saluran inflow dan outflow terhubung, wajah terputus
Satu set komponen untuk menempelkan "bagian atas" pompa. Di tempat-tempat di mana saluran inflow dan outflow terhubung, wajah terputusKemajuan operasi:
Di sini saya ingin melakukan penyimpangan dan mengingatkan mereka yang ingin mengulang, dan tidak hanya bahwa dikloroetana, yang direkatkan bersama,
mengandung sedikit vitamin dan Anda perlu menghirup zat yang agak beracun dan mudah menguap. Bekerja dengannya harus dilakukan di luar atau di area yang berventilasi baik.
 Tumpukan bagian "atas" pada pengeringan setelah perekatan adalah rotor aliran atas pemisah-impeller-rotor. Demikian pula, dasar untuk motor direkatkan bersama-sama (atau seluruhnya terbuat dari sepotong polikarbonat 6mm)
Tumpukan bagian "atas" pada pengeringan setelah perekatan adalah rotor aliran atas pemisah-impeller-rotor. Demikian pula, dasar untuk motor direkatkan bersama-sama (atau seluruhnya terbuat dari sepotong polikarbonat 6mm) Setelah menempel, lubang untuk fitting dibor - tabung kuningan 8mm melalui takik pada bagian "pemisah"
Setelah menempel, lubang untuk fitting dibor - tabung kuningan 8mm melalui takik pada bagian "pemisah" Komposisi lama yang baik BF-4, seperti bagi saya, memberikan ikatan kuningan dan polikarbonat yang andal
Komposisi lama yang baik BF-4, seperti bagi saya, memberikan ikatan kuningan dan polikarbonat yang andal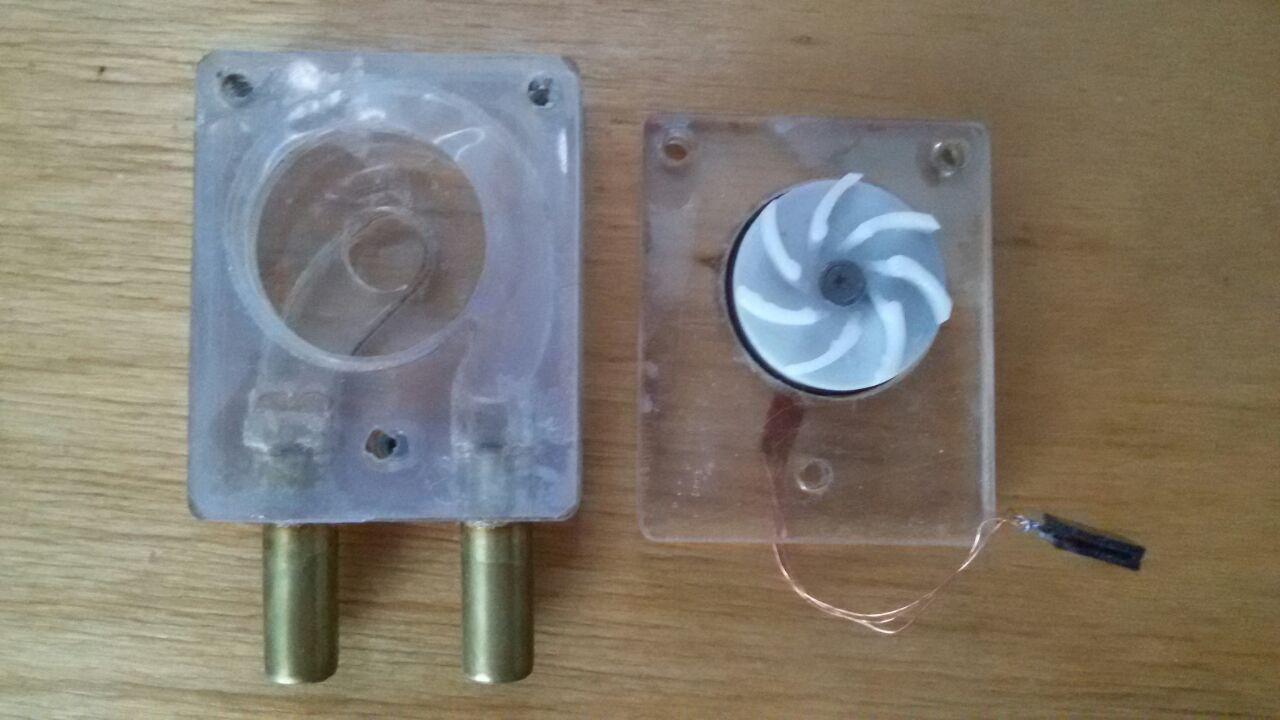 Basis motor di bagian bawah pompa direkatkan dengan lem yang sama. Di bagian atas, lubang ( tidak melalui dan melalui!) Dibor untuk menempelkan kacang keling M3. Dan foto menunjukkan gasket silikon tipis
Basis motor di bagian bawah pompa direkatkan dengan lem yang sama. Di bagian atas, lubang ( tidak melalui dan melalui!) Dibor untuk menempelkan kacang keling M3. Dan foto menunjukkan gasket silikon tipisPengujian:
Jadi sudah tiba saatnya untuk memeriksa pekerjaan buatan rumah. Untuk ini, bangku tes buru-buru dirakit. Karena pengembang serius membaca
anak -
anak Habr, yang penampilan dan komposisinya dapat menyebabkan kepanikan, kengerian, dan disorientasi, saya ingin menyembunyikannya di bawah spoiler ... tapi saya harap semuanya akan berhasil, dan kemudian jangan katakan bahwa saya tidak memperingatkan Anda, para pembaca yang budiman !
 Arduinka mengirimkan sinyal kontrol PWM, siklus tugas yang diatur secara manual oleh variabel resistor, membaca nilai register konfigurasi, dan juga menentukan kecepatan rotasi baik melalui register driver internal (RPMrg) dan sinyal FG (RPMfg). Daya Motor - 12vMulai motor tanpa beban. Kontrol kecepatan dan pengukuran energi
Arduinka mengirimkan sinyal kontrol PWM, siklus tugas yang diatur secara manual oleh variabel resistor, membaca nilai register konfigurasi, dan juga menentukan kecepatan rotasi baik melalui register driver internal (RPMrg) dan sinyal FG (RPMfg). Daya Motor - 12vMulai motor tanpa beban. Kontrol kecepatan dan pengukuran energiMotor mulai sukses dari 6% sinyal kontrol PWM. Dan pada akhir video Anda dapat melihat bagaimana pada kecepatan tinggi nilai-nilai kecepatan dalam register internal "hang" dalam interval dari revolusi 10rk ke 13rk, walaupun frekuensinya diperbaiki tanpa perubahan melalui output FG.
Pemalasan jelas - mereka mendapat revolusi 13k pada tegangan 12v dan konsumsi 0,16A. Tetapi pompa air sedang menyala, dan di sini saya mengejar udara. Jadi tahap selanjutnya adalah mengawal anggota rumah tangga ke jalan, agar tidak mengganggu, dan pekerjaan kamar mandi!
 Sayangnya, saya gagal melakukan pengukuran dan merekam video. Jadi mari kita bergaul dengan foto umum. Stopwatch dan kaleng 3L ditambahkan ke peralatan pengukur
Sayangnya, saya gagal melakukan pengukuran dan merekam video. Jadi mari kita bergaul dengan foto umum. Stopwatch dan kaleng 3L ditambahkan ke peralatan pengukur Menurut hasil pengukuran, kami mendapat meja seperti itu
Menurut hasil pengukuran, kami mendapat meja seperti itu Bagan arus
Bagan arusAkibatnya - kerajinan ini sepenuhnya memenuhi persyaratan saya. Dan jika terjadi kerusakan, berkat desain yang dapat dilipat dan keberadaan kotak dengan 2.5HDD mati di setiap bengkel / pusat layanan, tidak akan sulit untuk diperbaiki. Dan jalan menuju pembangunan lebih lanjut dari NWO terbuka! Jadi untuk dilanjutkan!