Dalam
artikel sebelumnya tentang desain berorientasi model , ditunjukkan bahwa tidak semua teknik sama-sama bermanfaat. Dan itu menjelaskan bagaimana melakukannya dengan benar, sehingga tidak akan menyakitkan luar biasa. Tetapi pada akhir artikel, pertanyaan diajukan, provokatif karena Sharon Stone ditanyai oleh penyelidik: desain berorientasi model memang baik, tetapi bagaimana membuktikan bahwa model tersebut cocok dengan objek? Apa buktinya?
Jawaban umum untuk pertanyaan ini masih sedang dipersiapkan, tetapi saya dapat memberi Anda contoh nyata dan segar tentang yang khusus sekarang. Ternyata di tangan saya di sini, seperti biasa tanpa sengaja, teks dari spesialis terkemuka di negara kita pada drive listrik Kalachev Yuri Nikolaevich, penulis buku
Modeling in a electric drive. Instruksi untuk memahami. bersama dengan izin baiknya untuk menerbitkan. Teks ini masih sedang dipersiapkan untuk publikasi dalam publikasi khusus, tetapi pembaca Habrir akan melihatnya terlebih dahulu.
Lebih jauh di bawah luka
Kalachev Yu. N., Lantsev V.Yu., Okulov E.V.Motor DC Brushless
(praktik penerapan pemodelan dan pembuatan kode di Aeroelectromash JSC)Hore, kawan !!! Itu terjadi !!!
Akhirnya, kami melihat buah dari tren progresif yang tumbuh di industri penggerak domestik.
Artikel ini membahas teknologi merancang drive listrik menggunakan simulasi dan pembuatan kode. (Desain berorientasi model yang benar )
Mengenai pemodelan, ini bukan masalah baru untuk driver kami. Tetapi beberapa orang telah mencoba pembuatan kode otomatis dari program pengontrol drive dari modelnya, dan pada skala global ....
Kami berani menyatakan bahwa tren yang bermanfaat ini (penulisan otomatis suatu program oleh program lain) akan aktif berkembang di dunia digital masa depan .... Orang yang memulai lebih awal akan menang.
Kami ingin membuat reservasi bahwa pembuatan kode, menurut kami, tidak membatalkan dan tidak mengganti programmer, tetapi hanya membantunya. Dalam hal ini, tentu saja, kami percaya bahwa kode SI dari program yang dihasilkan harus terbuka untuknya.
Jadi kami lakukan, hasil pembuatan kode otomatis adalah kode C, terbuka untuk dilihat dan dianalisis.
Dalam kasus kami, objek kontrol adalah penggerak listrik tertentu dengan motor DC brushless (BDT), poros yang terhubung ke gearbox yang mengubah rotasi menjadi gerakan translasi batang.
Tugas drive listrik cukup standar - untuk memposisikan poros batang, lebih disukai lebih cepat dan lebih tepat ... Seringkali drive ini digunakan untuk mengontrol kemudi kendaraan udara tak berawak.
Unit kontrol perangkat dirancang dan diproduksi di departemen penggerak listrik Aeroelectromash JSC berdasarkan mikrokontroler 1986 1 (PKK Milander JSC). Itu perlu untuk membuat algoritma dan program kontrol pengontrol untuk tujuan penggunaan lebih lanjut dalam masalah praktis.
Pekerjaan itu dilakukan bersama oleh spesialis perusahaan layanan 3V dan karyawan departemen penggerak listrik Aeroelectromash JSC.
Tugas pertama yang dihadapi tim kami adalah mengidentifikasi objek kontrol. Untuk ini, beberapa pengukuran karakteristik mesin dilakukan, yang ternyata cukup spesifik.
Sebagai contoh, motor yang diukur EMF memiliki bentuk yang sangat aneh, ditunjukkan pada Gambar 1. <br?

Gambar 1. Motor yang diukur EMF.
Jika pembaca terbiasa dengan program Simulink, maka dia tahu bahwa di sana, dalam model motor dengan konstanta dan magnet, ada pilihan EMF sinusoidal atau trapesium.
Nah, dan ke mana harus pergi ke petani miskin? Di mana sinus di sini, dan di mana trapesium? (Alat pemodelan yang tepat harus terbuka!). Dalam lingkungan SimInTech, bahkan ketidaksempurnaan mesin seperti itu dapat diperhitungkan. Kami telah mengatur formulir EMF yang ditunjukkan pada Gambar. 2

Gambar 2. Engine EMF dibuat di SimInTech
Temukan dua perbedaan pada Gambar. 1 dan Gambar. 2. Kami menemukan satu hal - warna.
Fitur mesin selanjutnya adalah momen gigi yang signifikan, karena geometri sirkuit magnetik stator dan tidak adanya lekukan pada alur magnet rotor. Momen diukur secara eksperimental dan dimasukkan ke dalam model. Grafik momen gigi ditunjukkan pada Gambar. 3.

Gambar 3. Prong moment.
Selain itu, kerugian magnetisasi diperhitungkan dalam model mesin, yang tidak ada dalam model matematika dari pengembang lain dari program simulasi.
Lebih jauh, pengoperasian drive listrik dibandingkan dengan hasil simulasi dalam mode uji. Di bawah ini pada Gambar. Gambar 4 dan 5 menunjukkan hasil tes siaga (frekuensi maksimum tanpa beban).

Gambar 4. Pemalasan. Mesin nyata.

Gambar 5. Fase idle saat ini. Hasil simulasi.
Kesimpulan:
Osilogel pemalasan nyata dan model bertepatan. Secara visual, perbedaannya tidak terlihat.
Setelah tes siaga berhasil, uji dampak dinamis dilakukan pada mesin dengan gearbox terpasang. Dalam percobaan ini, tegangan konstan diterapkan ke gulungan motor dengan mundur pada frekuensi 30 Hz. Dalam hal ini, tautan keluaran terombang-ambing dengan frekuensi yang sama. Gambar 6 menunjukkan hasil percobaan ini:
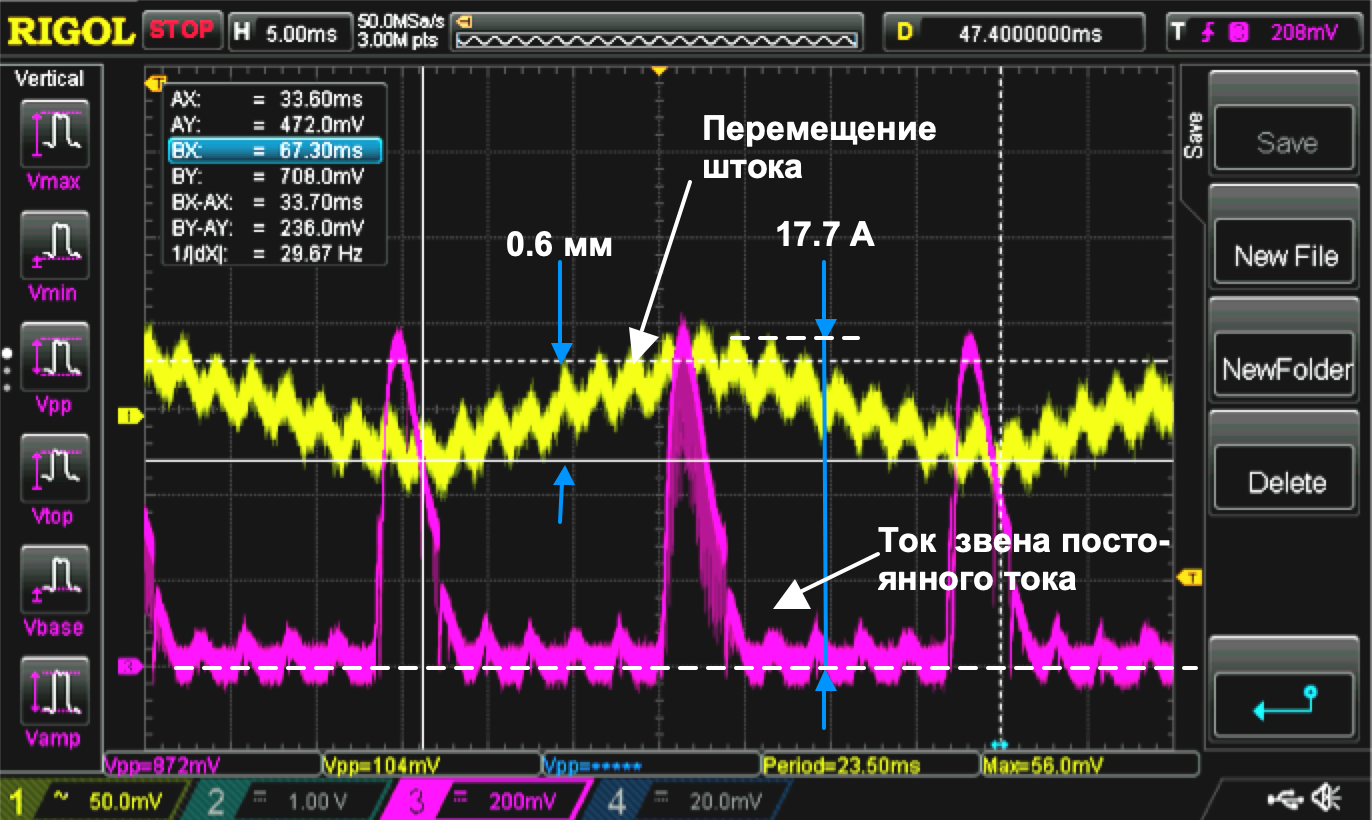
Gambar 6. Mesin nyata di bawah beban
(Sinyal ditembak dengan gangguan. Jitter dan blur frekuensi tinggi adalah gangguan pada sinyal posisi dan sensor saat ini).
Data yang diperoleh dibandingkan dengan model drive yang beroperasi dalam mode serupa (Gbr. 7).

Gambar 7. Model di bawah beban
Kesimpulan:
- Pergerakan batang pada kenyataannya dan pada model benar-benar bertepatan
- Nilai puncak arus motor nyata dan model bertepatan dengan akurasi kesalahan pengukuran.
Jenis model terverifikasi dari daya dan bagian mekanis dari penggerak listrik yang dibangun di atas elemen pustaka standar dari program SimInTech ditunjukkan pada Gambar. 8.
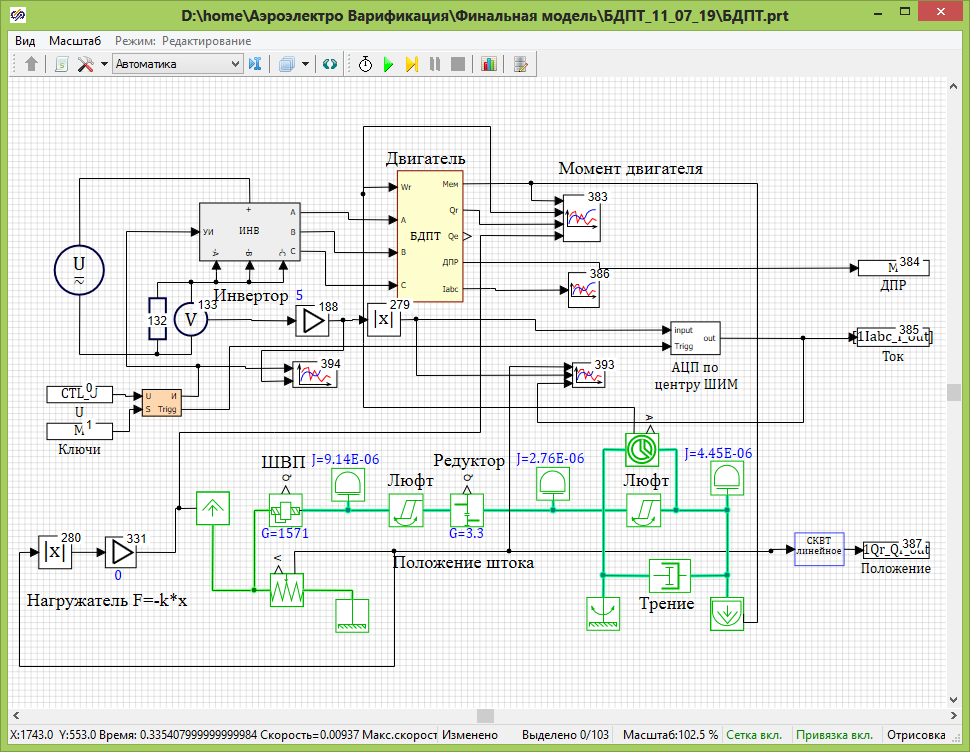 Gambar 8. Skema model rumit penggerak listrik, termasuk bagian mekanis.
Gambar 8. Skema model rumit penggerak listrik, termasuk bagian mekanis.Ini terdiri dari model:
- power inverter
- motor dengan sensor posisi rotor (DPR)
- transmisi mekanis
- sensor saat ini
- pemuat
Setelah memastikan bahwa perilaku model cocok dengan perilaku produk nyata, sesuai dengan hasil simulasi, Anda dapat memilih struktur yang diperlukan dari sistem kontrol (CS) dan mengkonfigurasinya untuk berbagai jenis input yang tercantum dalam tugas teknis.
Dalam kasus kami, hasil yang baik ditunjukkan oleh sistem kontrol posisi sirkuit ganda dengan peredam kecepatan. Tampilan model struktur ini ditunjukkan pada Gambar. 9.
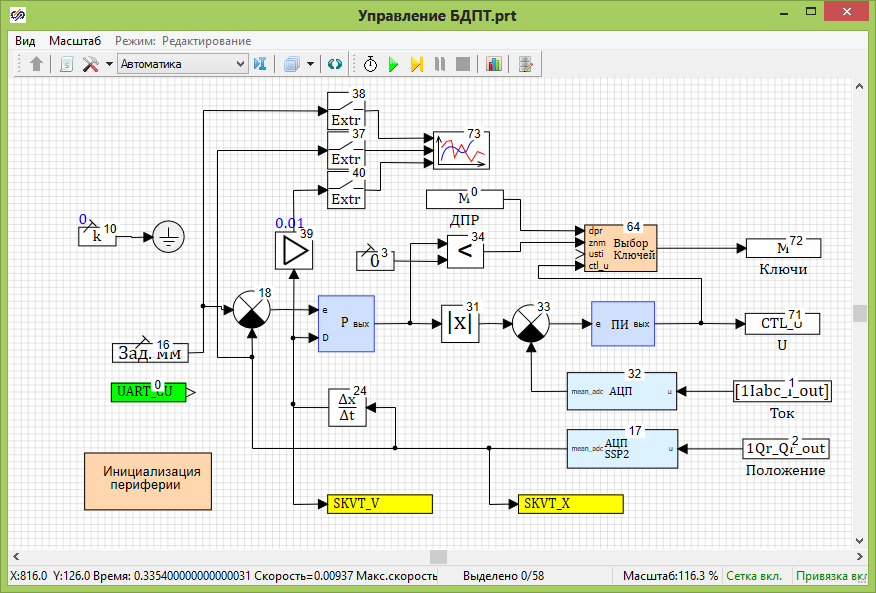
Gambar 9. Skema desain program kontrol drive.
Dengan penggunaan lebih lanjut dari pembuatan kode, tidak perlu pengkodean manual dari algoritma sistem kontrol - proyek yang selesai dalam lingkungan pengembangan Keil uVision dibuat secara otomatis. Setelah merakit gambar biner dari program, ini dapat diterjemahkan ke dalam prosesor kami (1986BE1T).
Perhatikan bahwa "Pilihan Kunci", "Inisialisasi Periferal", "ADC", "SSP2 ADC" blok model dalam mode simulasi menerapkan model matematika yang sesuai, dan selama pembuatan kode, mereka diganti dengan perpustakaan untuk bekerja dengan periferal prosesor yang digunakan.
Setelah memilih struktur sistem kontrol dan pengaturannya, kami harus:
- melakukan pembuatan kode program secara otomatis
- tulis program yang diterima ke controller
- menangkap hasil yang bagus
Menurut Gbr. 10, Anda dapat membandingkan pengoperasian model dan drive sebenarnya. Sebagai referensi posisi, digunakan sinusoid dengan frekuensi 3 Hz dan amplitudo 3 mm.
Untuk mendapatkan data dari pengontrol, disediakan bagian khusus dalam programnya yang menyediakan pembacaan sinyal internal melalui antarmuka serial. Pengguna, ketika drive sedang berjalan, melihat hasil firmware di jendela SimInTech.

Gambar 10. Perbandingan model dan drive nyata.
Yah, bahkan warnanya sama di sini ....
Hore, kawan !!! Itu terjadi !!!
Setiap orang yang tertarik dengan topik drive listrik merekomendasikan untuk mengunduh buku gratis
Kalachev Yu.N. Pemodelan dalam drive listrik.