Posting dalam seri:
8. Kami mengontrol dari ponsel-ROS Control, GPS-node7. Lokalisasi robot: gmapping, AMCL, titik referensi pada peta kamar6. Odometri dengan enkoder roda, peta ruang, lidar5. Kami bekerja di rviz dan gazebo: xacro, sensor baru.4. Buat simulasi robot menggunakan editor rviz dan gazebo.3. Mempercepat, mengganti kamera, memperbaiki gaya berjalan2. Perangkat Lunak1. BesiMulai mempelajari ROS (sistem operasi Robotic), Anda pertama kali kagum pada bagaimana "semuanya rumit", dari jumlah informasi tentang topik, simpul, tindakan, kepala Anda berputar. Dan, keinginan pertama adalah kembali mengelola robot ke skrip lama yang baik. Tapi tidak. Setiap pria dewasa harus mengumpulkan sesuatu yang lebih sedikit untuk pria yang akan mengemudi, berkedip, mencicit. ROS dipilih sebagai platform, karena masih merupakan langkah berikutnya dalam pengembangan robot di dunia arduino tanpa jiwa. Diusulkan untuk merakit "kereta" ROS, yang tidak hanya murah, tetapi juga fungsional: dapat naik garis di lantai, dengan kucing Anda, dengan tubuh Anda :) Langkah-langkah pertama adalah:
Beberapa lirik lagi
Hal kedua yang mencolok ketika mempelajari ROS adalah biaya platform di pasar. Satu set burger turtlebot (
sebagai salah satu yang terjangkau ) - $ 549 (34.500 p.). Segala sesuatu yang lain bahkan lebih mahal. Di sini dapat diperdebatkan bahwa bagian terbesar dari harga adalah lidar, alat untuk menentukan posisi robot di ruang angkasa. Yang dengan sendirinya berada di bawah 15k hal. Namun, semua komponen lain juga tidak murah.
Mari kita hitung berapa "gerobak" kita akan dikenakan biaya:
Total: 8000 p.
Harganya juga tinggi, tetapi urutan besarnya lebih murah daripada turtlebot. Jika diinginkan, mobil dapat dicetak pada printer 3d atau mengambil sepotong kayu lapis. Maka tinggal mengambil motor DC saja. Baterai untuk raspberry juga dapat diganti dengan analog yang lebih murah, yang utama adalah bahwa ia memberikan 5V 3A.
Kami mengumpulkanProyek ini didasarkan pada proyek yang sudah ada sebelumnya -
www.rosbots.com/build_it , tetapi dengan modifikasi yang signifikan. Selain itu, proyek dasar, dilihat dari informasi dari situs, ditinggalkan, jadi Anda harus memikirkan semuanya sendiri.
Awal perakitan dan pemasangan motor mirip dengan instruksi di atas:
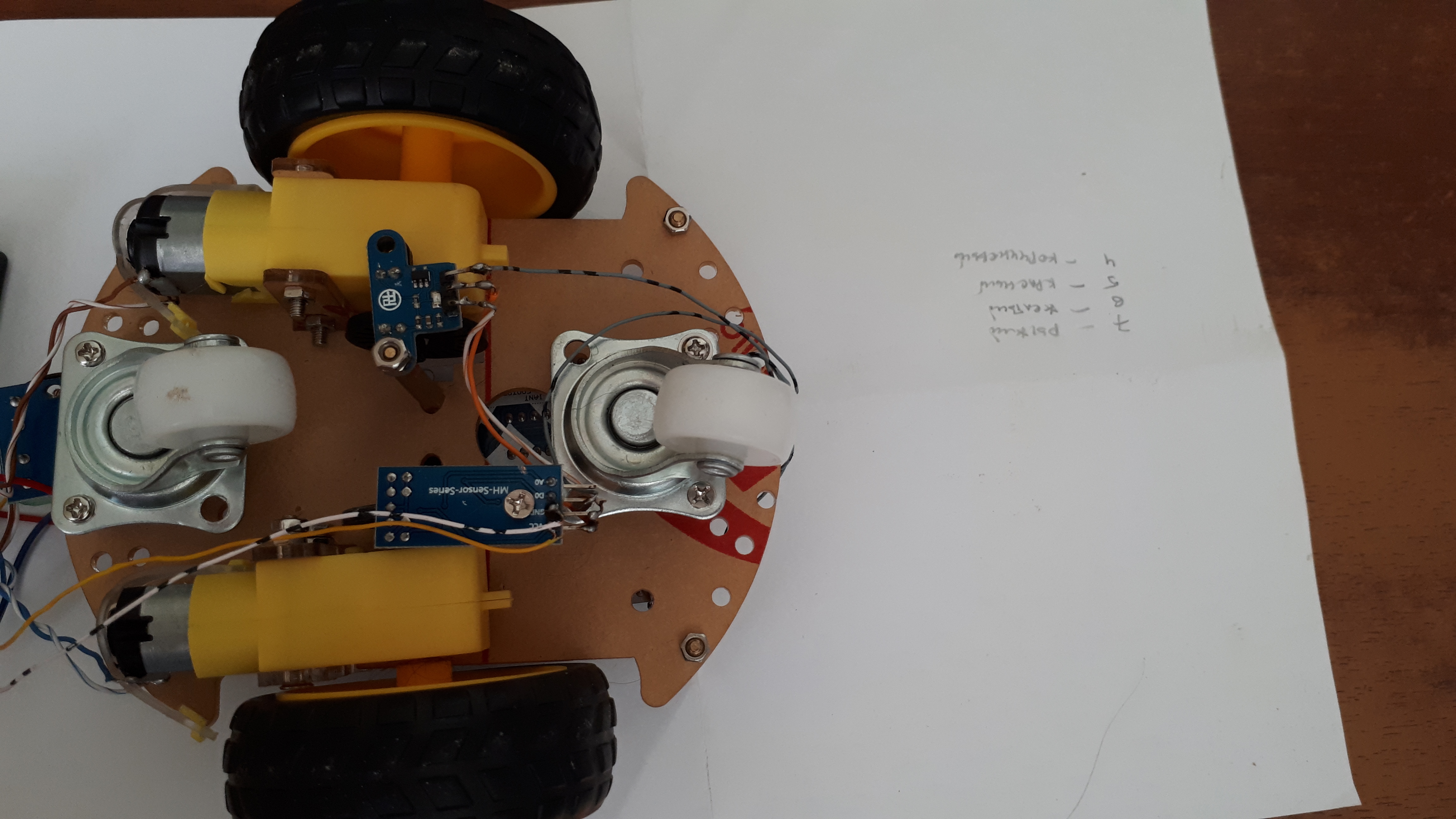
Di sini Anda perlu memperhatikan encoders, yang dipasang sedemikian rupa sehingga mereka "menutupi" cakram dengan slot, mengenakan motor:
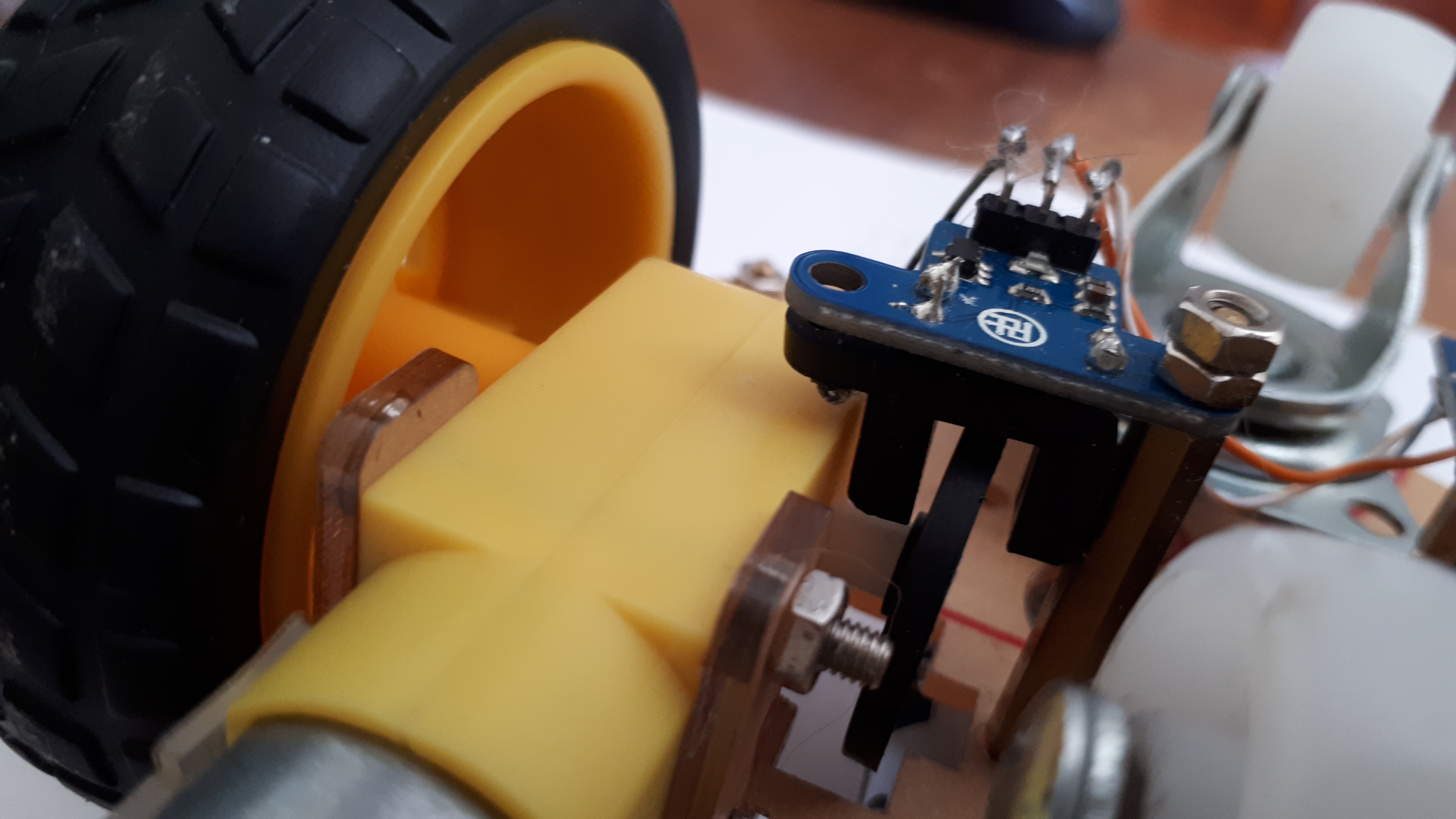
* Secara umum, encoders tidak kuat berguna dan Anda tidak dapat me-mount mereka. Encoder optik memungkinkan Anda untuk menentukan jarak yang ditempuh, tetapi sayangnya, mereka tidak memungkinkan Anda untuk menentukan arah pergerakan.
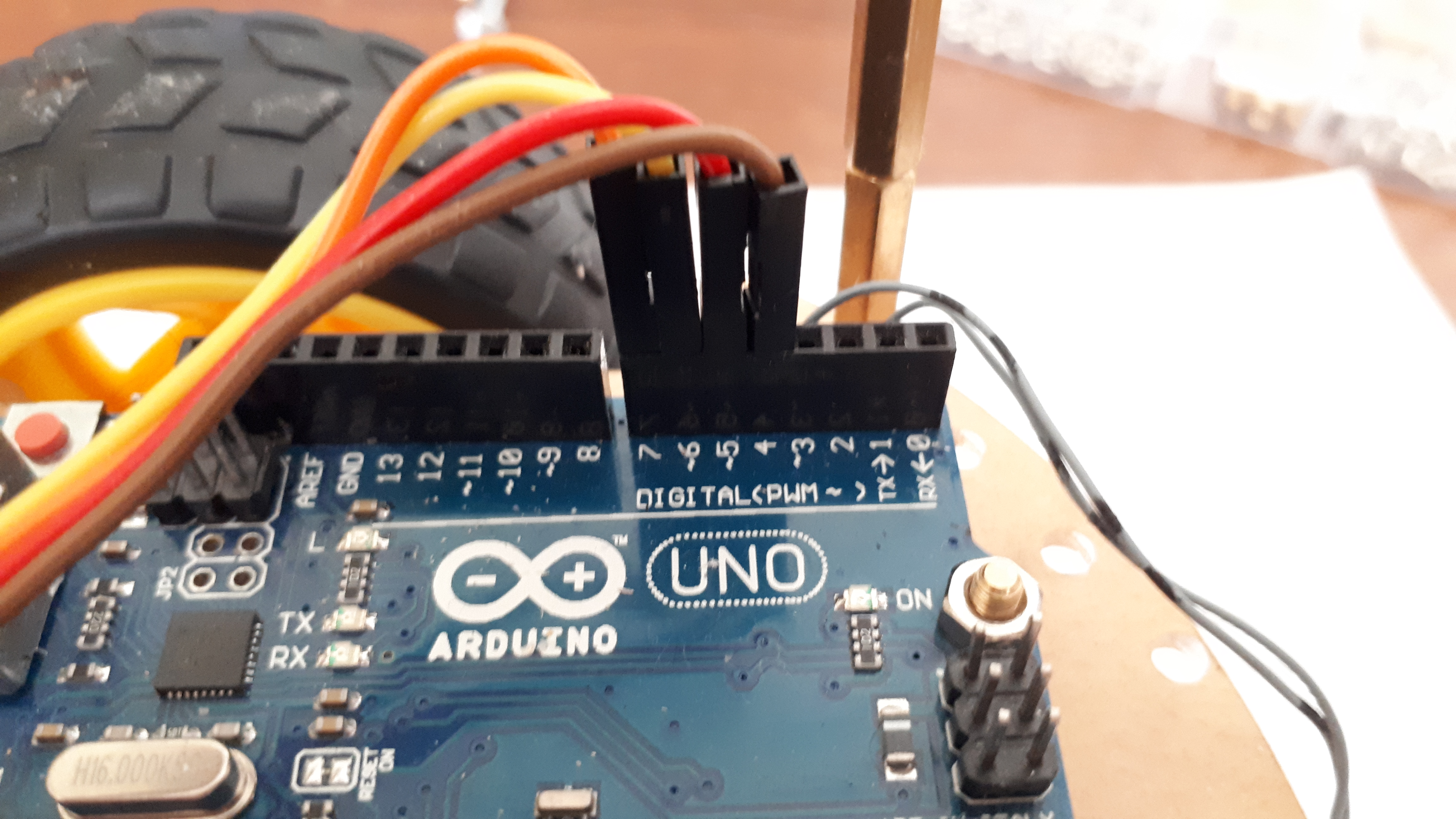
Setelah memasang motor dan encoders (opsional), kami menghubungkan kabel dengan uno arduino, driver motor, kompartemen baterai 2 18650 baterai. Diagram koneksi mirip dengan yang diposting di situs web proyek dasar dengan satu pengecualian:

5V untuk enkoder dapat diambil dengan arduino (VCC dari sensor kecepatan kanan dan sensor kecepatan kiri pada arduino 5V).
Kami memperbaiki arduino dan driver mesin, daya untuk driver:

Mie lebih dekat:
Pengemudi mesin. Terminal hijau berisi pasangan kabel dari motor:

Arduino tidak akan didukung oleh baterai, itu akan terhubung lebih lanjut melalui usb ke raspberry.
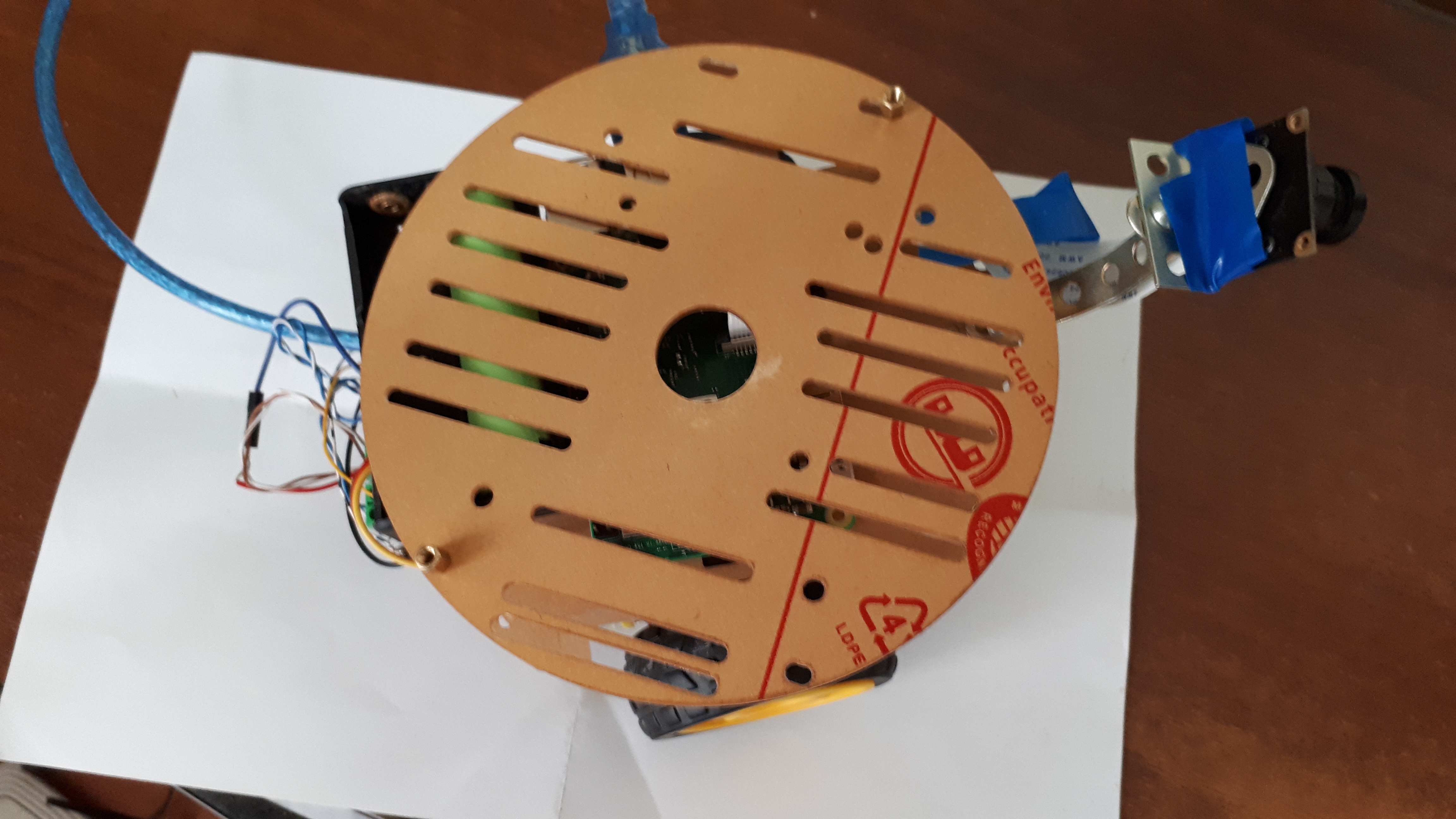
Kami menempatkan lapisan kedua mesin
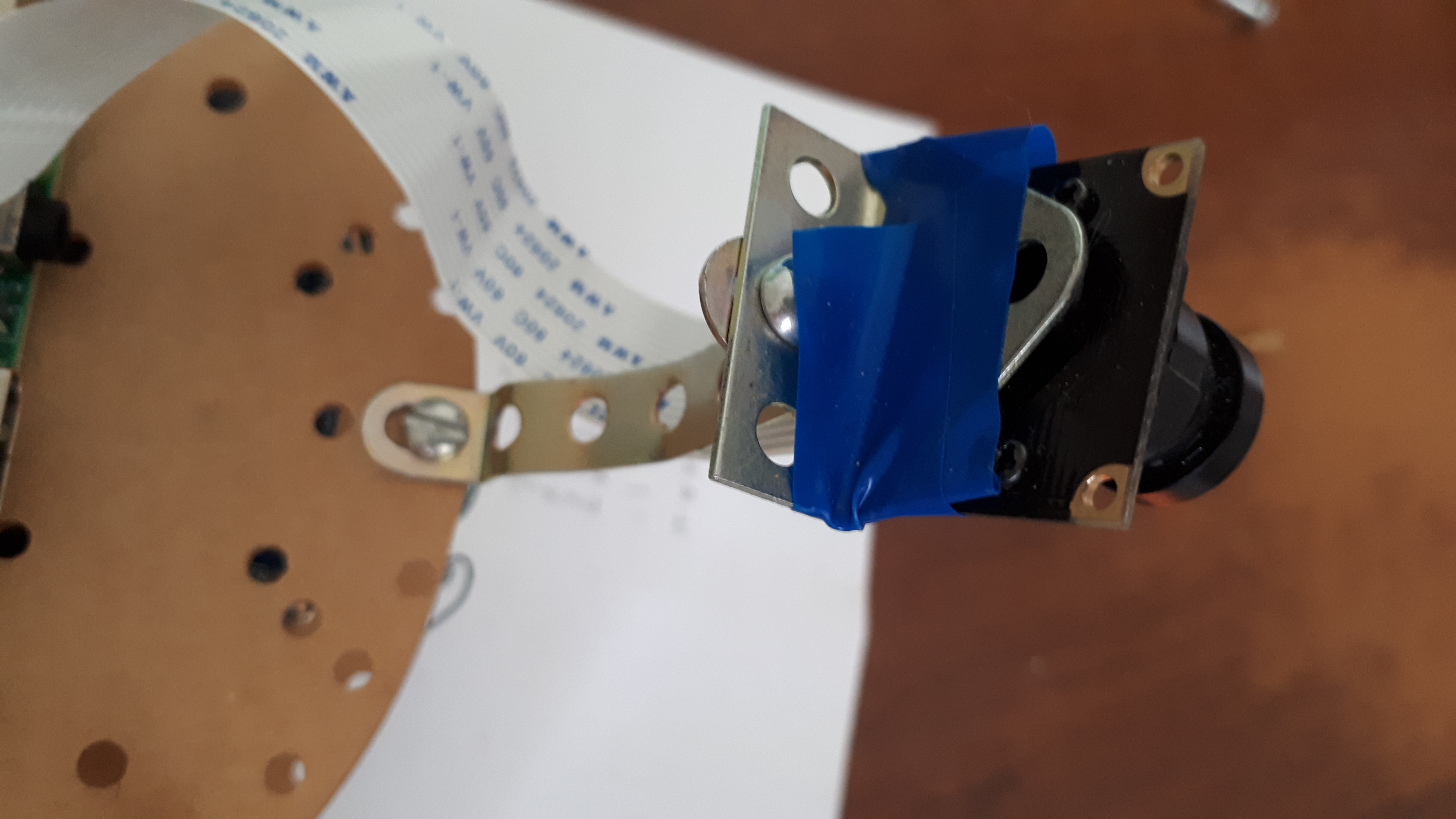
Di sini akan terletak kompartemen baterai, raspberry pi, kamera pada detail dari desainer Soviet:
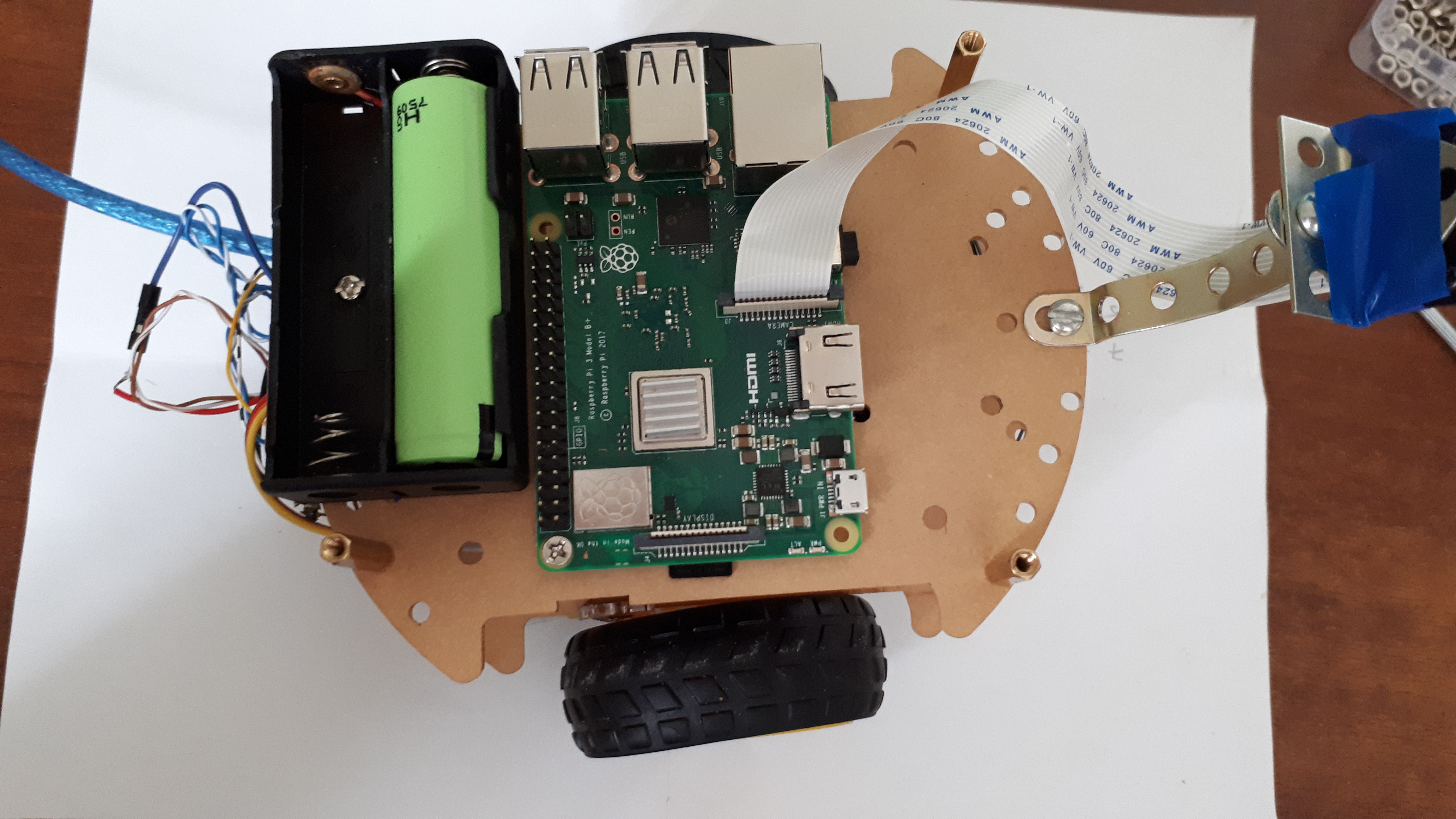
Jangan lupa mencolokkan kabel dari kamera ke raspberry:

Desainer Soviet di:
 Tutup burger, lapisan ketiga "kereta"
Tutup burger, lapisan ketiga "kereta" .
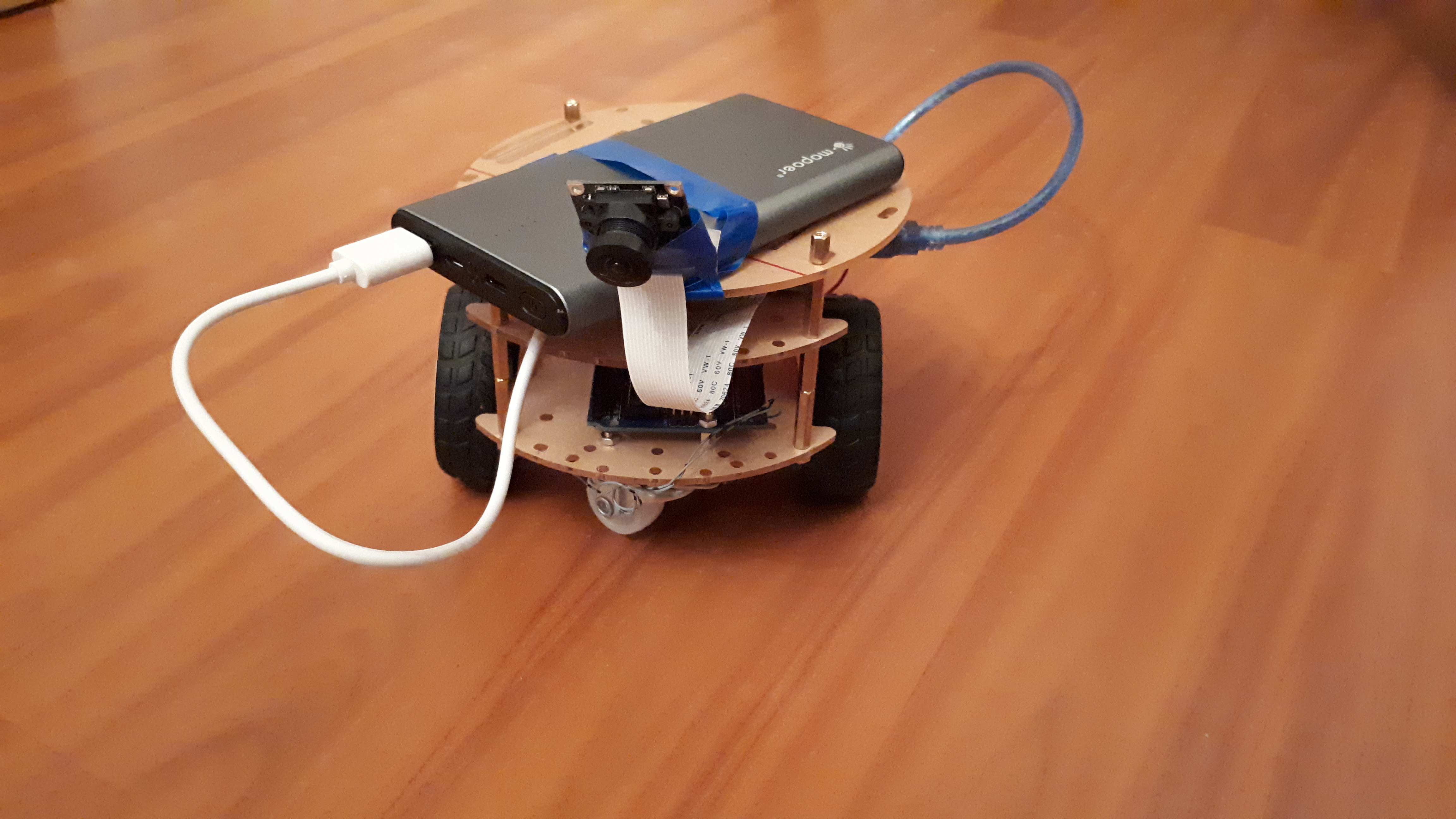
Di sini akan menggerakkan POWERBANK untuk raspberry:

* Sedikit tentang POWERBANK untuk menggerakkan raspberry pi:
:
Semuanya, mobil sudah siap!
Dalam posting berikut ini kita akan berbicara langsung tentang ROS, garis, tubuh, kucing, dan senyum.
Selamat datang tip dan kritik tanpa ampun!
* Diagram pengkabelan diperbarui.