 Catatan 16 Juli 2019 Elon Musk mempresentasikan teknologi, yang merupakan salah satu upaya serius pertama untuk memperkenalkan neurointerfaces dalam praktik klinis dan memiliki tujuan transhuman nyata dalam jangka panjang. Artikel ini adalah terjemahan, dengan beberapa catatan, dari artikel asli yang menggambarkan teknologi antarmuka neurokomputer, tautan yang juga diposting di situs web perusahaan pengembang Neuralink . Artikel ini menjelaskan fitur dan karakteristik modul utama yang mendasari teknologi ini, termasuk: microelectrodes fleksibel biokompatibel, manipulator bedah saraf robotik untuk memasukkan elektroda ke otak, serta mikroelektronika khusus yang menyediakan penerimaan, amplifikasi, dan digitalisasi sinyal dari aktivitas saraf.
Catatan 16 Juli 2019 Elon Musk mempresentasikan teknologi, yang merupakan salah satu upaya serius pertama untuk memperkenalkan neurointerfaces dalam praktik klinis dan memiliki tujuan transhuman nyata dalam jangka panjang. Artikel ini adalah terjemahan, dengan beberapa catatan, dari artikel asli yang menggambarkan teknologi antarmuka neurokomputer, tautan yang juga diposting di situs web perusahaan pengembang Neuralink . Artikel ini menjelaskan fitur dan karakteristik modul utama yang mendasari teknologi ini, termasuk: microelectrodes fleksibel biokompatibel, manipulator bedah saraf robotik untuk memasukkan elektroda ke otak, serta mikroelektronika khusus yang menyediakan penerimaan, amplifikasi, dan digitalisasi sinyal dari aktivitas saraf.Anotasi
Antarmuka neuro-komputer (BMI - inteface mesin otak) memberikan peluang untuk mengembalikan fungsi sensorik dan motorik, serta pengobatan gangguan neurologis, tetapi hingga saat ini BMI belum menerima distribusi klinis yang luas, sebagian karena kurangnya jumlah saluran yang membatasi potensi mereka. Dalam buku putih ini, kami menjelaskan langkah pertama Neuralink menuju sistem broadband BMI yang dapat diskalakan. Kami menciptakan array "benang" kecil dan fleksibel - elektroda, di mana hingga 3072 elektroda didistribusikan di lebih dari 96 benang. Kami juga menciptakan robot bedah saraf yang mampu menanamkan enam untai (192 elektroda) per menit. Setiap benang dapat dimasukkan secara individual ke otak dengan akurasi mikron untuk menghindari kerusakan pada jaringan pembuluh darah superfisial dan mencapai tujuan di area otak yang ditentukan dengan tepat. Array elektroda dikemas dalam perangkat implan kecil yang berisi sirkuit mikro khusus untuk amplifikasi built-in daya rendah dan digitalisasi sinyal: paket untuk 3072 saluran memiliki dimensi 23 × 18,5 × 2 mm dan volume 0,851 cm3. Satu kabel USB-C memungkinkan streaming data dari perangkat dengan bandwidth penuh dan perekaman simultan dari semua saluran. Hingga 85,5% dari elektroda implan mencatat langsung puncak aktivitas neuron. Pendekatan Neuralink terhadap BMI memiliki kepadatan dan skalabilitas elektroda yang belum pernah terjadi sebelumnya, memungkinkan penggunaan klinis dalam perakitan.
1. Pendahuluan
Brain-Machine Interface (BMI) dapat membantu orang dengan berbagai gangguan klinis. Sebagai contoh, peneliti telah menunjukkan kemampuan untuk mengontrol menggunakan kursor komputer prosthetics neuro [1, 2, 3], anggota badan robot [4, 5] dan synthesizer ucapan [6] menggunakan, dalam semua contoh ini, tidak lebih dari 256 elektroda. Sementara kemajuan ini menunjukkan bahwa transfer informasi presisi tinggi antara otak dan mesin adalah mungkin, pengembangan BMI sangat dibatasi oleh ketidakmampuan untuk merekam sinyal dari sejumlah besar neuron. Pendekatan non-invasif dapat merekam rata-rata jutaan neuron melalui tengkorak, tetapi sinyal ini terdistorsi dan tidak spesifik [7, 8]. Elektroda invasif yang terletak di permukaan korteks dapat merekam sinyal yang berguna, tetapi mereka terbatas karena rata-rata aktivitas ribuan neuron dan tidak dapat merekam sinyal jauh di dalam otak [9]. Sebagian besar BMI menggunakan metode invasif karena pembacaan yang paling akurat dari representasi saraf membutuhkan pencatatan potensi aksi neuron tunggal dalam ansambel yang terkait secara fungsional [10].
Mikroelektroda adalah standar emas teknologi untuk merekam potensi aksi, tetapi sejauh ini belum ada teknologi mikroelektroda yang dikembangkan secara klinis yang dapat ditingkatkan untuk merekam aktivitas sejumlah besar neuron [11]. Ini akan membutuhkan sistem yang dibuat dari bahan dengan sifat khusus yang memberikan biokompatibilitas tinggi, keamanan dan daya tahan. Selain itu, perangkat ini juga akan memerlukan pendekatan bedah praktis dan peralatan elektronik berdaya rendah dan berdensitas tinggi untuk akhirnya memberikan kinerja implan nirkabel sepenuhnya.
Sebagian besar perangkat untuk perekaman saraf jangka panjang adalah array elektroda yang terbuat dari logam keras atau semikonduktor [12, 13, 14, 15, 16, 17, 18]. Sementara kisi-kisi logam yang kaku memfasilitasi penetrasi ke dalam otak, ukuran, modulus Young, ketidakcocokan dalam menekuk kekakuan antara probe kaku dan jaringan otak dapat merangsang respons kekebalan yang membatasi fungsi dan daya tahan perangkat ini [19, 11]. Selain itu, geometri tetap array ini membatasi populasi neuron yang dapat diakses, terutama karena adanya pembuluh darah.
Pendekatan alternatif adalah dengan menggunakan probe polimer multi-elektroda tipis fleksibel [20, 21]. Ukuran yang lebih kecil dan peningkatan fleksibilitas probe ini harus menyediakan biokompatibilitas yang lebih besar. Namun, kelemahan dari pendekatan ini adalah bahwa probe polimer tipis tidak cukup kaku untuk langsung dimasukkan ke dalam otak; pengantar mereka harus dilengkapi dengan pengaku [22, 21], injeksi [23, 24] atau pendekatan lain [25], dan semuanya agak lambat [26, 27]. Untuk memenuhi persyaratan fungsional untuk NQI throughput tinggi, dengan mengambil keuntungan dari perangkat film tipis, kami telah mengembangkan pendekatan robotik di mana sejumlah besar probe polimer tipis dan fleksibel secara efektif dan independen dimasukkan ke berbagai wilayah otak [28].
Di sini kami melaporkan kemajuan Neuralink dalam menciptakan BMI yang fleksibel dan dapat diukur, yang meningkatkan jumlah saluran dengan urutan besarnya dibandingkan dengan pekerjaan sebelumnya. Sistem kami terdiri dari tiga komponen utama: probe polimer ultrathin (bagian 2 dari laporan ini), robot bedah saraf (bagian 3) dan elektronik khusus kepadatan tinggi (bagian 4). Kami mendemonstrasikan teknologi yang memungkinkan implantasi cepat 96 filamen polimer, yang masing-masing berisi 32 elektroda, dengan total 3072 elektroda.
Kami telah mengembangkan miniatur elektronik khusus, yang memungkinkan kami untuk secara bersamaan mentransmisikan semua data elektrofisiologi broadband dari semua elektroda ini (bagian 5). Kami mengemas sistem ini sedemikian rupa untuk memungkinkan implantasi jangka panjang dan mengembangkan perangkat lunak khusus untuk deteksi online aktivitas puncak neuron, yang dapat mendeteksi potensi aksi latensi rendah. Bersama-sama, sistem ini berfungsi sebagai platform penelitian modern dan prototipe pertama dari antarmuka neurokomputer manusia yang sepenuhnya dapat ditanamkan.
2. Utas
 Gambar 1
Gambar 1 : Probe polimer baru kami (utas). A. Probe Linear Edge, dengan 32 kontak elektroda berjarak 50 mikron terpisah. B. Probe "seperti pohon" dengan 32 kontak elektroda berjarak 75 mikron terpisah. C. Gambar yang lebih besar dari masing-masing elektroda untuk struktur A, menekankan area permukaan geometris kecil mereka. D. Distribusi impedansi elektroda (diukur pada 1 kHz) untuk dua perlakuan permukaan: PEDOT (n = 257) dan IrOx (n = 588).
Kami telah mengembangkan proses individu untuk pembuatan probe saraf dengan jarak minimum antara elektroda, yang menggunakan berbagai bahan film tipis biokompatibel. Substrat dan dielektrik utama yang digunakan dalam penyelidikan ini adalah polimida, yang mencakup film emas tipis. Setiap matriks film tipis terdiri dari daerah "filamen", yang memiliki kontak, trek elektroda, dan daerah "sensor", di mana film tipis terhubung ke mikrosirkuit non-standar yang menyediakan penguatan sinyal dan penerimaan. Proses produksi mikro di tingkat wafer memastikan produktivitasnya yang tinggi. Setiap pelat dilapisi dengan sepuluh perangkat film tipis yang menerima sinyal dari total 3072 kontak elektroda.
48 atau 96 utas terhubung ke setiap larik, yang masing-masingnya berisi 32 elektroda independen. Sirkuit terintegrasi terhubung ke kontak di area sensor film tipis menggunakan proses ikatan flip-chip (catatan: https: //en.wikipedia.org/wiki/Flip_chip).
Salah satu tujuan dari pendekatan ini adalah untuk mencapai area penampang sekecil mungkin dari benang untuk meminimalkan perpindahan jaringan di otak. Untuk mencapai hal ini, sambil mempertahankan jumlah saluran yang tinggi, litografi proyeksi langkah demi langkah dan metode pemrosesan mikro lainnya digunakan untuk memperoleh film logam dengan resolusi submikron.
Kami telah merancang dan memproduksi lebih dari 20 jenis filamen dan elektroda untuk array kami; dua contoh konstruksi ditunjukkan pada panel A dan B dalam gambar. 1. Kami membuat filamen dengan lebar 5 hingga 50 mikron, yang mencakup lokasi perekaman beberapa geometri (Gbr. 1). Ketebalan benang adalah dari 4 hingga 6 mikron, yang mencakup hingga tiga lapisan isolasi dan dua lapisan konduktor. Panjang benang tipikal adalah sekitar 20 mm. Sebelum penyisipan, parylene-C diaplikasikan pada benang untuk membentuk film di mana benang tetap melekat sampai robot bedah menghapusnya. Setiap benang berakhir dengan loop (16 × 50) μm2 untuk mengakomodasi threading jarum.
Karena setiap bagian dari elektroda emas memiliki area permukaan geometrik kecil (Gbr. 1C), kami menggunakan modifikasi permukaan untuk mengurangi impedansi untuk elektrofisiologi dan meningkatkan daya dukung permukaan yang efektif (Gbr. 1D). Dua dari perawatan ini yang kami gunakan adalah polimer konduktif elektrik polyethylenedioxythiophene yang diolah dengan polystyrene sulfonate (PEDOT: PSS) [29, 30] dan iridium oxide (IrOx) [31, 32]. Dalam pengujian benchtop, kami mencapai impedansi 36,97 ± 4,68 kOhm (n = 257 elektroda) dan 56,46 ± 7,10 kOhm (n = 588) untuk PEDOT: PSS dan IrOx. Impedansi rendah dari PEDOT: PSS menjanjikan, tetapi stabilitas jangka panjang dan biokompatibilitas PEDOT: PSS kurang dapat diandalkan dibandingkan untuk IrOx. Metode dan proses ini dapat ditingkatkan dan selanjutnya diperluas ke jenis bahan dan pelapis elektroda konduktif lainnya.
3. Robot bedah saraf
 Gambar 2 : Ukuran kartrid Needle Pincher Cartridge (NPC) dibandingkan dengan satu koin sen.
Gambar 2 : Ukuran kartrid Needle Pincher Cartridge (NPC) dibandingkan dengan satu koin sen.Polimer film tipis sebelumnya digunakan untuk probe elektroda [21], tetapi kekakuan lenturnya yang rendah mempersulit proses penyisipan. Neuralink telah mengembangkan suatu pendekatan dengan penyisipan robot dari probe fleksibel [28], yang memungkinkan penyisipan yang cepat dan andal dari sejumlah besar probe polimer yang bertujuan mencegah kerusakan pada jaringan pembuluh darah dan rekaman dari area kecil di otak. Kepala injeksi robot diposisikan dengan akurasi 10 mikron pada platform tiga sumbu berukuran 400 mm × 400 mm × 150 mm dan memegang rakitan “pemegang jarum” kecil yang cepat diganti (Gbr. 2, Gbr. 3A).
Jarum digiling dari kawat tungsten-renium dengan diameter 40 μm, dan dengan cara etsa elektrokimia, diameternya dikurangi menjadi 24 μm sepanjang panjang yang dimasukkan (Gbr. 2A). Ujung jarum dirancang untuk menggunakan loop untuk penyisipan - untuk mengangkut dan memasukkan masing-masing benang - dan untuk menembus ke dalam meninges dan jaringan otak. Jarum digerakkan oleh motor linier, memberikan kecepatan input variabel dan akselerasi retraksi yang cepat (hingga 30.000 mm s − 2) untuk memfasilitasi pemisahan probe dan jarum. Pincher adalah kawat tungsten dengan diameter 50 μm, ditekuk di ujungnya dan dengan penggerak di kedua arah aksial dan rotasi (Gbr. 2B). Ini berfungsi sebagai pendukung untuk probe selama pengangkutan dan sebagai panduan untuk memastikan bahwa benang dimasukkan di sepanjang jalur jarum. Gambar 4 menunjukkan urutan foto-foto proses memasukkan helai ke dalam simulasi agar-agar jaringan otak.
 Gambar 3
Gambar 3 : perangkat robot untuk memperkenalkan elektroda; tampilan yang diperbesar dari kepala input ditampilkan di inset. A. Dudukan jarum yang dimuat. B. Sensor kontak posisi otak dampak rendah. C. Modul ringan dengan beberapa panjang gelombang independen. D. Motor jarum. E. Satu dari empat kamera yang berfokus pada jarum selama penyisipan. F. Kamera dengan sudut pandang lebar bidang bedah. G. Kamera stereoskopik.
Kepala perangkat robot untuk memasukkan benang juga memiliki setumpuk kamera untuk menerima gambar (Gbr. 3E-G), yang digunakan untuk memandu jarum ke dalam loop benang, bertujuan sebelum memasukkan, melihat input secara real time dan memeriksa. Selain itu, kepala perangkat berisi enam modul cahaya independen, yang masing-masing mampu menerangi secara independen dengan panjang gelombang 405 nm, 525 nm dan 650 nm atau cahaya putih (Gbr. 3C). Penerangan 405 nm membangkitkan fluoresensi dari polimida dan memungkinkan tumpukan optik dan visi komputer untuk secara andal melokalisasi loop filamen (16 × 50) μm2 dan melakukan kontrol servo visual submikron untuk mengarahkan jarum diterangi 650 nm melalui loop. Kamera stereoskopik, perhitungan monokular perangkat lunak dengan kedalaman bidang yang diperluas, dan pencahayaan 525-nm memungkinkan untuk menilai secara akurat lokasi area permukaan korteks serebral.
Robot ini mendaftarkan lokasi dalam kotak koordinat umum pada tengkorak, yang dikombinasikan dengan pelacakan kedalaman, secara akurat menargetkan struktur otak yang ditentukan secara anatomis. Paket perangkat lunak kustom terintegrasi memungkinkan Anda untuk memilih sebelumnya semua titik penyisipan, memungkinkan Anda untuk merencanakan jalur penyisipan, meminimalkan kebingungan dan memuat di setiap utas. Salah satu fungsi perencanaan utama adalah kemampuan untuk menghindari kerusakan pada jaringan pembuluh darah selama penyisipan, yang merupakan salah satu keuntungan utama dari memperkenalkan elektroda secara terpisah. Ini sangat penting karena diyakini bahwa kerusakan sawar darah-otak memainkan peran kunci dalam respon inflamasi otak terhadap benda asing [33].
Robot memiliki mode penyisipan otomatis, yang memungkinkan Anda untuk memasukkan hingga 6 utas (192 elektroda) per menit. Terlepas dari kenyataan bahwa seluruh prosedur injeksi dapat diotomatisasi, ahli bedah mempertahankan kontrol penuh dan, jika diinginkan, dapat melakukan penyesuaian mikro secara manual dari posisi benang sebelum setiap pengenalan ke korteks. Robot bedah saraf ini kompatibel dengan selubung steril dan memiliki fitur yang memfasilitasi injeksi yang sukses dan cepat, seperti sterilisasi jarum ultrasonik otomatis. Kartrid pemegang jarum (NPC; Gambar 2C) adalah bagian dari kepala insert yang bersentuhan langsung dengan jaringan otak dan merupakan barang yang dapat dikonsumsi yang dapat diganti selama operasi dalam waktu kurang dari satu menit.
 Gambar 4
Gambar 4 : 1. Perangkat untuk input dengan utas mendekati simulasi jaringan otak. saya jarum dan kanula (catatan: jarum berlubang). ii. utas yang dimasukkan sebelumnya. 2. Masukkan menyentuh permukaan simulasi jaringan otak. 3. Jarum menembus kain imitasi, mengantarkan benang ke kedalaman yang telah ditentukan. iii. penyisipan benang. 4. Perangkat input utas berangkat, meninggalkan utas dalam fabric. iv. benang yang ditanamkan.
Dengan menggunakan sistem ini, kami menunjukkan keberhasilan administrasi dalam 87,1 ± 12,6% kasus (rata-rata ± standar deviasi), setelah 19 operasi. Selama penelitian, penyesuaian manual yang akurat dilakukan untuk menghindari kerusakan pada mikrovaskulatur saluran pada permukaan korteks, yang meningkatkan waktu administrasi total dari yang tercepat. Bahkan dengan mempertimbangkan koreksi ini, total waktu administrasi untuk penelitian ini rata-rata ~ 45 menit, dengan tingkat perkiraan pengenalan 29,6 elektroda per menit (Gbr. 6). Pendahuluan dilakukan dengan kraniotomi bilateral dari situs dengan luas (4 × 7) mm2 dengan interval> 300 μm antara filamen untuk memaksimalkan cakupan kortikal. Ini menunjukkan bahwa penyisipan robot elektroda polimer tipis adalah pendekatan yang efektif dan dapat diukur untuk merekam aktivitas sejumlah besar neuron di area otak yang ditentukan secara anatomis.
4. Elektronik
Perekaman terus-menerus sinyal dari ribuan elektroda menghadirkan masalah signifikan dengan elektronik dan pengemasan. Kepadatan saluran perekaman membutuhkan penempatan modul amplifikasi dan digitalisasi sinyal dalam rakitan perangkat itu sendiri, jika tidak, persyaratan untuk kabel dan konektor akan sangat tinggi. Modul perekaman ini harus memperkuat sinyal saraf yang lemah (<10 μVRMS), pada saat yang sama, menekan noise out-of-band, sampel dan digitalisasi sinyal yang diperkuat, dan hasil keluaran untuk pemrosesan waktu nyata - semua menggunakan daya dan ukuran sekecil mungkin.
Elektronik dibangun di atas sirkuit terpadu khusus kami (ASIC) untuk aplikasi Neuralink, yang terdiri dari 256 amplifier yang dapat diprogram secara individual ("piksel analog"), konverter analog-ke-digital (ADC) bawaan dan sirkuit kontrol periferal untuk serialisasi sinyal keluaran yang didigitalkan.
Pixel analog mudah disesuaikan: properti gain dan filter dapat dikalibrasi untuk memperhitungkan perubahan kualitas sinyal karena variabilitas proses dan lingkungan elektrofisiologis.
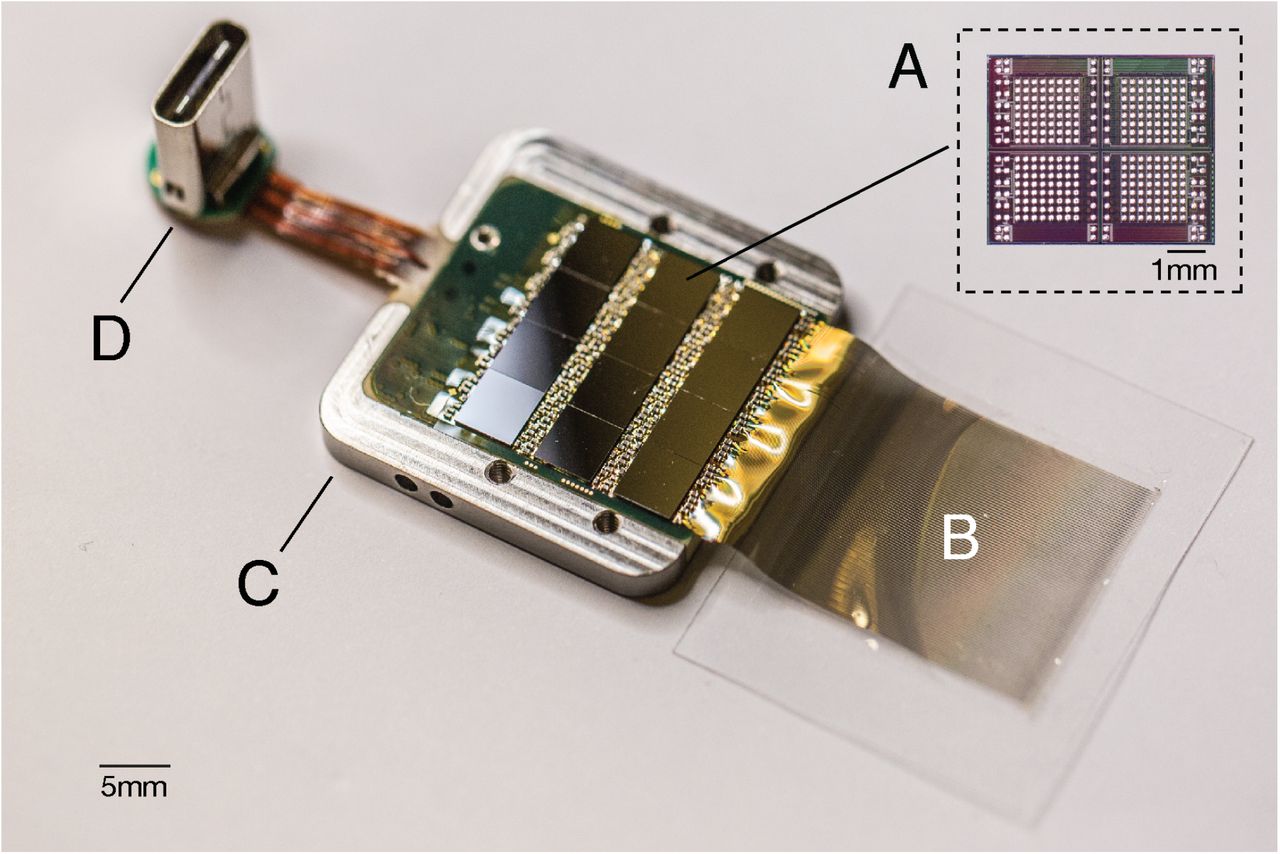
ADC internal melakukan pengambilan sampel pada frekuensi 19,3 kHz dengan resolusi 10 bit. Setiap piksel analog mengkonsumsi 5,2 μW, dan seluruh ASIC mengkonsumsi sekitar 6 mW, termasuk driver jam. Karakteristik ASIC Neuralink ditunjukkan pada Tabel 1, dan foto perangkat yang diproduksi ditunjukkan pada Gambar. 5A. Gambar 5 : Perangkat sentuh dalam kemasan. A. Setiap chip individu dalam ASIC mampu memproses 256 saluran data. Seluruh unit perangkat berisi 12 chip seperti itu, yang totalnya adalah 3.072 saluran. B. Benang polimer berdasarkan parylene. C. Kasing titanium (penutup dilepas). D. Konektor USB-C digital untuk transfer daya dan data.Neuralink ASIC adalah inti dari platform perekaman modular yang memudahkan penggantian komponen untuk penelitian dan pengembangan (Gbr. 5). Dalam sistem yang dibahas di sini, beberapa ASIC diintegrasikan ke dalam papan sirkuit tercetak standar (PCB) menggunakan metode koneksi flip-chip. Setiap sistem terdiri dari array gerbang yang dapat diprogram pengguna (sekitar FPGA); sensor suhu, accelerometer, magnetometer secara real time dan satu konektor USB-C untuk transmisi data dengan bandwidth penuh. Sistem ini dikemas dalam selungkup titanium yang dilapisi dengan C-Parylene, yang berfungsi sebagai penghalang kelembaban untuk mencegah penetrasi cairan dan memperpanjang masa pakai.Kami menggambarkan konfigurasi yang dibuat: sistem perekaman pada 1536 saluran ("Sistem A") dan sistem perekaman pada 3072 saluran ("Sistem B"), pada Tabel 2. Sementara Sistem A menggunakan ASIC Neuralink generasi sekarang, Sistem B menggunakan yang sebelumnya versi dengan fungsionalitas yang sebanding, tetapi dengan karakteristik kinerja yang lebih rendah. Sistem B dirancang untuk memaksimalkan kepadatan saluran dan digunakan untuk aplikasi yang membutuhkan jumlah saluran yang sangat besar. Sistem A, sebaliknya, dirancang untuk menyediakan instalasi yang lebih cepat dan lebih dapat diandalkan; itu dapat diinstal lima kali lebih cepat dari sistem B, yang lebih efisien.
Gambar 5 : Perangkat sentuh dalam kemasan. A. Setiap chip individu dalam ASIC mampu memproses 256 saluran data. Seluruh unit perangkat berisi 12 chip seperti itu, yang totalnya adalah 3.072 saluran. B. Benang polimer berdasarkan parylene. C. Kasing titanium (penutup dilepas). D. Konektor USB-C digital untuk transfer daya dan data.Neuralink ASIC adalah inti dari platform perekaman modular yang memudahkan penggantian komponen untuk penelitian dan pengembangan (Gbr. 5). Dalam sistem yang dibahas di sini, beberapa ASIC diintegrasikan ke dalam papan sirkuit tercetak standar (PCB) menggunakan metode koneksi flip-chip. Setiap sistem terdiri dari array gerbang yang dapat diprogram pengguna (sekitar FPGA); sensor suhu, accelerometer, magnetometer secara real time dan satu konektor USB-C untuk transmisi data dengan bandwidth penuh. Sistem ini dikemas dalam selungkup titanium yang dilapisi dengan C-Parylene, yang berfungsi sebagai penghalang kelembaban untuk mencegah penetrasi cairan dan memperpanjang masa pakai.Kami menggambarkan konfigurasi yang dibuat: sistem perekaman pada 1536 saluran ("Sistem A") dan sistem perekaman pada 3072 saluran ("Sistem B"), pada Tabel 2. Sementara Sistem A menggunakan ASIC Neuralink generasi sekarang, Sistem B menggunakan yang sebelumnya versi dengan fungsionalitas yang sebanding, tetapi dengan karakteristik kinerja yang lebih rendah. Sistem B dirancang untuk memaksimalkan kepadatan saluran dan digunakan untuk aplikasi yang membutuhkan jumlah saluran yang sangat besar. Sistem A, sebaliknya, dirancang untuk menyediakan instalasi yang lebih cepat dan lebih dapat diandalkan; itu dapat diinstal lima kali lebih cepat dari sistem B, yang lebih efisien.
 Sebuah stasiun pangkalan yang terhubung ke jaringan area lokal Ethernet mengubah aliran data dari sistem ini menjadi paket multicast 10G Ethernet yang memungkinkan pengguna berikutnya untuk memproses data dengan berbagai cara, misalnya, visualisasi data waktu-nyata [34] atau merekam ke disk. Setiap base station dapat terhubung hingga tiga implan secara bersamaan. Perangkat ini juga didukung oleh ekosistem perangkat lunak yang memberikan kemudahan penggunaan pada prinsip "plug and play" dengan konfigurasi nol: aliran data diaktifkan secara otomatis ketika kabel terhubung.
Sebuah stasiun pangkalan yang terhubung ke jaringan area lokal Ethernet mengubah aliran data dari sistem ini menjadi paket multicast 10G Ethernet yang memungkinkan pengguna berikutnya untuk memproses data dengan berbagai cara, misalnya, visualisasi data waktu-nyata [34] atau merekam ke disk. Setiap base station dapat terhubung hingga tiga implan secara bersamaan. Perangkat ini juga didukung oleh ekosistem perangkat lunak yang memberikan kemudahan penggunaan pada prinsip "plug and play" dengan konfigurasi nol: aliran data diaktifkan secara otomatis ketika kabel terhubung.5. Elektrofisiologi
Kami menanamkan kedua sistem A dan B untuk tikus Long-Evans jantan seperti yang dijelaskan dalam bagian 3. Semua prosedur hewan dilakukan sesuai dengan pedoman Dewan Penelitian Nasional untuk Perawatan dan Penggunaan Hewan Laboratorium dan telah disetujui oleh Komite Perawatan dan Penggunaan Hewan Neuralink. Rekaman elektrofisiologi dibuat ketika hewan dengan bebas menjelajahi arena yang dilengkapi dengan kabel yang memungkinkan pergerakan tanpa batas. Sistem A dapat merekam 1344 dari 1536 saluran secara bersamaan, konfigurasi saluran yang tepat dapat ditentukan secara sewenang-wenang selama perekaman; Sistem B dapat merekam dari semua 3072 saluran secara bersamaan. Sinyal broadband digital diproses secara real time untuk menentukan potensi aksi neuron (puncak) menggunakan algoritma deteksi online. Gambar 6 : Implantasi dan rakitan benang. A. Contoh gambar hidup yang menunjukkan permukaan korteks dengan benang yang ditanamkan dan perdarahan minimal. B. Unit sensor ("Sistem B"), ditanam secara permanen pada tikus.Persyaratan deteksi puncak waktu nyata untuk NQF berbeda dari kebanyakan studi neurofisiologis tradisional. Sementara sebagian besar ahli elektrofisiologi mengambil data offline dan menghabiskan banyak upaya untuk menolak peristiwa puncak positif palsu, peristiwa NQI harus dideteksi secara real time, dan parameter deteksi puncak harus memaksimalkan kinerja decoding. Dengan menggunakan perangkat lunak pendeteksi puncak online khusus kami, kami menemukan bahwa filter resolusi yang memungkinkan hasil positif palsu ± 0,2 Hz lebih baik daripada menetapkan batas ketat yang dapat menolak puncak nyata (data tidak ditampilkan).Dengan pertimbangan ini, kami menetapkan ambang batas di> 0,35 Hz untuk menentukan jumlah elektroda yang mencatat puncak. Karena kami biasanya tidak mengurutkan data berdasarkan puncak, kami tidak melaporkan beberapa unit per saluran. BMI decoder biasanya bekerja tanpa disortir dengan kehilangan kinerja minimal [36, 37]. Selain itu, hasil terbaru menunjukkan bahwa penyortiran puncak tidak diperlukan untuk penilaian yang akurat dari dinamika populasi saraf [38].Data dari percobaan terbaru menggunakan sistem A ditunjukkan pada Gambar. 7 dan ara. 8. Dalam percobaan ini, 40 dari 44 upaya penyisipan berhasil (90%) untuk total 1.280 elektroda yang ditanamkan, di mana 1020 dicatat secara bersamaan. Sinyal broadband yang direkam dari filamen yang disajikan menunjukkan potensi lokal dan aktivitas puncak Gambar 7. Contoh output dari sistem deteksi puncak ditampilkan sebagai raster pada Gambar. 8. Dalam contoh ini, dua konfigurasi perekaman yang tumpang tindih digunakan untuk merekam dari semua 1.280 saluran yang ditanamkan. Pada susunan ini, hasil puncak kami berjumlah 53,4% dari saluran, dan banyak puncak muncul di beberapa saluran tetangga, seperti yang diamati dalam percobaan lain dengan kepadatan elektroda yang tinggi [16, 17, 21]. Pada array lain dari sistem A, kami memperoleh hasil 59,10 ± 5,74% (rata-rata ± kesalahan standar rata-rata) dalam 19 operasi dengan maksimum 85,5%.
Gambar 6 : Implantasi dan rakitan benang. A. Contoh gambar hidup yang menunjukkan permukaan korteks dengan benang yang ditanamkan dan perdarahan minimal. B. Unit sensor ("Sistem B"), ditanam secara permanen pada tikus.Persyaratan deteksi puncak waktu nyata untuk NQF berbeda dari kebanyakan studi neurofisiologis tradisional. Sementara sebagian besar ahli elektrofisiologi mengambil data offline dan menghabiskan banyak upaya untuk menolak peristiwa puncak positif palsu, peristiwa NQI harus dideteksi secara real time, dan parameter deteksi puncak harus memaksimalkan kinerja decoding. Dengan menggunakan perangkat lunak pendeteksi puncak online khusus kami, kami menemukan bahwa filter resolusi yang memungkinkan hasil positif palsu ± 0,2 Hz lebih baik daripada menetapkan batas ketat yang dapat menolak puncak nyata (data tidak ditampilkan).Dengan pertimbangan ini, kami menetapkan ambang batas di> 0,35 Hz untuk menentukan jumlah elektroda yang mencatat puncak. Karena kami biasanya tidak mengurutkan data berdasarkan puncak, kami tidak melaporkan beberapa unit per saluran. BMI decoder biasanya bekerja tanpa disortir dengan kehilangan kinerja minimal [36, 37]. Selain itu, hasil terbaru menunjukkan bahwa penyortiran puncak tidak diperlukan untuk penilaian yang akurat dari dinamika populasi saraf [38].Data dari percobaan terbaru menggunakan sistem A ditunjukkan pada Gambar. 7 dan ara. 8. Dalam percobaan ini, 40 dari 44 upaya penyisipan berhasil (90%) untuk total 1.280 elektroda yang ditanamkan, di mana 1020 dicatat secara bersamaan. Sinyal broadband yang direkam dari filamen yang disajikan menunjukkan potensi lokal dan aktivitas puncak Gambar 7. Contoh output dari sistem deteksi puncak ditampilkan sebagai raster pada Gambar. 8. Dalam contoh ini, dua konfigurasi perekaman yang tumpang tindih digunakan untuk merekam dari semua 1.280 saluran yang ditanamkan. Pada susunan ini, hasil puncak kami berjumlah 53,4% dari saluran, dan banyak puncak muncul di beberapa saluran tetangga, seperti yang diamati dalam percobaan lain dengan kepadatan elektroda yang tinggi [16, 17, 21]. Pada array lain dari sistem A, kami memperoleh hasil 59,10 ± 5,74% (rata-rata ± kesalahan standar rata-rata) dalam 19 operasi dengan maksimum 85,5%. Gambar 7 : Kiri: Sinyal saraf broadband (tanpa filter) secara simultan diperoleh dari satu untai (32 saluran) yang ditanamkan di korteks serebral tikus. Setiap saluran (baris) sesuai dengan bagian elektroda pada filamen (diagram di sebelah kiri; bagian berjarak 50 μm). Puncak dan potensi lapangan lokal sudah jelas. Kanan: bentuk gelombang prospektif (tidak disortir); angka menunjukkan lokasi saluran dalam aliran. Bentuk gelombang tengah ditampilkan dalam warna hitam.
Gambar 7 : Kiri: Sinyal saraf broadband (tanpa filter) secara simultan diperoleh dari satu untai (32 saluran) yang ditanamkan di korteks serebral tikus. Setiap saluran (baris) sesuai dengan bagian elektroda pada filamen (diagram di sebelah kiri; bagian berjarak 50 μm). Puncak dan potensi lapangan lokal sudah jelas. Kanan: bentuk gelombang prospektif (tidak disortir); angka menunjukkan lokasi saluran dalam aliran. Bentuk gelombang tengah ditampilkan dalam warna hitam.6. Diskusi
Kami menggambarkan NIR dengan jumlah saluran yang tinggi dan resolusi satu puncak. Ini didasarkan pada sensor polimer fleksibel, sistem input robot dan elektronik berdaya rendah khusus. Sistem ini melayani dua tujuan utama: ini adalah platform penelitian untuk digunakan pada tikus dan berfungsi sebagai prototipe untuk implan klinis manusia di masa depan. Kemampuan untuk dengan cepat mengubah struktur dan menguji tikus memungkinkan Anda untuk dengan cepat meningkatkan perangkat, proses produksi dan perangkat lunak. Karena ini adalah platform penelitian, sistem menggunakan koneksi kabel untuk memaksimalkan throughput untuk streaming data mentah. Ini penting untuk mengevaluasi kinerja dan sangat penting untuk mengembangkan pemrosesan sinyal dan algoritma decoding. Sebaliknya,perangkat klinis yang akan diproduksi pada platform ini akan sepenuhnya dapat ditanamkan, yang akan memerlukan kemasan kedap udara, dan akan memiliki kompresi sinyal bawaan, pengurangan konsumsi daya, transfer energi nirkabel dan telemetri data melalui kulit tanpa menggunakan kabel. Gambar 8 : Perangkat kami memungkinkan deteksi aktivitas neuron yang luas, didistribusikan di beberapa area otak dan lapisan kortikal. Kiri: situs injeksi (lingkaran berwarna) ditunjukkan pada gambar otak tikus. [35] Kanan: raster dari 1020 saluran yang direkam secara simultan diurutkan berdasarkan aliran (warna sesuai dengan titik penyisipan). Bilah Samping: Gambar puncak yang diperbesar dari satu utas. Utas ini sesuai dengan yang ditunjukkan pada gambar. 7.Modulasi aktivitas neuron akan menjadi bagian penting dari antarmuka mesin otak klinis generasi berikutnya [39], misalnya, untuk memberikan rasa sentuhan atau proprioception untuk mengendalikan gerakan neuro-prostetik [40, 41]. Oleh karena itu, kami mengembangkan ASIC Neuralink yang mampu menstimulasi listrik pada setiap saluran, meskipun kami belum menunjukkan kemampuan ini di sini.Sistem NQI ini memiliki beberapa keunggulan dibandingkan pendekatan sebelumnya. Ukuran dan komposisi probe film tipis lebih cocok untuk sifat-sifat bahan jaringan otak daripada probe silikon yang biasa digunakan, dan karena itu dapat menunjukkan peningkatan biokompatibilitas [28, 21]. Selain itu, kemampuan untuk memilih di mana memasukkan probe kami, termasuk ke dalam struktur subkortikal, memungkinkan kami untuk membuat geometri susunan kita sendiri untuk menargetkan area otak tertentu tanpa merusak jaringan pembuluh darah. Fitur ini penting untuk menciptakan NKI berkinerja tinggi, karena distribusi elektroda dapat disesuaikan tergantung pada persyaratan tugas. AkhirnyaMiniaturisasi dan desain Neuralink ASIC memberikan fleksibilitas besar dalam desain sistem dan mendukung jumlah saluran yang sangat tinggi dalam ukuran praktis dan konsumsi daya yang rendah.Pada dasarnya, pendekatan kami untuk antarmuka mesin otak dapat diperluas dan terukur. Di sini kami melaporkan perekaman broadband simultan dari lebih dari 3.000 elektroda yang disisipkan dalam tikus yang bergerak bebas. Dalam otak yang lebih besar, beberapa perangkat dengan arsitektur ini dapat dengan mudah ditanamkan, dan karenanya kami dapat berinteraksi dengan jumlah neuron yang jauh lebih besar tanpa rekayasa ulang yang serius. Pengembangan lebih lanjut dari robotika bedah dapat memungkinkan kita untuk mencapai ini dengan cara yang sama tanpa secara signifikan meningkatkan waktu operasi.Sebelum perangkat dengan bandwidth tinggi menjadi cocok untuk penggunaan klinis, penting untuk menyelesaikan sejumlah masalah teknologi serius, tetapi sekarang mudah untuk membayangkan bahwa perangkat seperti itu akan memungkinkan pasien dengan cedera tulang belakang untuk secara cerdik mengontrol mouse dan keyboard digital. Dan dalam kombinasi dengan metode stimulasi sumsum tulang belakang yang meningkat dengan cepat [42], di masa depan pendekatan ini dapat mengembalikan fungsi motorik. Antarmuka saraf throughput tinggi harus memberikan banyak pilihan terapi baru.
Gambar 8 : Perangkat kami memungkinkan deteksi aktivitas neuron yang luas, didistribusikan di beberapa area otak dan lapisan kortikal. Kiri: situs injeksi (lingkaran berwarna) ditunjukkan pada gambar otak tikus. [35] Kanan: raster dari 1020 saluran yang direkam secara simultan diurutkan berdasarkan aliran (warna sesuai dengan titik penyisipan). Bilah Samping: Gambar puncak yang diperbesar dari satu utas. Utas ini sesuai dengan yang ditunjukkan pada gambar. 7.Modulasi aktivitas neuron akan menjadi bagian penting dari antarmuka mesin otak klinis generasi berikutnya [39], misalnya, untuk memberikan rasa sentuhan atau proprioception untuk mengendalikan gerakan neuro-prostetik [40, 41]. Oleh karena itu, kami mengembangkan ASIC Neuralink yang mampu menstimulasi listrik pada setiap saluran, meskipun kami belum menunjukkan kemampuan ini di sini.Sistem NQI ini memiliki beberapa keunggulan dibandingkan pendekatan sebelumnya. Ukuran dan komposisi probe film tipis lebih cocok untuk sifat-sifat bahan jaringan otak daripada probe silikon yang biasa digunakan, dan karena itu dapat menunjukkan peningkatan biokompatibilitas [28, 21]. Selain itu, kemampuan untuk memilih di mana memasukkan probe kami, termasuk ke dalam struktur subkortikal, memungkinkan kami untuk membuat geometri susunan kita sendiri untuk menargetkan area otak tertentu tanpa merusak jaringan pembuluh darah. Fitur ini penting untuk menciptakan NKI berkinerja tinggi, karena distribusi elektroda dapat disesuaikan tergantung pada persyaratan tugas. AkhirnyaMiniaturisasi dan desain Neuralink ASIC memberikan fleksibilitas besar dalam desain sistem dan mendukung jumlah saluran yang sangat tinggi dalam ukuran praktis dan konsumsi daya yang rendah.Pada dasarnya, pendekatan kami untuk antarmuka mesin otak dapat diperluas dan terukur. Di sini kami melaporkan perekaman broadband simultan dari lebih dari 3.000 elektroda yang disisipkan dalam tikus yang bergerak bebas. Dalam otak yang lebih besar, beberapa perangkat dengan arsitektur ini dapat dengan mudah ditanamkan, dan karenanya kami dapat berinteraksi dengan jumlah neuron yang jauh lebih besar tanpa rekayasa ulang yang serius. Pengembangan lebih lanjut dari robotika bedah dapat memungkinkan kita untuk mencapai ini dengan cara yang sama tanpa secara signifikan meningkatkan waktu operasi.Sebelum perangkat dengan bandwidth tinggi menjadi cocok untuk penggunaan klinis, penting untuk menyelesaikan sejumlah masalah teknologi serius, tetapi sekarang mudah untuk membayangkan bahwa perangkat seperti itu akan memungkinkan pasien dengan cedera tulang belakang untuk secara cerdik mengontrol mouse dan keyboard digital. Dan dalam kombinasi dengan metode stimulasi sumsum tulang belakang yang meningkat dengan cepat [42], di masa depan pendekatan ini dapat mengembalikan fungsi motorik. Antarmuka saraf throughput tinggi harus memberikan banyak pilihan terapi baru.7. Ucapan Terima Kasih
Kami ingin mengucapkan terima kasih kepada Laboratorium Nasional Livermore. Lawrence (LLNL), Laboratorium Nanoteknologi Berkeley Marvell, Pusat Penelitian Nirkabel Berkeley (BWRC), Pusat Nanoteknologi Stanford, dan mantan karyawan Neuralink saat ini atas kontribusi mereka terhadap pekerjaan yang dijelaskan di sini.8. Video tambahan
Video 1 : Serangkaian enam sisipan robot bedah saraf dalam tiruan agarosa dari jaringan otak. Penangkapan benang oleh jarum terjadi di luar bingkai. Perubahan warna latar belakang disebabkan oleh pencahayaan pada frekuensi cahaya yang berbeda pada berbagai tahap proses ganti dan pemasangan. Satu utas dimasukkan sebelum dimulainya video. Video .Video 2 : Visualisasi tiga dimensi dari proses implantasi ulir (data yang sama seperti pada Gambar. 8). Penyisipan ulir divisualisasikan dalam urutan yang sama seperti dalam operasi nyata, tetapi dalam mode pemutaran cepat. Ukuran dan kedalaman penyisipan adalah tipikal. Koordinat stereotactic dari setiap sisipan disajikan dalam dataset yang disediakan oleh Calabrese dan rekan kerja [35]. Video .9. Sumber[1] Leigh R. Hochberg et al. "Kontrol ensemble neuronal perangkat prostetik oleh manusia dengan tetraplegia." Dalam: Nature 442 (2006), hal. 164. issn: 1476-4687.
[2] Wei Wang et al. "Antarmuka Otak Elektrokortikografis pada Seorang Individu dengan Tetraplegia." Dalam: PLoS ONE 8 (2013), e55344.
[3] Tyson Aflalo et al. "Mengurai citra motorik dari korteks parietal posterior manusia tetraplegik." Dalam: Sains 348 (2015), hlm. 906–910. issn: 0036-8075.
[4] Leigh R. Hochberg et al. "Capai dan pegang oleh orang-orang dengan tetraplegia menggunakan lengan robot yang dikendalikan secara neurologis." Dalam: Nature 485 (2012), hal. 372. issn: 1476-4687.
[5] Jennifer L Collinger et al. "Kontrol neuroprostetik kinerja tinggi oleh seorang individu dengan tetraplegia." Dalam: The Lancet 381 (2013), hlm. 557-564. issn: 0140-6736.
[6] Gopala K. Anumanchipalli, Josh Chartier, dan Edward F. Chang. "Sintesis ucapan dari penguraian kata-kata yang diucapkan oleh saraf." Dalam: Alam 568 (2019), hlm. 493–498. issn: 0028-0836.
[7] György Buzsáki, Costas A. Anastassiou, dan Christof Koch. "Asal usul medan dan arus ekstraseluler - EEG, ECoG, LFP, dan paku." In: Nature Ulasan Neuroscience 13 (2012), p. 407. issn: 1471-0048.
[8] Bijan Pesaran et al. "Menyelidiki dinamika otak skala besar menggunakan rekaman potensial lapangan: analisis dan interpretasi." Dalam: Nature Neuroscience 21 (2018), hlm. 903–919. issn: 1097-6256.
[9] Taro Kaiju et al. "Resolusi Spasiotemporal EKG Resolusi Tinggi Potensi Bangkit Somatosensorik dengan Susunan Mikro-Elektroda yang Fleksibel." Dalam: Frontiers in Neural Circuits 11 (2017), hlm. 20.
[10] Rafael Yuste. "Dari doktrin neuron ke jaringan saraf." Dalam: Nature Ulasan Neuroscience 16 (2015), hlm. 487–497, diterbitkan: 1471-003x.
[11] Guosong Hong dan Charles M Lieber. "Teknologi elektroda baru untuk rekaman saraf." Dalam: Nature Ulasan Neuroscience (2019), hlm. 1-16. issn: 1471-003X.
[12] Edwin M. Maynard, Craig T. Nordhausen, dan Richard A. Normann. "The Intracortical Electrode Array Utah: Struktur rekaman untuk potensi antarmuka otak-komputer." Dalam: Elektroensefalografi dan Neurofisiologi Klinis 102,3 (1997), hlm. 228-239. issn: 0013-4694.
[13] Miguel AL Nicolelis et al. "Rekaman kronik, multisite, multielektroda pada monyet kera." Dalam: Prosiding National Academy of Sciences 100.19 (2003), hlm. 11041-11046. issn: 0027-8424. eprint:
www . pnas.org/content/100/19/11041.full.pdf.
[14] KD Wise et al. "Mikroelektro, Mikroelektronika, dan Sistem Saraf Tiruan Implan." Dalam: Prosiding IEEE 96.7 (2008), hlm. 1184-1202. issn: 0018-9219.
[15] Nicholas M. Dotson et al. "Sistem Perekaman Microdrive Semi-Kronik Skala Besar untuk Primata Non-Manusia." Dalam: Neuron 96 (2017), 769-782.e2. issn: 0896-6273.
[16] James J. Jun et al. "Probe silikon yang terintegrasi penuh untuk perekaman aktivitas saraf dengan kepadatan tinggi." Dalam: Nature 551 (2017), p. 232. issn: 1476-4687.
[17] Gian Nicola Angotzi et al. "SiNAPS: probe CMOS Sensor Active Pixel Sensor yang dapat ditanam untuk rekaman Neural berskala besar Simultan." Dalam: Biosensor dan Bioelektronika 126 (2018), hlm. 355-364. issn: 0956-5663.
[18] Felix Deku et al. "Array ultramicroelectrode silikon karbida silikon amorf untuk stimulasi dan perekaman saraf." Dalam: Journal of Neural Engineering 15.1 (2018), hal. 016007.
[19] Aziliz Lecomte, Emeline Descamps, dan Christian Bergaud. "Sebuah ulasan tentang pertimbangan mekanik untuk probe saraf implan kronis." Dalam: Journal of Neural Engineering 15 (2018), hal. 031001. issn: 1741-2552.
[20] Dion Khodagholy et al. "NeuroGrid: merekam potensi aksi dari permukaan otak." Dalam: Nature Neuroscience 18 (2014), hlm. 310-315. issn: 1097-6256.
[21] Jason E. Chung et al. "Rekaman Elektrofisiologi Multi-Kepadatan, Tahan Lama, dan Multi-Wilayah Menggunakan Array Elektroda Polimer." Dalam: Neuron 101 (2019), 21-31.e5. issn: 0896-6273.
[22] Stephan L. Chorover dan Anne-Marie Deluca. "Sebuah elektroda ganda baru yang manis untuk perekaman unit tunggal kronis pada hewan yang bergerak." Dalam: Fisiologi & Perilaku 9 (1972), hlm. 671–674. issn: 0031-9384.
[23] Jia Liu et al. “Alat suntik suntik elektronik”. Dalam: Nature Nanotechnology 10 (2015), hlm. 629-636. issn: 1748-3387.
[24] Tian-Ming Fu et al. "Pemetaan otak kronis jangka panjang yang stabil di tingkat neuron tunggal." Dalam: Metode Alam 13 (2016), hlm. 875–882. issn: 1548-7091.
[25] Flavia Vitale et al. "Mikroaktivasi Cairan Elektroda Fleksibel untuk Perekaman Saraf Tiruan." Dalam: Nano Letters 18.1 (2018), hlm. 326–335. eprint:
doi.org/10.1021/acs.nanolett.7b04184 .
[26] Lan Luan et al. "Probe nanoelektronik Ultraflexible membentuk jaringan parut glial yang andal - integrasi saraf bebas." Dalam: Science Advances 3 (2017), e1601966. issn: 2375-2548.
[27] Marc D. Ferro et al. "NeuroRoots, perangkat Antarmuka Mesin Otak yang terinspirasi bio, untuk perekaman jangka panjang." Dalam: bioRxiv (2018), hal. 460949.
[28] Timothy L Hanson et al. "" Mesin jahit "untuk perekaman saraf invasif minimal". Dalam: bioRxiv (2019). eprint:
www.biorxiv.org/content/early/2019/03/14/578542.full.pdf .
[29] Kip A Ludwig et al. "Rekaman saraf kronis menggunakan array silikon mikroelektroda secara elektrokimia diendapkan dengan poli (3,4-ethylenedioxythiophene) (PEDOT) film." Dalam: Journal of Neural Engineering 3 (2006), hal. 59. issn: 1741-2552.
[30] Seth J. Wilks et al. "Poly (3,4-ethylenedioxythiophene) sebagai Bahan Antarmuka Mikro-Neural untuk Elektrostimulasi." Dalam: Frontiers in Neuroengineering 2 (2009), hlm. 7. issn: 1662-6443.
[31] JD Klein, SL Clauson, dan SF Cogan. "Morfologi dan kapasitas pengisian film-film iridium oksida tergagap." Dalam: Jurnal Ilmu Vakum & Teknologi A: Vakum, Permukaan, dan Film 7 (1989), hlm. 3043-3047. issn: 0734-2101.
[32] SF Cogan, TD Plante, dan J. Ehrlich. "Film Iridium Oxide Sputtered (SIROFs) untuk Stimulasi Saraf Rendah dan Elektroda Perekaman." Dalam: Konferensi Internasional Tahunan ke-26 dari Rekayasa IEEE di Kedokteran dan Biologi Masyarakat 2 (2004), hlm. 4153-4156.
[33] Tarun Saxena et al. "Dampak dari darah kronis - penghalang penghalang otak pada fungsi elektroda intrakortikal". Dalam: Biomaterials 34 (2013), hlm. 4703-4713. issn: 0142-9612.
[34] Joshua H. Siegle et al. "Open Ephys: platform open-source, berbasis plugin untuk elektrofisiologi multichannel." Dalam: J. Neural Eng. 14 (2017), hlm. 1–13.
[35] E. Calabrese et al. "Sebuah atlas resonansi magnetik magnetik kuantitatif perkembangan otak tikus postnatal dengan perkiraan pertumbuhan dan variabilitas regional." Dalam: NeuroImage 71 (2013), hlm. 196–201.
[36] Sonia Todorova et al. "Untuk menyortir atau tidak menyortir: dampak spike-sorting pada kinerja decoding saraf." Dalam: Journal of Neural Engineering 11 (2014), hal. 056005. issn: 1741-2552.
[37] Breanne P Christie et al. "Perbandingan penyortiran lonjakan dan ambang batas bentuk gelombang tegangan untuk otak - kinerja antarmuka mesin intrakortikal." Dalam: Journal of Neural Engineering 12 (2015), hal. 016009. issn: 1741-2552.
[38] Eric M. Trautmann et al. "Estimasi Akurat Dinamika Populasi Saraf tanpa Penyortiran Spike." Dalam: Neuron (2019). issn: 0896-6273.
[39] Andy Zhou et al. “Perangkat neuromodulasi 128-kanal nirkabel dan bebas-artefak untuk stimulasi loop tertutup dan rekaman pada primata non-manusia.” Dalam: Teknik Biomedis Alam 3 (2019), hlm. 15–26.
[40] Joseph E O'Doherty et al. "Eksplorasi taktil aktif menggunakan antarmuka otak-mesin-otak". Dalam: Alam 479 (2011). issn: 1476-4687.
[41] Sharlene N Flesher et al. "Sensasi sentuhan yang dipulihkan meningkatkan kontrol lengan neuroprostetik." Dalam: bioRxiv (2019), hal. 653428
[42] Fabien B. Wagner et al. "Neuroteknologi yang ditargetkan mengembalikan jalan pada manusia dengan cedera tulang belakang." Dalam: Alam 563 (2018), hlm. 65–71. issn: 0028-0836.