Hari ini saya akan menceritakan dan menunjukkan cara mengulangi efek levitasi ultrasonik dengan tangan saya sendiri di rumah.
Dalam artikel sebelumnya,
satu ,
dua . Saya mendemonstrasikan levitasi semu. Kali ini semuanya nyata. Saya akan mulai dengan teorinya.
Getaran suara
Untuk memahami seluruh esensi dari efek levitasi, Anda perlu memahami apa itu gelombang suara dan gelombang berdiri.
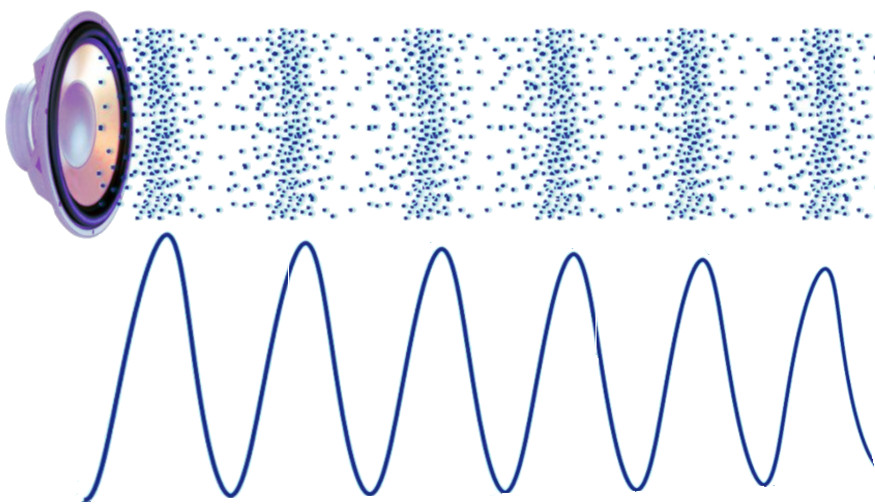
Karena itu, saya akan mulai dengan mereka. Gelombang akustik merambat ke segala arah dan terdiri dari dua gelombang setengah, positif dan negatif. Setengah gelombang positif adalah zona kompresi atau tekanan tinggi, di masa depan saya akan menyebutnya kompresi, dan setengah gelombang negatif zona pembuangan, kita akan menyebutnya dekompresi.
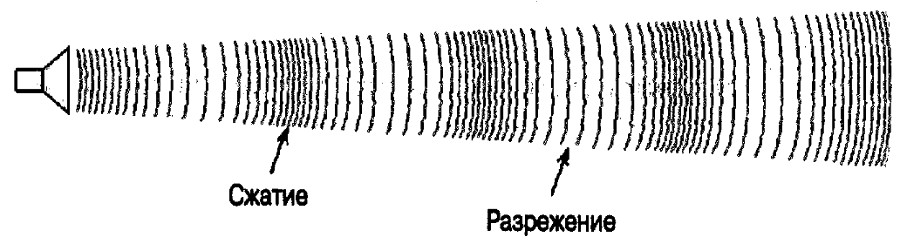
Dalam praktiknya, ini terlihat seperti ini: Diffuser speaker menciptakan kompresi ketika bergerak keluar, dan terdekompresi saat bergerak ke dalam. Ini jelas ditunjukkan pada gambar.
Kekuatan gelombang maksimum dibuat di dekat diffuser kepala dinamis dan, ketika bergerak menjauh dari emitor, secara bertahap kehilangan kekuatannya, semakin jauh dari speaker semakin lemah itu.
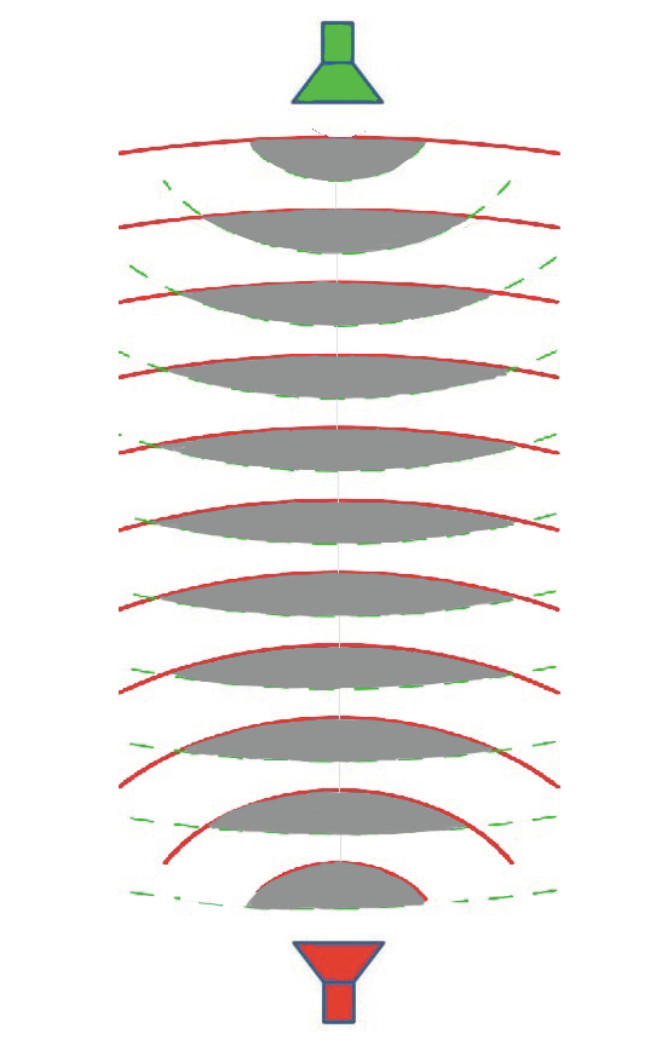
Gelombang berdiri adalah gelombang yang terbentuk ketika ditumpangkan dua counterpropagating, bertepatan dalam fase dan dengan frekuensi gelombang yang sama. Jika gelombang biasa kehilangan kekuatannya dalam proses propagasi di ruang angkasa, maka gelombang berdiri pada jarak kecil membentuk simpul dengan kekuatan yang kira-kira sama. Ini dicapai dengan melipat gelombang multi arah. Gelombang yang melemah diperkuat oleh gelombang yang datang. Untuk memahami bagaimana ini terjadi, lihat gambar di bawah ini. Node atau dalam rak kasus kami dari gelombang berdiri disorot dalam warna abu-abu. Di rak-rak ini (simpul) dan barang-barang yang dipegang.
 Panjang gelombang
Panjang gelombang adalah kecepatan suara dibagi dengan frekuensi osilasi. Pada suhu 20 ° C dan kelembaban 50%, suara merambat di lingkungan seperti itu pada kecepatan 340 m / s. Frekuensi resonansi emitor piezoelektrik kami adalah sekitar 40.000 Hz. Hasilnya, kami memperoleh panjang gelombang 340.000 mm / 40.000 Hz = 8,5 mm. Panjang gelombang berdiri akan menjadi 8,5 mm yang sama.
Emitor dapat ditempatkan pada jarak yang berbeda satu sama lain, tetapi harus selalu kelipatan dari panjang gelombang. Semakin kecil jarak antara emitor, semakin kuat node dari gelombang berdiri. Semakin banyak ruang antara pemancar akustik, semakin banyak node di antara mereka, tetapi kekuatan dari node melemah dan sebaliknya. Anda juga perlu memahami bahwa untuk menahan sejumlah besar objek di simpul gelombang dan pada jarak yang lebih besar antara penghasil ultrasonik, kepala piezo yang lebih kuat akan dibutuhkan. Misalnya, dari radar parkir mobil, atau dari pelembap rumah tangga. Pada artikel ini, saya menganggap emitor ultrasonik yang paling terjangkau dan terjangkau. Yang dapat dihapus dari
pengintai HC-SR04 .
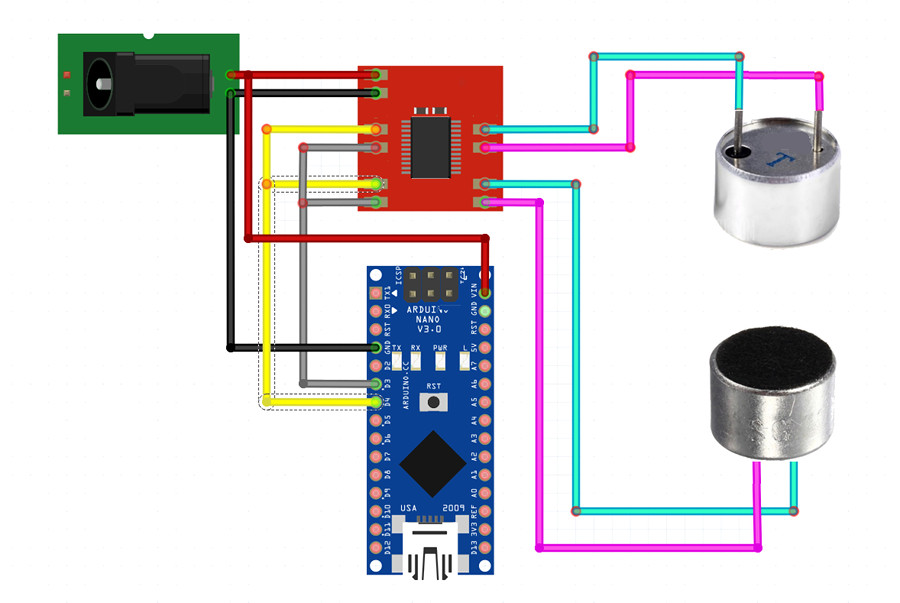
Sambungan diagram - Saya menggunakan
Arduino nano dan
driver motor MX1508 , yang bisa saya lakukan dengan generator NE555, dan sebagai penguat untuk emitor, gunakan chip MAX232 yang diinstal pada rangefinder HC-SR04, tetapi saya memilih jalur yang lebih sederhana untuk saya yang menghemat waktu saya. Karena saya membutuhkan waktu tidak lebih dari 5 menit untuk merakit levitron akustik. Saya membuat koneksi dengan kit kawat dupont.
Deskripsi sketsa Arduino
Kode ini tidak istimewa. Semuanya terjadi untuk mengatur timer dan menyentak port D Arduino. Untuk melakukan ini, letakkan Timer1 dalam mode reset secara bersamaan (CTC) dan sekarang, ketika nilai register akun TCNT1 bertepatan dengan nomor yang ditentukan dalam register perbandingan OCR1A, sebuah interupsi akan dipicu, pada prosesor di mana seluruh port D akan dibalik. Setelah itu, register penghitungan akan diatur ulang dan setelah keluar. Prosesor akan memulai proses penghitungan yang baru.
Nilai register OCR1A yang kita butuhkan dihitung sebagai berikut: karena pembagi dalam register TCCR1B dimatikan, kita mengambil frekuensi clock 16.000.000 Hz dan membaginya dengan frekuensi interupsi yang diinginkan 80.000 Hz, akibatnya kita mendapatkan angka 200, ini akan menjadi nilai kita untuk mendaftar OCR1A.
Mengapa 80 kHz, bukan 40 kHz, Anda bertanya? Karena periode dalam pawang terbentuk dalam dua operasi interupsi. Selama operasi pertama, bentuk output D3 = 0 dan D4 = 1, dan di yang kedua, D3 = 1 dan D4 = 0.
Kode untuk Arduino
volatile uint8_t portD3_D4 = 8; // D3 D4 void setup() { pinMode(3, OUTPUT); pinMode(4, OUTPUT); // Timer1 TCNT1 = 0; TCCR1A = 0; TCCR1B = 0; OCR1A = 199; // 16 / 80 = 200 TCCR1B = (1 << WGM12)|(1 << CS10); // CTC, TIMSK1 |= (1 << OCIE1A); // } void loop () {} ISR (TIMER1_COMPA_vect) // { PORTD = portD3_D4; // portD3_D4 = 255-portD3_D4;// }