Bagian 2Bagian 3Beberapa foto diambil dari situs web
Hack The Moon .
Artikel ini dipresentasikan pada Konferensi Tahunan ke 27 tentang Navigasi dan Navigasi dari American Society of Astronautics (AAS) di Breckenridge, Colorado, 6 Februari 2004. Versi yang Anda tawarkan berisi ilustrasi tambahan, komentar, dan koreksi kecil.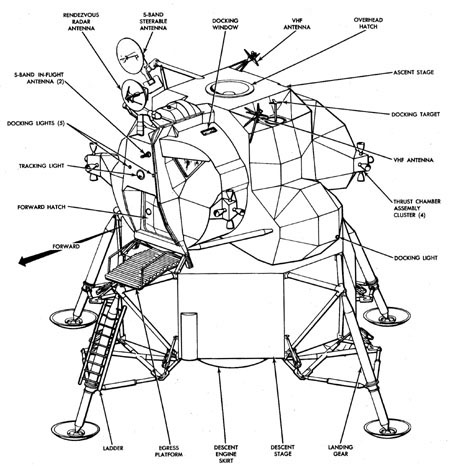
ABSTRAK: Misi Apollo 11 berhasil mendarat di bulan, meskipun ada dua masalah komputer yang mempengaruhi modul bulan selama pendaratan terkontrol. Masalah yang belum terselesaikan dalam antarmuka radar kedekatan mengambil sekitar 13% dari waktu siklus komputer on-board, mengakibatkan lima crash dan reboot program. Masalah yang kurang diketahui disebabkan oleh data yang salah, yang menyebabkan fluktuasi dalam dorongan mesin pendaratan modul bulan, karena algoritma kontrol dorong berada pada batas stabilitas. Penjelasan tentang masalah ini memungkinkan untuk menggambarkan sistem operasi komputer on-board Apollo dan program kontrol pendaratan di bulan.
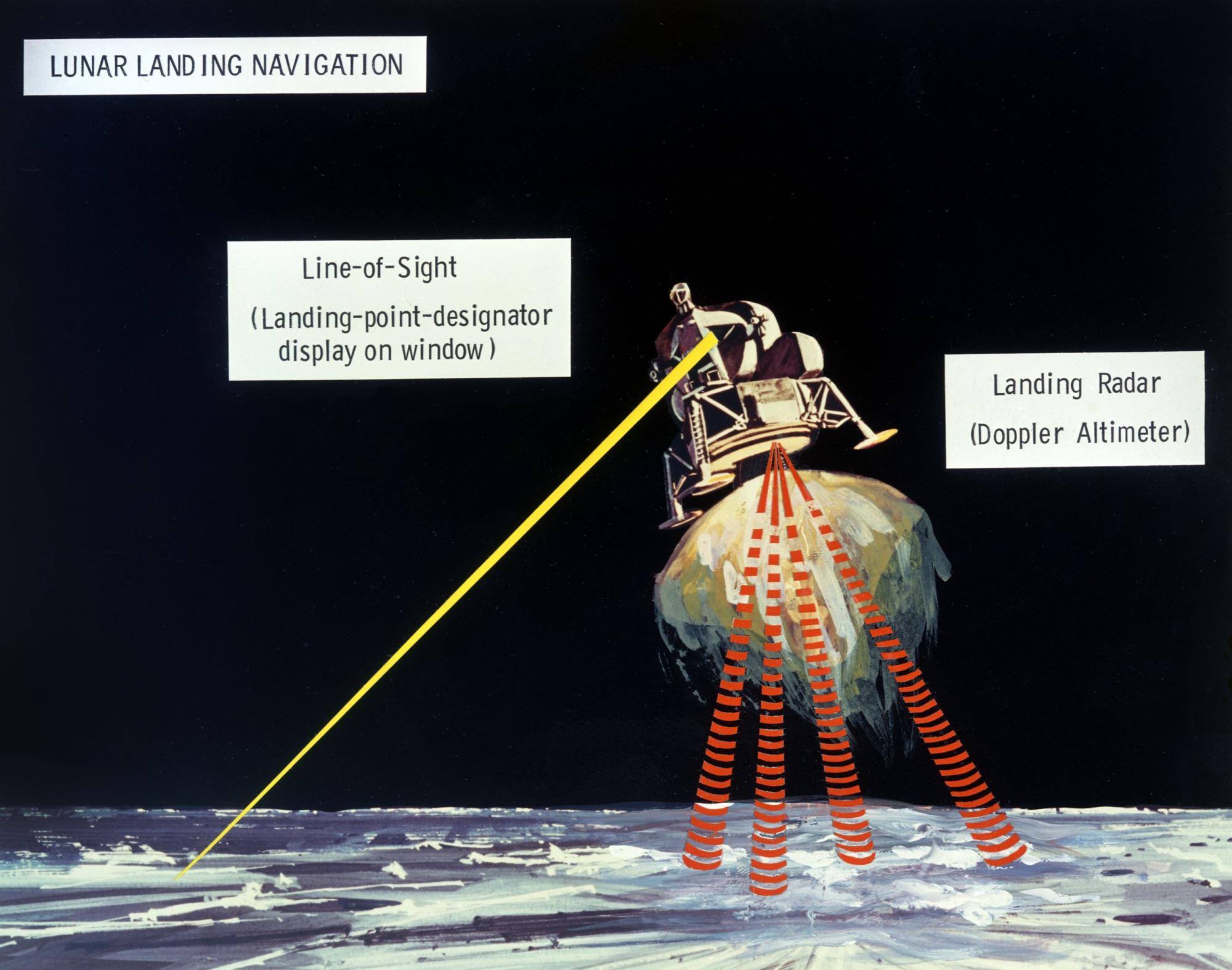 Gambar yang menggambarkan pendaratan Modul Wisata Lunar (LEM) di permukaan bulan. Pilot LEM menggunakan radar pendaratan dan pengukuran visual melalui jendela LEM untuk melacak dan memverifikasi situs pendaratan.
Gambar yang menggambarkan pendaratan Modul Wisata Lunar (LEM) di permukaan bulan. Pilot LEM menggunakan radar pendaratan dan pengukuran visual melalui jendela LEM untuk melacak dan memverifikasi situs pendaratan.LM-1, juga dikenal sebagai Apollo 5, adalah misi tak berawak selama 6 jam di orbit terestrial yang hanya melibatkan modul bulan. Itu terjadi pada 22 Januari 1968. Bagi kita yang mengembangkan perangkat lunak komputer on-board LGC (Lunar Module Guidance Computer), ini adalah penerbangan pertama. Peristiwa yang sekarang bagi kita nampaknya jauh sekali.
Misi tersebut mencakup dua permulaan mesin dari sistem pendaratan reaktif modul bulan (Sistem Descent Propulsion LM, DPS). Pada pengapian kedua, Allan Klumpp, yang mengembangkan persamaan kontrol pendaratan di bulan [1], berdasarkan karya George Cherry [2], menemukan cara untuk mensimulasikan pendaratan di bulan untuk orbit Bumi. Itu terdiri dari tiga fase: fase pengereman, fase "visibilitas" dan fase pendaratan akhir dari modul pendaratan. Start pertama engine diperlukan untuk mensimulasikan manuver transisi ke orbit turun sebelum mendarat. Ini adalah penyalaan pertama mesin modul bulan dalam penerbangan, berlangsung sekitar 38 detik.
LGC (modul bulan on-board komputer) berada di fase ke-9 dari misi LM-1, sebuah program yang mengendalikan pengapian pertama DPS. Kemudian misi diselenggarakan lebih fleksibel dan penyalaan pertama DPS dilakukan pada langkah P40 program. (Untuk program penerbangan yang lebih terperinci, lihat di
sini .
Kira-kira. Menerjemahkan. ) Manuver LM ke posisi penyalaan. Komputer memulai hitungan mundur ke pengapian. Pada detik ke-30, tugas READACCS dijalankan untuk pertama kalinya. Dia membaca pembacaan accelerometer dalam modul inersia dari pesawat ruang angkasa, mengatur tugas SERVICER untuk dieksekusi, yang dimulai segera, dan mengatur dirinya untuk mengeksekusi dengan penundaan 2 detik. Ini diinisialisasi oleh vektor negara dari program integrasi orbital, dan persamaan navigasi mulai menggunakan data accelerometer untuk menghitung posisi dan vektor percepatan. READACCS dan SERVICER mulai setiap dua detik selama seluruh fase penerbangan dengan mesin dihidupkan. Tujuh setengah detik sebelum kunci kontak, pembakaran RCS (Reaction Control System) yang “kotor” dimulai. Kami semua melangkah lebih dekat ke sistem komunikasi yang menghubungkan kami ke pusat kendali penerbangan Houston.
Kami mendengar "Mesinnya hidup" ... dan, setelah beberapa detik ... "Mesinnya mati."
Segera kami menyadari apa yang terjadi. Sepotong kecil kode di SERVICER, yang disebut "monitor delta-V", memutuskan bahwa mesinnya rusak dan mengirim perintah untuk mematikan mesin. Tapi mengapa? Untuk memungkinkan mesin memasuki mode dorong, kode ini selalu menunggu periode waktu tertentu setelah menyalakan mesin sebelum mulai memantau mesin. Namun kali ini, pada akhir periode ini, mesin masih belum memberikan traksi yang cukup untuk memenuhi kriteria monitor traksi mesin.
Kalkulasi yang dipublikasikan [3] mengaitkan lambatnya keluarnya DPS dengan dorongan penuh oleh fakta bahwa tank-tank modul bulan tidak berada di bawah tekanan penuh. Tetapi penyelidikan yang dilakukan oleh penulis menunjukkan bahwa masalahnya berbeda. Untuk sistem bahan bakar DPS, selama operasi normal, katup akan terbuka di mana bahan bakar memasuki pipa ketika mesin siap untuk operasi, beberapa detik sebelum penyalaan. Namun dalam modul lunar, katup yang mengatur aliran bahan bakar dari pipa ke mesin mungkin bocor. Untuk mencegah kemungkinan, masuknya
bahan bakar hipergolat ke dalam mesin (yang penuh dengan ledakan), sesaat sebelum penerbangan, diputuskan untuk menunda aliran bahan bakar ke dalam mesin sampai saat penyalaan [4].
Mesin memiliki start yang lambat, bukan karena tangki berada di bawah tekanan rendah, tetapi karena bahan bakar belum mencapai mesin. Akan sangat sederhana bagi kami untuk mengatur pengaturan parameter berapa lama monitor delta-V harus menunggu sebelum memeriksa mesin - tetapi tidak ada yang memberi tahu kami tentang hal itu.
Houston mengirim sinyal untuk mematikan komputer on-board. Tujuan utama misi LM-1 dicapai dengan kontrol dari Bumi. Kami, mereka yang memprogram komputer modul bulan, jatuh ke dalam kesedihan dan kekecewaan, yang diperkuat oleh reaksi publik, yang tidak membedakan antara kesalahan dalam program dan data yang salah. Dan ini bukan kasus terakhir ketika parameter yang tampaknya aman terkait dengan karakteristik mesin pendaratan, menempatkan misi hampir di ambang kegagalan.
* * *
Pengembangan sistem navigasi untuk kapal Apollo dipercayakan kepada Massachusetts Institute of Technology (MIT Instrumentation Laboratory) di Cambridge. Di bawah kepemimpinan pendirinya, "Dock," laboratorium Charles Stark Draper (Charles Stark Draper), sejak 1939, memainkan peran utama dalam pengembangan sistem navigasi inersia. Kontrak dengan kami untuk pengembangan Sistem Navigasi Bimbingan Utama Apollo dan Sistem Kontrol, PGNCS, diucapkan “ping”, adalah kontrak pertama yang ditandatangani di bawah program Apollo. Doc sendiri mendaftar dalam penerbangan untuk misi ini.
Pada tahun 1970, Laboratorium Instrumentasi berganti nama menjadi Laboratorium Draper Charles Stark, dan pada tahun 1973 menjadi independen dari MIT, meskipun memiliki koneksi dengan itu. Laboratorium Draper masih aktif terlibat dalam program luar angkasa berawak NASA.
 Navigasi pertemuan Gambar tersebut menggambarkan konvergensi dan docking LEM dan modul perintah di orbit bulan setelah mengangkat dari permukaan bulan.
Navigasi pertemuan Gambar tersebut menggambarkan konvergensi dan docking LEM dan modul perintah di orbit bulan setelah mengangkat dari permukaan bulan.Program yang mengendalikan penerbangan modul bulan disebut SUNBURST. Pada saat penerbangan LM-1, kami sudah mengerjakan SUNDANCE, program manajemen misi Apollo 9 di orbit di sekitar Bumi. SUNDANCE, pada gilirannya, berubah menjadi LUMINARY, sebuah program untuk Apollo 10 dan misi pendaratan di bulan. Misi Apollo 11 pada bulan Juli 1969 dikendalikan oleh program LUMINARY versi 99. Versi 116 dikendalikan oleh Apollo 12 pada bulan Desember, dll.
Artikel ini mematuhi nama-nama yang digunakan dalam program Apollo. Nama-nama program, nama-nama variabel dalam program, kami biasanya menulis dalam huruf besar.
Program untuk komputer ini secara tidak resmi kami sebut "tali" karena fakta bahwa mereka disimpan di komputer on-board dalam ROM menyerupai tali kabel tembaga yang dikepang. Untuk misi bulan, memori program dibatasi hingga 36K kata, masing-masing 16 bit, ditambah paritas bit, dan ditambah 2K kata RAM. Dengan mempertimbangkan memori komputer Apollo AGC dan modul perintah (CM) yang berisi program COLOSSUS, akan benar untuk mengatakan bahwa kita duduk di Bulan dengan memori 152 KB.
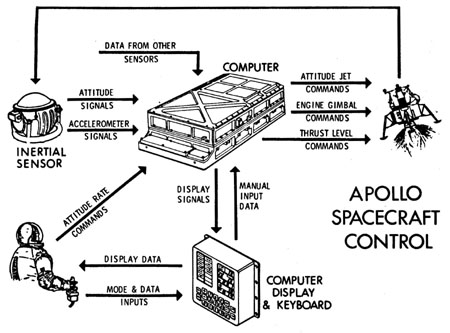
Gambar 2.
Modul Apollo Lunar, Bimbingan Utama dan Sistem Navigasi, PGNSAGC dirangkai dalam penutup aluminium-magnesium yang kokoh, kedap udara, berwarna emas anodized, berukuran sekitar enam inci kali satu kaki dua kaki, beratnya 70 pound dan mengkonsumsi sekitar 55 watt. Rangkaian logikanya terdiri dari 5.600 elemen tiga-input ATAU TIDAK, dikemas dalam dua sirkuit terpadu datar. Eldon Hall (Eldon Hall), pengembang utama mesin, membuat keputusan berani untuk menggunakan microchip untuk komputer meskipun ketidakmatangan teknologi ini di awal 60-an [5].
LGC (dengan semua peralatan) ada di belakang para astronot di belakang kokpit modul bulan. Sebelum para astronot ada struktur kaku yang disebut "dasar navigasi", di mana teleskop penunjuk dan modul pengukuran inersia (IMU) dipasang pada koordinat geometris tetap. Keyboard dan modul tampilan (DSKY) dipasang di antara kursi para astronot. Gambar 2 menunjukkan komponen dan antarmuka tingkat tinggi dari sistem navigasi utama modul bulan.
Sistem IMU (unit pengukuran inersia), yang dirangkai dalam benda berbentuk bola dengan diameter sekitar satu kaki, adalah jantung dari sistem navigasi. Hatinya sendiri, dikelilingi oleh tiga suspensi tertanam satu sama lain, adalah "anggota tetap", sebuah platform kecil di mana dipasang tiga giroskop presisi dan tiga akselerometer, yang harus berada dalam posisi tertentu untuk orientasi inersia kapal. Setiap penyimpangan dalam posisi kapal dicatat oleh giroskop, dan suspensi dipindahkan untuk memperbaiki posisi, semua ini terjadi dengan akurasi tinggi dan (hampir) tidak tergantung pada posisi kapal, "anggota tetap" memberikan posisi referensi konstan. Matriks REFSMMAT menyatakan perpindahan dari istilah tetap relatif terhadap kerangka referensi inersia. Accelerometer mengukur kenaikan kecepatan selama fase penerbangan dengan mesin dihidupkan dalam sistem koordinat anggota tetap.
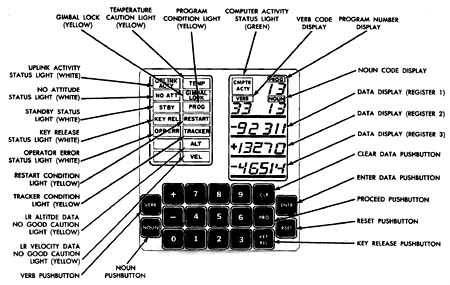
Gambar 3:
Tampilan Modul Lunar dan Modul Keyboard (DSKY)DSKY adalah antarmuka manusia-mesin utama untuk LGC. Untuk tampilan yang memiliki tiga register tujuan umum, masing-masing yang menyimpan nomor tanda lima tempat desimal panjang, tiga register dari dua digit desimal untuk menunjukkan fase saat penerbangan (angka 63-68 untuk mendarat di bulan), serta "kata kerja" dan "Kata benda". Kata kerja dan kata benda diperlukan untuk bahasa komunikasi primitif antara tim dan komputer. Fase penerbangan dan kombinasi kata kerja / kata benda dalam beberapa kasus ditetapkan oleh program, dan dalam kasus lain dimasukkan oleh kru dari keyboard dengan 19 tombol. Isi dari tiga register umum tergantung pada kata benda dan kata kerja yang dimasukkan. DSKY juga berisi serangkaian lampu indikator yang dikendalikan oleh komputer, dan indikator aktivitas komputer yang menyala ketika LGC tidak dalam mode siaga.
Komputer AGC dalam modul bulan dan dalam modul perintah diprogram dalam dua bahasa. Yang kami sebut "Basic," atau lebih tepatnya, "Yul," adalah assembler dengan sekitar 40 tim [6], yang ditulis oleh Hugh Blair-Smith. Yang kedua adalah juru bahasa yang mengartikan bahasa (pada kenyataannya, satu set subprogram), yang dirancang untuk menyederhanakan perhitungan navigasi, termasuk vektor dan matriks angka presisi ganda (angka titik tetap 30-bit), tetapi sangat lambat. "The Interpreter" ditulis oleh Charles Muntz.
Siklus memori AGC memiliki durasi 11,7 μs. Penambahan presisi tunggal dalam assembler mengambil dua siklus. Penggandaan vektor presisi ganda dalam interpreter membutuhkan waktu sekitar 5 ms. Salah satu tantangan pemrograman AGC adalah juggling dalam dua bahasa untuk mencapai keseimbangan kecepatan dan kekompakan terbaik dalam setiap kasus.
Program komputer Apollo cukup kecil untuk dimuat dalam satu daftar, biasanya kertas lipat dengan halaman 11 x 15 inci dengan ketebalan bundel 6 inci. Cantuman termasuk daftar karakter yang dapat dilacak selama pelaksanaan streaming. Memiliki satu daftar, kami selalu tahu bahwa jawabannya ada di dalamnya ketika kami mencari bug, meskipun kadang-kadang sulit ditemukan.

Gambar 4.
Daftar program modul bulan LUMINARY 131Arsitektur LGC adalah modular tetapi eklektik. Di dalam komputer, kami menggunakan sistem metrik, setidaknya untuk tugas navigasi. Tetapi operator NASA, dan terutama astronot, lebih memilih sistem tindakan Inggris. Ini berarti bahwa sebelum ditampilkan, ketinggian dan kecepatan vertikal (misalnya) dikonversi dari sistem metrik menjadi kaki dan kaki. Massa dan traksi dinyatakan dalam pound. Karena tujuan dari artikel ini adalah untuk menunjukkan sebagian apa yang kami sebut hal-hal di era pesawat ruang angkasa itu, saya akan menggunakan unit yang diterima pada waktu itu.
 Kartun di Dok Draper
Kartun di Dok Draper* * *
Sekarang departemen pemantauan misi di Cambridge Parkway 75 telah dipindahkan ke ruangan yang lebih besar, pada 20 Juli 1969 ruangan itu penuh sesak, terlepas dari upaya pembersihan yang dilakukan oleh kami yang paling terlibat dalam fase misi ini. Kami mendengarkan sebuah kotak squaw (alat komunikasi) di ruang kelas, sementara seperempat juta mil dari sini sebuah pesawat ruang angkasa berawak meninggalkan bulan dan mendekati titik bawah orbitnya (perilune), pada ketinggian sekitar 50.000 kaki di atas kawah bertitik permukaan, dan menyalakan mesin pendaratan.
Tim mengetik "kata kerja 37" di komputer, yang berarti fase P63, persiapan untuk penurunan yang terkendali, dan tetap berada di modul perintah sampai mesin dibakar. Komputer mengeksekusi algoritma yang menghitung waktu pengapian yang tepat dan posisi di mana modul lunar harus pada saat itu. Selanjutnya, pesawat ruang angkasa berubah ke posisi yang diinginkan. Pada saat penyalaan, nosel mesin harus diarahkan hampir ke depan, terhadap vektor kecepatan orbital kapal.
Sekarang komputer memberi kode kesalahan 500. Dia percaya bahwa antena radar berada di posisi yang salah. Tim melihat bahwa sakelar berada di posisi yang benar, tetapi tetap sakelar itu, dan kesalahan menghilang. Ini tidak terkait dengan peristiwa yang terjadi selanjutnya, tetapi memperkuat kecurigaan kami bahwa sinyal yang memberitahu komputer posisi antena atau sakelar terkadang berbohong.
Kontrol ditransfer ke program BURNBABY, program kontrol pengapian utama yang kami tulis setelah LM-1, untuk menghemat memori dengan menggunakan algoritma yang sama pada periode sebelum pengapian. Pada DSKY, "Verb 6, kata benda 62" ditampilkan. Register tengah berisi waktu dalam hitungan menit dan detik, hitungan mundur ke kunci kontak dimulai. Dalam 35 detik tampilan menjadi kosong, dalam 30 detik menyala kembali. Ini adalah sinyal bahwa algoritma "Average-G" telah dimulai. Dalam 7,5 detik, luka bakar "kotor" dimulai. 5 detik sebelum start, layar berkedip, menunggu perintah mulai dari kru. Buzz Aldrin, pilot modul bulan, berdiri di sebelah kanan kokpit, ia memikul tanggung jawab utama untuk bekerja dengan DSKY. Dia menekan "PROCEED".
Pada waktu 102: 33: 05, dari awal misi, bahan bakar yang menyala sendiri memasuki mesin pendaratan dan dinyalakan dengan throttle 10%. Armstrong bahkan tidak merasakan sedikitpun sentakan - akselerasinya kurang dari 1 / 25g. Layar menyoroti "kata benda 63" dan tiga layar register sekarang menunjukkan kecepatan penuh 5559,7 kaki / s, dan kecepatan vertikal -2,2 kaki / s, ketinggian di atas permukaan 49971 kaki [8]. Dudukan engine menyelaraskan vektor dorong engine pendaratan di tengah massa kapal. 26 detik setelah penyalaan, perangkat lunak DPS mencapai daya dorong maksimum 9.870 pound (43.900 N), 94% dari £ 10.500 yang diumumkan secara resmi, dan pada saat yang sama, manuver pendaratan dimulai.
P63 adalah fase pengereman, satu-satunya tujuan adalah untuk menekan kecepatan vertikal. Itu berakhir 8 menit setelah kapal mencapai kondisi ujung yang dikenal sebagai "gerbang tinggi" pada ketinggian 7.400 kaki. Fig. 5 menggambarkan fase pendaratan di bulan.
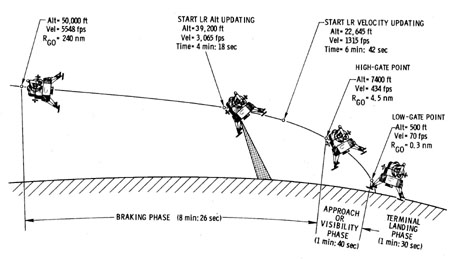
Fig. 5.
Fase pendaratan di bulan (angka perkiraan)Pada waktu 102: 36: 55 dari awal misi, Neil Armstrong, komandan, berdiri di sisi kiri modul bulan, dan menggunakan joystick untuk memutar pesawat ruang angkasa di sekitar poros dorongan, sehingga jendela pesawat ruang angkasa akan memungkinkan para astronot untuk melihat ke bawah ke permukaan, karena saat itu diarahkan ke luar angkasa, dan Bumi terlihat ke dalamnya. Tapi kapal itu berputar terlalu lambat. Armstrong mengubah batas kecepatan autopilot dari 5 deg / s ke 25 deg / s [9]. Segera sebelum manuver ini, radar pendarat memberi sinyal "data adalah normal."
Tidak mungkin untuk menavigasi seakurat mendarat dengan aman di permukaan bulan tanpa mengetahui jarak dan kecepatan saat ini. Informasi ini disediakan oleh radar pendaratan. Terlepas dari kemungkinan pemeriksaan yang dilakukan oleh perangkat lunak, data radar tidak dapat dimasukkan dalam vektor negara tanpa konfirmasi dari komando dan pusat kendali penerbangan. Sekitar lima menit setelah penyalaan, Aldrin memasukkan "kata kerja 16, kata benda 68" - permintaan untuk menampilkan "kata benda", di mana register ketiga menunjukkan perbedaan antara ketinggian yang dilihat radar dan komputer yang dihitung. Variabel ini, disebut DELTAH, sekitar -2900 kaki. Ini berada dalam batas kesalahan. Data radar memasuki sistem navigasi tanpa mempengaruhi jalur penerbangan.
Kemudian kami mendengar kata-kata "peringatan perangkat lunak". Di Cambridge kami saling memandang. Di atas pesawat ruang angkasa, Aldrin melihat sinyal PROG menyala dan layar lagi menunjukkan "kata kerja 6, kata benda 63". Dia dengan cepat menekan "kata kerja 5 kata benda 9".
Kode peringatan 1202 muncul pada tampilan DSKY. Peringatan ini muncul jika komputer kelebihan beban, mis. lebih banyak tugas yang berjalan daripada ada cukup waktu untuk mereka. Di Cambridge mereka berkata: "peringatan eksekusi, tidak ada tempat dalam ingatan." Armstrong kemudian berkata dengan kasar: "Beri kami arahan untuk peringatan 1202" [10].Peristiwa mulai berkembang dengan cepat, terlalu cepat bagi kami untuk mengirimkan data dari Cambridge. Ini dilakukan oleh pusat kendali penerbangan di Houston. Kisah tentang apa yang terjadi selanjutnya sering diulang - apa yang dikatakan perwira berusia 26 tahun Steve Bales “lanjutkan” atau “batal”. Bailes mengambil bagian dalam analisis alarm LGC baru-baru ini, di mana diputuskan untuk melanjutkan misi dengan kesalahan 1202, jika hal itu tidak terjadi terlalu sering dan lintasan tidak menyimpang dari yang dihitung. Dia didukung oleh Jack Garman dari NASA dan Russ Larson dari MIT di ruang belakang. Garman berkata "lanjutkan," dan pemberi sinyal Charlie Duke menyampaikan kata-katanya kepada awak kapal. Di MIT, ketika kami menyadari bahwa sesuatu yang misterius menyia-nyiakan waktu komputer, kami duduk dengan napas tertahan.Setengah menit berlalu antara kemunculan sinyal kesalahan dan jawaban "lanjutkan" dari Houston. Selama waktu ini, pusat kontrol penerbangan memeriksa nilai DELTAH, dan Aldrin memutar "57", kode yang memungkinkan sistem navigasi untuk menerima data radar. Kemudian dia mencoba mengetik "kata kerja 16, kata benda 68" lagi dan melihat bagaimana DELTAH menurun hingga 900 kaki. Sinyal kesalahan menyala lagi. Sekali lagi bersinar "kata kerja 5 kata benda 9-1202". Lagi dari Bumi mereka menjawab "lanjutkan."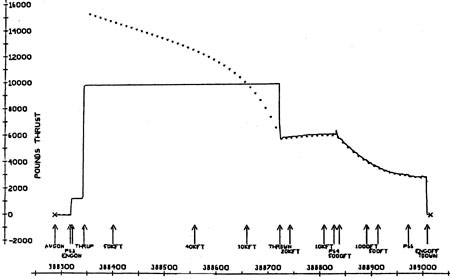 Fig. 6. Traksi yang diharapkan (titik) dan nyata (garis solid) selama pendaratan (data simulasi)Waktu penerbangan 102: 39: 31, semuanya berjalan dengan baik - katup throttle tertutup, tepat pada waktunya. "Aha! Throttle ditutup, lebih baik daripada di simulator, ”komentar Audrin. "Throttle itu tutup tepat waktu!" Seru Armstrong, dengan kegembiraan yang jelas. Dalam transkrip resmi percakapan antara pesawat ruang angkasa dan Bumi selama fase pendaratan, hanya ada satu titik seru - di tempat ini [11].Nosel mesin pendaratan mengalami erosi parah ketika beroperasi dalam mode dari 65% ke daya dorong maksimum. Katup throttle ditutup ketika dorongan yang diperlukan untuk pendaratan dikurangi ke tingkat di mana pengembalian ke nilai maksimum tidak lagi diperlukan sampai akhir fase pengereman. Menutup throttle dengan sangat baik menunjukkan bahwa sistem kontrol berfungsi dengan benar. Juga benar bahwa jika rana macet di posisi terbuka, maka akan diperlukan untuk mengganggu misi, karena setelah 40 detik, sesuai dengan persamaan navigasi, kapal harus berbelok.Sementara modul bulan diarahkan maju ke permukaan bulan, Armstrong menghitung landmark yang menunjukkan bahwa modul telah menurun lebih dari yang dibutuhkan. Dia menemukan bahwa komputer tidak tahu bahwa modul pendaratan telah menurun terlalu banyak [12]. Jika tidak, mesin akan tetap berada pada daya dorong maksimum lebih lama dari apa yang sebenarnya terjadi.
Fig. 6. Traksi yang diharapkan (titik) dan nyata (garis solid) selama pendaratan (data simulasi)Waktu penerbangan 102: 39: 31, semuanya berjalan dengan baik - katup throttle tertutup, tepat pada waktunya. "Aha! Throttle ditutup, lebih baik daripada di simulator, ”komentar Audrin. "Throttle itu tutup tepat waktu!" Seru Armstrong, dengan kegembiraan yang jelas. Dalam transkrip resmi percakapan antara pesawat ruang angkasa dan Bumi selama fase pendaratan, hanya ada satu titik seru - di tempat ini [11].Nosel mesin pendaratan mengalami erosi parah ketika beroperasi dalam mode dari 65% ke daya dorong maksimum. Katup throttle ditutup ketika dorongan yang diperlukan untuk pendaratan dikurangi ke tingkat di mana pengembalian ke nilai maksimum tidak lagi diperlukan sampai akhir fase pengereman. Menutup throttle dengan sangat baik menunjukkan bahwa sistem kontrol berfungsi dengan benar. Juga benar bahwa jika rana macet di posisi terbuka, maka akan diperlukan untuk mengganggu misi, karena setelah 40 detik, sesuai dengan persamaan navigasi, kapal harus berbelok.Sementara modul bulan diarahkan maju ke permukaan bulan, Armstrong menghitung landmark yang menunjukkan bahwa modul telah menurun lebih dari yang dibutuhkan. Dia menemukan bahwa komputer tidak tahu bahwa modul pendaratan telah menurun terlalu banyak [12]. Jika tidak, mesin akan tetap berada pada daya dorong maksimum lebih lama dari apa yang sebenarnya terjadi. Simulator modul bulan.Waktu misi 102: 41: 32, kapal melewati tanda 7400 kaki, turun dengan kecepatan 125 kaki / s, "gerbang tinggi" tercapai. Sistem navigasi sekarang harus melakukan tugas-tugas lain. Modul bulan diarahkan ke depan, sehingga permukaan bulan terlihat sepanjang kursus. Pada DSKY, register mode menunjukkan 64, yang berarti "fase visibilitas", dan "kata benda 64" berubah menjadi "kata benda 63". Alih-alih kecepatan, dua angka dua digit sekarang ditampilkan dalam huruf besar. Salah satunya adalah penunjukan titik pendaratan (LPD), sudut yang menunjukkan tanda yang menandai pada jendela Armstrong harus melihat untuk melihat di mana kapal akan mendarat jika pendaratan otomatis diperbolehkan. Sistem panduan mengendalikan yaw untuk menjaga lokasi pendaratan di sepanjang garis pandang.Awak dapat mengubah situs pendaratan menggunakan pengontrol tangan. (Armstrong mengatakan sebelum penerbangan bahwa ia berencana untuk tidak menggunakan kesempatan ini, tetapi tampaknya “fase visibilitas” bertahan terlalu lama). Angka kedua menunjukkan waktu yang tersisa selama situs pendaratan dapat diubah. Pada fase ini, disertakan sebuah algoritma yang memungkinkan Anda untuk mengubah situs pendaratan, itu adalah periode pendaratan yang paling menegangkan.Waktu misi 102: 42: 17, kesalahan 1201 terjadi. Sekali lagi, kesalahan Eksekutif ( perangkat lunak sistem komputer terdiri dari dua subsistem: Eksekutif - OS waktu nyata dan The Interpreter - mesin virtual, pada kenyataannya, penerjemah perintah untuk bekerja dengan angka presisi ganda. ) - tidak ada memori bebas. Setelah sekitar 24 detik, galat 1202 lagi. Pusat kontrol Houston mengatakan "lanjutkan" dalam kedua kasus. Neil Armstrong, yang jantungnya melakukan 120 hingga 150 detak selama periode waktu ini [13], mematuhi instruksi ini.
Simulator modul bulan.Waktu misi 102: 41: 32, kapal melewati tanda 7400 kaki, turun dengan kecepatan 125 kaki / s, "gerbang tinggi" tercapai. Sistem navigasi sekarang harus melakukan tugas-tugas lain. Modul bulan diarahkan ke depan, sehingga permukaan bulan terlihat sepanjang kursus. Pada DSKY, register mode menunjukkan 64, yang berarti "fase visibilitas", dan "kata benda 64" berubah menjadi "kata benda 63". Alih-alih kecepatan, dua angka dua digit sekarang ditampilkan dalam huruf besar. Salah satunya adalah penunjukan titik pendaratan (LPD), sudut yang menunjukkan tanda yang menandai pada jendela Armstrong harus melihat untuk melihat di mana kapal akan mendarat jika pendaratan otomatis diperbolehkan. Sistem panduan mengendalikan yaw untuk menjaga lokasi pendaratan di sepanjang garis pandang.Awak dapat mengubah situs pendaratan menggunakan pengontrol tangan. (Armstrong mengatakan sebelum penerbangan bahwa ia berencana untuk tidak menggunakan kesempatan ini, tetapi tampaknya “fase visibilitas” bertahan terlalu lama). Angka kedua menunjukkan waktu yang tersisa selama situs pendaratan dapat diubah. Pada fase ini, disertakan sebuah algoritma yang memungkinkan Anda untuk mengubah situs pendaratan, itu adalah periode pendaratan yang paling menegangkan.Waktu misi 102: 42: 17, kesalahan 1201 terjadi. Sekali lagi, kesalahan Eksekutif ( perangkat lunak sistem komputer terdiri dari dua subsistem: Eksekutif - OS waktu nyata dan The Interpreter - mesin virtual, pada kenyataannya, penerjemah perintah untuk bekerja dengan angka presisi ganda. ) - tidak ada memori bebas. Setelah sekitar 24 detik, galat 1202 lagi. Pusat kontrol Houston mengatakan "lanjutkan" dalam kedua kasus. Neil Armstrong, yang jantungnya melakukan 120 hingga 150 detak selama periode waktu ini [13], mematuhi instruksi ini., , .. 64 , LPD. , , , . , , , . , , , .
Namun, Armstrong berhasil memperhatikan bahwa sistem LPD menunjukkan bahwa "kami mendarat di dekat kawah berbatu besar dengan batu yang sangat besar menutupi sebagian besar permukaan" [15]. Oleh karena itu, pada waktu 102: 43: 08 dari awal misi (ketinggian 650 kaki) Armstrong, memutuskan bahwa dia tidak bisa duduk dekat dengan kawah, beralih mode beralih autopilot dari AUTO ke ATT HOLD untuk secara manual mengontrol posisi modul bulan. Dia bermanuver dengan sudut nol untuk mempertahankan kecepatan horizontal dan melewati medan berbatu.(ATT HOLD berarti bahwa autopilot digital mengendalikan kecepatan penerbangan dalam mode Attitude-Hold, di mana astronot dapat mengendalikan kecepatan penerbangan dengan membelokkan joystick. Setelah pegangan joystick dilepaskan, autopilot nol kecepatan untuk mempertahankan posisi saat ini.)Waktu misi 102: 43:20, ketinggian 430 kaki, Armstrong mengalihkan sakelar sakelar ke mode kontrol kecepatan turun dengan tangan kirinya (P66). Komputer sekarang mengendalikan daya dorong kapal untuk mempertahankan kecepatan turun yang dikendalikan oleh sakelar ROD. Menggerakkan sakelar ke atas melambatkan satu kaki per detik; gerakan ke bawah meningkatkan kecepatan keturunan dengan jumlah yang sama. Menggunakan joystick, Armstrong memiringkan modul ke kecepatan horizontal nol dan mengirim modul ke tempat yang aman untuk mendarat. Setelah beberapa kali, gerakan kontrol "mungkin tidak disengaja" karena fakta bahwa debu yang ditimbulkan oleh knalpot mesin mengubah persepsi kecepatannya, Armstrong mendaratkan pesawat ruang angkasa di Sea of Tranquility di 102: 45: 40.