Untuk membuat penangkapan robot lebih dapat diandalkan, para peneliti sedang mengembangkan objek yang serumit mungkin untuk dimanipulasi.
 Terinspirasi oleh konsep gambar kompetitif, peneliti dari University of California di Berkeley mempelajari objek kompetitif fisik yang dirancang dengan cermat agar sulit ditangkap dengan genggaman robot standar.
Terinspirasi oleh konsep gambar kompetitif, peneliti dari University of California di Berkeley mempelajari objek kompetitif fisik yang dirancang dengan cermat agar sulit ditangkap dengan genggaman robot standar.Baru-baru ini, sejumlah besar penelitian telah muncul pada topik "gambar kompetitif", yang merupakan gambar objek yang dimodifikasi sehingga sangat sulit bagi algoritma penglihatan komputer untuk mengenalinya. Idenya adalah untuk menggunakan gambar-gambar ini untuk mengembangkan algoritma visi komputer yang lebih kuat, karena sifat "permusuhan" mereka adalah opsi "kasus terburuk" yang diterapkan secara khusus - dan jika algoritme Anda dapat menangani gambar permusuhan, maka mungkin akan menangani sebagian besar tugas lain.
Para peneliti dari Laboratorium untuk Otomasi dan Teknik (
AUTOLAB ) di University of California di Berkeley, yang dipimpin oleh Profesor Ken Goldberg, telah memperluas konsep ini ke genggaman robot. Mereka secara khusus merancang objek kompetitif fisik sehingga sulit diangkat dengan lengan robot konvensional. Hanya perlu sedikit mengoreksi angka tiga dimensi yang biasa, dan pegangan dua jari standar akan menghadapi semua jenis kesulitan, mencoba untuk memahami objek dengan benar.
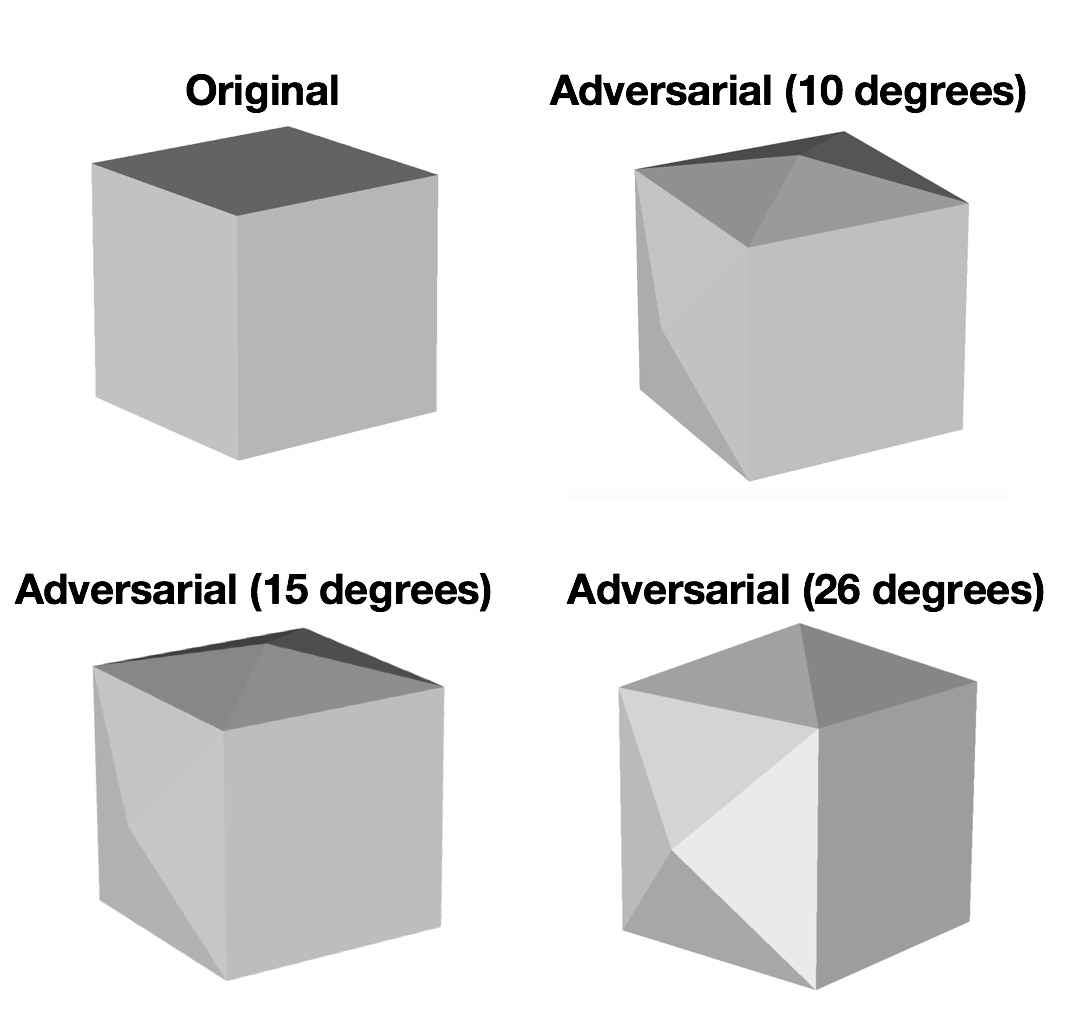 Dimulai dengan kubus, objek permusuhan berevolusi, menjadi semakin sulit untuk ditangkap dengan genggaman dua jari - ketika benda itu mencoba meremas permukaan sudut, objek itu berputar dan terlepas.
Dimulai dengan kubus, objek permusuhan berevolusi, menjadi semakin sulit untuk ditangkap dengan genggaman dua jari - ketika benda itu mencoba meremas permukaan sudut, objek itu berputar dan terlepas.Fitur utama dari objek-objek kompetitif ini adalah bahwa mereka terlihat seperti mudah ditangkap, tetapi dengan setidaknya penjepit dua jari, ternyata menjadi sulit. Perbedaan antara bagaimana objek terlihat dan geometri aslinya tidak signifikan: dalam satu contoh, ini adalah sebuah kubus dengan piramida rendah pada tiga dari enam sisi - yang terkecil dari mereka memiliki sudut kemiringan tepi hanya 10 derajat. Dan di seberang setiap piramida ada wajah datar biasa, oleh karena itu, kubus tidak memiliki wajah datar yang berlawanan. Karena itu, genggaman dua jari yang bekerja pada penjepit objek mengalami masalah, karena jika Anda mencoba menjepit permukaan pada sudut, gaya tekan akan menyebabkan objek berputar, dan sering jatuh dari penjepit.
 Penangkapan paralel dengan kontak titik berhasil menangkap kubus reguler (kiri) dan tidak dapat mengatasi kubus kompetitif yang dikembangkan oleh peneliti (kanan)
Penangkapan paralel dengan kontak titik berhasil menangkap kubus reguler (kiri) dan tidak dapat mengatasi kubus kompetitif yang dikembangkan oleh peneliti (kanan)Perencana pengambilan sering mencari permukaan yang berlawanan halus yang dapat dijepit, dan karena perbedaan antara kubus kompetitif dan kubus biasa cukup kecil untuk dilewatkan oleh sensor 3D, sebagian besar sistem robot akan berpikir, “Oh, lihat, ini kubus, sangat mudah ! " Dan kemudian mereka pasti akan gagal tugas ketika kubus keluar dan terlepas dari cengkeraman mereka.
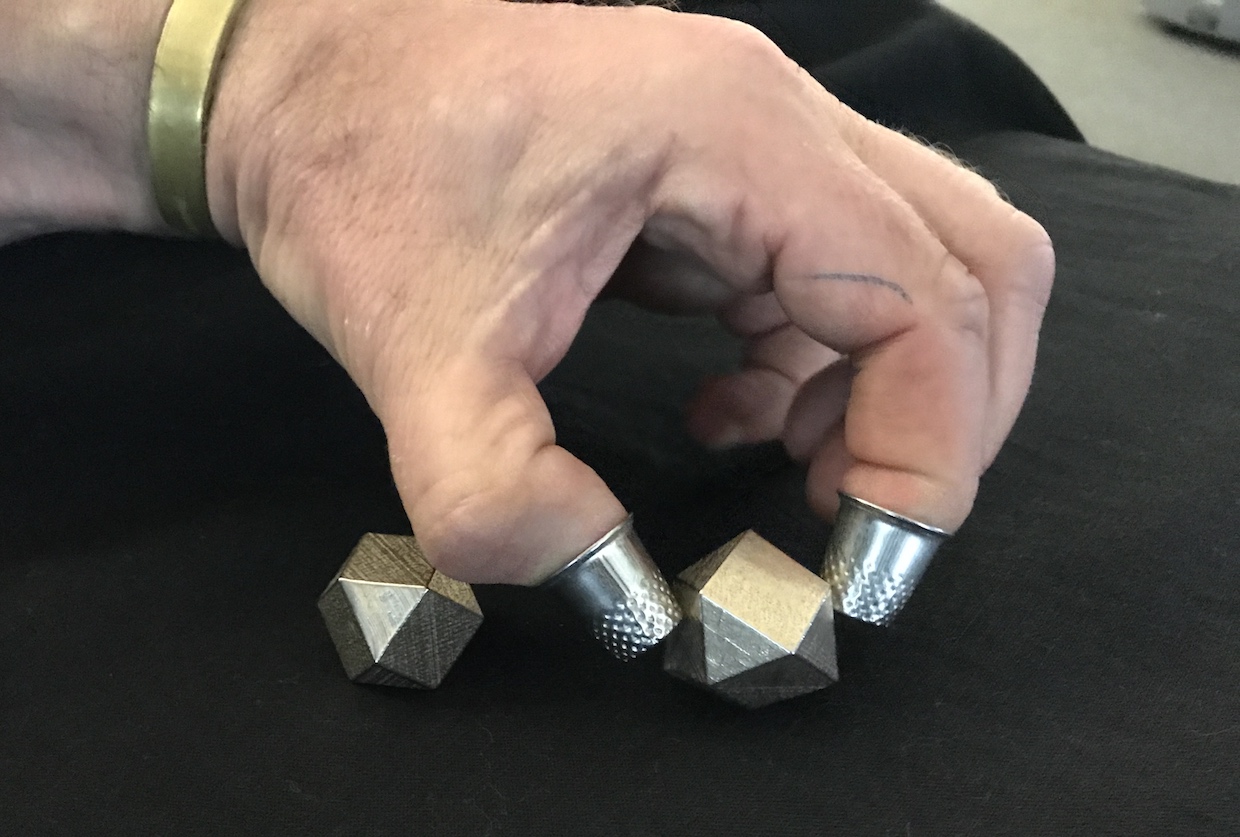 Bentuk permusuhan juga bekerja pada manusia - memakai bidal yang meniru baja robot yang dingin dan tidak sensitif, dan menggunakan dua jari untuk menjepit objek, para peneliti mengkonfirmasi bahwa sulit untuk mengangkat benda-benda ini.
Bentuk permusuhan juga bekerja pada manusia - memakai bidal yang meniru baja robot yang dingin dan tidak sensitif, dan menggunakan dua jari untuk menjepit objek, para peneliti mengkonfirmasi bahwa sulit untuk mengangkat benda-benda ini.Dengan meningkatnya kompleksitas formulir, menjadi semakin sulit untuk mengembangkan versi kompetitif. Mengambil cuboctahedron (polyhedron dengan delapan wajah segitiga dan enam persegi), para peneliti secara acak mengubah simpul-simpul gambar (dalam simulasi) sampai mereka mendapatkan bentuk yang tidak memiliki wajah yang berseberangan secara langsung. Dan untuk bentuk yang lebih kompleks, seperti memotong silinder, contoh kompetitif diperoleh dengan menggunakan algoritma pembelajaran yang mendalam.
 Untuk bentuk yang lebih kompleks, seperti memotong silinder, contoh kompetitif diperoleh dengan menggunakan algoritma pembelajaran yang mendalam
Untuk bentuk yang lebih kompleks, seperti memotong silinder, contoh kompetitif diperoleh dengan menggunakan algoritma pembelajaran yang mendalamDalam
tes pendahuluan di dunia nyata, penangkapan titik paralel berusaha mengangkat beberapa objek kontroversial ini. Dalam setiap kasus, taksiran probabilitas menangkap objek adalah 100% (berdasarkan kebijakan
Dex-Net yang diuji dalam simulasi), tetapi ternyata ternyata penangkapan yang berhasil dari kubus dan cuboctahedra yang kompetitif hanya berhasil di 13% kasus.
Para peneliti mengatakan mereka berencana untuk menguji benda-benda ini dengan berbagai jenis genggaman, serta dengan genggaman vakum, untuk melihat apakah mereka dapat membuat objek yang paling kompetitif dari semuanya. Dan ingat bahwa tujuan dari semua ini bukan hanya untuk mengelabui algoritma penangkapan yang disayangkan, tetapi untuk mengembangkan alat yang akan membantu membuat penangkapan robot bekerja cukup (mudah-mudahan) dapat diandalkan untuk dunia nyata.