Saya ingin berbicara tentang versi kedua Mesin Marmer elektro-mekanis saya dan proses desainnya. Tentang mobil spiral pertama yang
sudah saya tulis di sini di hub Sejak itu, tidak sedikit waktu telah berlalu, dan sekarang, pada prinsipnya, rencana telah dilaksanakan: dua lift dan dua keturunan bekerja bersama sebagai satu sistem, mentransfer bola satu sama lain dengan mencampurkannya dalam urutan acak. Jujur, saya tidak suka semuanya di sini, beberapa hal memerlukan pengerjaan ulang atau penyetelan yang lebih halus, tapi saya senang bahwa secara umum saya melakukannya. Hasilnya di video!
Saya bekerja sebagai programmer. Ketika pemrograman, sering terjadi bahwa Anda menulis dan men-debug kode selama seminggu, tetapi kemudian, memikirkan kembali, Anda cukup menghapus semua yang dibuat oleh terlalu banyak pekerjaan dalam seminggu, dan Anda menulis lagi dalam dua jam sudah bersih, bekerja dan disisir. Ketika mengembangkan Mesin Marmer saya, saya menemukan fakta bahwa di sini, di dunia fisik, prinsip ini tidak berhasil. Ini berfungsi, tapi lemah ... atau saya belum mengerti bagaimana membuatnya bekerja dengan cara ini.
Ada sejumlah masalah.
Masalah pertama mungkin adalah kualifikasi saya yang tidak cukup tinggi sebagai perancang mesin marmer; Saya pikir ini adalah kelemahan sementara, mungkin saya masih bisa memompa keterampilan saya. Saya menggunakan lingkungan desain KOMPAS-3D. Sebenarnya, menguasai alat ini tidaklah mudah. Mungkin sekarang saya dapat menggunakan sekitar 2-3% dari kemampuan COMPASS. Saya harus membaca kembali banyak instruksi dan merevisi banyak video demo di youtube. Saat ini, saya telah belajar mendesain bagian-bagian individual, tetapi saya masih belum tahu bagaimana menggabungkannya dalam desain tunggal dalam model 3D untuk memastikan bahwa bagian-bagian yang berputar berinteraksi dengan benar, tidak saling menempel di mana tidak perlu, bahwa gerakan mereka cukup. Lalu, saya tidak benar-benar membayangkan jika dalam editor 3D modern dimungkinkan untuk mensimulasikan pergerakan komponen gratis, misalnya, pergerakan bola pada bidang miring, memodelkan tempat di mana bola jatuh dan sebagainya. Secara umum, ada sesuatu yang harus saya pelajari.
Saya dapat memberikan contoh seperti itu tentang KOMPAS latihan mandiri saya. Bahkan ketika saya sedang mendesain Mesin Marmer spiral pertama, saya menghadapi masalah bahwa saya tidak tahu bagaimana membuat beberapa pesawat dengan sedikit miring. Sangat mudah untuk merancang bagian-bagian di mana bidang utama adalah orthogonal. Tetapi bagaimana jika saya membutuhkan ular yang turun? Saya kemudian datang dengan dan menggunakan trik aneh ini (tidak ada yang lebih baik dari yang saya pikirkan):

Saya menggambar profil keturunan di pesawat, lalu memerasnya:
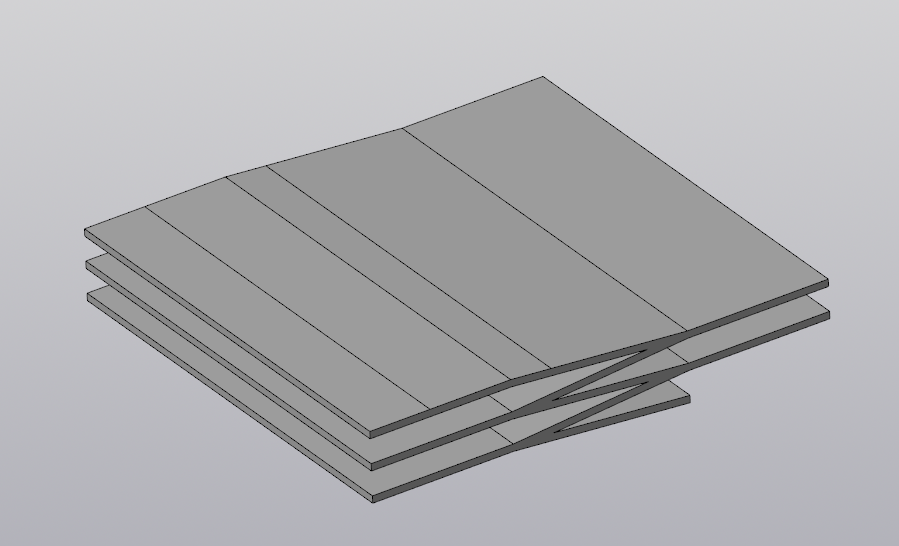
Lalu ia memotong semua yang tidak perlu dengan memproyeksikan sketsa dari atas:
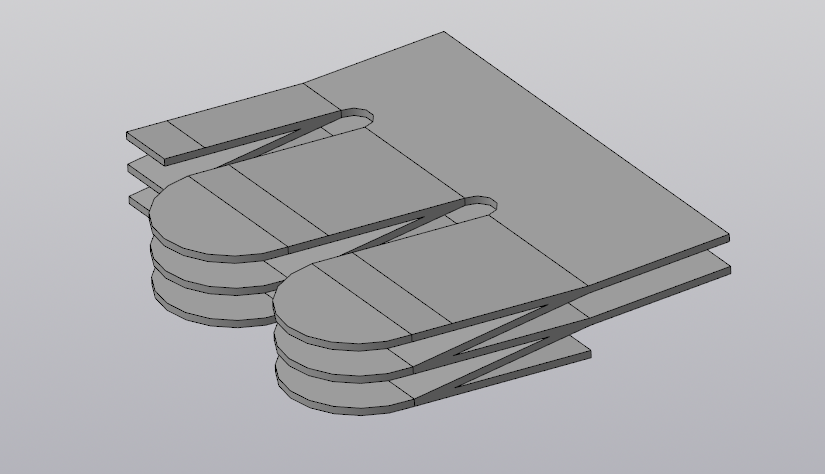
Sekarang saya sudah mengerti betapa sulit dan bodohnya menggunakan teknik seperti itu. Akan jauh lebih mudah untuk menggunakan pesawat kompas offset, tapi kemudian saya tidak bisa melakukannya ... Sekarang saya akan membuat detail sedemikian jauh lebih mudah.
Masalah kedua sebagian terkait dengan masalah pertama - ini adalah waktu pencetakan. Printer 3D dengan pencetakan berlapis butuh waktu cukup lama. Ternyata jika saya belum tahu bagaimana memodelkan interaksi bagian-bagian dalam perangkat lunak, maka untuk memeriksa operabilitas node Anda perlu menghabiskan banyak waktu dan plastik. Itu terjadi pada saya bahwa saya mendesain dua bagian, kemudian mencetak, tetapi mereka tidak cocok satu sama lain dan saya perlu mengubah sesuatu dalam model. Dan ini lagi-lagi buang-buang waktu dan plastik. Tapi plastik sama sekali tidak mahal, tidak terlalu sayang, tapi waktu ... ya, sayang sekali.
Masalah ketiga adalah kurangnya pengalaman. Banyak kesalahan yang saya buat berasal dari kenaifan dan kurang pengalaman. Mesin Marmer adalah mesin robot dengan status tak terhitung ketika Anda menghitung lokasi semua bola sebagai status terpisah. Mesin ini memiliki banyak bagian mekanik yang bergerak. Saat mendesain crane, saya berharap bisa menghubungkan bagian plastik yang bergerak melalui lubang di dalamnya hanya dengan sekrup / stud dan mur di ring. Tetapi ternyata ini tidak berhasil. Lubang-lubang yang dirancang pada bagian plastik setelah pencetakan terlalu kecil, terlalu besar, atau dengan cepat menjadi longgar selama operasi. Kacang, bahkan melalui ring, selalu dilonggarkan. Kacang yang dikunci sendiri dengan cincin nilon meningkatkan situasi, tetapi permainan masih tidak dapat diterima. Jangan kencangkan mur - itu akan menggantung, dan kencangkan - akan ada banyak gesekan, motor tidak akan menarik. Saya menguji semua ini pada diri saya sendiri sampai saya menyadari apa yang perlu dilakukan seakurat mungkin, yaitu: di mana saja bantalan harus ditempatkan pada bagian yang bergerak. Solusi sederhana seperti itu, yang menghilangkan serangan balik dan mobilitas luar biasa, gesekan minimal, dan tidak ada yang terlepas secara spontan. Saya harus mengulang banyak model untuk menggunakan bantalan. Misalnya, berikut adalah model dua bagian batang penghubung untuk motor stepper:
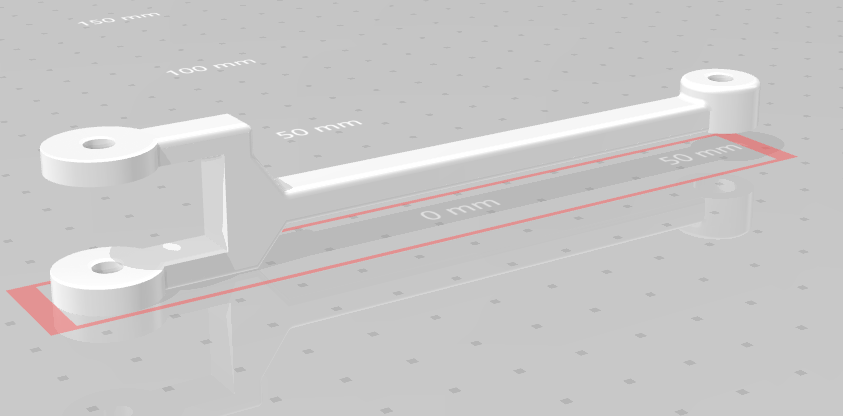
dan di sini:

Sekarang mereka terhubung melalui bantalan. Saya mendesain alur dari kursi bantalan sehingga memungkinkan untuk memasukkan bantalan dengan kuat ke dalam lubang gangguan dan bahkan ada kemungkinan untuk mengencangkannya dengan sekrup.
Foto-foto ini menunjukkan tempat di mana bantalan sekarang berdiri:

dan lainnya:

Lalu, masalah selanjutnya adalah kekakuan struktur. Seperti yang Anda lihat, saya mencoba membuat semacam objek seni robot mekanik, dan kombinasi logam putih, hitam, dan mengkilap itu tidak disengaja. Di batang derek, saya ingin memasang stud logam M4. Dia harus memberi bar kekuatan yang diperlukan dan seharusnya bersinar "dalam sorotan lampu sorot" (jika saya memilikinya). Namun, itu tidak berhasil. Dengan stud logam, berat dan kelembaman batang meningkat secara signifikan. Motor stepper saya yang buruk hampir tidak menarik palang seperti itu, tetapi ia hampir jatuh. Saya harus mengambil langkah-langkah ekstrem di sini: Saya mencetak pada pin putih plastik (PLA putih) printer saya dengan diameter 4 milimeter, yang saya lekatkan di dalam bar tempat saya ingin meletakkan pin logam. Ternyata dengan baik. Tidak terlalu tangguh, tetapi konstruksinya sangat ringan. Gagasan kedua yang datang kepada saya kemudian - crane harus dengan penyeimbang! Dan mengapa saya tidak segera memikirkannya? Inilah pertanyaannya: ulang model dan ketik ulang seluruh bar atau cetak tambahan kecil ke bar yang ada dan "bekerja dengan file"? Saya memilih yang kedua, jadi lebih cepat - saya membuat bagian terpisah yang akan berisi tempat untuk bantalan dan kotak di bawah beban - penyeimbang:
Saya memotong ekor dari batang dan menempel bagian baru ke yang lama menggunakan dikloroetana.

Di sini foto menunjukkan tempat menempel. Meski ... tidak semuanya jelas di sini, karena bagaimana menyeimbangkan keran? Dia memiliki bobot yang bervariasi ketika menjatuhkan bola ... Saya harus mengatakan bahwa saya masih meremehkan berat bola logam itu sendiri. Meskipun mereka tidak besar, 12,5 mm, tetapi masing-masing memiliki berat 8 gram, tetapi bertindak pada bahu yang lebar. Ketika crane mengangkat tiga bola sekaligus, dan kemudian melemparkannya di posisi atas, getaran elastis terjadi pada batang. Dan bagaimana saya akan memperhitungkannya terlebih dahulu? Saya tidak bisa membayangkan. Apakah mungkin menghitung entah dalam COMPASS atau CAD lainnya?
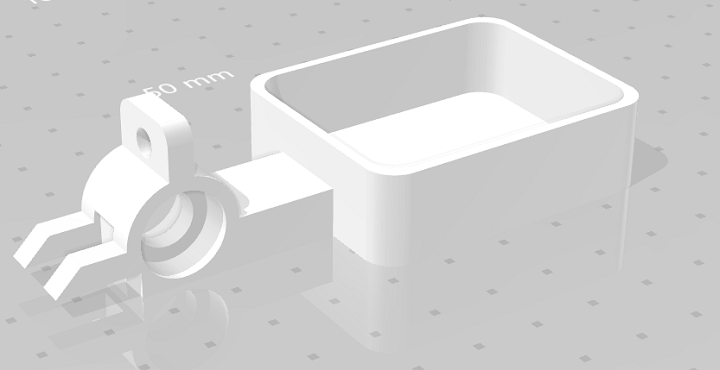
Secara umum, ketika mengembangkan Mesin Marmer ini, saya dihadapkan dengan kenyataan bahwa banyak hal tidak berfungsi seperti yang saya bayangkan. Misalnya, yang paling sederhana adalah corong untuk mengumpulkan bola. Di sini saya membuat rendering 3D dari bagian ini:

Tampaknya apa yang salah di sini? Tetapi pada kenyataannya, bahkan corong ini bekerja secara berbeda, tidak seperti yang saya pikirkan! Saya membuat bagian bawah sebagai bagian dari permukaan bola dan berpikir bahwa bola akan menggulung sepanjang mangkuk dan kecepatan mereka akan meningkat ketika mereka pindah ke outlet. Tapi tidak! Ternyata bola menggelinding dan menuruni bukit, kecuraman permukaan lebih sedikit, mereka melambat saat mendekati pintu keluar. Mungkin peran langkah 0,2 mm adalah ketebalan lapisan cetak? Sesuatu tidak seperti yang saya inginkan atau pikirkan. Tapi setidaknya dia tidak merombak tempat ini.
Masalah penting lainnya adalah bagaimana cara menghubungkan dua mesin marmer menjadi satu? Saya sudah memiliki mesin spiral dan berfungsi, bisakah dibiarkan apa adanya? Untuk menyetujui tingkat aliran bola dari mesin spiral pertama, saya harus membongkar seluruhnya, mendesainnya dalam COMPASS dan mencetak dudukan untuk rak spiral untuk membuatnya lebih tinggi dan memasang kembali mesin. Maka itu perlu untuk datang dengan sakelar aliran, pemicu, perangkap di bawah pemicu, trek dan belokan. Secara umum, proses pembuatannya cukup menarik. Saya punya teman, dan istrinya adalah seorang seniman, dan saya ingat menggambar dengan ikan untuk waktu yang lama. Saya datang untuk mengunjungi mereka, saya melihat, ikan normal. Setelah seminggu saya datang - dan ikan-ikan dalam gambar yang sama sudah berenang ke arah lain. Jadi saya punya sesuatu seperti itu juga. Hari ini saya membuat dan melakukannya, tetapi besok saya memikirkan kembali dan mendesain ulang semuanya, mencetak model lain, memasangnya, mengujinya.
Selanjutnya, saya akan memberi tahu Anda detail apa yang dirancang. Di bawah ini adalah render 3D dari model ini. Derek berdiri:

Di rak, lubang pembuka di bawah kartu driver mesin disediakan.
Saya pasang bagian kedua ke dudukan crane: dudukan motor stepper:
Ada juga masalah yang tidak terduga - dudukannya terlalu tahan lama dan terlalu tebal. Sekarang mesin mengalami masalah dengan pendinginan. Anda mungkin harus mendesain ulang situs ini.
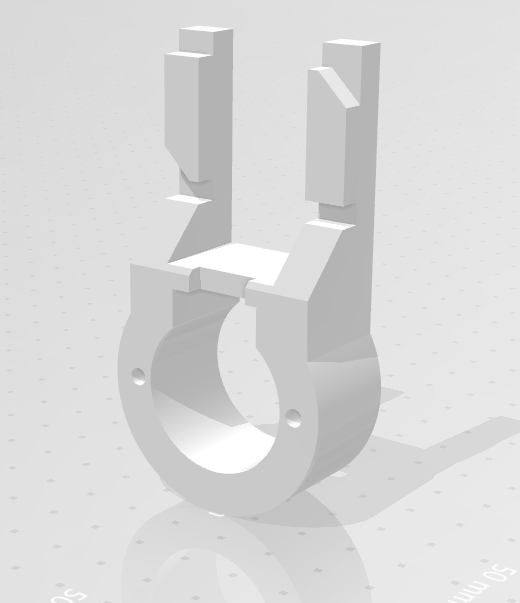
Pada rak dari atas, bagian "segitiga" diikat dengan sekrup dengan kursi bantalan untuk menopang batang derek:

Dua bagian dari batang derek:
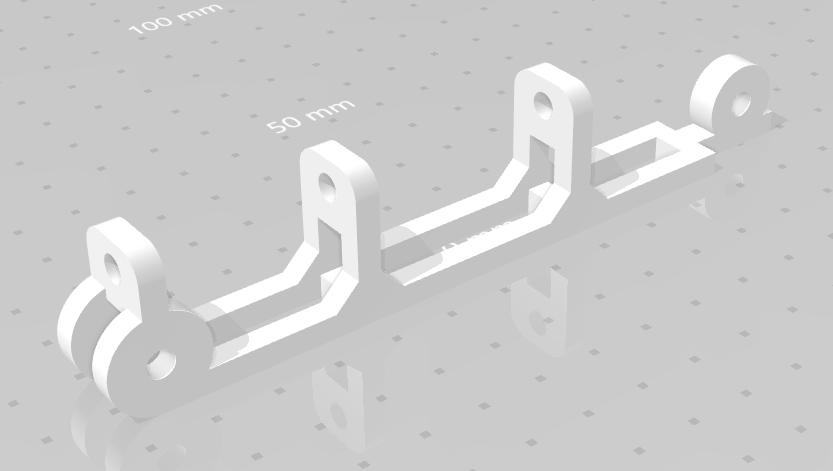
dan di sini:

Salah satu bagian terpenting adalah pemicu pemicu:
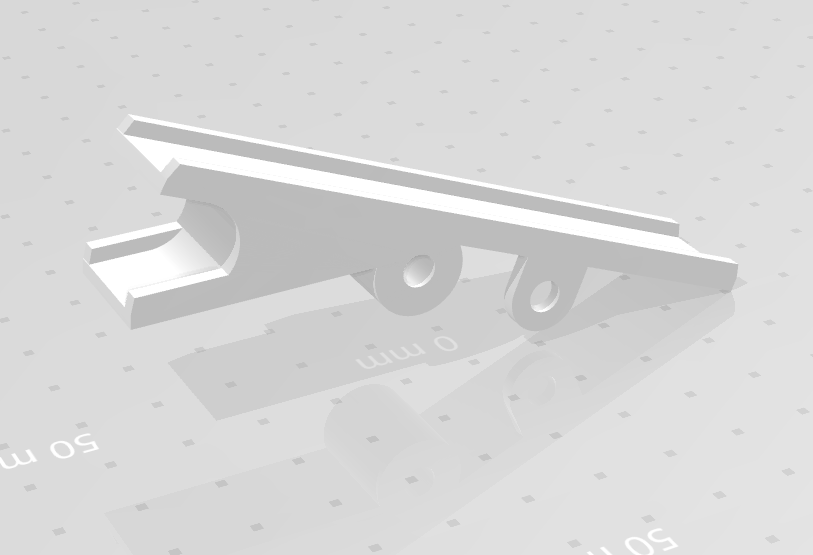
dan mangkuk lain untuk menangkap bola dari pelatuk:

Ada banyak detail kecil lainnya yang satu atau lain cara harus diciptakan, dirancang dan dicetak saat bepergian.
Sejujurnya, setelah merakit semua mekanik, ketika saya beralih ke listrik dan ke bagian perangkat lunak proyek, saya bahkan menarik napas lega, di sana semuanya sederhana!

Untuk memprogram papan FPGA dari Mars rover 3bis, mulai dua motor stepper, hubungkan solenoid crane dan atur jajak pendapat dari saklar buluh, bagi saya tampaknya tugas yang jauh lebih sederhana daripada desain dan implementasi mekanika robot Mesin Marmer. Tapi pemrograman FPGA, itu cerita lain, jika ada yang tertarik, Anda bisa
baca di sini .
Sekarang saya sudah berpikir untuk mendesain jenis lift berikut untuk versi selanjutnya dari Marble Machine v3. Ada beberapa opsi di sini: Sekrup Archimedes, kerekan langkah, roda gigi. Ada sesuatu untuk dipikirkan dan ada yang bisa menghancurkan kepalanya.