Selamat siang Seperti yang Anda ketahui, jalan di Rusia jauh dari yang terbaik, dan oleh karena itu, pengembangan dan pemrograman blok suspensi aktif untuk mobil yang beradaptasi dengan jenis permukaan jalan dengan memilih mode operasi atau algoritma masih relevan.
Saya akan memberikan sejumlah diagram dan rekomendasi listrik.
Pertama, Anda perlu memutuskan jenis mikroprosesor - mikrokontroler. Saya menyarankan Anda untuk memilih mikrokontroler STM 32-bit modern atau serupa - pilihan terbaik dari Infineon.

Salah satu faktor terpenting dan kunci keandalan sirkuit adalah desain sumber daya dan harness yang benar. Saya merekomendasikan penggunaan pengontrol LDO multi-channel berbasis mikroprosesor dengan bus SPI serial untuk mengontrol mode daya, shutdown darurat dan pemantauan (Power good).

Selanjutnya, kita lanjutkan ke pengembangan "unit daya". Kami merancang skema kontrol untuk elemen elastis - peredam:
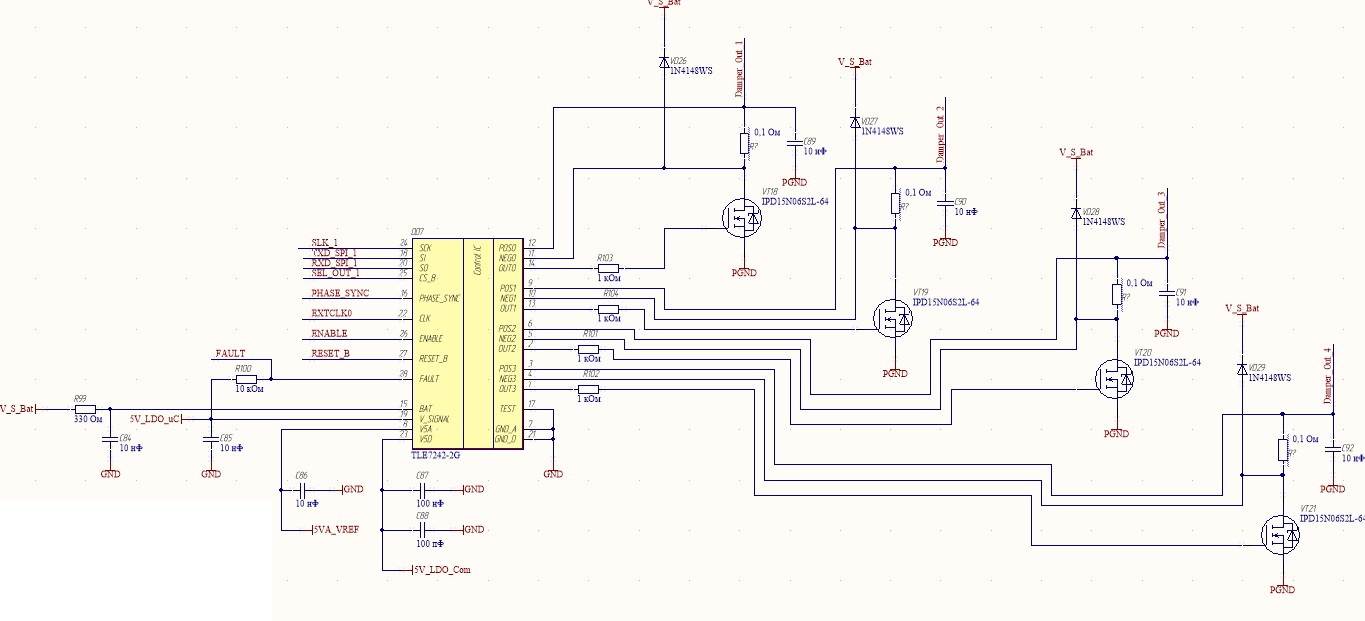
Lebih baik memilih chip khusus bersertifikat untuk industri otomotif, misalnya, TLE7242 Infineon. Ini berisi sirkuit kontrol MOSFET untuk kelebihan beban pada sirkuit keluaran Drain-Source.
Untuk katup kontrol pompa udara, kunci pintar harus digunakan dengan perlindungan bawaan terhadap kenaikan suhu, korsleting, dan tegangan lebih:
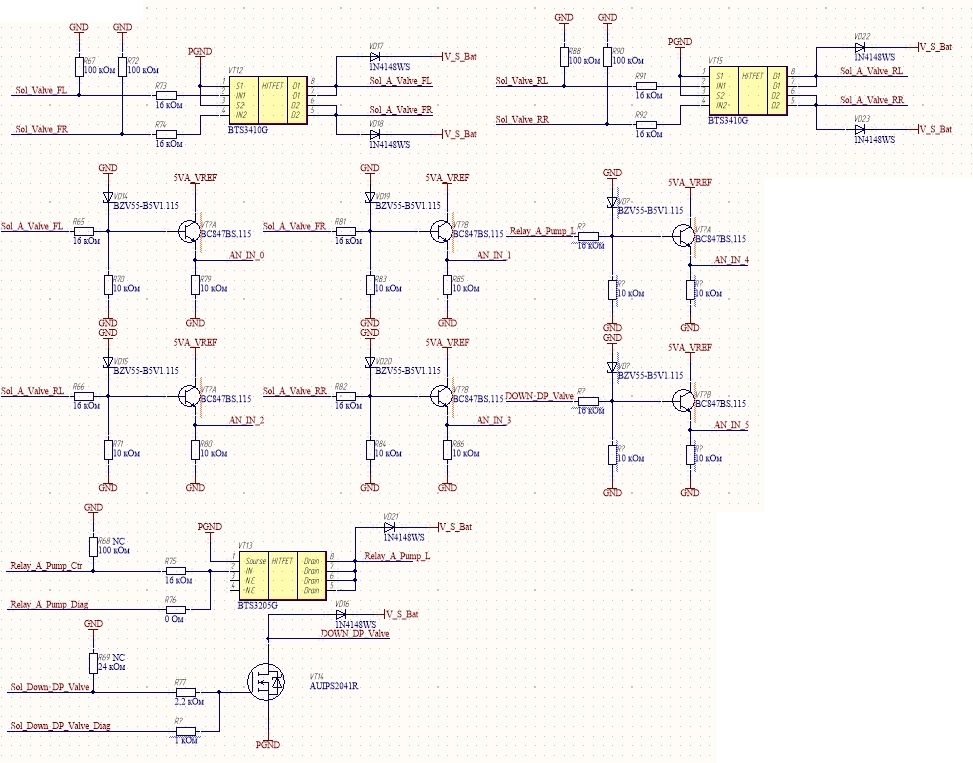
dan katup pompa udara Air_Valve_Pump:

Setelah merancang "unit daya", kami melanjutkan ke pengembangan sirkuit listrik untuk menghubungkan sensor akselerasi. Kami memilih protokol untuk transmisi data serial melalui antarmuka I2C karena kesederhanaan komparatif pemrograman, jalur dua kabel, dan frekuensi transmisi informasi yang rendah. Pastikan untuk membuat perlindungan terhadap tegangan input dari jaringan + 12V dan pembalikan polaritas dengan menariknya ke + 5V, + 12V dan sirkuit daya dioda TVS. Saya menggunakan multiplexer Perangkat Analog untuk perpindahan saluran berurutan:

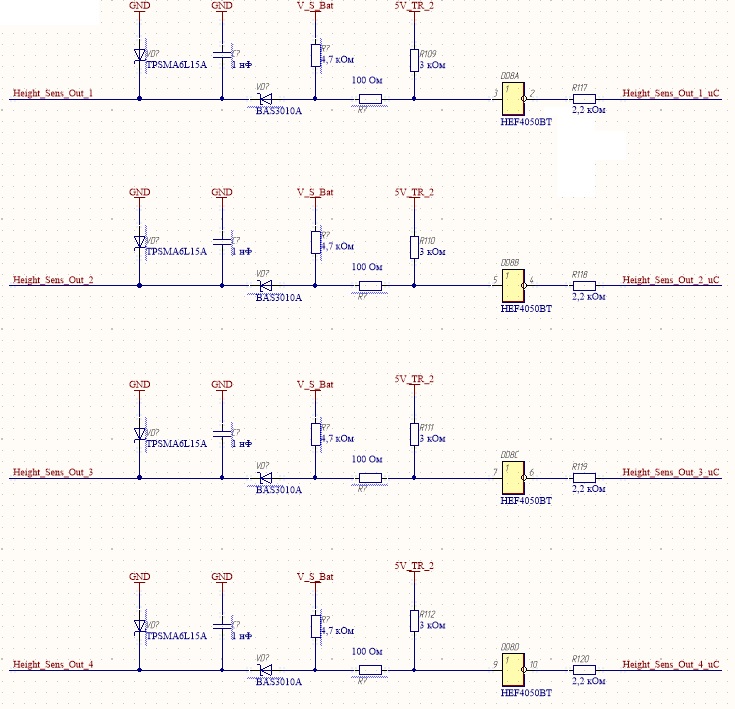
Diagram koneksi sensor ketinggian cukup sederhana, mikrokontroler membaca informasi pada pin I / O pada sisi yang naik:
Untuk mengkonfigurasi dan mengkalibrasi unit, dua transceiver BISA independen digunakan, dibuat pada chip TLE6250 dengan perlindungan ESD bawaan. Untuk melindungi saluran transmisi diferensial, saya juga menginstal penekan PESD2CAN.
Beberapa kata tentang pemrograman blok. Kode sumber ditulis dalam C untuk komunikasi antara node pada level rendah dan protokol komunikasi: SPI, I2C, CAN. Untuk mengontrol blok dari tingkat atas, variabel utama diterjemahkan oleh program MatLab & Simulink melalui kompiler C dan fungsi bawaan dari paket matematika.