
Pendahuluan
Ekskavator dapat dilihat di setiap lokasi konstruksi di kota. Ekskavator biasa ditangani oleh satu pengemudi. Untuk mengelolanya tidak memerlukan sistem otomasi yang kompleks.
Tetapi jika excavator berkali-kali lebih akrab dan mencapai ketinggian bangunan lima lantai, dapatkah Land Cruiser ditempatkan di embernya, dan "pengisian" terdiri dari motor listrik, kabel, dan roda gigi seukuran mobil? Dan apakah dia bekerja di tambang batu bara dan pertambangan, 24 jam sehari / 7 hari seminggu 30-40 tahun berturut-turut?
Ekskavator seperti itu adalah sistem industri, pemeliharaannya sangat mahal.
Otomatisasi proses teknologi mengurangi biaya pengoperasian sistem industri. Sistem kontrol proses otomatis disebut - ACS TP. Ekskavator yang mirip dengan yang dijelaskan tidak terkecuali.
Jadi excavator macam apa ini? Sistem kontrol proses apa yang digunakan?
Apa jenis excavator yang sedang kita bicarakan?
Kita berbicara tentang excavator penambangan. Mesin-mesin ini mengembangkan pertambangan dan penambangan batubara.
Dimensi: excavator penambangan mencapai ketinggian bangunan lima lantai.
Bergerak: Ekskavator bergerak dengan bantuan undercarriage yang dilacak. Troli terdiri dari:
- bingkai yang dilacak;
- ulat
- drive perjalanan;
- sirkuit pelumasan bagian bawah.
Menggali: Menggali excavator menggunakan mekanisme Sekop Langsung untuk menggali. Mekanismenya terdiri dari bucket, stick, dan boom. Ember dipasang pada gagang. Pegangan dirancang untuk memberikan gerakan translasi bucket. Terletak melintang ke boom. Mekanisme tekanan dipasang pada boom, yang melakukan tekanan dan pergerakan balik gagang dengan bucket. Sistem tali yang rumit membuat mekanisme ini bergerak.
 Perangkat (komposisi):
Perangkat (komposisi): excavator terdiri dari tiga node yang diperbesar:
- peralatan kerja;
- platform putar dengan mekanisme;
- menjalankan troli.
Peralatan kerja telah dijelaskan di atas - inilah mekanisme "sekop langsung".
Excavator penambangan melakukan banyak operasi: menggali, memutar badan alat berat, bergerak, dll. Mesin terpisah dirancang untuk setiap operasi. Untuk melakukan semua operasi ini membutuhkan sejumlah besar sistem. Semua sistem dan mekanisme, seperti yang diharapkan, terletak di "ruang komputer".
Ruang mesin excavator adalah meja putar. Ini berisi mekanisme pengangkat bucket, mekanisme putar, peralatan listrik dari excavator dengan sistem kontrol dan pemantauan, mekanisme bantu, sistem pneumatik, sistem pelumasan otomatis terpusat.
Kondisi kerja dan masa pakai: excavator penambangan bekerja 24/7, dan masa pakai benar-benar 30-40 tahun.
Makanan / bahan bakar: shovel tambang ditenagai oleh listrik. Setiap bagian gunung dari bagian tersebut menerima listrik dari gardu induk dengan tegangan 35/6 kV.
Apa otomatisasi excavator di atas kapal?Ekskavator beroda adalah sistem industri. Tugas mengoperasikan excavator mirip dengan mengoperasikan fasilitas industri:
- kontrol parameter sistem pergerakan;
- pemantauan keausan peralatan;
- perlindungan peralatan dari ancaman eksternal dan internal: kelebihan beban, korsleting, dll.
- pengukuran energi;
- kontrol posisi excavator;
- inspeksi peralatan selama operasi;
- kontrol blind spot;
- pemantauan kinerja excavator;
- acara logging;
- transfer data untuk akuntansi terpusat.
Semua tugas ini ditangani oleh satu operator. Ini dimungkinkan melalui otomatisasi.
Sistem kontrol otomatis "di atas kapal" excavator mencakup sistem berikut:
Pengontrol dipasang
untuk memantau parameter gerakan . Operator memantau parameter berikut: pengoperasian sistem kontrol drive, suhu pemanasan komponen sistem, tekanan pada sistem pneumatik, dan pelumas.
Untuk memperhitungkan energi listrik yang dikonsumsi dan diberikan aktif dan reaktif , meter listrik dipasang.
Zona buta, pengoperasian peralatan mekanis dan permukaan kerja ditampilkan di layar operator. Untuk ini, kamera video dipasang.
Untuk menghitung dan memperhitungkan
kinerja excavator , data dari pengontrol digunakan. Indikator dihitung untuk interval waktu tertentu: per shift, per bulan, oleh tim.
Semua peristiwa disimpan dalam log peristiwa dan interval waktu yang diperlukan disimpan.
Bagaimana cara transfer data diorganisasikan?
Seperti disebutkan di atas, excavator terdiri dari troli berjalan dan meja putar.
Meja putar dapat berputar bebas 360 derajat relatif ke undercarriage. Sangat bermasalah untuk menggunakan kabel untuk mentransfer data antara dua bagian ini. Mereka menggiling dengan sangat cepat.
Data antara bagian-bagian excavator ditransmisikan melalui Wi-Fi. Modul fungsi Wi-Fi WLAN 5100
Phoenix Contact dipasang di dasar dan meja putar bersama dengan
kabel RAD-CAB-EF393-10M khusus dan antena omnidirectional
RAD-ISM-2459-ANT-FOOD-6-0-N . Secara total, 3 antena dipasang pada excavator untuk komunikasi yang stabil.
Excavator ini juga memiliki
router 4G TC ROUTER 3002T-4G dengan antena directional lebar
5M TC ANT MOBILE WALL dan perangkat perlindungan lonjakan
CSMA-LAMBDA / 4-2.0-BS-SET .
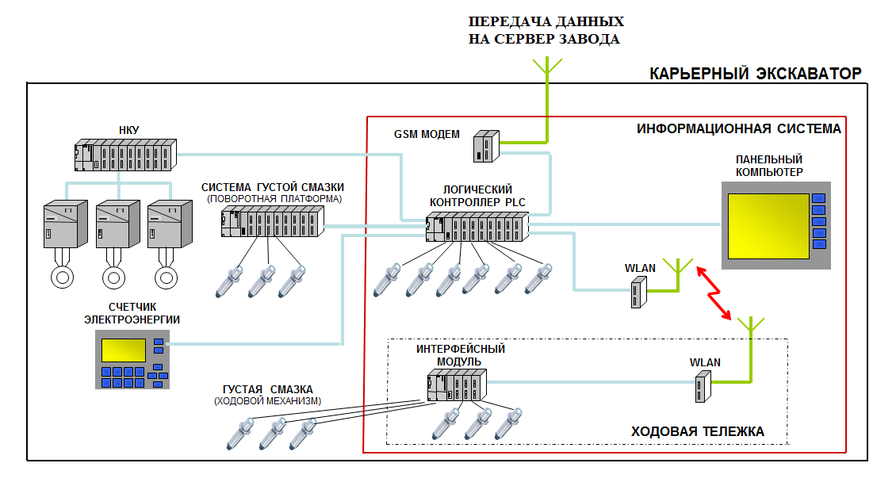
Blok diagram sistem informasi ekskavator penambangan

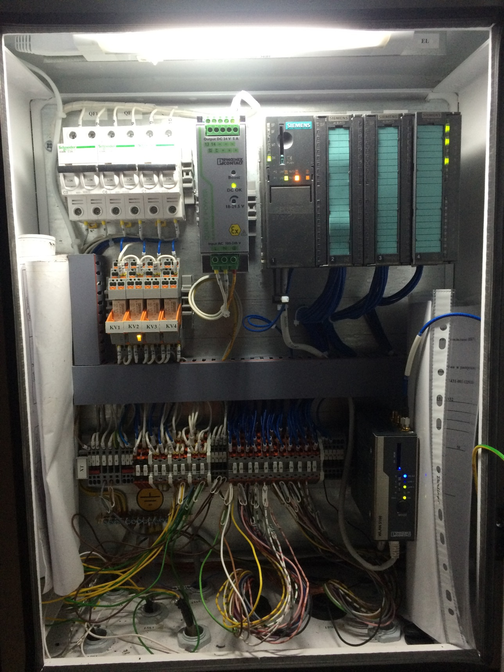
Pemasangan antena pada excavator ECG-20
Seperti apa bentuk kabin operator?
Hasil otomasi akhir untuk operator adalah sebagai berikut:

