 Apollo 11 di bulan
Apollo 11 di bulanLima bulan kemudian, Apollo 12 selamat dari petir saat akselerasi dan duduk di bulan. Berkat "kata benda 69" baru yang kami tambahkan ke program untuk memungkinkan tim mengubah posisi mereka berdasarkan data pelacakan darat, astronot Pete Conrad dan Alan Bean dapat mendaratkan modul bulan dalam jarak berjalan kaki dari orang tak berawak Surveyor kapal, yang mendarat di bulan pada bulan April 1967. Pendaratan tepat Apollo 12 membuka jalan bagi pendaratan di medan yang lebih kompleks.
Hanya setelah Apollo 12 kita mulai memahami masalah serius lainnya.
Saya mulai ketika Clint Tillman dari Grumman Aerospace (perusahaan pembuat modul bulan) memperhatikan getaran throttle sambil mensimulasikan tahap pendaratan terakhir ketika mesin dorong sekitar 5%. Hal ini mendorong Tilman untuk mempelajari data telemetri Apollo 11 dan 12, di mana ia memperhatikan fluktuasi pada tahap akhir pendaratan, memiliki amplitudo 25% dari puncak ke puncak (lihat Gambar 12). Ini adalah periode ketika komandan kapal secara bersamaan dapat menggunakan sakelar ROD untuk mengontrol kecepatan turun dan joystick untuk melakukan manuver kapal. Karena grafik data ini menyerupai dinding dan menara kastil (atau mur kastil), masalah ini disebut "throttle fortress."
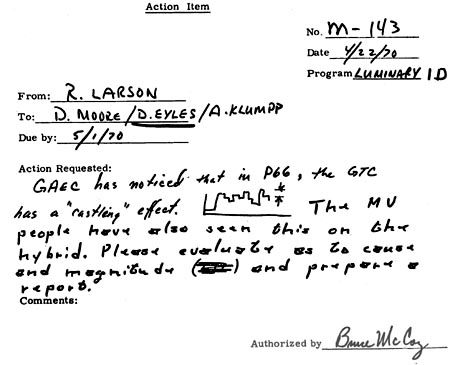
Fig. 11: Laporan Throttle Pertama
Clamp di Cambridge menggambarkan sumber eksitasi osilasi ke fenomena yang tidak diketahui, yang disebutnya "IMU bob" [18]. IMU terletak di atas, dan empat kaki di depan pusat massa kapal. Manuver kecil tapi cepat, seperti saat pendaratan akhir, melempar kapal sehingga accelerometer menafsirkan ini sebagai perubahan dalam kecepatan vertikal kapal. Ini, pada gilirannya, mempengaruhi perhitungan kecepatan vertikal, dan penilaian traksi yang diperlukan.
Tetapi teori ini hanya menjelaskan sebagian perilaku throttle yang diamati dalam data penerbangan.
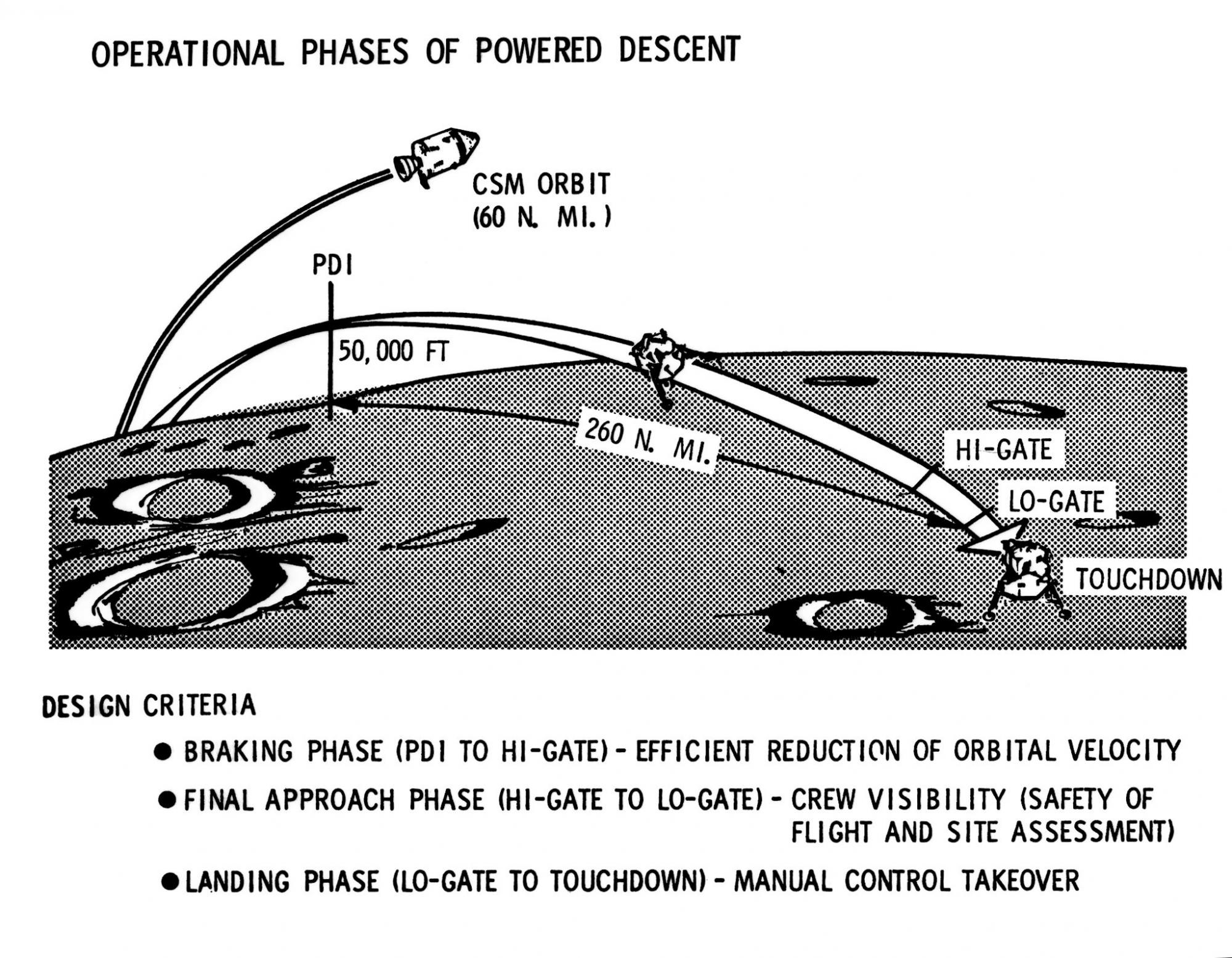
Mesin roket throttle adalah dan tetap langka, tetapi mesin throttle diperlukan untuk pendaratan lembut di bulan. Mesin dorong tetap dan persamaan gerak yang sangat sederhana dapat mendaratkan kapal melewati titik yang diinginkan di permukaan bulan. Tetapi untuk duduk terbalik, bergerak dengan lancar, memegang lokasi pendaratan di zona visibilitas, dan dengan kemampuan untuk melayang di atas lokasi pendaratan, kami membutuhkan mesin yang dapat menyeimbangkan gravitasi bulan, mengubah traksi ketika massa kendaraan berkurang, dan ketika mengubah vektor dorong selama manuver dan ketika para astronot ingin mengubah kecepatan keturunan.
Persamaan gerak menentukan percepatan apa yang harus diberikan pada peralatan, dengan besaran apa, dan ke arah mana. Autopilot melakukan manuver sehingga gaya traksi sesuai dengan arah yang diberikan. Tugas program kontrol throttle adalah mengendalikan traksi. Kontrol pelambatan dimulai dengan menghitung massa modul bulan. Mengetahui massa, kami menentukan jumlah koreksi throttle yang diperlukan untuk mengubah akselerasi kapal relatif terhadap yang diukur dengan akselerometer dengan nilai yang diperlukan untuk mematuhi persamaan gerak, dan mengonversi nilai yang dihasilkan ke unit yang digunakan oleh unit throttle (sekitar 2,8 pon per pulsa), dan mengirimkannya ke antarmuka perangkat keras.
Akselerometer dalam IMU tidak benar-benar mengukur akselerasi, mereka mengukur peningkatan kecepatan relatif terhadap pembacaan terakhir. Karena perubahan pelambatan selama iterasi sebelumnya terjadi di beberapa titik antara pembacaan accelerometer, delta-V yang diukur tidak menunjukkan efek penuh dari perubahan terbaru.
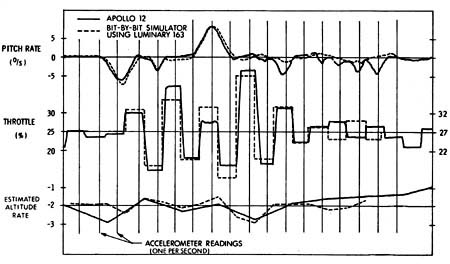
Fig. 12: Throttling berubah selama fase P66 dari penerbangan Apollo 12 [19]
Kontrol throttle seharusnya mengkompensasi efek ini. Serangkaian kompensasi tergantung pada kapan perintah throttle dikirim selama periode tersebut, dan juga tergantung pada kecepatan di mana mesin menjalankan perintah throttling. Studi eksperimental telah menetapkan bahwa pelambatan memiliki penundaan 0,3 detik.
Ini memungkinkan penulis untuk memprogram dan menguji program kontrol throttle. Dalam grafik simulasi model DPS yang tepat menggunakan penundaan 0,3 detik, saya mengamati osilasi dalam dorongan nyata yang terjadi setelah perubahan besar dalam posisi throttle, tanpa mengkompensasi keterlambatan throttle. Ketika saya menyalakan kompensasi untuk 0,1 detik, saya melihat bagaimana osilasi menurun. Ketika saya mengatur kompensasi ke 0,2 s, osilasi hampir menghilang. Itu sudah berakhir. Klump ingat bagaimana saya mengatakan: "Ini seperti obat, Anda tidak perlu memberikan kompensasi lebih dari yang diperlukan."
Klump tahu bahwa itu bukan "seperti obat," tetapi dia tidak pernah bersikeras bahwa saya memprogram nilai yang benar. Menjelaskan motivasinya setelah 15 tahun, Klump menulis:
“Saya pikir penting untuk membangun kepercayaan diri, untuk memungkinkan kolega membuat keputusan tentang masalah kecil, bahkan jika mereka tidak optimal. Karena itu, saya menahan pikiran saya dan mendukung keputusan Don yang berlaku, setidaknya sampai dia merevisinya sendiri ”[20].
Menjelaskan motif saya sendiri, saya percaya bahwa saya jengkel dengan kompensasi dalam program pelambatan yang sudah kelebihan beban, dan ini mungkin telah menghasilkan keinginan untuk membuat kompensasi sekecil mungkin. Namun Apollo 11 dan Apollo 12 terbang dengan kompensasi 0,2 detik dengan penundaan throttle 0,3 detik.
Tetapi sekarang baik analisis Klump [21] maupun laporan independen yang disiapkan oleh JA Sorensen di Bellcomm [22] telah menyimpulkan bahwa “sifat osilasi dari perintah pelambatan P66 jelas disebabkan oleh fakta bahwa nilai aktual konstanta waktu engine pendaratan kurang dari yang diharapkan ”(Sorensen). Klump memeriksa kembali data. Parameter mesin pendaratan ditingkatkan, tetapi perubahan yang sesuai tidak dibuat untuk dokumentasi. Penundaan sebenarnya untuk mesin pendaratan adalah sekitar 0,075 detik. Ternyata kami bahkan memberikan kompensasi yang berlebihan. Akibatnya, throttle berada di ambang stabilitas.
Analisis Clampp memberikan hasil yang lebih mengejutkan. Dia menunjukkan bahwa jika perangkat lunak Apollo 11 memberi kompensasi 0,3 s, throttle tidak akan stabil. Getaran throttle, bukannya menenangkan, akan menjadi lebih besar. Setelah throttling di P63 atau, mungkin, di P66 ketika IMU diberi energi, mesin DPS akan dengan cepat berosilasi antara dorongan minimum dan maksimum. Tidak diragukan lagi, kontrol penerbangan secara logis akan menghubungkan perilaku throttle dengan alarm 1202, yang memiliki penyebab yang sepenuhnya independen.
Kecelakaan tidak bisa dihindari. Menurut pendapat saya yang sederhana, jika penulis menyandikan nilai "benar" dalam program kontrol throttle, Apollo 11 tidak akan pernah duduk. Saya mengundang seseorang yang tidak memiliki minat pribadi dan fasih dalam matematika untuk memeriksa ulang teori ini.
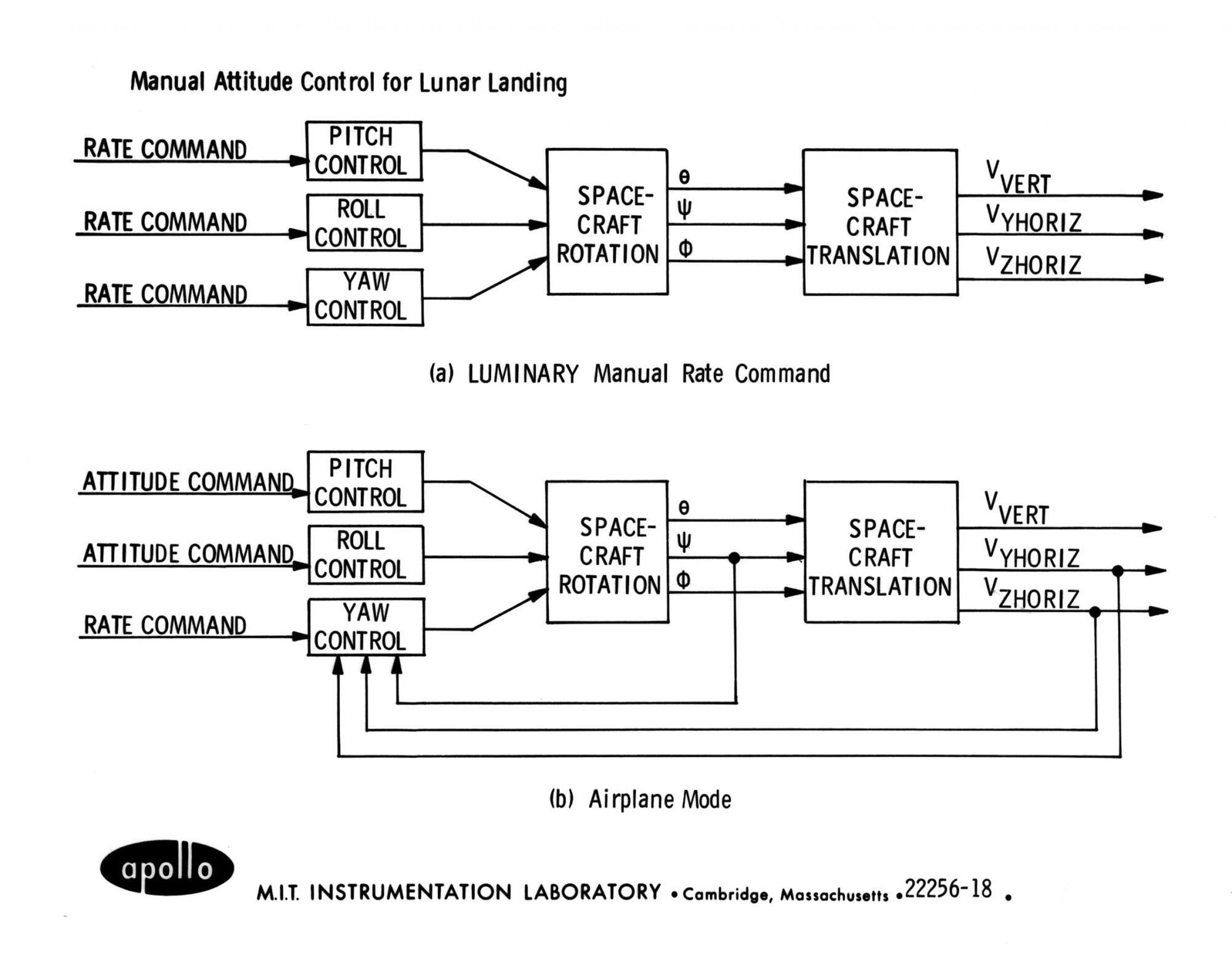
Pendaratan di bulan secara manual
* * *
Kami menyesuaikan penundaan throttle, dan simulasi menunjukkan bahwa ketidakstabilan posisi throttle telah hilang. Perubahan dilakukan pada perangkat lunak misi Apollo 13, tetapi misi ini tidak mendarat di bulan.
Sangat mengherankan bahwa perubahan dalam perangkat lunak Apollo 13 dilakukan sebelum masalah throttle diketahui, dapat memberikan opsi cadangan jika otomatisasi kontrol throttle tidak akan berfungsi. Suatu "kata benda 92" baru telah ditentukan, yang dapat dipilih oleh kru untuk melihat tingkat throttle yang dihasilkan oleh sistem kontrol. Logika yang akan menghentikan kontrol otomatis jika throttle untuk beralih ke mode MANUAL telah dihapus. Perubahan-perubahan ini [23] memungkinkan astronot untuk mengontrol throttle selama fase P63 dan P64, sementara sistem kontrol terus mengendalikan gerakan kapal. Saya tidak tahu apakah prosedur rumit ini pernah digunakan.
Alarm kelebihan eksekutif telah dialamatkan beberapa kali.
Sakelar kedekatan radar berada di posisi LGC saat lepas landas. Dalam misi berikutnya, daftar periksa telah diubah. Kami menambahkan logika ke LUMINARY untuk memeriksa mode operasi radar kedekatan, dan jika bukan LGC, penghitung radar kedekatan direset ke nol.
Alan Clump mempelajari Eksekutif dari perspektif yang berbeda. Dia menemukan bahwa ketika TLOSS komputer terjadi secara berkala, atau tingkat aktivitas komputer berubah di hadapan TLOSS, dan tugas SERVICER tidak selesai, dan terputus pada saat perintah perhitungan posisi dijalankan untuk mengirimnya ke autopilot, itu tidak dihapus oleh peranti lunak restart untuk untuk dipulihkan kemudian - dalam kondisi ini ada kemungkinan perhitungan posisi yang salah untuk autopilot. Untuk penerbangan Apollo 13, Klump mengembangkan solusi di mana semua pekerjaan SERVICER diatur ulang untuk mengejar ketinggalan jika perlu.
 Fase pendaratan di bulan
Fase pendaratan di bulanTetapi di masa depan, tidak ada perubahan ini yang membebaskan kita dari batasan periode dua detik yang tetap dari sistem orientasi. Untuk mendarat di medan yang sulit, perlu menambahkan model medan ke program radar. Modifikasi pada sistem orientasi dibiarkan untuk nanti. Kami tidak punya waktu untuk semuanya.
Kami mengembangkan konsep yang kami sebut "variabel SERVICER", di mana periode program orientasi dapat diperpanjang jika perlu. Kekhawatiran bahwa interval dua detik dibangun ke dalam perangkat lunak ternyata ternyata tidak berdasar. Itu hanya perlu untuk mengukur periode operasi sistem orientasi, dan menggunakan nilai ini alih-alih nilai dua detik, yang digunakan hanya dalam beberapa formula. Kami menerapkan versi kerja SERVICER dalam versi offline LUMINARY, dan menunjukkan resistensi yang sangat tinggi terhadap TLOSS [25].
Kebebasan dari batas dua detik memungkinkan gagasan lain dipertimbangkan. Astronot John Young mengusulkan perbaikan, yang kami sebut P66 LPD. Tetapi pada saat ini, P66 adalah program yang jauh lebih fleksibel daripada penerbangan Apollo 11 di Armstrong. Salah satu fitur baru adalah jika tim mengubah mode ATT HOLD ke AUTO, sistem orientasi akan menghasilkan kecepatan nol horisontal. Gagasan Young adalah agar LGC untuk menampilkan sudut LPD (seperti pada fase terlihat), yang akan menunjukkan komandan titik di mana modul bulan terbang jika pada saat itu autopilot dialihkan ke AUTO [26].
Untuk memastikan keakuratan dalam melakukan fungsi ini, perangkat lunak harus bereaksi secara instan ketika astronot beralih ke AUTO, lebih cepat dari dua detik, dan bahkan lebih cepat dari periode kedua yang diizinkan, yang bekerja dengan beberapa bagian P66. Kami mengembangkan versi di mana tugas diluncurkan setiap seperempat detik, memeriksa perubahan dalam mode autopilot, mengirim perintah orientasi dan throttle, dan merespons secepat dan seakurat mungkin ke input dari saklar ROD. Dalam simulasi berawak yang berjalan di simulator modul bulan (LM Mission Simulator, LMS) di Cape Canaveral, dengan model medan yang luar biasa terlihat di jendela, kami menunjukkan bahwa sistem ini memfasilitasi pendaratan yang sangat akurat.
Baik "variabel SERVICER" maupun LPD P66 tidak pernah ditambal. NASA telah memutuskan bahwa Apollo 17 akan menjadi yang terakhir. Dengan begitu sedikit misi yang tersisa, dewan pemerintahan membuat keputusan konservatif - seharusnya tidak ada perubahan signifikan pada perangkat lunak pendaratan. Dengan menyinkronkan data yang diterima dari radar pendaratan dengan pembacaan accelerometer, Robert Covelli meluangkan waktu yang cukup untuk memeras model medan untuk Apolos 15, 16 dan 17 di sana.
 Inertial Module (IMU) di MIT Lab
Inertial Module (IMU) di MIT LabApollo 14 membawa ketenaran jangka pendek penulis. Sakelar interupsi dasbor mengirimkan sinyal berkala yang mencegah Alan Shepard dan Ed Mitchell duduk. Saya menulis kode yang memonitor kasus-kasus ini. "Penopang" ini hanya mengubah beberapa register, yang pertama untuk mengelabui monitor gangguan misi menjadi berpikir bahwa gangguan sudah terjadi, dan kemudian menghapus sendiri sehingga pendaratan dapat berlanjut tanpa konsekuensi. Tambalan itu disiarkan di udara dan dijalankan oleh para astronot dengan sempurna, prosedur ini termasuk 61 penekanan tombol pada DSKY. Mungkin bagian paling menarik dari insiden Apollo 14 adalah jumlah versi yang berbeda dari cerita ini. Tapi Apollo 14 adalah cerita lain.
Pada Desember 1972, saya pergi ke Cape Canaveral untuk meluncurkan kapal Apollo 17. Penerbangan luar angkasa ini luar biasa. Penulis Tom Wolfe, bersama dengan fotografer Annie Leibovitz, menulis sebuah cerita pendek empat bagian untuk majalah Rolling Stone, yang merupakan cikal bakal "The Right Stuff" [27]. Itu adalah satu-satunya peluncuran Apollo semalam. Langit berkabut Florida membakar oranye dari cakrawala ke cakrawala ketika Saturnus V yang besar menjulang ke atas pada seperempat mil kolom api yang bergoyang di ujungnya seperti nyala obor.
Saya menghabiskan beberapa hari menguji beberapa fungsi LMS yang kami sebut "pemrograman memori yang bisa dihapus". Ini adalah tambalan yang seharusnya menggunakan VAC yang tidak terpakai dan menambal beberapa bug, warisan dari peristiwa Apollo 14. Kemudian saya terbang ke Cambridge untuk menyaksikan pendaratan.
Setelah itu, saya menikmati mendengarkan Gene Cernan dan Jack Schmitt, seorang ahli geologi dengan pelatihan, menjelajahi Bulan dengan baling-baling bulan, setelah melakukan perjalanan lebih dari 3 mil dari pandangan pesawat ruang angkasa. Dan ini adalah terakhir kali seseorang berjalan di bulan.
Fig. 13: Beberapa peserta.
Foto yang luar biasa, baris depan: Vince Megna, “Doc” Charles Stark Draper, penulis, Dave Moore, Tony Cook; baris belakang: Phil Felleman, Larry Berman, Allan Klumpp, Bob Werner, Robert Lones, Sam Drake. Foto kecil, barisan depan: Larry Berman, Peter Volante, penulis; baris belakang: Sam Drake, Bruce McCoy. Turut berpartisipasi dalam acara tersebut adalah Steve Copps, Romilly Gilbert, Ken Goodwin dan Russ Larson.
Referensi[1] Klumpp, AR; "Bimbingan Pendaratan Apollo Lunar"; Laboratorium Draper Stark MIT Charles, R-695; Juni, 1971.
[2] Cherry, GW; "E-Guidance - A General Explicit, Mengoptimalkan Hukum Bimbingan untuk Pesawat Luar Angkasa yang Didorong Roket"; Laboratorium Instrumentasi MIT, R-456; Agustus 1964.
[3] Brooks, Courtney G., et al; "Kereta untuk Apollo, Sejarah Pesawat Luar Angkasa Bulan Berawak"; NASA 1979.
[4] Perak, George; komunikasi pribadi; 2004
[5] Hall, Penatua C.; Journey to the Moon: Sejarah Komputer Bimbingan Apollo; AIAA, 1996.
[6] Blair-Smith, Hugh; "Petunjuk Blok II"; Laboratorium Instrumentasi MIT, AGC4 Memo 9; 1 Juli 1966.
[7] Muntz, Charles A.; "Panduan Pengguna untuk Interpreter AGC / LGC Blok II"; Laboratorium Instrumentasi MIT, R-489; April 1965.
[8] Data Downlink Apollo 11.
[9] Pembekalan Awak Teknis Apollo 11; NASA, 31 Juli 1969 [Pembekalan].
[10] Transkripsi Suara Teknis Udara-ke-Tanah Apollo 11; NASA, Juli 1969 [Suara].
[11] Suara.
[12] Pembekalan.
[13] Laporan Misi Apollo 11; NASA, SP-238.
[14] Pembekalan.
[15] Pembekalan.
[16] Suara.
[17] Klumpp, A.; memo tanpa judul tentang plot waktu nyata untuk memantau aktivitas komputer; Laboratorium Draper MIT Charles Stark, 9 April 1970.
[18] Klumpp, A. dan Kalan, G.; "Penghapusan Kebisingan dan Peningkatan Stabilitas dan Respon Dinamis dari Program Tingkat-of-Keturunan Apollo LM"; Laboratorium Draper MIT Charles Stark, E-2543, Oktober 1970 [Kebisingan].
[19] Kebisingan.
[20] Klumpp, Allan; komunikasi pribadi; 1985.
[21] Kebisingan.
[22] Sorensen, JA; "Analisis Stabilitas Linier dari Persamaan Pedoman Tingkat-of-Descent LM"; Bellcomm Inc., B70 06074, 25 Juni 1970.
[23] Tindall, HW dan Garman, Jack; “Hapus centang Auto Throttle Discrete”; LUMINER 1C Permintaan Perubahan Program (PCR) 285, 30 September 1969.
[24] Eyles, D.; "Cegah ECDU RR dari Mencuri Siklus Memori LGC"; LUMINER 1B PCR 848, 23 Juli 1969.
[25] Eyles, Don; "Deskripsi Penyedia Variabel"; Laboratorium Draper Stark MIT Charles, Memo 139 Luminary, 3 Maret 1970.
[26] Eyles, Don; "Bimbingan Apollo LM dan Bantuan Percontohan Selama Tahap Akhir Keturunan Bulan"; Laboratorium Draper MIT Charles Stark, E-2581; Mei 1971.
[27] Wolfe, Tom; Penyesalan Pasca-Orbital Batu bergulir; 4 Januari 1973.